Изобретение относится к текстильной промышленности и позволяет повысить качество смешивания волокнистого материала.
Для этого способ смешивания волокнистого материала включает операцию загрузки волокнистого материала с образованием смесового настила, состоящего из горизонтальных слоев, выгрузки материала из камеры с одновременным смешиванием слоев настила путем его отбора по вертикали при перемещении настила к отборному органу.
При загрузке каждый последующий слой настила имеет длину, меньшую предыдущего. Противоположная плоскости отбора сторона смесового настила образует с горизонтальной плоскостью угол 40-75о, а отобранный материал укладывают на стороне настила, противоположной плоскости отбора.
Способ смешивания волокнистого материала и устройство его осуществления поясняются фиг. 1-6.
На фиг. 1 показана технологическая схема операции загрузки; на фиг. 2 технологическая схема операции выгрузки; на фиг. 3 принципиальная схема управления смешивающей машины.
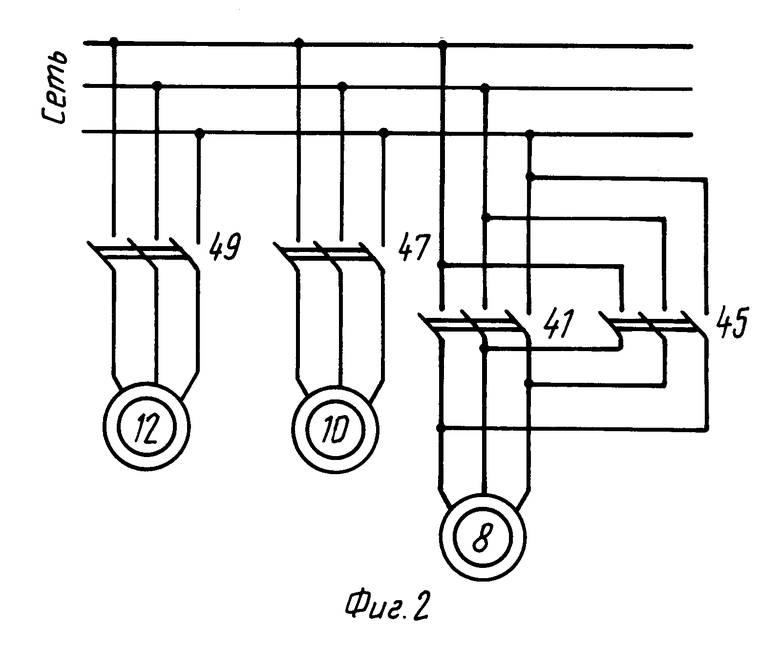
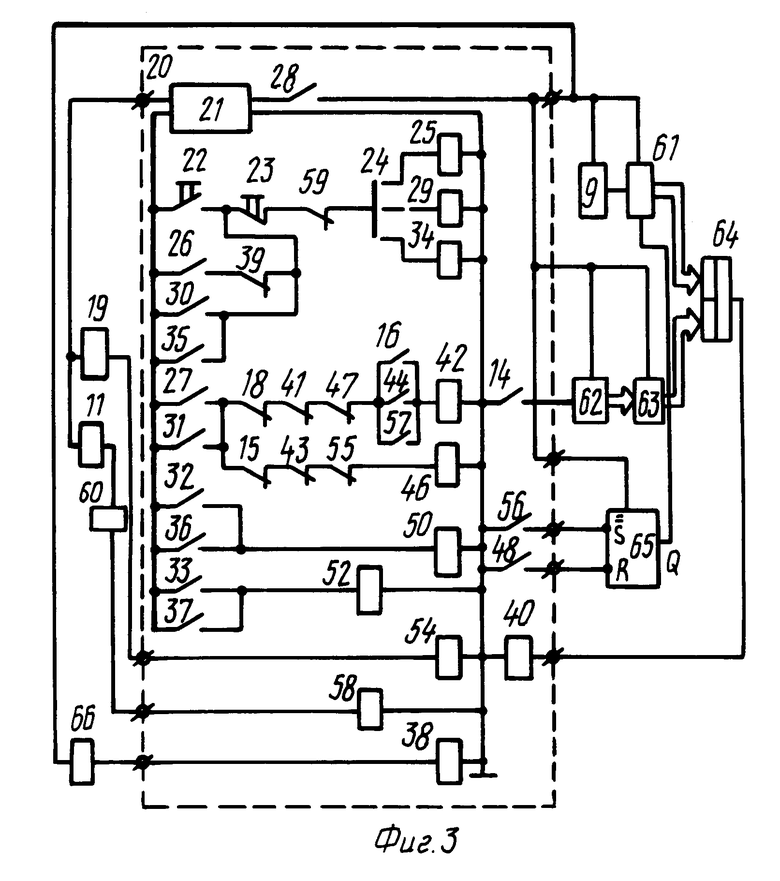
Устройство смешивания волокнистого материала состоит из камеры 1, загрузочного средства 2 в виде телескопического распределителя волокна, подающего транспортера 3, отборочной решетки 4 (отборного органа), разравнивающего барабана 5, сбивного барабана 6, смесового настила 7, электродвигателя привода загрузочного средства 8, датчика перемещения загрузочного средства 9, электродвигателя привода подающего транспортера 10, датчика перемещения подающего транспортера 11, электродвигателя привода отборочной решетки 12, датчика исходного положения загрузочного средства 13, его контактов 14, 15, 16, датчика конечного положения загрузочного средства 17, его контакта 18, датчика промежуточного положения загрузочного средства 19, схемы управления 20, в которую входит источник питания 21, кнопка "Пуск" 22, кнопка "Стоп" 23, переключатель режимов 24, реле 25 (контакты 26, 27, 28), реле 29 (контакты 30-33), реле 34 (контакты 35, 36, 37), реле 38 (контакты 39), реле 40 (контакт 41), реле 42 (контакты 43, 44, 54), реле 46 (контакты 47, 48, 49), реле 50 (контакт 51), реле 52 (контакт 53), реле 54 (контакты 55, 56, 57), реле 58 (контакт 59). Кроме того, устройство содержит счетчик оборотов подающего транспортера 60, счетчик координат загрузочного средства 61, счетчик ходов загрузочного средства 62, блок хранения координат конечных положений загрузочного средства 63, схему сравнения кодов 64, триггер 65, датчик заполнения камеры 66.
