Изобретение относится к области построения и обработки первичного RAW изображения в цифровую форму (формат сжатия), полностью адаптированную по всем классам обработки: хранение и преобразование (сжатие с потерями, групповое сжатие, редактирование); анализ (распознавание, фильтрация); синтез (аппроксимация, векторизация), в форматах статичных изображений с потерями, а также любых подвижных изображений, что реализуется в виде базового устройства создания сквозного формата представления и обработки цифровых изображений в любом диапазоне сигналов в зависимости от существующих средств сканирования. Для обоснования технических решений, принятых при решении данных задач, рассмотрим кратко теоретические основы уровня техники для построения и обработки изображения.
Уровень техники
В настоящее время при формировании модели изображения широко используют математическую классическую нормальную линейную регрессионную модель Гаусса-Маркова со структурой данных с BLUE-оценками (best linear unbiased estimates) (состоятельные, несмещенные и эффективные оценки) и с аддитивной моделью визуального шума, сопровождающего формирование изображений. Данная модель хорошо описывает действие зернистости фотопленки, флуктуационный шум в радиотехнических системах, шум квантования в аналого-цифровых преобразователях и т.п.. Известно много методов обработки изображений, сводящихся к подавлению шума и значительно улучшающих их качество, но при подавлении шума происходит потеря или искажение данных. Это приводит к потере разрешающей способности1 (1 Разрешающая способность матрицы цифровой фотокамеры - способность устройства передавать мелкие детали изображения детализацию изображения. Разрешающая способность графического изображения определяется количеством пикселей по горизонтали, так и по вертикали на единицу длины (дюйм) изображения. Чем меньше размер точки, тем больше разрешающая способность (больше строк растра и точек в строке) и, соответственно, выше качество изображения. Величина разрешающей способности обычно выражается в dpi (dot per inch - точек на дюйм), т.е. в количестве точек в полоске изображения длиной один дюйм (1 дюйм = 2,54 см) (потере мелких деталей изображения) и ухудшает степень их детальности.
Алгоритмы подавления шума в изображениях, реализуемые на вычислительных устройствах, требуют формировать способ оптимального сканирования двумерного изображения, поскольку алгоритм есть по определению последовательность некоторых шагов с линейно адресуемой памятью ЭВМ, а также в силу последовательного способа передачи сообщений и организации хранения таких данных в памяти ЭВМ для выполнения преобразований над элементами массивов. Данное требование определяет необходимость решения задачи В.В. Александрова [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985. 102 с.], заключающейся в следующем: для заданного класса изображений найти представления двумерного массива R2 в виде линейно-упорядоченной последовательности элементов R1, учитывающей многомерную связанность элементов топологии многомерного пространства изображения и линейность архитектуры ЭВМ. При этом следует иметь в виду затраты на решение задачи растут экспоненциально с ростом размерности.
I. Формирование сканирования (развертки). При сканировании изображения информацию обо всех переменных состояния можно представить эквивалентным одномерным временным рядом в m - мерном фазовом пространстве по методу временных задержек по теореме Такенса [Takens F. Detecting Strange At-tractors in Turbulence. - Berlin, Springer, 1981. - P. 366-381]

где m - размерность вложения, τ - временная задержка.
При этом данный временной ряд xi(t), где t=i τ представляет собой совокупность наблюдений {xi}=[x1, x2, …, xN], проведенное через дискретный временной интервал τ. Интервал τ может быть постоянным и требует равномерной шкалы наблюдений. И наоборот, взаимодействия состояний и их количество в фазовой траектории, сохраняющая структуры оригинальной фазовой траектории, восстанавливается из временного ряда, вложенного в псевдофазовое пространство заданной размерности m:

В 1987 г. Экман (Eckmann) и соавторы [Eckmann J. - P., Kamphorst S.O., Ruel-le D. Recurrence Plots of Dynamical Systems//Europhysics Letters. 1987. 5. P. 973-977] предложили способ отображения траектории  в m - мерной фазовой траектории состояний системы x(t) длиной N на двумерную квадратную двоичную матрицу размером m×m, в которой единица (черная точка) соответствует повторению состояния при некотором времени i в некоторое другое время j, а обе координатные оси являются осями времени (рекуррентная диаграмма (recurrence plot, RP)) для фиксации информации о рекуррентном поведении системы.
в m - мерной фазовой траектории состояний системы x(t) длиной N на двумерную квадратную двоичную матрицу размером m×m, в которой единица (черная точка) соответствует повторению состояния при некотором времени i в некоторое другое время j, а обе координатные оси являются осями времени (рекуррентная диаграмма (recurrence plot, RP)) для фиксации информации о рекуррентном поведении системы.
Таким образом, возникает задача выбора вида сканирования двумерного массива в одномерный и задания порядка на множестве элементов одномерного массива данных. Выбор вида сканирования определяется компромиссом между эффективностью сохранения взаимной топологической близости элементов исходного и развернутого пространств, свойство квазинепрерывности и сохранение корреляционных связей между элементами в том и другом пространствах, а также простотою алгоритма сканирования.
В настоящее время общепринятым методом двумерного сканирования является построчное (поколонное) сканирование информационного поля, называемое также телевизионным сканированием. В данном сканировании разрываются структурные связи, существующие между блоками исходного изображения. Этот подход основан на отказе от строчного сканирования цифрового изображения и замене ее сканированием более сложного вида. В [Алатар А.И., Михайлов А.А. Алгоритмы сканирования (развертки) информационных систем восстановления динамических изображений//Известия Тульского государственного университета. Технические науки. - 2018. Вып. 10. - С. 399-411] приведены основные типы сканирования простейшее линейное сканирование по строкам (столбцам), а также спиральное сканирование, рекурсивное сканирование (сканирование Гильберта).
В эффективном способе упорядочения элементов массива используется алгоритм, который обходит последовательно пиксели, группируя их [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985. 102 с.; Sagan Н. Space-Filling Curves/H. Sagan. - New York: Springer-Verlag. 1994. 208p] и формируя одномерную последовательность, которую удобно хранить и передавать по каналам связи для выделения отдельных объектов (т.к. точки ему принадлежащие, сгруппированы). В настоящее время широко используется строчное сканирование изображения с помощью самоподобных отображений по правилам Кривой Заполняющей Плоскость (КЗП). Отображение изображения через самоподобные квадраты, со стороной размером 3p, где р - степень сходимости, р=0…10 в память процессора выполняется по правилам КЗП или отрезками длиной 9p. Предлагаемое сканирование элементов (пикселей) изображения позволяет (за счет организации памяти и сверх параллельного доступа) в десятки раз увеличить скорость обработки изображения по всем его классам процедур. Такая КЗП, в отличие от других, проработана вплоть до ее аппаратной реализации [Уоррен Г., мл. Алгоритмические трюки для программистов. "Вильямс", Москва, 2004. 288 с. стр. 233]. Однако, такие методы недостаточно эффективны, так как не учитывают характерные особенности изображений как объектов обработки: двумерный характер статистических связей, наличие однородных областей, контуров и т.п. Учет указанной специфики позволяет повысить качество обработки, но приводит к усложнению соответствующих алгоритмов. Причем возможно учесть особенности изображений не на этапе обработки данных, а на этапе их формирования.
II. Выбор и обоснование оптимальности сканирования (развертки) при построении изображения.
К настоящему времени предложено много алгоритмов сканирования, базирующихся на понятии КЗП [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985. 102 с.; Sagan Н. Space-Filling Curves/H. Sagan. - New York: Springer-Verlag. 1994. 208p.; Valantinas J. On the use of space-filling curves in changing image dimensionality/J. Valantinas//Information technology and control. 2005. Vol. 34. №. 4. P. 345-354], которые не учитывают особенности изображений. Данные недостатки известных алгоритмов удаления шума в изображении стимулируют новые подходы к задачам их предварительной обработки, способных сохранять эту важную характеристику алгоритма обработки изображения. Важнейшей характеристикой качества растрового изображения является разрешающая способность, которая определяет пространственную дискретизацию непрерывных изображений, критерием для которой является критерий разрешение - измерение [Ширман Я.Д. Разрешение и сжатие сигналов /Я.Д. Ширман М.: Сов. радио. 1974. 360 с.], учитывающий случайный характер полученного изображения.
Актуальным представляется выбор способа сканирования и соответствующей ему развертки, которые с одной стороны просто реализуются, а с другой приводят к приемлемым потерям информации о свойствах изображения, сопровождающая переход от двумерного изображения к его одномерному вектору данных. Возможность решения данной задачи определяет теорема Такенса [Broer Н. Dynamical Systems and Chaos / H. Broer, F. Takens. New York: Springer. 2011. 313 pp], определяющая переход от двумерного изображения к его одномерному вектору данных с использованием погружения временных рядов в фазовое пространство исходного изображения.
Одним из путей повышения качества изображения при наличии шума, возникающего в процессе его формирования, является увеличение его детализации путем выбора вида сканирования (развертки) двумерного массива в одномерную последовательность, учитывающей многомерную связанность элементов и линейность архитектуры ЭВМ, т.е. оптимизацию алгоритмов сканирования (развертки) погружением в фазовое пространство изображения.
В основу КЗП положено липшицево отображение - отображение ƒ. X→Y между двумя метрическими пространствами, применение которого увеличивает расстояния не более, чем в некоторую константу раз, т.е. отображение ƒ метрического пространства (X, ρХ) в метрическое пространство (Y, ρY) липшицевое, если найдется константа L Гёльдера-Липшица этого отображения (условие Гёльдера-Липшица 

