Изобретение относится к регистрадни контролируемых параметров самопишущими приборами и может быть использовано в системах отображения информации о ходе технологического процесса для записи на диаграммной ленте совокупности взаимосвязанных параметров в виде одной обобщенной кривой, развернутой по горизонтальной оси. координат (оси развертки).
Цель изобретения - расширение функциональных возможностей устройства за счет автоматического выбора и регистрации из множества групп взаимосвязанных параметров такой группы, параметры которой отображают наиболее существенные в данньм момент времени изменения в состоянии объекта контроля.
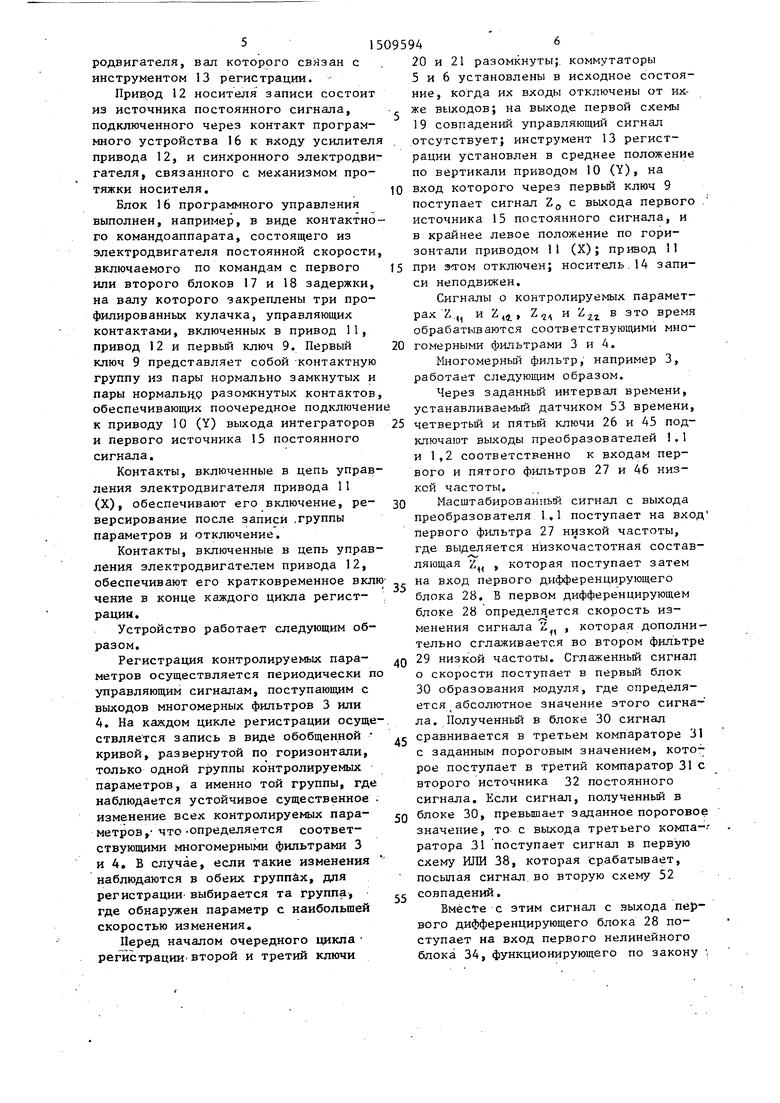
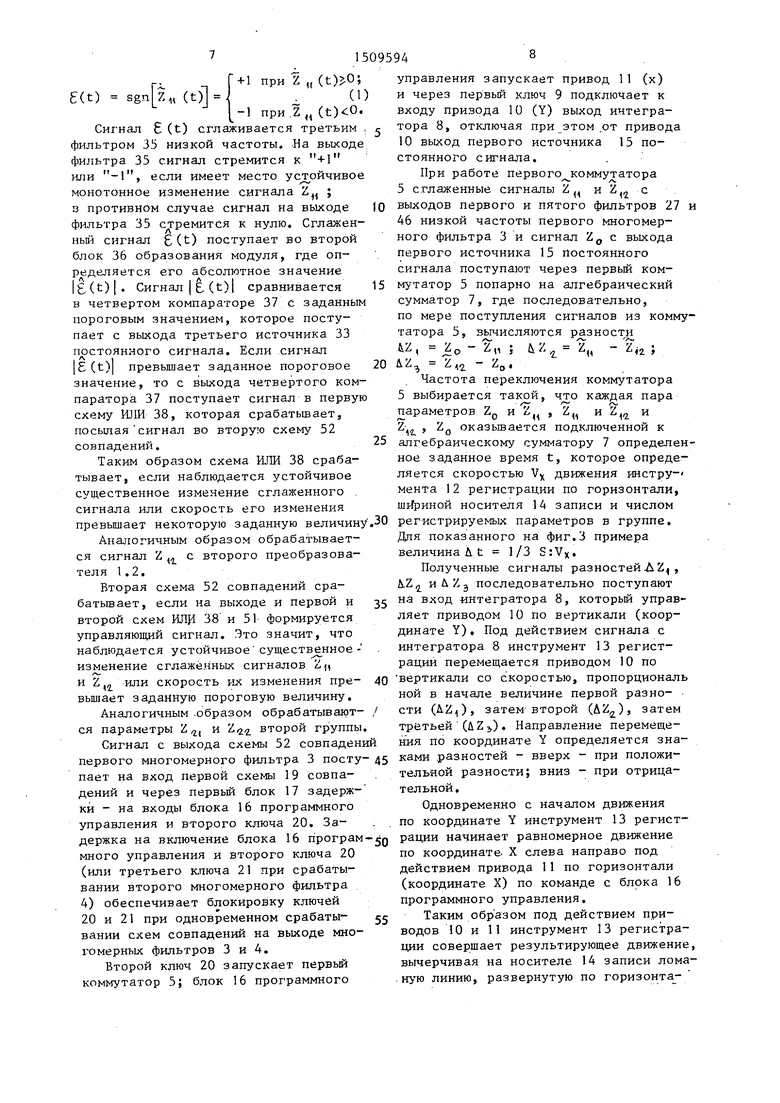
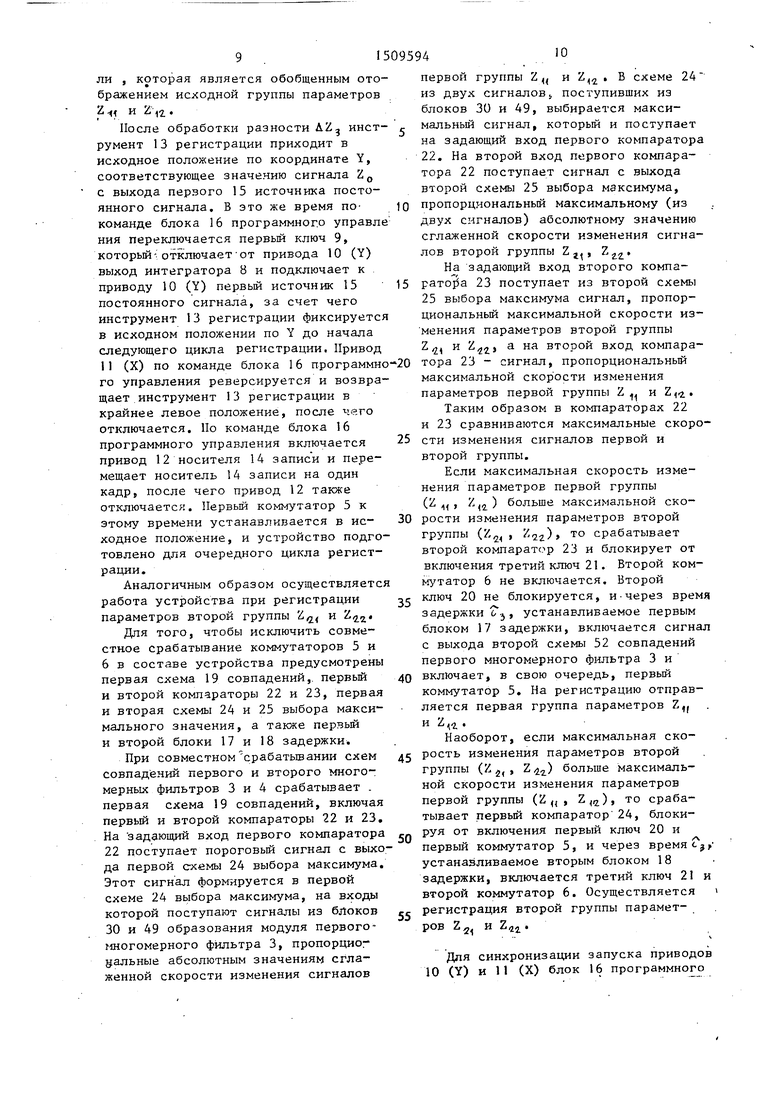
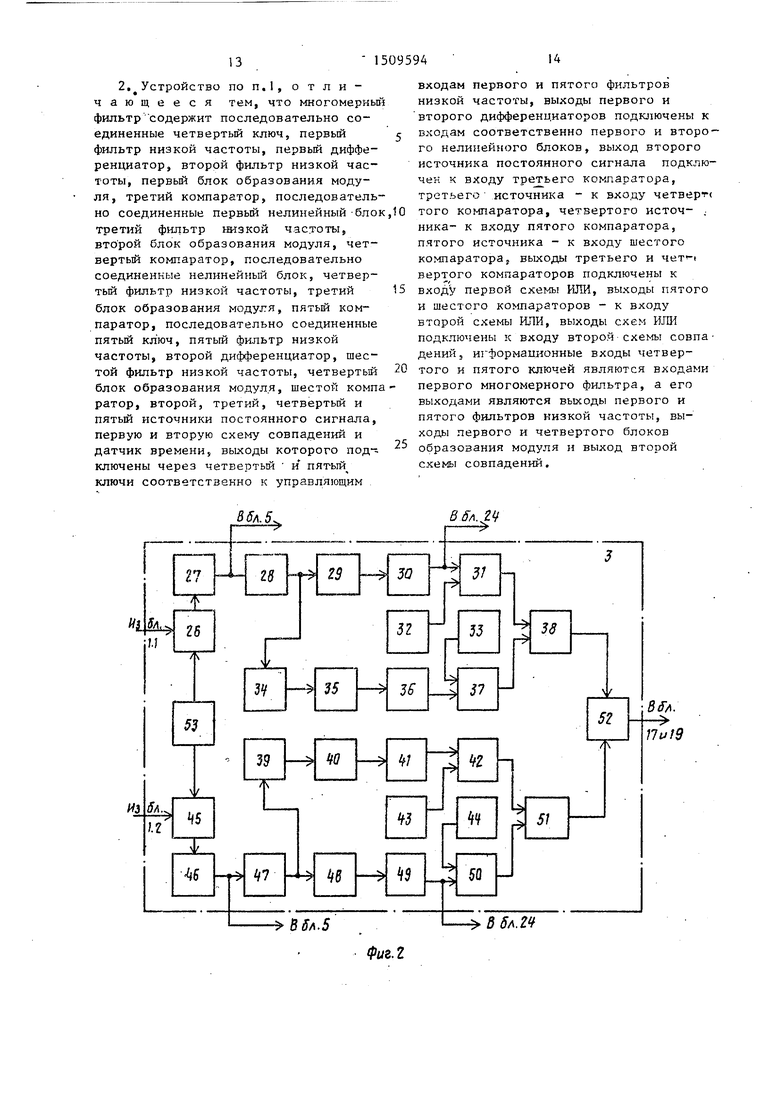
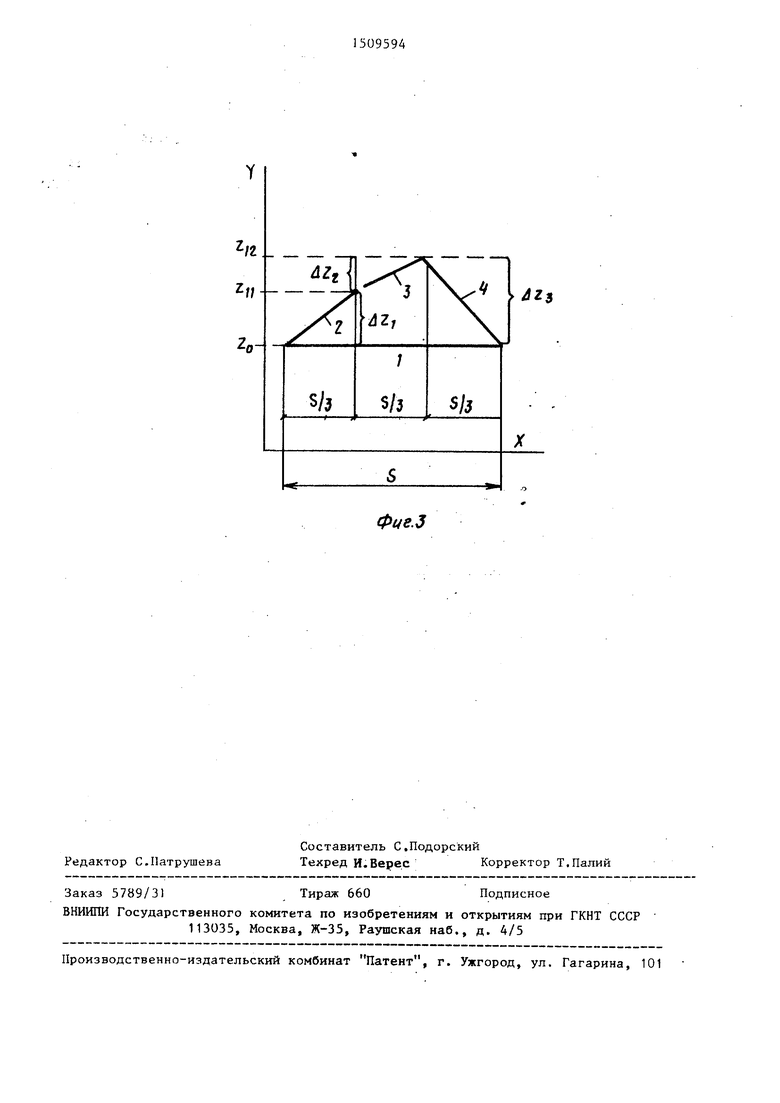
На фиг.1 представлена структурная схема устройства для регистрации двух групп параметров, каждая из которых-образуется двумя параметрами на фиг.2 - структурная схема одного из многомерных фильтров, например первого; на фиг.-З - схема регистрации двух параметров в виде обобщенно кривой, развернутой вдоль горизонтальной координаты X.
Аналогичным образом может быть выполнено устройство для регистрации большего числа групп и большего числа параметров.
На чертежах обозначено: Z,, , Z и Z, , L - значения контролируемых параметров первой и второй группы; ZQ - опорньм сигнал от первого источника постоянного сигнала; UZ
2;o-z,,, -Z
(2
; AZ
Z,2 - где Z,, , сглаженные
S - ширина рабочей
сигналы Z „ и
42
Привод 10 (Y) состоит из мостовой из-мерительной схемы с уравновешивающим реохордом,источника.питания.
зоны носителя записи; 1 - линия опорного уровня, соответствующая сигналу 2,3,4 - линии развертки разностей дз усилителя и реверсивного электродвигателя, вал которого связан с движком
&Z,,&Z2 , соответственно.