Установка имеет три режима работы: режим "Загрузка", режим "Перемешивание", режим "Выгрузка". В режиме "Загрузка" происходит раскладка волокна, поступающего от кипного питателя и очистителя на подающий транспортер 3 при помощи загрузочного средства (телескопического распределителя волокна) 2, который совершает возвратно-поступательное движение в камере 1 между датчиком 13 исходного положения и датчиком 17 конечного положения При этом левая сторона смесового настила 7 получается под углом 40-75о за счет сокращения пути, проходимого телескопическим распределителем волокна 2 в каждом ходу примерно на толщину укладываемого слоя.
Если волокнистый смесовой настил укладывают слоями, то путь телескопического распределителя волокна за один его ход сокращается на длину l ≈h, а так как раскладка волокна происходит при движении телескопического распределителя волокна вперед и назад, т.е. за один цикл укладываются примерно два слоя толщиной 2h. Загрузка заканчивается после того, как смещение последнего слоя в сторону отборочной решетки равно произведению толщины слоя h на количество слоев n, т.е. L≈h x n, где L величина смещения последнего (верхнего) слоя.
Транспортер 3 при этом неподвижен. При достижении смесовым настилом датчика заполнения камеры 66 загрузка волокна заканчивается и транспортер 3 начинает перемещение к отборочной решетке 4. Начинается режим "Перемешивание". Отборочная решетка 4 совершает отбор волокна и подает его через разравнивающий барабан 5 назад в телескопический распределитель 2, который совершает возвратно-поступательное движение между датчиками 17 и 19. При этом слой, падая на левую стенку смесового настила, расположенную под углом 40-75о, укладывается также в слои, расположенные под этим углом, при этом начинает образовываться как бы второй смесовой настил, состоящий из наклонных слоев. Перемешивание заканчивается после того, как весь смесовой настил 7, состоящий из горизонтальных слоев, перемещается по транспортеру 3 к отборочной решетке 4.
В режиме "Выгрузка" подающий транспортер 3 перемещает смесовой настил, состоящий из наклонных слоев к отборочной решетке 4, которая совершает отбор волокна. Телескопический распределитель волокна в этом режиме не работает. Волокно с отборочной решетки передается сбивным барабаном 6 к выходу из камеры. Работа машины в режиме "Выгрузка" заканчивается, когда отборочной решеткой закончен отбор второго смесового настила.
Управление процессом смешивания осуществляют следующим образом.
Для установки системы управления в режиме "Загрузка" необходимо переключатель режимов 24 установить в положение "Загрузка", после чего нажать кнопку "Пуск" 22, при этом срабатывает реле 25, замыкаются его контакты 26, 27, 28, реле 25 становится на самопитание, подается питающее напряжение в цепи реле 42 и реле 45, управляющих движением загрузочного средства 2, контактом 28 подается питающее напряжение на датчик перемещения загрузочного средства 9, счетчик координат загрузочного средства 61, счетчик ходов загрузочного средства 62, блок хранения координат конечных положений загрузочного средства 63, схему сравнения кодов 64, триггер 65.