при любых x:, y∈Х.
1. Формирование показателей топологии сканирования. При упорядочении двумерного массива R2 на R1 конкретным сканированием в упорядоченном одномерном множестве определяются подмножества G, состоящие только из элементов двумерной окрестности рассматриваемого элемента, одно из которых включает сам этот элемент. Число элементов этого "одномерного" подмножества G характеризует свойство сохранения конкретной окрестности данного сканирования. При рекурсивном сканировании наименьшей структурной единицей является эталонная ячейка (порождающий элемент) G элементов, число элементов в которой называют окрестностным индексом рассматриваемого элемента (ОИЭ) Jэ [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985. 102 с]. Локальная характеристика Jэ является функцией закона сканирования и местоположения элемента в преобразуемом массиве. Для анализа топологической близости состояния  состоянию
состоянию  квазинепрерывного рекурсивного сканирования Гильберта-Пеано (СГП) [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985. 102 с.] используют рекуррентность сканирования в виде окрестностного индекса элемента (ОИЭ), который определяется как
квазинепрерывного рекурсивного сканирования Гильберта-Пеано (СГП) [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985. 102 с.] используют рекуррентность сканирования в виде окрестностного индекса элемента (ОИЭ), который определяется как

где  , i,j=1…N, N - количество рассматриваемых состояний xi, εi - размер окрестности точки
, i,j=1…N, N - количество рассматриваемых состояний xi, εi - размер окрестности точки  в момент i,
в момент i,  норма и Θ(⋅) - функция Хэвисайда:
норма и Θ(⋅) - функция Хэвисайда:

Рекуррентными являются состояния рекуррентной точки (recurrence points)  , попадающие в m - мерную окрестность с радиусом εi и центром в
, попадающие в m - мерную окрестность с радиусом εi и центром в  .
.
Размер окрестности εi определяет радиус окрестности в фазовом пространстве с центром в точке  . Если точка xj попадает внутрь данной окрестности, то такое состояние считается подобным состоянию
. Если точка xj попадает внутрь данной окрестности, то такое состояние считается подобным состоянию  . Радиус εi выбирается либо непосредственно для каждой точки, исходя из получения в такой окрестности некоторого заранее определенного количества рекуррентных данной точек, либо постоянным, что дает симметричную диаграмму и является наиболее используемым вариантом.
. Радиус εi выбирается либо непосредственно для каждой точки, исходя из получения в такой окрестности некоторого заранее определенного количества рекуррентных данной точек, либо постоянным, что дает симметричную диаграмму и является наиболее используемым вариантом.
Тип нормы  оказывает влияние на вид диаграммы. Как правило, используются нормы L1, L2 (евклидова норма), L∞ (максимальная норма): норма L∞ обеспечивает нахождение наибольшего (фиг. 1), L2 - среднего (фиг. 2), a L1 - минимального количества соседних точек (фиг. 3). При построении рекуррентных диаграмм используется норма L∞, так как она независима от размерности фазового пространства, наиболее просто вычисляема и позволяет изучать диаграммы теоретически, поскольку аналитические выражения для L∞ решаются проще, нежели для любой другой нормы [Thiel М. et all. Influence of observational noise on the recurrence quantification analysis//Physica D. 2002. 171 (3). P. 138-152].
оказывает влияние на вид диаграммы. Как правило, используются нормы L1, L2 (евклидова норма), L∞ (максимальная норма): норма L∞ обеспечивает нахождение наибольшего (фиг. 1), L2 - среднего (фиг. 2), a L1 - минимального количества соседних точек (фиг. 3). При построении рекуррентных диаграмм используется норма L∞, так как она независима от размерности фазового пространства, наиболее просто вычисляема и позволяет изучать диаграммы теоретически, поскольку аналитические выражения для L∞ решаются проще, нежели для любой другой нормы [Thiel М. et all. Influence of observational noise on the recurrence quantification analysis//Physica D. 2002. 171 (3). P. 138-152].
Кроме изображения рекуррентности в виде черных точек можно изобразить расстояние между состояниями системы на диаграмме расстояний [Iwanski J. S., Bredley E. Recurrence plots of experimental data: To embed or not to embed?//Chaos - 1998. - №8(4). - P. 861-871], которая отображается на некоторую цветную палитру:

При их использовании в одномерном сигнале двухмерность статистических связей элементов изображения проявляется главным образом в виде увеличения интервала корреляции, что позволяет более эффективно применять простые алгоритмы обработки одномерных данных погруженных в фазовое пространство.
Для характеристики сканирования в целом используют среднее значение ОИЭ по N=kpm (где k - число частей на которые делится сторона гиперкуба (изображения) размерности р при каждом очередном разбиении m) элементам массива
которую называют окрестностным индексом сканирования Jc (ОИС) и является функцией закона сканирования и отражает ее свойства.
Разные двумерные сканирования обладают разными свойствами сохранения "окрестности" элементов i массива, причем диапазон изменения ОИС находится в границах 2,0-4,6 [Н.Д. Горский, С.Н. Мысько, В.П. Сухаричев. Сравнительное исследование некоторых характеристик двумерных разверток. Препринт ЛНИВЦ АН СССР, №44, Л., 1982. стр. 10], который можно разбить на три части. Простейшие сканирования занимают нижнюю часть диапазона со значениями окрестностного индекса развертки Jc(∞)=2. Различные виды рекурсивного сканирования (k=2, 3) с различными типами эталонных ячеек занимают соответствующими значениями ОИС Jc верхнюю часть диапазона. Промежуточное положение занимают рекурсивные сканирования, не обладающие свойством квазинепрерывности.
Так как ОИЭ является функцией закона сканирования и при конкретном сканировании зависит от местоположения элемента массива, то неудачный выбор типа сканирования может привести к разрушению информации, содержащейся во взаимном расположении элементов изображения. Это определяет задачу выбора из множества методов сканирования, вносящих меньше искажений в искомое поле.
Важнейшие свойства сканирования-непрерывность и блочная структура. Непрерывность сканирования выражается в том, что соседние отсчеты в последовательности являются соседними и на изображении. При этом траектория сканирования долго «удерживается» в каждой локальной области изображения, обеспечивая сильную корреляцию последовательности отсчетов, а блочная структура дает возможность осуществить рекурсивную алгоритмизацию сканирования [Александров Р.В. Представление и обработка изображений. Рекурсивный подход/Р.В. Александров, И.Д. Горский. Л.: Наука, 1985.102 с.].
Показатели топологических характеристик сканирования ОИС и ОИЭ не достаточны для выбора способа сканирования, поскольку они не ориентированы на использование при обработке изображений и являются для данного применения функционально избыточными (и, следовательно, сложными). Выбор способа сканирования определяется не только ее топологией, но и с классом изображений и целью их обработки. Методы сканирования изображений с точки зрения их возможностей должны сохранять фрактальные и статистические свойства при их преобразовании к одномерному виду. Это позволит выбрать способ сканирования компромиссным с точки зрения его реализационной сложности и сохранения фрактальных свойств изображения. В связи с этим сравним свойства сканирования путем статистического анализа упорядоченного двумерного массива, преобразованного конкретным сканированием к упорядоченному одномерному виду.
2. Сохранение локальности в однородных кривых Гильберта определяется самой кривой, т.е. используемыми аффинными преобразованиями и избранным ядром. Важной характеристикой кривых Пеано, тесно связанной с условием Гёльдера-Липшица [4], является квадратно-линейное отношение растяжения (dilation)2 (2 Дилатация (от лат. dilatatio) обозначает расширение, разбавление, растяжение.) [Бауман К.Е. Коэффициент растяжения кривой Пеано-Гильберта//Математические заметки. Т. 80 Вып. 5 Ноябрь 2006. С. 643-656; Щепин Е.В., Бауман К.Е. Минимальная кривая Пеано//Труды математического института им. В.А. Стеклова, 2008, Т. 263, С. 251-271], которое для пары p(t), p(τ) точек3 (3 Точкой кривой называют точку ее графика, т.е. точка кривой Пеано - это пара t, p(t), где t принадлежит отображаемому отрезку, p(t) - квадрату-образу.) ЗПК Пеано р: [0, 1]→[0, 1]×[0, 1] величина
 .
.
Верхняя грань квадратно-линейных отношений для всевозможных пар различных точек кривой называется квадратно-линейным отношением кривой. Для приложений представляют интерес кривые с возможно меньшим квадратно-линейным отношением, для которой лучше локальные сохраняющие свойства отображения [Щепин Е.В., Бауман К.Е. Минимальная кривая Пеано//Труды математического института им. В.А. Стеклова, 2008, Т. 263, С. 251-271].
Среди кривых Пеано фрактального рода 9 по теореме 8 [Щепин Е.В., Бауман К.Е. Минимальная кривая Пеано//Труды математического института им. В.А. Стеклова, 2008, Т. 263, С. 251-271] выделяется уникальная минимальная N-образная кривая Пеано (фиг. 4, 5) с квадратно-линейным отношением  , меньшим чем у кривой Пеано-Гильберта, глубина4 (4 Глубиной правильной фрактальной кривой Пеано называется наибольшее натуральное число d, для которого кривая имеет стык порядка d, не подобный никакому стыку меньшего порядка. Ограничение кривой Пеано на пару соседних фрактальных периодов порядка k называется стыком порядка к этой кривой.) которой не превосходит 9.
, меньшим чем у кривой Пеано-Гильберта, глубина4 (4 Глубиной правильной фрактальной кривой Пеано называется наибольшее натуральное число d, для которого кривая имеет стык порядка d, не подобный никакому стыку меньшего порядка. Ограничение кривой Пеано на пару соседних фрактальных периодов порядка k называется стыком порядка к этой кривой.) которой не превосходит 9.
3. Выбор и обоснование оптимальности обработки изображения
Правильная фрактальная кривая Пеано5 (5 Правильной фрактальной кривой Пеано называется отображение отрезка на квадрат, допускающее разбиение области определения на несколько равных отрезков (фрактальных периодов) таких, что ограничение кривой на любой из ее фрактальных периодов подобно всей кривой. Количество (минимально возможное) фрактальных периодов называется фрактальным родом кривой.) p(t), отображающая единичный отрезок на единичный квадрат (единичная кривая) параметризуется площадью, т.е. площадь образа любого интервала равна длине этого интервала.
Количественный анализ путем параметризации площадью сканирования (развертки) погружением в фазовое пространство изображения [Алатар А.И., Михайлов А.А. Алгоритмы сканирования (развертки) информационных систем восстановления динамических изображений//Известия Тульского государственного университета. Технические науки. - 2018. Вып. 10. - С. 399-411] при выделении фрактальных признаков изображений методом анализа временного ряда  BDS-статистикой [Шаповалов А.В. Выбор метода развертки цифровых изображений при анализе их фрактальных признаков в фазовом пространстве с использованием BDS-теста/А.В. Шаповалов //Системи
BDS-статистикой [Шаповалов А.В. Выбор метода развертки цифровых изображений при анализе их фрактальных признаков в фазовом пространстве с использованием BDS-теста/А.В. Шаповалов //Системи 
 та
та  К.: 2012. Вип. 3 (23). С. 116-121; Kanzler Ludwig. Very Fast and Correctly Sized Estimation of the BDS Statistic/Ludwig Kanzler//Christ Church and Department of Economics University of Oxford. - 1999. - 95 с], погруженному в m-мерное псевдофазовое пространство, осуществляют путем параметризации площадью кросс-рекуррентной диаграммы изображения. Все типы сканирования с разбросом ОИС от единицы до четырех, в отсутствии шума, дают надежные результаты локализации искусственных объектов на изображении по вычисленному полю BDS-статистик при нелинейном анализе временных рядов.
К.: 2012. Вип. 3 (23). С. 116-121; Kanzler Ludwig. Very Fast and Correctly Sized Estimation of the BDS Statistic/Ludwig Kanzler//Christ Church and Department of Economics University of Oxford. - 1999. - 95 с], погруженному в m-мерное псевдофазовое пространство, осуществляют путем параметризации площадью кросс-рекуррентной диаграммы изображения. Все типы сканирования с разбросом ОИС от единицы до четырех, в отсутствии шума, дают надежные результаты локализации искусственных объектов на изображении по вычисленному полю BDS-статистик при нелинейном анализе временных рядов.
В результате BDS-теста при сканировании изображения, элементы которого разворачиваются в вектор  , формируется гистограмма распределения BDS-статистики
, формируется гистограмма распределения BDS-статистики  (аббревиатура от фамилий ее предложивших) [Brock W.A. A test for independence based on the correlation dimension/Brock W.A., Dechert W.D., LeBaron В., Scheinkman J.A.//Econometric Reviews. 1996. №15(3). P. 197-235]. Анализ BDS-статистик, полученных для различного сканирования, позволяет с заданной достоверностью принимать гипотезу о том, что сканирование, для которой BDS-статистика меньше, в большей степени разрушает зависимости между элементами (пикселями) в изображении.
(аббревиатура от фамилий ее предложивших) [Brock W.A. A test for independence based on the correlation dimension/Brock W.A., Dechert W.D., LeBaron В., Scheinkman J.A.//Econometric Reviews. 1996. №15(3). P. 197-235]. Анализ BDS-статистик, полученных для различного сканирования, позволяет с заданной достоверностью принимать гипотезу о том, что сканирование, для которой BDS-статистика меньше, в большей степени разрушает зависимости между элементами (пикселями) в изображении.
BDS-статистика [Brock W.A. A test for independence based on the correlation dimension/Brock W.A., Dechert W.D., LeBaron В., Scheinkman J.A.//Econometric Reviews. 1996. №15(3). P. 197-235] определяется расчетом по временному ряду  , погруженному в m-мерное псевдофазовое пространство, величиной
, погруженному в m-мерное псевдофазовое пространство, величиной  :
:

где σm,n(ε) - стандартное отклонение случайной величины Cm,N(ε)-[С1,N(ε)]m.
Тогда для выборки из N наблюдений корреляционные интегралы Cm,N(ε), C1,N(ε) для фазового пространства размерности m вычисляется с использованием следующего выражения:

где  - функция Хэвисайда:
- функция Хэвисайда:

определяющих частоту попадания произвольной пары точек  и
и  , заданных своими проекциями (xs, xs+1, …, xs+m) и (xt, xt+1, …, xt+m) в m-мерном фазовом пространстве, в m-мерную гиперсферу радиуса ε, а знаменатель равен среднеквадратическому отклонению σm,N(ε) числителя.
, заданных своими проекциями (xs, xs+1, …, xs+m) и (xt, xt+1, …, xt+m) в m-мерном фазовом пространстве, в m-мерную гиперсферу радиуса ε, а знаменатель равен среднеквадратическому отклонению σm,N(ε) числителя.
BDS-статистика основана на использовании корреляционной размерности (корреляционного интеграла) процесса в псевдофазовом пространстве заданной размерности m. Корреляционный интеграл Сm определяет частоту попадания произвольной пары точек в фазовом пространстве в окрестность ε-радиус гиперсферы, которая стремится к определенному пределу (фрактальной размерности) по мере уменьшения ε. Вычисление BDS-статистики осуществляется для процессов, погруженных в псевдофазовое пространство размерности m. Значение BDS-статистики стремится к определенному пределу по мере уменьшения ε в диапазоне ε=0.5σ÷2σ, где σ - среднеквадратическое отклонение ряда  . Зависимость корреляционного интеграла от ε имеет степенной вид
. Зависимость корреляционного интеграла от ε имеет степенной вид  где Dc - корреляционная размерность временного ряда. Корреляционная размерность определяется средним числом точек хj от хi, расстояние между которыми меньше ε
где Dc - корреляционная размерность временного ряда. Корреляционная размерность определяется средним числом точек хj от хi, расстояние между которыми меньше ε

где С(ε, N) - корреляционный интеграл; ε - радиус корреляции; N - число точек, используемых для оценки размерности; Θ - функция Хевисайда;  - вектор в n-мерном фазовом пространстве
- вектор в n-мерном фазовом пространстве