Устройство для регистрации значений контролируемых параметров содержит преобразователи l.l 1.2 и 2,1, 2,2 сигнапов от датчиков контролируемых параметров, первьй и второй многомерные фильтры 3 и 4, первьй и второй коммутаторы 5 и 6, алгебраический сумматор 7, интегратор 8, первьй ключ 9, привод 1в инструмента регист- рации по вертикали (привод Y), привод 11 инструмента регистрации по горизонтали (привод X), привод 12 носи-| теля записи, инструмент 13 регистрации
компенсирующего реохорда и инструментом регистрации. Вход измерительной схемы через первьй ключ 9 может подключаться по команде блока 14 программного управления или к выходу первого источника 15 постоянного сигнала, или к выходу интегратора 8,
Привод 11 (X) состоит из источника постоянного сигнала, подключенного через контакты блока 16 програм- bffloro управления к входу усилителя привода 11 (X), и реверсивного элект
в виде, например, каретки с пером и показывающим индексом, носитель 14 записи в виде, например, диаграммной ленты, первый источник 1 5 постоянного сигнала, блок 16 программного управления, первьм и второй блоки 17 и 18 задержки, первую схему 19 совпадений, второй и трети ключи 20 и 21, первый и второй компараторы 22 и 23, первую и вторую схему 24 и 25 выбора максимального значения.
Многомерньм фильтр, напрш- ер 3, содержит четвертый ключ 26, первый
фильтр 27 низкой частоты, первый дифференциатор 28, второй фильтр 29 низкой частоты, первый блок 30 образования модуля, третий компаратор 31J второй и третий источники 32 н 33 постоянного сигнала, первый нелинейный элемент 34, третий фильтр 35 низкой частоты, второй блок 36 образования модуля, четвертый компаратор 37, первую схему ИЛИ 38, втор.ой нелинейньй блок 39, четвертый фильтр 40 низкой частоты, третий блок 41 образования модуля, пятый компаратор 42, четвертьй и пятьй источники 43 и 44 постоянного сигнала, пятьй ключ
45, пятьй фильтр 46 низкой частоты, второй дифференциатор 47, шестой С фильтр 48 низкой частоты, четвертый блок 49 образования модуля, шестой компаратор 50, вторую схему ИЛИ 51,
вторую схему 52 совпадений, датчик 53 времени.
Реализация блоков осуществлена следующим образом.
Преобразователи 1.1, 1.2 и 2.1,
2.2 сигналов выполнены, например, в виде делителей напряжения.
Привод 10 (Y) состоит из мостовой из-мерительной схемы с уравновешивающим реохордом,источника.питания.
усилителя и реверсивного электродвигателя, вал которого связан с движком
компенсирующего реохорда и инструментом регистрации. Вход измерительной схемы через первьй ключ 9 может подключаться по команде блока 14 программного управления или к выходу первого источника 15 постоянного сигнала, или к выходу интегратора 8,
Привод 11 (X) состоит из источника постоянного сигнала, подключенного через контакты блока 16 програм- bffloro управления к входу усилителя привода 11 (X), и реверсивного электродвигателя, вал которого связан с инструментом 13 регистрации.
Привод 12 носителя записи состоит из источника постоянного сигнала, подключенного через контакт программного устройства 16 к входу усилител привода 12, и синхронного электродвигателя, связанного с механизмом протяжки носителя.
БЛОК 16 программного управления выполнен, например, в виде контактного командоаппарата, состоящего из электродвигателя постоянной скорости включаемого по командам с первого или второго блоков 17 и 18 задержки, на валу которого закреплены три профилированных кулачка, управляющих контактами, включенных в привод 11, привод 12 и первый ключ 9. Первый ключ 9 представляет собой контактную группу из пары нормально замкнутых и пары нормально разомкнутых контактов обеспечивающих поочередное подключени к приводу 10 (Y) выхода интеграторов и первого источника 15 постоянного сигнала.
Контакты, включенные в цепь управления электродвигателя привода 11 (X), обеспечивают его включение, реверсирование после записи .группы параметров и отключение.
Контакты, включенные в цепь управления электродвигателем привода 12, обеспечивают его кратковременное включение в конце каждого цикла регистрации.
Устройство работает следующим образом.
Регистрация контролируемых параметров осуществляется периодически по управляющим сигналам, поступающим с выходов многомерных фильтров 3 или 4. На каждом цикле регистрации осуществляется запись в виде обобщенной кривой, развернутой по горизонтали, только одной группы контролируемых параметров, а именно той группы, где наблюдается устойчивое существенное - изменение всех контролируемых параметров - что -определяется соответствующими многомерными фильтрами 3 и 4, В случае, если такие изменения наблюдаются в обеих группах, для регистрации выбирается та группа, где обнаружен параметр с наибольшей скоростью изменения.
Перед началом очередного цикла - регистрации второй и третий ключи
я 15095946
20 и 21 разомкнуты;, коммутаторы 5 и 6 установлены в исходное состояние, когда их входы отключены от их- же выходов; на выходе первой схемы 19 совпадений управляющий сигнал отсутствует; инструмент 13 регистрации установлен в среднее положение по вертикали приводом 10 (Y), на Q вход которого через первый ключ 9
поступает сигнал Z с выхода первого источника 15 постоянного сигнала, и в крайнее левое положение по горизонтали приводом 11 (X); привод 11 при э-том отключен; носитель. 14 записи неподвижен.
Сигналы о контролируемых парамет0
0
pax Z.,, и Z,,j, , и в это время обрабатываются соответствующими многомерными фильтрами 3 и 4,
Многомерный фильтр, например 3, работает следующим образом.
Через заданный интервал времени, устанавливаемьй датчиком 53 времени, 5 четвертьй и пятый ключи 26 и 45 подключают выходы преобразователей 1.1 и 1,2 соответственно к входам первого и пятого фильтров 27 и 46 низкой частоты.
