Изобретение относится к контрольно-измерительной технике и может быть использовано в системах управления и централизованного контроля объектов с непрерывными многопараметрическими технологическими процессами в энергетической, химической, металлургической и других отраслях промышленности.
При управлении указанными динамическими объектами актуальной является задача оперативной и достоверной оценки состояния объекта для своевременного обнаружения и локализации возможных аварийных ситуаций и недопустимых отклонений в его работе [1]
Целью предлагаемого изобретения является обеспечение оперативности управления объектом путем повышения информационной эффективности контроля объекта.
Эта цель достигается тем, что по предлагаемому способу состояние объекта представляют изображением кривой второго порядка на экране средства отображения информации (СОИ), который соединяют с выходом вычислительного устройства, формирующего изображение кривой по ее уравнению, коэффициенты которого образуют с помощью сигналов от датчиков контролируемых параметров объекта, величины которых определяют форму, размеры и положение кривой на экране СОИ.
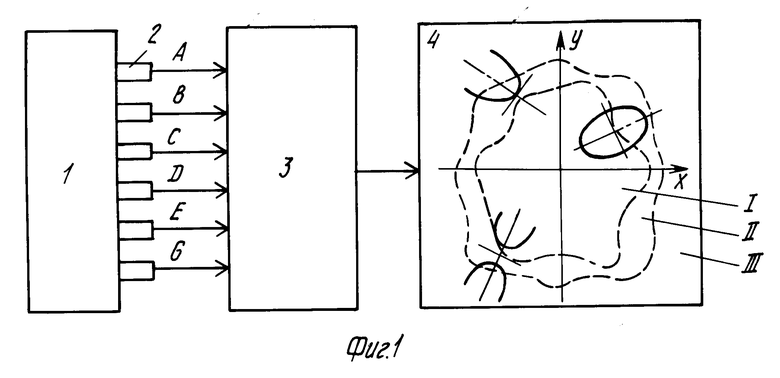
Предлагаемый способ поясняется структурной схемой, приведенной на фиг.1. Схема содержит объект контроля 1, датчики 2 контролируемых шести параметров А, В, С, D, Е и G, вычислительное устройство 3, формирующее кривую второго порядка, средство 4 отображения информации, на экране которого производится отображение кривой второго порядка. На экране пунктирными линиями показаны области положения центра кривой: I для нормальных режимов работы объекта, II для предельно-допустимых, III для недопустимых режимов и аварийных ситуаций. На экране показаны также три возможные формы кривой второго порядка это эллипс (как частный случай окружность), парабола и гипербола и варианты возможного положения этих кривых относительно координат х, y.
Схема на фиг.1 представляет собой, в сущности, отображение топологического пространства состояний объекта в соответствии с выражением:
f: M _→ N, (1) где М и N отображаемое и отображенное топологические пространства состояний объекта соответственно;
f функция отображения.
Функция отображения f в данном случае представляет собой уравнение кривой второго порядка:
f(x,y) Ax2 + 2Bxy + Cy2 + 2Dx +
+ 2Ey + G 0, (2) где А, В, С, D, Е и G коэффициенты уравнения, соответствующие величинам контролируемых параметров;
x, y координаты, определяющие положение кривой на плоскости.
Форма кривой второго порядка, как известно [2] определяется знаком дискриминанта:
δ АC B2. (3)
При δ> 0 кривая имеет вид эллипса (А ≠С) или окружности (А С, В=0), при δ< 0 кривая имеет вид гиперболы; при δ 0 кривая имеет вид параболы. Последний случай для изменяющихся параметров динамического объекта маловероятен.
На фиг. 2 показаны величины, определяющие размеры кривой это величины главных осей для эллипса (2а1, 2b1) и гиперболы (2а2, 2b2), а также величины, определяющие положение кривой на плоскости относительно координат x, y это направление и величина угла поворота главных осей кривой для эллипса ( α1) и гиперболы (- α2), смещение центра кривой относительно начала координат для эллипса (x01, y01) и гиперболы (x02, y02). Указанные величины определяются следующими формулами:
a2=  , (4)
, (4)
b2=  , (5)
, (5)
I1= 

 (6) где λ1,2=
(6) где λ1,2=  (7)
(7)
λ1,2 корни характеристического уравнения кривой второго порядка;
tg2α  , (8)
, (8)
xo=  , (9)
, (9)
yo=  . (10)
. (10)
Из теории топологии [3] следует, что достоверность контроля объекта при применении предлагаемого способа обеспечивается соблюдением условий гомеоморфности отображаемого М и отображенного N пространств состояний контролируемого объекта. Условия гомеоморфности пространств М и N соблюдаются началом шести уравнений (2), (4), (5), (8), (9) и (10), позволяющих производить взаимно обратные отображения f M _→ N и f-1: N _→ M, т.е. каждой совокупности шести контролируемых параметров однозначно соответствует конкретная кривая на плоскости и, наоборот, каждой кривой однозначно соответствуют конкретные значения шести контролируемых параметров.