Значение Cm,N зависит от размерности псевдофазового пространства. Брок и др. показали [Brock W.A. A test for independence based on the correlation dimension/Brock W.A., Dechert W.D., LeBaron В., Scheinkman J.A.//Econometric Reviews. 1996. №15(3). P. 197-235; Schreiber T. Discrimination power of measures for nonlinearity in a time series/A. Schmitz//Physical Review E. - 1997. - V. 55, №5. - P. 5], что  со 100% вероятностью при N→∞, a
со 100% вероятностью при N→∞, a  является случайной величиной с асимптотически гауссовским распределением с нулевым средним и среднеквадратическим отклонением
является случайной величиной с асимптотически гауссовским распределением с нулевым средним и среднеквадратическим отклонением  , которое определяется как:
, которое определяется как:

где 
Для процессов с независимыми значениями, идентично распределенными (IID-independent and identical distributed) случайными величинами, BDS-статистика имеет нормальный закон распределения с нулевым средним, оценка  которой близка к ее теоретическому значению σ(ε) [Сосулин Ю.Г. Фрактальное обнаружение протяженных малоконтрастных объектов на изображениях/Ю.Г. Сосулин, А.Б. Русский// Радиотехника. 2009. №9. 12. С. 48-57].
которой близка к ее теоретическому значению σ(ε) [Сосулин Ю.Г. Фрактальное обнаружение протяженных малоконтрастных объектов на изображениях/Ю.Г. Сосулин, А.Б. Русский// Радиотехника. 2009. №9. 12. С. 48-57].
III. Разделение множества цветов изображения. Обработка RAW сигнала изображения осуществляют по одному из R-, G- и В- цветовому компоненту, которая формируется путем разделения цветным фильтром светового потока на спектральные составляющие - красную (R), зеленую (G) и синюю (В) - по числу преобразователей изображения на видеоматрице. Цветовые компоненты соответствующих пикселей, составляющих RAW изображение, располагаются согласно компоновке Байера, частотные характеристики в компоновке пикселей G-компонента в RAW изображении отличаются от частотных характеристик в компоновке пикселей R- и B-компонентов. Поскольку обработка восстановления изображения эквивалентна коррекции частотных характеристик, полоса частот G-компонента отличается от полосы частот R-компонента или B-компонента.
Если входное изображение является цветным RGB-изображением, предпочтительно формировать три фильтра восстановления изображения, соответствующие соответствующим цветовым компонентам, т.е. для чтения R-, G- и В-компонентам изображения по пикселям, например, может применяться к каждому пикселю маска красного 110000, зеленого 001100 и голубого 000011.
IV. Непрерывное вейвлет-преобразование (англ. continuous wavelet transform, CWT) - интегральное преобразование, которое представляет собой свертку ψ(t) - материнской вейвлет-функции (mother wavelet) с сигналом x(t), определенные на временной оси переменной t [Addison P.S. The Illustrated Wavelet Transform Handbook. - IOP, 2002. P. 351]:
где ψ* означает комплексное сопряжение для ψ, параметр b∈R соответствует временному сдвигу, и называется параметром положения, параметр а>0 задает масштабирование и называется параметром растяжения,  - весовая функция.
- весовая функция.
Вейвлет-преобразование переводит сигнал из временного представления в частотно-временное, что позволяет сжать исходный набор данных. Вейвлеты (англ. wavelet «маленькая волна») локальны во времени и по частоте и получаются из одной базовой, изменяя ее (сдвигая, растягивая).
Если  фурье-преобразование для вейвлета ψ(t), то есть
фурье-преобразование для вейвлета ψ(t), то есть

тогда должно выполняться условие допустимости:
т.е. вейвлет при нулевой частотной компоненте должен удовлетворять условию  или вейвлет ψ(t) должен иметь среднее равное нулю.
или вейвлет ψ(t) должен иметь среднее равное нулю.
Изначальная функция восстанавливается обратным преобразованием

В численном и функциональном анализе дискретные вейвлет-преобразования (ДВП) относятся к вейвлет-преобразованиям, в которых вейвлеты представлены дискретными сигналами (выборками).
В заявляемом способе используется наиболее простое вейвлет преобразование в виде ступенчатой функции (фиг. 6)

т.е. преобразование Хаара (ПХ) [Казарян М.Л. Исследование вейвлет-преобразований Хаара на корректность в контексте задачи космического мониторинга земли// Известия высших учебных заведений. Северо-Кавказский регион. Естественные науки. 2013. №6. С. 14 -17], лапласовский образ которой с параметром преобразования Лапласа р равен

V. Восстановление изображения. Деградированное изображение g(x, у) и исходное изображение ƒ(х, у) связано через функцию рассеяния точки (PSF) h(x, у), полученной посредством обратного преобразования Фурье оптической передаточной функции (OTF)6 (6 OTF (оптическая передаточная функция) получается посредством преобразования Фурье для PSF.):
g(x,y)=h(x,y)*ƒ(x,y),
где * представляет свертку, а (х, у) представляет координаты на изображении.
Когда это уравнение преобразуется в форму отображения на частотной плоскости посредством преобразования Фурье, оно принимает форму произведения для каждой частоты, как представлено в уравнении:

где Н(u, ν) - преобразование Фурье для PSF h(x, у) и представляет OTF, a F(u, ν) - преобразование Фурье для деградированного изображения ƒ(x, у), представляют координаты на двумерной частотной плоскости, т.е. частоту.
Чтобы получить исходное из считываемого необработанного (RAW) деградированного изображения, обе стороны уравнения (1) могут быть разделены на Н(u, ν), как представлено в уравнении,