Масштабированный сигнал с выхода преобразователя 1.1 поступает на вход первого фильтра 27 низкой частоты, где выделяется низкочастотная составляющая i , , которая поступает затем на вход первого дифференцирующего блока 28, В первом дифференцирующем блоке 28 определя.ется скорость изменения сигнала Z, , которая дополнительно сглаживается во втором фильтре
29низкой частоты. Сглаженный сигнал о скорости поступает в первый блок
30образования модуля, где определяется абсолютное значение этого сигна- ла. Полученный в блоке 30 сигнал
с сравнивается в третьем компараторе 31 с заданным пороговым значением, которое поступает в третий компаратор 31 с второго источника 32 постоянного сигнала. Если сигнал, полученньй в
0 блоке 30, превышает заданное пороговое значение, то с выхода третьего компа-- ратора 31 поступает сигнал в первую схему ИЛИ 38, которая срабатывает,
посылая сигнал во вторую схему 52
е совпадений,
Вместе с этим сигнал с выхода первого дифференцирующего блока 28 поступает на вход первого нелинейного блока 34, функционирующего по закону
5
0
г- п
(t) ,, (t)
1509594
+ 1 при Z „ (t)0; (1)
1 при.г,, (t)o
управления запускает привод 11 (х) и через первый ключ 9 подключает к входу привода 10 (Y) выход интеграСигнал (t) сглаживается третьим , тора 8, отключая при этом .от привода
фильтром 35 низкой частоты. -На выходе фильтра 35 сигнал стремится к +1 или -1, если имеет место устойчивое монотонное изменение сигнала Z.
41 в противном случае сигнал на выходе
фильтра 35 стремится к нулю. Сглаженный сигнал 5(t) поступает во второй блок 36 образования модуля, где определяется его абсолютное значение |(t)|. Сигнал I (t)| сравнивается в четвертом компараторе 37 с заданным пороговым значением, которое поступает с выхода третьего источника 33 постоянного сигнала. Если сигнал |(t) превышает заданное пороговое значение, то с выхода четвертого компаратора 37 поступает сигнал в первую схему ИЛИ 38, которая срабатывает, посылая сигнал во вторую схему 52 совпадений.
Таким образом схема ИЛИ 38 срабатывает, если наблюдается устойчивое существенное изменение сглаженного . сигнала или скорость его изменения
10
10 выход первого источника 15 постоянного сигнала.
При работе первого коммутатора 5 сглаженные сигналы Z,, и Z, с
выходов первого и пятого фильтров 27 46 низкой частоты первого многомерного фильтра 3 и сигнал Z,, с выхода первого источника 15 постоянного сигнала поступают через первый ком- 15 мутатор 5 попарно на алгебраический сумматор 7, где последовательно, по мере поступления сигналов из комму татора 5, вычисляются разности tZ, Zo - Z,, ; tiZ Z,, - z ,2 ;
20 &Z Z,,2
- Z
Частота переключения коммутатора 5 выбирается такой, что каждая пара параметров Z и Z, , z,, и Ъ и Z-, , ZQ оказьшается подключенной к 25 алгебраическому сумматору 7 определен ное заданное время t, которое определяется скоростью Vy движения инстру- мента 12 регистрации по горизонтали, шириной носителя 14 записи и числом
превышает некоторую заданную величину .ЗО регистрируемых параметров в группе.
Аналогичным образом обрабатывается сигнал Z , с второго преобразователя 1,2,
Вторая схема 52 совпадений срабатывает, если на выходе и первой и второй схем ИЛИ 38 и 51 формируется управляющий сигнал. Это значит, что наблюдается устойчивое существенное- изменение сглаженных сигналов L
8
управления запускает привод 11 (х) и через первый ключ 9 подключает к входу привода 10 (Y) выход интегратора 8, отключая при этом .от привода
10 выход первого источника 15 постоянного сигнала.
При работе первого коммутатора 5 сглаженные сигналы Z,, и Z, с
выходов первого и пятого фильтров 27 и 46 низкой частоты первого многомерного фильтра 3 и сигнал Z,, с выхода первого источника 15 постоянного сигнала поступают через первый ком- мутатор 5 попарно на алгебраический сумматор 7, где последовательно, по мере поступления сигналов из коммутатора 5, вычисляются разности tZ, Zo - Z,, ; tiZ Z,, - z ,2 ;
&Z Z,,2
- Z
Частота переключения коммутатора 5 выбирается такой, что каждая пара параметров Z и Z, , z,, и Ъ и Z-, , ZQ оказьшается подключенной к алгебраическому сумматору 7 определенное заданное время t, которое определяется скоростью Vy движения инстру- мента 12 регистрации по горизонтали, шириной носителя 14 записи и числом
Для показанного на фиг,3 примера величина Аt 1/3 S:Vx.