Формирование коэффициентов уравнения кривой целесообразно производить на основе соотношений, описывающих условия баланса материальных потоков, теплового баланса и других соотношений, наиболее полно характеризующих протекание рабочих процессов, определяемых контролируемыми параметрами объекта. Отклонения в функционировании объекта будут приводить к нарушению этих соотношений, что, в свою очередь, приведет к изменению контролируемых параметров объекта, т. е. к изменению коэффициентов уравнения кривой (2) и, следовательно, к изменению формы и размеров кривой или ее положения на плоскости экране средства отображения информации в соответствии с формулами (3) (10).
Возможны следующие варианты применения предлагаемого способа. Если состояние объекта можно определить тремя параметрами, то уравнение кривой (2) упрощается и принимает вид;
f(x,y) Ax2 + 2Bxy + Cy2 0 (11)
В этом случае, как это видно из формулы (3), в качестве признака нарушения технологического процесса или наступления аварийной ситуации целесообразно использовать изменение формы кривой (от эллипса к гиперболе). Одновременно в качестве признака оптимальности процесса можно использовать в этом случае величину параметра В, поскольку он определяет близость эллипса к окружности (при В 0 эллипс переходит в окружность). В качестве дополнительного признака нарушения работы объекта, как это видно из формулы (8), также можно использовать направление и величину угла поворота α главных осей кривой относительно координат х, y. Если состояние объекта определяется четырьмя или пятью параметрами, то, как это видно из формул (9) и (10), в качестве дополнительных признаков нарушения работы объекта можно использовать изменение положения центра кривой относительно начала координат х, y; т.е. изменение величин х0 и y0. При этом ориентиром будут служить границы областей I, II и III (фиг.1), Эти границы можно заранее нанести на экран СОИ путем подачи на вход вычислительного устройства предельно допустимых и аварийных величин параметров объекта.
Если состояние объекта определяется шестью параметрами, то возникновение аварийной ситуации и нарушение работы объекта можно определить с помощью всех указанных выше признаков. Кроме того, изменение параметра G (при постоянстве остальных параметров) можно определить по изменению главных осей 2а и 2b в соответствии с выражениями (4) и (5).
Наконец, если состояние объекта определяется более чем шестью параметрами, то часть из них можно объединить, например, суммированием, для того, чтобы сформировать не более шести коэффициентов указанного уравнения кривой второго порядка.
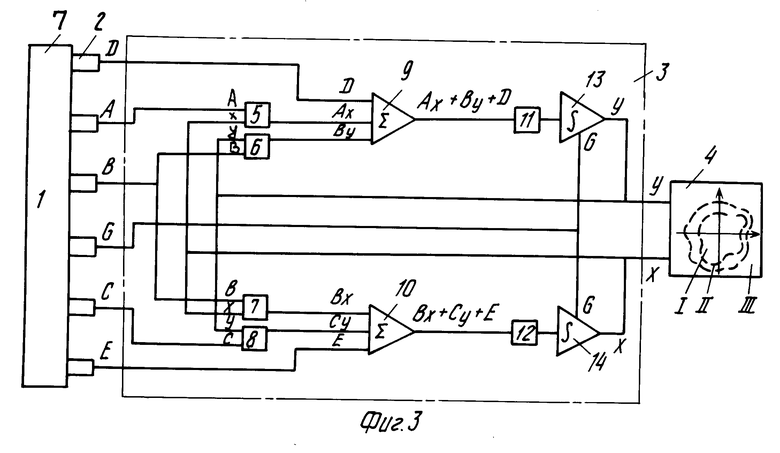
Устройство для осуществления предлагаемого способа, показанное на фиг.3, отличается тем, что, с целью повышения информационной эффективности контроля объекта, его состояние представлено изображением кривой второго порядка на экране осциллографа, соединенного с выходом аналогового вычислительного устройства (АВУ), построенного на основе четырех блоков умножения, двух блоков суммирования, двух блоков масштабных коэффициентов и двух блоков интегрирования, формирующего изображение кривой по ее уравнению, коэффициенты которого образованы с помощью сигналов от датчиков контролируемых параметров объекта, электрически соединенных с входом АВУ.
Для пояснения работы устройства уравнение кривой второго порядка (2) следует представить в виде следующей системы дифференциальных уравнений: ω
ω  2ω(Bx+Cy+E)
2ω(Bx+Cy+E)
(12) -ω
-ω  -2ω(Ax+By+D) где ω const скорость движения луча осциллографа при отображении кривой на его экране.
-2ω(Ax+By+D) где ω const скорость движения луча осциллографа при отображении кривой на его экране.
Непрерывное решение этой системы дифференциальных уравнений с помощью указанного АВУ позволяет получить на экране осциллографа изображение кривой второго порядка, изменяющееся в соответствии с изменением контролируемых параметров объекта.