где R(u, ν) называется фильтром восстановления изображения.
Фактическое изображение включает в себя компоненты шума. По этой причине, использование фильтра восстановления изображения, сформированного посредством взятия идеальной обратной функции из OTF вышеуказанным способом, будет усиливать компоненты шума вместе с деградированным изображением. В настоящее время для подавления шума в изображении используют фильтр Винера.
Поскольку OTF варьируется при построении изображения по масштабу изображения и диаметру апертуры, необходимо соответствующим образом изменять фильтр восстановления изображения, используемый для обработки восстановления изображения.
Выполнение обработки восстановления изображения для считываемого входного изображения может повышать качество изображения посредством коррекции аберраций.
Аналоги и их недостатки
Известен способ преобразования и обработки цифрового изображения на основе многоцентричной развертки [Патент №2517715 РФ G06T 5/00, H04N 7/00 Опубл. 27.05.2014, Бюл. №15], построенной по правилам кривой заполняющей плоскость (КЗП), начальную ячейку многоцентричной развертки (МЦР) представляют дискретным квадратом, состоящим из девяти клеток (3×3=9), имеющим свой центр и свои четыре грани (стороны); развертку начальной ячейки МЦР выполняют от центра к краю квадрата и далее с обходом остальных ячеек по кругу; приоритетным является путь с направлением обхода влево от центра квадрата и далее по часовой стрелке; формируемая конструкция является фасетом (pFas), где р - шаг рекурсии, при р=1 имеют описанную выше начальную ячейку (3×3=9); для построения дальнейших направлений рекурсий различают четыре типа обхода: описанный выше обход w1 как начальный (1Fas1), обход w2 как зеркальный от 1Fas1 в левую сторону (1Fas2), обход w3 как зеркальный от 1Fas2 в верхнюю сторону (1Fas3), обход w4 как зеркальный от 1Fas3 в правую сторону; для получения направления рекурсий МЦР применяют 2Fas (р=2, со стороной в 9 клеток, 9×9=81), где центром задают 1Fas; на основе вышеуказанных вращений w выполняют обход в последовательности с начальным движением в квадрат влево от 1Fas и далее по часовой стрелке вокруг 1Fas: w1 w2 w3 w4 w3 w2 w3 w4 w3; далее запускают рекурсию МЦР на основе 1Fas и 2Fas (р>2), представляя плоскость в координатах вращения (w), носителем которых является pFas, а точкой этой плоскости,  есть квадрат со стороной 3р, где р=0…N, при этом N задает сторону квадрата, в который вкладывают габарит исходного изображения; при р=0 (0Fas) точка вырождается в пиксел; при р>0 МЦР разбивает плоскость на
есть квадрат со стороной 3р, где р=0…N, при этом N задает сторону квадрата, в который вкладывают габарит исходного изображения; при р=0 (0Fas) точка вырождается в пиксел; при р>0 МЦР разбивает плоскость на  независимых точек (квадратов); параметры х, у для Q - это его центр на плоскости; в результате образуют многокоординатное пространство точки Q: две координаты декартового измерения (х, у), координата измерения вращения (w), координата измерения размера граней фасета pFas, координата измерения номера хранения
независимых точек (квадратов); параметры х, у для Q - это его центр на плоскости; в результате образуют многокоординатное пространство точки Q: две координаты декартового измерения (х, у), координата измерения вращения (w), координата измерения размера граней фасета pFas, координата измерения номера хранения  в памяти вычислителя Fp; причем эти координаты измерений комбинируют в зависимости от поставленных задач; общим для этих координат является отображение декартовой плоскости в память при взаимно однозначном и непрерывном отображении точки
в памяти вычислителя Fp; причем эти координаты измерений комбинируют в зависимости от поставленных задач; общим для этих координат является отображение декартовой плоскости в память при взаимно однозначном и непрерывном отображении точки  в память вычислителя Fp.
в память вычислителя Fp.
Недостатками данного способа являются
- размытие деталей изображения независимо от вида шумов, которое характеризует их разрешающую способность, вследствие низкой топологической связанности пикселей использованной кривой Гильберта - Пеано при сканировании (развертке);
- сложность аппаратной реализации, поскольку алгоритмы подавления шума в изображениях, реализуемые на вычислительных устройствах, требуют формировать способ оптимального сканирования двумерного массива R2 изображения в виде линейно-упорядоченной последовательности элементов R1, для снижения затрат на решение задачи, определяемых по экспоненте от ее размерности;
- низкая степень релевантности (т.е. по информационной ценности для наблюдателя) на начальном уровне представления изображения из-за выделения семантических зон интересов в изображении без предварительных обработок;
- низкое быстродействие из-за увеличенного размера площади сходимости;
- низкая степень сжатия изображения;
- низкая эффективность работы с оцифрованными сигналами любого частотного диапазона и полученных любым типом сенсоров.
Известно устройство алфавитного формата сжатия изображения без потерь [Полезная модель к патенту №138747 РФ H04N 1/047, H04N 19/189 Опубл. 20.03.2014 Бюл. №8], в котором входное изображение поступает во входной блок разложения изображения из растра в площади типа квадрат с помощью самоподобных отображений от центра квадрата в виде многоцентричной развертки (МЦР) с получением на базе перечислимого алфавита формы текстового файла с осмысленным для наблюдателя представлением элементов изображения, выход которого подключен к входу блока формирования выходного текстового файла-пакета из денотирующей, знаковой и концептирующей компонент изображения, представленного в релевантной форме, различающей: хаос, компакты, контуры, отдельно стоящие линии; непосредственно на полученной форме, как формате сжатия, в дальнейшем выполняемы все классы обработки изображения, включая прямую аппроксимацию и векторизацию.
Недостатками данного устройства являются
- размытие деталей изображения независимо от вида шумов, которое характеризует их разрешающую способность, вследствие низкой топологической связанности пикселей использованной кривой Гильберта - Пеано при сканировании (развертке);
- сложность аппаратной реализации, поскольку алгоритмы подавления шума в изображениях, реализуемые на вычислительных устройствах, требуют формировать способ оптимального сканирования двумерного массива R2 изображения в виде линейно-упорядоченной последовательности элементов R1, для снижения затрат на решение задачи, определяемых по экспоненте от ее размерности;
- низкая степень релевантности (т.е. по информационной ценности для наблюдателя) на начальном уровне представления изображения из-за выделения семантических зон интересов в изображении без предварительных обработок;
- низкое быстродействие из-за увеличенного размера площади сходимости;
- низкая степень сжатия изображения;
- низкая эффективность работы с оцифрованными сигналами любого частотного диапазона и полученных любым типом сенсоров.
Прототипы и их недостатки
Наиболее близким техническим решением к изобретению (прототипом) является способ обработки изображений [Патент №2523924 G06T 5/00, H04N 5/357 Опубл. 27.07.2014 Бюл. №21], в котором для выполнения обработки восстановления данных изображения, чтобы скорректировать ухудшение качества изображения из-за аберрации в оптической системе формирования изображений, причем упомянутые данные изображения получены считыванием изображения объекта, прошедшего через оптическую систему формирования изображений, с использованием датчика изображений, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветных фильтров множества цветов, причем способ содержит:
- этап разделения, на котором разделяют данные изображения множества цветов множества цветных фильтров на множество данных изображения соответствующих цветов, причем на этапе разделения данные изображения одного цвета, чья пространственно-частотная характеристика выше пространственно-частотной характеристики другого цвета из-за компоновки цветных фильтров множества цветов, разделяются на множество данных изображения упомянутого одного цвета, таким образом, чтобы множество данных изображения упомянутого одного цвета каждое имело такую же пространственно-частотную характеристику, как данные изображения другого цвета;
- этап обработки изображений, на котором выполняют обработку восстановления посредством обработки с помощью фильтра для каждых из данных изображения соответствующих цветов, разделенных на этапе разделения, с использованием множества соответствующих средств обработки изображений, расположенных последовательно, причем на этапе обработки изображений каждое из множества средств обработки изображений выполняет обработку восстановления в отношении данных изображения каждого цвета, которые не были подвернуты обработке восстановления, и отдельно обращается с данными изображения одного цвета, чья пространственно-частотная характеристика выше пространственно-частотной характеристики другого цвета из-за компоновки цветных фильтров множества цветов, как с данными изображения множества цветов, с которой обращаются отдельно таким образом, чтобы часть данных изображения, с которой обращаются отдельно, как с множеством цветов, и которая обрабатывается множеством средств обработки изображений, имела такую же частотную характеристику, как данные изображения другого цвета;
- этап обработки интерполяции, на котором выполняют обработку интерполяции цветов каждого пикселя для данных изображения, подвергнутых обработке восстановления, посредством использования данных изображения множества цветов, как если бы это были данные изображения одного цвета.
Недостатками данного способа являются
- размытие деталей изображения независимо от вида шумов, которое характеризует их разрешающую способность, вследствие низкой топологической связанности пикселей при сканировании (развертке);
- сложность аппаратной реализации, поскольку алгоритмы подавления шума в изображениях, реализуемые на вычислительных устройствах, требуют формировать способ оптимального сканирования двумерного массива R2 изображения в виде линейно-упорядоченной последовательности элементов R1, для снижения затрат на решение задачи, определяемых по экспоненте от ее размерности;