Полученные сигналы разностей ЛZ, 1Л HAZg последовательно поступают на вход интегратора 8, который управляет приводом 10 по вертикали (координате Y), Под действием сигнала с интегратора 8 инструмент 13 регистрации перемещается приводом 10 по
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прогнозирования состояния системы управления | 1978 |
|
SU742710A1 |
| Система оптимизации режимов работы объекта | 1989 |
|
SU1636831A1 |
| Устройство для редактирования | 1982 |
|
SU1117669A1 |
| УСТРОЙСТВО ДДЯ ОБНАРУЖЕНИЯ И ВЫДЕЛЕНИЯ СЕЙСМИЧЕСКИХ СИГНАЛОВ P- И S-ВОЛН ПО ИЗВЕСТНОМУ НАПРАВЛЕНИЮ НА ИСТОЧНИК | 1993 |
|
RU2050010C1 |
| СПОСОБ РЕГИСТРАЦИИ СОСТОЯНИЯ ПАРАМЕТРОВ КОНТЕЙНЕРА ПО ПУТИ ЕГО СЛЕДОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325621C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Устройство для контроля параметров | 1986 |
|
SU1403074A1 |
| Устройство для регистрации параметров двухполюсников | 1981 |
|
SU945829A1 |
| Устройство для контроля металлизированных переходов печатной платы | 1985 |
|
SU1308955A1 |
| Третьоктавный спектральный анализатор | 1985 |
|
SU1308927A1 |
Изобретение может быть использовано в системах отображения информации о ходе технологического процесса для записи на диаграммной ленте совокупности взаимосвязанных параметров в виде одной обобщенной кривой, развернутой по горизонтальной оси координат. Изобретение позволяет расширить функциональные возможности устройства за счет автоматического выбора и регистрации из множества групп взаимосвязанных параметров такой группы, параметры которой отображают наиболее существенные в данный момент времени изменения в состоянии объекта контроля. Устройство содержит преобразователи 1.1, 1.2 и 2.1, 2.2 сигналов от датчиков контролируемых параметров, первый и второй многомерные фильтры 3 и 4, первый и второй коммутаторы 5 и 6, алгебраический сумматор 7, интегратор 8, первый ключ 9, привод 10 инструмента регистрации по вертикали, привод 11 инструмента регистрации по горизонтали, привод 12 носителя записи, инструмент 13 регистрации в виде каретки с пером и показывающим индексом, носитель 14 записи, первый источник 15 постоянного сигнала, блок 16 программного управления, первый и второй блоки 17 и 18 задержки, первую схему 19 совпадений, второй и третий ключи 20 и 21, первый и второй компараторы 22 и 23, первую и вторую схему 24 и 25 выбора максимального значения. 1 з.п. ф-лы, 3 ил.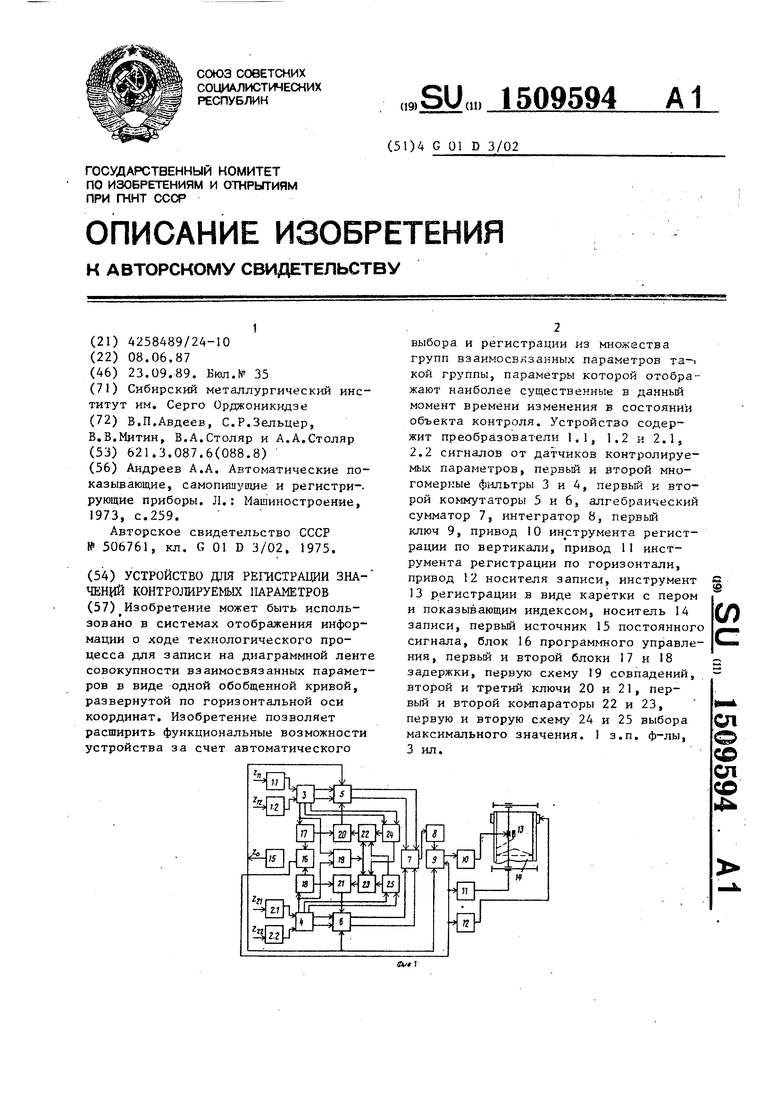
и Z,2 или скорость их изменения пре- 40 вертикали со скоростью, пропорциональ
вышает заданную пороговую величину,ной в начале величине первой разно-
Аналогичным .образом обрабатывают- /сти (AZ), затем второй (AZ,), затем
ся параметры Z , и Z второй группы,третьей (иZj). Направление перемещеСигнал с выхода схемы 52 совпаденийния по координате Y определяется знапервого многомерного фильтра 3 посту- ДЗками разностей - вверх - при положипает на вход первой схемы 19 совпа- .тельной разности; вниз - при отрицадений и через первьй блок 17 задерж- тельной,
кй - на входы блока 16 программного Одновременно с началом движения управления и второго ключа 20, За- . . по координате Y инструмент 13 регистдержка на включение блока 16 програм-5орации начинает равномерное движение
много управления и второго ключа 20 (или третьего юпюча 21 при срабатывании второго многомерного фильтра 4) обеспечивает блокировку ключей 20 и 21 при одновременном срабатывании схем совпадений на выходе многомерных фильтров 3 и 4.