Согласно блок-схеме на фиг.3 и системе уравнений (12), электрические сигналы, пропорциональные величинам параметров А, В и С, с выхода соответствующих датчиков поступают на вход блоков умножения 5-8. С выхода этих блоков произведения Ах, By, Bx и Cy поступают на входы соответствующих блоков суммирования 9 и 10. На блок 9 поступает также сигнал, пропорциональный параметру D, а на блок 10 пропорциональный параметру Е. На выходе блоков 9 и 10 получаются сигналы, пропорциональные суммам (Ах и By + D) и (Вх + Cy +Е) соответственно. Эти сигналы проходят через блоки масштабных коэффициентов 11 и 12, равных 2, в соответствии с правой частью уравнений (12), и поступают на входы блоков интегрирования 13 и 14. На эти же блоки с выхода соответствующего датчика поступает в качестве начального условия электрический сигнал, пропорциональный величине параметра G. Согласно левой части уравнений (12), на выходе блоков интегрирования получим:
x ∫dx ωt  ,
,
(13)
y ∫dy -ωt  .
.
С выхода блока 14 величина х поступает на вход блоков 5 и 7, а с выхода блока 13 величина y поступает на вход блоков 6 и 8- для умножения на коэффициенты А, В и С, как было указано выше.
Из правой части уравнений (12) и (13) видно, что сигналы на выходе блоков 13 и 14 будут пропорциональны соответствующим слагаемым уравнения (2), а именно:
ω∫∂f(x,y) 2ω∫(Bx+Cy+E)∂y ω(2Bxy+Cy2+2Ey+G)
(14)
-ω∫∂f(x,y) -2ω∫(Ax+By+D)∂x -ω(Ax2+2Bxy+2Dx+G)
Эти сигналы поступают на вход осциллографа. Следовательно, на его экране появится изображение кривой второго порядка, форма, размеры и положение которой относительно координат х и y будет соответствовать величинам шести параметров контролируемого объекта в данный момент времени.
Использование изобретения позволяет повысить скорость восприятия и обработки обслуживающим персоналом информации, уменьшить габариты пультов управления и получить значительный экономический эффект. Это определяется применением на пульте управления вместо трех-шести средств отображения информации только одного и исключением из функций персонала операций по анализу и сопоставлению показаний нескольких приборов для оценки общего состояния объекта и принятия решений по локализации аварийной ситуации и устранению причин возникших нарушений в работе объекта.
Экономический эффект обеспечивается своевременным обнаружением и локализацией аварийных ситуаций. Наиболее значительный эффект можно ожидать при контроле технологических процессов непрерывного характера, например, в химическом и нефтеперерабатывающем производствах, когда даже кратковременное нарушение хода процесса приводит к выпуску некачественной продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования изображений кривых второго порядка на экране телевизионного приемника | 1988 |
|
SU1596376A1 |
| СПОСОБ ПОСТРОЕНИЯ И ОБРАБОТКИ ИЗОБРАЖЕНИЙ И СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2019 |
|
RU2728949C1 |
| Устройство для отображения информации на экране цветного телевизионного индикатора | 1988 |
|
SU1529281A1 |
| Способ динамической юстировки систем координат вертолета на основе их векторного согласования | 2023 |
|
RU2795354C1 |
| Устройство для регистрации значений контролируемых параметров | 1987 |
|
SU1509594A1 |
| КАРТРИДЖ СИСТЕМЫ ВВОДА ВНУТРИГЛАЗНОЙ ЛИНЗЫ | 2009 |
|
RU2470612C2 |
| ДАТЧИК ДЛЯ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ЗАРЯДА ДВИЖУЩИХСЯ ЧАСТИЦ МИНЕРАЛОВ (ВАРИАНТЫ) | 2009 |
|
RU2401427C1 |
| Способ формирования фигур конического сечения на экране электронно-лучевой трубки и устройство для его осуществления | 1976 |
|
SU691897A1 |
| Устройство для отображения информации | 1987 |
|
SU1513439A1 |
| УСТРОЙСТВО ДЛЯ КАДРИРОВАНИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ ПРИ ОТОБРАЖЕНИИ ГРАФИЧЕСКОЙ ИНФОРМАЦИИ | 1994 |
|
RU2054713C1 |

Изобретение относится к контрольно-измерительной технике и может быть использовано в системах управления объектами с непрерывными многопараметрическими технологическими процессами в энергетической, химической, металлургической и других отраслях промышленности. Сущность способа заключается в построении на экране средства отображения информации по совокупности контролируемых параметров топологического образа объекта в реальном масштабе времени в виде кривой второго порядка, позволяющей своевременно обнаруживать аварийные ситуации и нарушения в работе объекта. Сущность устройства заключается в использовании аналоговых вычислительных устройств для формирования и отображения на экране осциллографа топологических образов динамических объектов по совокупности контролируемых параметров. 2 с.п. ф-лы, 3 ил.
AX2 + 2 BXY + CY2 + 2DX + 2 EY + G 0,
в котором коэффициенты A, B, C, D, E и G соответствуют значениям контролируемых сигналов объекта.
| Устройство для отображения информации на экране электроннолучевой трубки | 1976 |
|
SU792244A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