- низкая степень релевантности (т.е. по информационной ценности для наблюдателя) на начальном уровне представления изображения из-за выделения семантических зон интересов в изображении без предварительных обработок;
- низкое быстродействие из-за увеличенного размера площади сходимости;
- низкая степень сжатия изображения;
- низкая эффективность работы с оцифрованными сигналами любого частотного диапазона и полученных любым типом сенсоров.
Наиболее близким техническим решением к изобретению (прототипом) является устройство обработки изображений [Патент №2523924 G06T 5/00, H04N 5/357 Опубл. 27.07.2014 Бюл. №21], в котором для выполнения обработки восстановления данных изображения, чтобы скорректировать ухудшение качества изображения из-за аберрации в оптической системе формирования изображений, причем упомянутые данные изображения получены считыванием изображения объекта, прошедшего через оптическую систему формирования изображений, с использованием датчика изображений, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветных фильтров, причем устройство обработки изображений содержит:
- средство разделения для разделения данных изображения множества цветов цветных фильтров на данные изображения соответствующих цветов цветных фильтров в компоновке Байера, которое выполнено с возможностью разделять данные изображения одного цвета, чья пространственно-частотная характеристика выше пространственно-частотной характеристики другого цвета из-за компоновки множества цветных фильтров множества цветов, на множество данных изображения упомянутого одного цвета, таким образом, чтобы это множество данных изображения упомянутого одного цвета имело такую же пространственно-частотную характеристику, как данные изображения другого цвета;
- множество расположенных последовательно средств обработки изображений, каждое из которых предназначено для выполнения обработки восстановления посредством обработки с помощью фильтра данных изображения одного из соответствующих цветов, разделенных упомянутым средством разделения, которое выполнено с возможностью осуществлять обработку свертки для упомянутого фильтра, а для выполнения обработки восстановления данных изображения, чтобы скорректировать ухудшение качества изображения из-за аберрации в оптической системе формирования изображений, причем упомянутые данные изображения получены считыванием изображения объекта, прошедшего через оптическую систему формирования изображений, с использованием датчика изображений, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветных фильтров, причем каждое из упомянутого множества средств обработки изображений выполнено с возможностью осуществлять обработку восстановления для соответствующих данных изображения каждого цвета, который не был подвергнут обработке восстановления, и отдельно обращается с данными изображения одного цвета, чья пространственно-частотная характеристика выше пространственно-частотной характеристики другого цвета из-за компоновки цветных фильтров множества цветов, как с данными изображения множества цветов, таким образом, чтобы часть данных изображения, с которой нужно обращаться отдельно, как с данными изображения множества цветов, и которая должна обрабатываться упомянутым множеством средств обработки изображений, имела такую же частотную характеристику, как данные изображения другого цвета, а для обработки с помощью фильтра, выполняемой множеством средств обработки изображений, используется соответствующий фильтр, содержащий двумерный фильтр, полученный посредством обратного преобразования Фурье для функции, сформированной на основе обратной функции от оптической передаточной функции оптического элемента оптической системы формирования изображений, причем упомянутое множество средств обработки изображений дополнительно выполнено с возможностью осуществлять обработку свертки для упомянутого фильтра;
- средство обработки интерполяции для выполнения обработки интерполяции цветов каждого пикселя, как если бы это были данные изображения одного цвета, подвергнутых обработке восстановления, причем фильтр, используемый для обработки с помощью фильтра, выполняемой упомянутым средством обработки изображений, содержит двумерный фильтр, полученный посредством выполнения обратного преобразования Фурье для функции, сформированной на основе обратной функции от передаточной функции оптического элемента оптической системы формирования изображений.
Недостатками данного устройства являются
- размытие деталей изображения независимо от вида шумов, которое характеризует их разрешающую способность, вследствие низкой топологической связанности пикселей при сканировании (развертке);
- сложность аппаратной реализации, поскольку алгоритмы подавления шума в изображениях, реализуемые на вычислительных устройствах, требуют формировать способ оптимального сканирования двумерного массива R2 изображения в виде линейно-упорядоченной последовательности элементов R1, для снижения затрат на решение задачи, определяемых по экспоненте от ее размерности;
- низкая степень релевантности (т.е. по информационной ценности для наблюдателя) на начальном уровне представления изображения из-за выделения семантических зон интересов в изображении без предварительных обработок;
- низкое быстродействие из-за увеличенного размера площади сходимости;
- низкая степень сжатия изображения;
- низкая эффективность работы с оцифрованными сигналами любого частотного диапазона и полученных любым типом сенсоров.
Описание изобретения.
Технической задачей, решаемой заявляемым способом, является повышение качества процедуры построения и обработки динамического изображения. Способ преобразования и обработки цифрового изображения на основе минимального N-образного сканирования (MNC) (минимальной N-образной развертки (MNP)) в виде минимальной N-образной диагональной кривой Пеано с 9-м фрактальным родом предназначен для преобразования строчного (растрового) представления изображения в самоподобные квадраты согласно отображениям типа КЗП. Применение MNC (MNP) позволяет в несколько раз поднять эффективность реализации процедур по существующим классам системы обработки изображений.
Сопоставительный анализ с прототипом показывает, что технический результат заявляемого устройства определяется:
- снижением размытия деталей изображения независимо от вида шумов, которое характеризует их разрешающую способность при сканировании (развертке);
- снижением сложности аппаратной реализации и затрат на решение задачи, поскольку сложность задачи растет экспоненциально с ростом размерности;
- повышением степени релевантности (т.е. по информационной ценности для наблюдателя) на начальном уровне представления изображения, поскольку алгоритмы подавления шума в изображениях, реализуемые на вычислительных устройствах, учитывают многомерную связанность элементов многомерного пространства изображения и линейность архитектуры ЭВМ;
- повышением быстродействия, которое достигается за счет уменьшения площади сходимости.
- повышение степени сжатия изображения;
- возможность эффективной работы с оцифрованными сигналами любого частотного диапазона и полученных любым типом сенсоров.
Способ имеет программную и аппаратную реализации.
Технический результат достигается тем, что для решения данных задач в предлагаемом способе построения и обработки изображений на множестве цветов в компоновке Байера для оптической системы формирования изображений с использованием датчика изображений, имеющего множество элементов оптической системы, в виде пикселей для формирования необработанного деградированного изображения объекта (RAW), при этом каждый пиксель датчика изображений для каждой части данных изображения соответствующего множества цветов в компоновке Байера покрывается одним из множества фильтров цветов, включающий:
- этап разделения, на котором разделяют данные изображения множества цветов множеством цветных фильтров на множество изображения соответствующих - R - G - B цветов;
- этап обработки изображений, на котором последовательно выполняют восстановление с помощью фильтра для каждой части данных изображения соответствующего множества цветов в компоновке Байера, разделенных на этапе разделения, с использованием множества соответствующих средств обработки изображений, после чего осуществляют коррекцию обработки изображения, а также дополнительно включает:
- этап сканирования RAW изображения - R - G - В цветов, прошедшего через оптическую систему формирования изображений на основе минимального N-образного сканирования (MNC);
- этап обработки цветов каждого пикселя для данных изображения, подвергнутых обработке восстановления выполняется посредством использования данных изображения множества цветов, как если бы это были данные изображения одного цвета;
- этап рекурсивной развертки обработанных данных изображения на основе минимальной N-образной развертки (MNP);
- этап восстановления каждого пикселя цветов для изображения в компоновке Байера;
- на начальном этапе при реализации минимального N-образного сканирования (MNC) единичный квадрат-образ (К01) со стороной 1 обрабатываемого изображения делится на девять конгруэнтных7 (7 Конгруэнтность (лат. congruens - соразмерный, соответствующий, совпадающий) двух фигур или две части одной фигуры, если одна из них может быть переведена в другую сдвигом, вращением и зеркальным отображением (или их композицией) подквадратов и соответствующий единичный отрезок [0;1] (O01) также делится на девять равных отрезков и последовательно нумеруют подквадраты (К11; К12; К13; К14, …, К19), К11 сосед К12, К12 сосед К13 и К13 сосед К14 и т.д. и отрезок на 9 одинаковые части (отрезки О11, O12, O13, O14, …, O19), выбирается начало кривой в левом нижнем углу, а конец в правом верхнем и определяют, какой отрезок в какой подквадрат попадает (при этом соседние отрезки переходят в соседние по стороне подквадраты), для каждого маленького отрезка определяют координаты точек подквадрата, в которые попадают его начало, конец и середина, далее каждый маленький отрезок делится на девять частей и проводятся аналогичные построения, и т.д. до размера конгруэнтных подквадратов приблизительно равному размеру пикселя, определяют конгруэнтные подквадраты равными пикселю при формировании минимальной начальной ячейки единичного квадрата-образа, сканирование на нулевом шаге начальной ячейки (направление рекурсии) стартует по минимальной N-образной диагональной кривой Пеано с 9-м фрактальным родом, от начала в левом нижнем угле единичного квадрата, начала отрезка, в правый верхний угол единичного квадрата-образа, конец отрезка, на первом шаге, по пути с направлением обхода вверх от начала единичного квадрата-образа и далее вверх, затем поворот вправо, вниз, вниз, вправо, вверх, вверх к концу единичного квадрата-образа; формируемая начальная ячейка (3×3=9) при р=1 является фасетом8 (8 Фасет - скошенная грань чего-либо.) (pFas), где р - шаг рекурсии;