Второй ключ 20 запускает первьй коммутатор 5; блок 16 программного
по координате X слева направо под действием привода 11 по горизонтали (координате X) по команде с блока 16 программного управления, 55 Таким обр азом под действием приводов 10 и 11 инструмент 13 регистрации совершает результирующее движение, вычерчивая на носителе 14 записи ломаную линию, развернутую по горизонтарации начинает равномерное движение
по координате X слева направо под действием привода 11 по горизонтали (координате X) по команде с блока 16 программного управления, Таким обр азом под действием приводов 10 и 11 инструмент 13 регистрации совершает результирующее движение, вычерчивая на носителе 14 записи ломаную линию, развернутую по горизонтали , которая является обобщенным отображением исходной группы параметров 2 1
После обработки разности AZ. инст- румент 13 регистрации приходит в исходное положение по координате Y, соответствующее значению сигнала Z с выхода первого 15 источника постоянного сигнала. В это же время по- команде блока 16 программного управле ния переключается первый ключ 9, который-; отключает-от привода 10 (Y) выход интегратора 8 и подключает к приводу 10 (Y) первьй источник 15 постоянного сигнала, за счет чего инструмент 13 регистрации фиксируется в исходном положении по Y до начала следующего цикла регистрации. Привод 11 (X) по команде блока 16 программно го управления реверсируется и возвращает инструмент 13 регистрации в крайнее левое положение, после чего отключается. По команде блока 16
программного управления включается
привод 12 носителя 14 записи и перемещает носитель 14 записи на один кадр, после чего привод 12 также отключается. Первый коммутатор 5 к этому времени устанавливается в ис- ходное положение, и устройство подготовлено для очередного цикла регистрации.
Аналогичным образом осуществляетс работа устройства при регистрации параметров второй группы и Z
Для того, чтобы исключить совместное срабатывание коммутаторов 5 и 6 в составе устройства предусмотрены первая схема 19 совпадений,, первьй и второй компараторы 22 и 23, первая и вторая схемы 24 и 25 выбора максимального значения, а также первьй и второй блоки 17 и 18 задержки.
При совместном срабатьшании схем совпадений первого и второго многомерных фильтров 3 и 4 срабатывает . первая схема 19 совпадений, включая первый и второй компараторы 22 и 23, На задающий вход первого компаратора 22 поступает пороговьй сигнал с выхода первой схемы 24 выбора максимума. Этот сигнал формируется в первой схеме 24 вь.1бора максимума, на входы которой поступают сигналы из блоков 30 и 49 образования модуля первого- шoгoмepнoгo фильтра 3, пропорциог дальные абсолютным значениям сглаженной скорости изменения сигналов
г 5 0
5
0
5
0
5 Q е
первой группы Z и . В схеме 24 из двух сигналов 5 посгупивщих из блоков 30 и 49, выбирается макси- мальньй сигнал, которьй и поступает на задающий вход первого компаратора 22. На второй вход первого компаратора 22 поступает сигнал с выхода второй схемы 25 выбора максимума, пропорциональный максимальному (из двух сигналов) абсолютному значению сглаженной скорости изменения сигналов второй группы Z j, Z,
На задающий вход второго компаратора 23 поступает из второй схемы 25 выбора максимума сигнал, пропор- циональньй максимальной скорости из- менения параметров второй группы Z и I второй вход компаратора 23 - сигнал, пропорциональньй максимальной скор ости изменения параметров первой группы Z ,. и Z..
Таким образом в компараторах 22 и 23 сравниваются максимальные скорости изменения сигналов первой и второй группы.
Если максимальная скорость изменения параметров первой группы (Z , , Z,2.) больше максимальной скорости изменения параметров второй группы (Z , Z) то срабатывает второй компаратор 23 и блокирует от включения третий ключ 21. Второй коммутатор 6 не включается. Второй ключ 20 не блокируется, и-через время задержки сГ устанавливаемое первым блоком Г/ задержки, включается сигнал с выхода второй схемы 52 совпадений первого многомерного фильтра 3 и включает, в свою очередь, первьй коммутатор 5. На регистрацию отправляется первая группа параметров Z,( и Z,.
Наоборот, если максимальная скорость изменения параметров второй группы (Zj, , Z) больше максимальной скорости изменения параметров первой группы (Z ,{ , Z,j), то срабатывает первьй компаратор 24, блокируя от включения первый ключ 20 и первый коммутатор 5, и через времяtj/ устанавливаемое вторым блоком 18 задержки, включается третий ключ 21 и второй коммутатор 6. Осуществляется регистрация второй группы параметров Z, и Z;21
Для синхронизации запуска приводов 10 (Y) и 11 (X) блок 16 программного
у11равления также включается через время задержки о.,
Таким образом, при одновременном существенном устойчивом изменении параметров первой и второй групп для регистрации выбирается та из них в которой зафиксирован параметр с максимальной скоростью изменения.