Загрузочное средство производит раскладку волокна. В исходном положении у отборочной решетки загрузочное средство воздействует на датчик положения загрузочного средства 13, при этом его контакт 15 разомкнут, контакт 16 замкнут, контакт 14 замкнут. Цепь питания реле 42 замкнута, реле срабатывает и становится на самоблокировку контактом 44, и загрузочное устройство 2 начинает движение вперед. Датчик исходного положения загрузочного средства 13 освобождается от воздействия, контакт 14 разомкнут, дает сигнал на счетчик ходов загрузочного средства 62. Код, соответствующий номеру хода, подается на блок хранения координат конечных положений загрузочного средства 63, он выдает код координат конечного положения на схему сравнения 64. Когда загрузочное средство 2 доходит до датчика промежуточного положения загрузочного средства 19, срабатывает реле 54, которое контактом 56 устанавливает триггер 65 в состояние "1", разрешая работу счетчика координат загрузочного средства 61, загрузочное средство 2 возвращается в исходное положение, воздействуя на датчик исходного положения загрузочного средства 13. При этом контакты датчика исходного положения загрузочного средства 13 срабатывают, контакт 14 замыкается, контакт 15 размыкается, разрывая цепь питания реле 46, контакт 16 замыкается, включая реле 42. Загрузочное средство 2 начинает движение вперед, а счетчик ходов загрузочного средства 62 фиксирует второй ход, и цикл повторяется.
Режим "Загрузка" продолжается до заполнения камеры 1 и определяется высотой смесового настила 7, который контролируется датчиком заполнения камеры 66. При достижении смесовым настилом 7 уровня датчика заполнения камеры 66 включается промежуточное реле 38, которое своим контактом 39 размыкает цепь реле 25. Загрузочное средство 2 останавливается, загрузка камеры 1 окончена.
Для перехода в режим "Перемешивание" переключатель режимов 24 устанавливается в среднее положение. При этом нажимают кнопку "Пуск" 22, срабатывает реле 29, оно самоблокируется контактом 30, а контактом 31 подготавливается цепь реле 42 и реле 46, включается реле 50, контакт 33 включает реле 52. В результате этого приводят в движение загрузочное средство 2, подающий транспортер 3, отборочная решетка 4, разравнивающий барабан 5, сбивной барабан 6.
Загрузочное средство 2 движется следующим образом. В исходном положении оно воздействует на датчик исходного положения загрузочного средства 13, его контакт 16 замкнут, включается реле 42, и загрузочное средство 2 движется вперед. Оно доходит до датчика конечного положения загрузочного средства 17, его контактом 18 размыкается цепь питания реле 42, реле выключается и контактом 43 замыкается цепь реле 45. Загрузочное средство 2 движется назад. Когда оно доходит до датчика промежуточного положения загрузочного средства 19, срабатывает реле 54, которое своим контактом 55 размыкает цепь реле 46, и контакт 57 замыкает цепь реле 42. Загрузочное средство 2 делает реверс и движется вперед. Такое движение загрузочное средство 2 совершает между датчиком 17 и датчиком 19. Подающий транспортер движется, перемещая смесовый настил 7 в сторону отборочной решетки 4. За один оборот вала электродвигателя подающего транспортера 10 срабатывает датчик перемещения подающего транспортера 11.
Счетчик оборотов подающего транспортера 60 считает число импульсов и сравнивает его с заданным. Когда число импульсов достигнет заданного, срабатывает реле 58, которое своим контактом 59 размыкает цепь реле 29. Процесс "Перемешивание" закончен. Начинается режим "Выгрузка".
Переключатель режимов 24 устанавливают в положение " Выгрузка" (нижнее), нажимают кнопку "Пуск" 2, срабатывает реле 34, его контакты 36, 37 включают реле 50 и 52. Контактами этих реле включаются электродвигатель привода подающего транспортера 10 и электродвигатель привода отборочной решетки 12. Подающий транспортер 3 перемещает смесовой настил 7 в сторону отборочной решетки 4, длительность процесса выгрузки контролируется аналогично процессу перемешивания по числу оборотов электродвигателя привода подающего транспортера 10.