- сканирование, реализующее минимальное N-образное сканирование (MNC), RAW изображения объекта осуществляют циклически по дискретному квадратному фасету, построенным на основе сканирования по правилам кривой заполняющей плоскость (КЗП), с установкой начала и направления рекурсии, в виде минимальной N-образной диагональной кривой Пеано с 9-м фрактальным родом, для которой начальную ячейку сканирования (квадрат-образ) задают дискретным исходным единичным квадратом-образом, состоящим из девяти клеток (3×3=9) и имеющим четыре грани (стороны), начало и конец которого расположены в противоположных вершинах единичного квадрата-образа;
- обход подквадратов при минимальном N-образном сканировании (MNC) совершается путем переходов через операторы вращения (w) от одного к другому по принципу соседства по стороне, а переход через подквадрат осуществляют через его центр, далее устанавливается взаимно однозначное соответствие между отрезками и подквадратами, так чтобы соседние отрезки переходили через операторы вращения (w) в соседние (по стороне) подквадраты, т.е. O11 в К11, О12 в К12 и т.д., для построения дальнейших направлений рекурсий различают три типа операторов вращения (w) для обхода: описанный выше оператор вращения w1 вверх как начальный (1Fas1) от начала единичного квадрата-образа, оператор вращения w2 как зеркальный от 1Fas1 в правую сторону (1Fas2), оператор вращения w3 как зеркальный от 1Fas2 вниз (1Fas3), а для получения последующего направления рекурсий применяют 2Fas (р=2, со стороной в 9 клеток, 9×9=81), где начало задает конец 1Fas и т.д.;
- на основе вышеуказанных операторов вращений w выполняют обход в последовательности с начальным движением в подквадрат вверх от 1Fas и далее: начало→w1→w1→w2→w3→w3→w2→w1→w1→конец, а формирование кривой сканирования осуществляется путем соединения центров подквадратов линией по порядку обхода, получившихся на втором делении, входя в подквадрат К11 в левом нижнем углу, а заканчивая в правом верхнем углу, строится кривая Пеано последовательным обходом всех подквадратов, получившихся на предыдущем делении, который остается тем же (К11→K12→K13→K14→…→K19) и доопределяет расположение образов точек отрезка и правило обхода в каждом подквадрате Кni с точностью до поворота подобно правилу обхода в исходном единичном квадрате К01, определяя кривую Пеано как фрактал9 (9 Самоподобной геометрической фигурой называют фигуру, которую можно разрезать на конечное число одинаковых фигур, подобных ей самой. Объекты, обладающие таким свойством, американский математик Бенуа Мандельброт предложил называть фракталами (от лат. frangere - "ломать", "разбивать").;
- на этапе обработки осуществляют вейвлет-преобразование в виде преобразования Хаара над значением сигналов каждого пикселя от сосканированного множества значений состояний изображений датчика изображений, полученное при преобразовании Хаара значение каждого пикселя поступает на обработку изображений для восстановления с помощью фильтра в виде фильтра решения обратной задачи от оптической передаточной функции элемента оптической системы формирования RAW изображений, после чего осуществляют коррекцию обработки изображения и по окончанию обработки изображения осуществляют обратное преобразование Хаара над множеством изображений,
- на этапе минимальном N-образном рекурсивной развертки (MNP) полученное восстановленное после обратного вейвлет-преобразования значение запоминается в блоке памяти вычислителя по координате измерения номера хранения  согласованное со сканированием по закону MNP, представляя плоскость в координатах вращения (w), носителем которых является фасет - квадрат pFas с точкой этой плоскости
согласованное со сканированием по закону MNP, представляя плоскость в координатах вращения (w), носителем которых является фасет - квадрат pFas с точкой этой плоскости  , имеющего свой центр (ху), со стороной 3p и площадью 9р, где р=0…N, при этом N задает сторону единичного квадрата, в который вкладывают габарит исходного изображения; при р=0 (0Fas) точка вырождается в пиксель;
, имеющего свой центр (ху), со стороной 3p и площадью 9р, где р=0…N, при этом N задает сторону единичного квадрата, в который вкладывают габарит исходного изображения; при р=0 (0Fas) точка вырождается в пиксель;
при р>0 разбивается плоскость на  независимых точек (подквадратов);
независимых точек (подквадратов);
параметры х, у для Q - это его центр на плоскости;
в результате образуют многокоординатное пространство точки Q: две координаты декартового измерения (x, у), координата измерения вращения (w), координата измерения размера граней фасета pFas, координата измерения номера хранения  в памяти вычислителя Fp;
в памяти вычислителя Fp;
общим для этих координат является отображение декартовой плоскости в память при взаимно однозначном и непрерывном отображении точки  в память вычислителя Fp, причем переход на последующий фасет сканирования RAW изображения происходит после полного заполнения соответствующего фасета развертки блока в памяти вычислителя Fp, а окончание восстановления изображения осуществляется после заполнения всей площади развертки изображения.
в память вычислителя Fp, причем переход на последующий фасет сканирования RAW изображения происходит после полного заполнения соответствующего фасета развертки блока в памяти вычислителя Fp, а окончание восстановления изображения осуществляется после заполнения всей площади развертки изображения.
Система построения и обработки изображения, реализующая предложенный способ, содержит блок формирования изображений с использованием датчика изображений, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветовых фильтров, образующих блок разделения для разделения данных изображения множества цветов цветовых фильтров на данные изображения с аналоговыми запоминающими устройствами на выходе, соответствующих цветов цветовых фильтров в компоновке Байера, канал обработки сигнала, содержащий блок обработки сигналов, который реализован на соответствующем фильтре, полученном на основе обратной функции от свертки фильтрованного сигнала с ядром в виде оптической передаточной функции оптического элемента системы формирования изображений, блок коррекции сигнала, вход которого соединен с выходом блока обработки сигналов, а выход с выходом канала обработки сигнала, и блок отображения, выходы блока разделения цветов соединены с входами блока сканирования изображения, информационный выход которого соединен с информационным входом канала обработки сигнала, причем блок сканирования изображения состоит из блоков мультиплексоров и блока задания адреса, для сканирования RAW изображения по диагональной минимальной N-образной кривой Пеано, с сохранением исходной топологической и корреляционной связности двумерного изображения, в систему дополнительно введены вход начала сканирования, а в канал обработки сигнала дополнительно введен блок вейвлет-преобразования, на примере блока преобразования Харра, а также блок обратного преобразования Хаара, блок развертки, содержащий блок аналоговых демультиплексоров и блок аналоговых запоминающих устройств, и блок отображения, кроме этого десять элементов задержки сигнала и элемент "ИЛИ", причем адресные входы блока мультиплесоров подключены к выходам блока задания адресов, информационный выход блока сканирования изображения соединен с информационным входом канала обработки сигнала, который состоит из последовательно расположенных блока преобразования Харра, блока обработки сигналов, информационный выход которого соединен с информационным входом блока коррекции сигнала, выход которого через выход канала обработки сигнала подключен к информационному входу блока обратного преобразования Хаара, информационный выход последнего соединен с входом блока развертки, вход которого соединен с информационным входом блока демультиплексоров, адресные входы которого соединены с информационными выходами блока задания адресов блока сканирования изображения, а информационные выходы блока демультиплексоров соединены с информационными входами блока аналоговых запоминающих устройств и далее через выходы блока развертки с входами блока отображения, вход первого элемента задержки сигнала соединен с входами записи выходных аналоговых запоминающих устройств (АЗУ) цветовых фильтров блока разделения цветов, а выход первого элемента задержки сигнала подключен к входу установки в исходное состояние блока задания адресов, счетный вход которого через второй элемент задержки сигнала с входом тактирования блока мультиплексоров блока сканирования изображения, выход окончания мультиплексирования блока сканирования изображения соединен с входом тактирования блока преобразования Хаара и через третий элемент задержки сигнала с входом тактирования блока обработки сигнала и входом четвертого элемента задержки сигнала, выход которого соединен с входом тактирования блока коррекции сигнала и через пятый элемент задержки сигнала с входом тактирования обратного преобразования Хаара блока обратного преобразования Хаара и далее через шестой элемент задержки соединен с входом тактирования блока демультиплексоров, выход шестого элемента задержки соединен также через седьмой элемент задержки с входом тактирования блока аналоговых запоминающих устройств блока развертки и далее через десятый элемент задержки сигнала со счетным входом блока задания адресов блока сканирования изображения, а через восьмой элемент задержки сигнала с входом тактирования блока отображения и далее через девятый элемент задержки сигнала с первым входом элемента "ИЛИ", второй вход которого соединен с входом начала сканирования системы, а выход с входом первого элемента задержки сигнала.