Аналогичным образом может быть осуществлена регистрация большего числа групп параметров и большего числа параметров в группах.
Изобретение позволяет расширить функциональные возможности устрой- ства для регистрации значений- контролируемых параметров за счет автоматического (с помощью многомерных .фильтров) выявления согласованных тенденций в группах взаимосвязанных параметров. Кроме того повьш1ается надежность обнаружения предаварий- ных и аварийных событий за счет опе- ративног.о анализа скоростей изменени контролируемых параметров, уменьша- ется число ошибок при оценке состояния многомерных объектов, характеризуемых большим числом взаимосвязанны контролируемых параметров.
Применение: предлагаемого устрой- ства в системах отображения информации многомерных объектов, например доменных печей, позволяет повысить эффективность использования информации оператором-технологом и, как следствие, качество управления объек том в целом.
Формула и.30 бре.тения
1, Устройство для регистрации значений контролируе мых параметров, содержащее привод инструмента регистрации по горизонтали, первьй, второй, третий и четвертьй преобразо- ватели сигналов, первый источник постоянного сигнала, интегратор, привод инструмента регистрации По вертикали, инструмент регистрации, носи- тель записи и блок программного ; управления, отличающееся тем, что, с целью расширения (функциональных возможностей путем обеспече- ния автоматического выбора для регистрации группы параметров, в кото- рой происходит совместное существенное изменение значений или скоростей их изменения, в него дополнительно введены первый и второй многомерные
0
5 0
0 5
0
5 Q 5
фильтры, первый и второй коммутаторы, алгебраический сумматор и первый ключ, первый выход которого соединен с выходом алгебраического сумматора через интегра -ор, последовательно соединенные первая схема выбора максимального значения, первый компаратор и второй ключ, а также последовательно соединенные вторая схема выбора максимального значения, второй компаратор и третий ключ, первьй и второй блоки задержки первая схема совпадений, причем выходы первого и второго преобразователей сигналов подключены соответственно к первому и второму входам первого многомерного фильтра, вычоды третьего и четвертого преобразователей сигнфюв подключены соответственно к первому и второму входам второго многомерного фильтра, первый и второй выходы первого многомерного . фильтра подключены.к первому и второму входам первого коммутатора, третий и четвертьй выходы первого многомерного фильтра подключены к первому и второму входам первой схемы выбора максимального значения, а пятьй выход - к входу первого блoka задержки и первому входу nepBotf схемы совпадения, третий и четвертьй выходы второго многомерного фильтра подключены к первому и второму входам второго коммутатора, а Пятьй выход соединен т с входом, второго блока задержки и вторым входом первой схемы совпаде- ния, выход первой схемы совпадения подключен к вторым входам первого и второго компаратора, третий вход . первого компаратора соединён с вторым выходом второй схемы выбора макси- . мального значения, а третий вход второго компаратора соединен с вторым выходом первой схемы выбора максимального значения, первьй и второй выходы первого и второго коммутаторов соединены соответственно с первым, вторым, третьим и четвертым входами алгебраического сумматора, выход первого источника постоянного сигнала соединен с третьими входами первого и второго коммутаторов и вторым вхог дом первого ключа, выход которого подключен к входу привода инструмента регистрации по вертикали, выход блока программного управления соединен с : третьим входом первого ключа, входом привода инструмента регист)ации по горизонтали и входом привода носителя.
2,Устройство по п.I, отличающееся тем, что MHoroMepHbD фильтр содержит последовательно соединенные четвертый ключ, первый фильтр низкой частоты, первый дифференциатор, второй фильтр низкой частоты, первьй блок образования модуля, третий компаратор, последовательно соединенные первый нелинейный-бло третий фильтр ьшзкой частоты, второй блок образования модуля, чет- вертьй компаратор, последовательно соединенные нелинейньй блок, четвер- тьй фильтр низкой частоты, третий блок образования модуля, пятьй компаратор, последовательно соединенные пятьй ключ, пятый фильтр низкой частоты, второй дифференциатор, шестой фильтр низкой частоты, четвертьй блок образования модуля, шестой компратор, второй, третий, четвертьй и пятьй источники постоянного сигнала, первую и вторую cxehiy совпадений и датчик времени, выходы которого под-s ключены через четвертьй и пягый ключи соответственно к управляющим ,
В 5л. 5.
входам первого и пятого фильтров низкой частоты, выходы первого и второго дифференциаторов подключены к входам соответственно первого и второго нелинейного блоков, выход второго источника постоянного сигнала подключен к входу третьего компаратора, третьего источника - к входу четверт того компаратора, четвертого источ- .. ника- к входу пятого компаратора, пятого источника - к входу шестого компаратора, выходы третьего и вертого компараторов подключены к входУ первой схемы ИЛИ, выходы пятого и шестого компараторов - к входу второй схемы ИЛИ, выходы схем ИЛИ подклю чены к входу второй схемы совпадений, игформационные входы четвертого и пятого ключей являются входами первого многомерного фильтра, а его выходами являются выходы первого и пятого фильтров низкой частоты, выходы первого и четвертого блоков образования модуля и выход второй схемы совпадений.
В 5л. 2
Агъ
фце.З
| Андреев А.А | |||
| Автоматические показывающие, самопишуище и регистри- | |||
| рующие приборы | |||
| Л.: Машиностроение, 1973, с.259 | |||
| Двухкоординатное регистрирующее устройство | 1973 |
|
SU506761A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