Осуществление предлагаемых способа и устройства позволяет значительно повысить качество смешивания волокнистых материалов в пределах одной камеры, так как камера используется по существу дважды для двукратного перемешивания заданного объема волокна.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ПЕРЕРАБОТКИ ВОЛОКНИСТОГО МАТЕРИАЛА | 1990 |
|
RU2016925C1 |
| СПОСОБ ПЕРЕРАБОТКИ ВОЛОКНИСТОГО МАТЕРИАЛА | 1991 |
|
RU2044805C1 |
| СЕПАРАТОР ДЛЯ ВЫДЕЛЕНИЯ ПРИМЕСЕЙ ИЗ ВОЛОКНИСТОГО МАТЕРИАЛА | 1992 |
|
RU2036259C1 |
| УСТРОЙСТВО ДЛЯ РЫХЛЕНИЯ КИП ВОЛОКНИСТОГО МАТЕРИАЛА | 1991 |
|
RU2026901C1 |
| УСТРОЙСТВО ДЛЯ СМЕШИВАНИЯ ВОЛОКНИСТОГО МАТЕРИАЛА | 1993 |
|
RU2037573C1 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ ВОЛОКНОВОЗДУШНОЙ СМЕСИ | 1991 |
|
RU2006292C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОЛЬЦЕВОГО ПРЯДЕНИЯ | 1992 |
|
RU2041980C1 |
| Устройство для смешивания волокнистого материала | 1985 |
|
SU1298269A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ БОБИН | 1991 |
|
RU2043289C1 |
| СПОСОБ ПОЛУЧЕНИЯ СМЕШАННОЙ ВОЛОКНИСТОЙ ЛЕНТЫ | 1992 |
|
RU2057212C1 |
Сущность изобретения: способ смешивания волокнистого материала содержит операции загрузки волокна с образованием настила, который состоит из горизонтальных слоев, и выгрузки материала с одновременным смешиванием слоев настила путем его отбора по вертикали при перемещении настила к отборному органу. При загрузке каждой последующий слой настила имеет длину, меньшую предыдущего. Противоположная плоскости отбора сторона смесового настила образует с горизонтальной плоскостью угол 45-75°, а отобранный материал укладывают на стороне настила, противоположной плоскости отбора. Устройство для смешивания волокнистого материала включает камеру 1, загрузочное средство волокна 2 в виде телескопического распределителя волокна, подающего транспортера, отборочной решетки 4, разрешающего барабана 5, сбивного барабана 6 и постели 7, привода загрузочного средства 8, датчик загрузочного средства 9, привод подающего транспортера 10, датчик перемещения подающего транспортера 11, привод отборочной решетки 12, датчики положения загрузочного средства 13 с контактами, схему управления, включающую источник питания, кнопку "Пуск", кнопку "Стоп", переключатель режимов, включающий несколько реле, переключатель направления движения загрузочного средства, счетчик оборотов подающего транспортера, счетчик координат загрузочного средства, счетчик кодов, блок хранения координат конечных положений загрузочного средства, схему сравнения кодов, триггер. 2 с.п. ф-лы, 3 ил.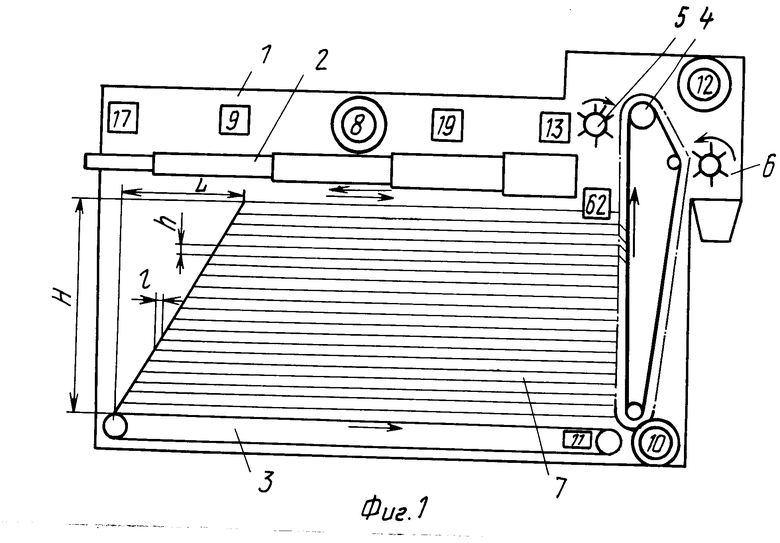
Способ смешивания волокнистого материала, включающий операцию загрузки волокнистого материала с образованием смесового настила, состоящего из горизонтальных слоев, выгрузки материала из камеры с одновременным смешиванием слоев настила путем его отбора по вертикали при перемещении настила к отборному органу, отличающийся тем, что при загрузке каждый последующий слой настила имеет длину, меньшую длины предыдущего слоя, при этом противоположная плоскости отбора сторона смесового настила образует с горизонтальной плоскостью угол 40 75o, причем отобранный волокнистый материал укладывают на стороне настила, противоположной плоскости отбора для обеспечения повторного перемешавания.
| Устройство для разгрузки смесовой камеры | 1986 |
|
SU1481276A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