На фиг. 1, 2, 3 приведены нормы, равные радиусу вокруг точки фазового пространства (черная точка), изображенные для двумерного фазового пространства: фиг. 1 - L1 фиг. 2 - L2, фиг. 3 - L∞, на фиг. 4 минимальная диагональная10 (10 Кривые Пеано, начало и конец которых расположены в противоположных вершинах квадрата-образа, называют диагональными.) N-образная кривая 9 рода (кривая MNC) при p=1, на фиг. 5 минимальная диагональная N-образная кривая 9 рода (кривая MNC) при р=2, на фиг. 6 скейлинг11 (11 Масштабная инвариантность или скейлинг - свойство уравнений физики, сохранять свой вид при изменении всех расстояний и промежутков времени в одинаковое число раз.) - функция Хаара, на фиг. 7 представлена структурная схема системы построения и обработки динамического изображения (СПиОИ), а на фиг. 8 приведен пример реализации блока задания адреса (БЗА), в котором на основе двоичного кода формируется код кривой MNC.
Структурная схема (фиг. 7) системы построения и обработки изображения (СПиОИ) содержит блок формирования изображений (БФИ) 1 с использованием датчика изображений (ДИ) 2, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветовых фильтров (ЦФ) 3, образующих блок разделения (БР) 4 для разделения данных изображения множества цветов цветовых фильтров (ЦФ) 3 на данные изображения с аналоговыми запоминающими устройствами (АЗУ) на выходе, соответствующих цветов цветовых фильтров (ЦФ) 3 в компоновке Байера, блок сканирования изображения (БСИ) 5, который состоит из блоков мультиплексоров (БMUX) 6 и блока задания адреса (БЗА) 7, для сканирования RAW изображения по диагональной минимальной N- образной кривой Пеано, с сохранением исходной топологической и корреляционной связности двумерного изображения, вход начала сканирования 8, канал обработки сигнала (КОС) 9 в виде последовательно расположенных блока вейвлет-преобразования, на примере блока преобразования Харра (БПХ) 10, блок обработки сигналов (БОС) 11, причем блок обработки сигналов 11 реализованы на соответствующих фильтрах, полученных на основе обратной функции от свертки фильтрованного сигнала с ядром в виде оптической передаточной функции оптического элемента системы формирования изображений, причем упомянутый блок обработки изображений КОС 9 дополнительно выполнен с возможностью осуществлять обработку свертки для упомянутого фильтра, блок коррекции сигнала (БКС) 12, блок обратного преобразования Хаара (БОПХ) 13, блок развертки (БР) 14, содержащий блок аналоговых демультиплексоров (БDMUX) 15 и блок аналоговых запоминающих устройств (БАЗУ) 16, а также блок отображения (БО) 17, десять элементов задержки сигнала τ1 18 - а τ10 27 и элемент "ИЛИ" 28.
Примеры реализации аналоговых запоминающих устройств (АЗУ) можно найти в книге Титце У., Шенк К. Полупроводниковая схемотехника: Справочное руководство. Пер. с нем. М.: Мир, 1982. - 512 с, например реализация на С. 284 рис. 17.17.
Примеры реализации аналоговых мультиплексоров MUX (DMUX) (демультиплексоров) приведены в работе Пухальский Г.И., Новосельцева Т.Я. Цифровые устройства: Учебное пособие для втузов. - СПб.: Политехника, 1996. - 885 с. на С. 461-472, например реализация на рис. 6.55.
В СПиОИ (фиг. 7) выходы блока разделения цветов (БРЦ) 4 соединены с входами блока сканирования изображения (БСИ) 5 для сканирования RAW через блок мультиплексоров (БMUX) 6 изображения по диагональной минимальной N-образной кривой Пеано, с сохранением исходной топологической и корреляционной связности двумерного изображения. Адресные входы блока мультиплесоров (БMUX) 6 подключены к выходам блока задания адресов (БЗА) 7. Информационный выход блока сканирования изображения (БСИ) 5 соединен с информационным входом канала обработки сигнала (КОС) 9. Канал обработки сигнала (КОС) 9 состоит из последовательно расположенных блока преобразования Харра (БПХ) 10, блока обработки сигналов (БОС) 11, причем блок обработки сигналов (БОС) 11 реализован на соответствующих фильтрах, полученных на основе обратной функции от свертки фильтрованного сигнала с ядром в виде оптической передаточной функции оптического элемента системы формирования изображений. Информационный выход блока обработки сигналов (БОС) 11 соединен с информационным входом блока коррекции сигнала (БКС) 12, выход которого через выход канала обработки сигнала (КОС) 9 подключен к информационному входу блока обратного преобразования Хаара (БОПХ) 13. Информационный выход блока обратного преобразования Хаара (БОПХ) 13 соединен с входом блока развертки (БР) 14, вход которого соединен с информационным входом блока демультиплексоров (БDMUX) 15, адресные входы которого соединены с информационными выходами блока задания адресов (БЗА) 7 блока сканирования изображения (БСИ) 5, а информационные выходы блока демультиплексоров (БDMUX) 15 соединены с информационными входами блока аналоговых запоминающих устройств (БАЗУ) 16 и далее через выходы блока развертки (БР) 14 с входами блока отображения (БО) 17.
Вход первого элемента задержки сигнала τ1 18 соединен с входами записи выходных аналоговых запоминающих устройств (АЗУ) цветовых фильтров 3 блока разделения цветов (БРЦ) 4, а выход первого элемента задержки сигнала τ1 18 подключен к входу установки в исходное состояние блока задания адресов (БЗА) 7, счетный вход которого через второй элемент задержки сигнала τ2 19 соединен с входом тактирования блока мультиплексоров (БMUX) 6 блока сканирования изображения (БСИ) 5. Выход окончания мультиплексирования (БMUX) 6 блока сканирования изображения (БСИ) 5 соединен с входом тактирования блока преобразования Хаара (БПХ) 10 и через третий элемент задержки сигнала τ3 20 с входом тактирования блока обработки сигнала (БОС) 11 и входом четвертого элемента задержки сигнала τ4 21. Выход четвертого элемента задержки сигнала τ4 21 соединен с входом тактирования блока коррекции сигнала (БКС) 12 и через пятый элемент задержки сигнала τ5 22 с входом тактирования обратного преобразования Хаара блока обратного преобразования Хаара (БОПХ) 13 и далее через шестой элемент задержки τ6 23 соединен с входом тактирования блока демультиплексоров (БDMX) 15. Выход шестого элемента задержки τ6 23 соединен также через седьмой элемент задержки τ7 24 с входом тактирования блока аналоговых запоминающих устройств (БАЗУ) 16 блока развертки (БР) 14 и далее через десятый элемент задержки сигнала τ10 27 со счетным входом блока задания адресов 7 блока сканирования изображения (БСИ) 5, а через восьмой элемент задержки сигнала τ8 25 с входом тактирования блока отображения (БО) 17 и далее через девятый элемент задержки сигнала τ9 26 с первым входом элемента "ИЛИ" 28. Второй вход элемента "ИЛИ" 28 соединен с входом начала сканирования 8 системы, а выход с входом первого элемента задержки сигнала τ1 18.
Рассмотрим реализацию способа на примере работы СПиОИ (фиг. 7).
Предварительно формируется матрица адресов для сканирования RAW изображения по диагональной минимальной N-образной кривой Пеано, которая размещается в блоке задания адреса (БЗА) 7. Для этого "измельчается" изображение путем его представления плоскостью в координатах вращения (w), носителем которых является фасет - квадрат pFas в виде диагональной минимальной N-образной кривой Пеано с точкой этой плоскости  , имеющего свой центр (ху), со стороной 3р и площадью 9р, где p=0…N, при этом N задает сторону единичного квадрата, в который вкладывают габарит исходного изображения. Такое "измельчание" изображения продолжается до тех пор пока DBS - статистика асимптотически не сведется к гауссовскому распределению с нулевым средним и соответствующим среднеквадратическим отклонением.
, имеющего свой центр (ху), со стороной 3р и площадью 9р, где p=0…N, при этом N задает сторону единичного квадрата, в который вкладывают габарит исходного изображения. Такое "измельчание" изображения продолжается до тех пор пока DBS - статистика асимптотически не сведется к гауссовскому распределению с нулевым средним и соответствующим среднеквадратическим отклонением.
В блоке формирования изображений (БФИ) 1 используются датчики изображений (ДИ) 2, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветовых фильтров (ЦФ) 3, образующих блок разделения цветов (БРЦ) 4 для разделения множества цветов изображения цветовыми фильтрами 3 на R-, G- и B-компоненты в компоновке Байера, для последующей обработки по каждой компоненте в отдельности. Сигнал с соответствующего выхода блока разделения 4 сканируется блоком сканирования изображения (БСИ) 5 по закону диагональной минимальной N-образной кривой Пеано (фиг. 4, 5) с нормой L∞ (максимальная норма), обеспечивающая нахождение наибольшего количества соседних точек (фиг. 3). При этом сохраняется исходная топологическая и корреляционная связности двумерного изображения.
Адресные входы блока мультиплексоров (БMUX) 6 подключены к выходам блока задания адресов (БЗА) 7. По команде по входу начала сканирования 8 блока сканирования изображения (БСИ) 5 блок задания адресов (БЗА) 7 устанавливается в исходное состояние. Сигнал с выхода блока мультиплексоров (БMUX) 6 блока сканирования изображения (БСИ) 5 поступает на вход канала обработки сигнала (КОС) 9. На входе канала обработки сигнала (КОС) 9 его входной сигнал преобразуется в сигнал-изображение блоком преобразования Хаара (БПХ) 10. Далее полученный сигнал-изображение преобразования Хаара обрабатывается блоком обработки сигналов (БОС) 11, причем блок обработки сигналов (БОС) 11 реализован на соответствующем фильтре, полученном на основе обратной функции от свертки фильтрованного сигнала с ядром в виде оптической передаточной функции оптического элемента системы формирования изображений. Сигнал с выхода блока обработки сигнала (БОС) 11 канала обработки сигнала (КОС) 9 поступает в блок коррекции сигнала (БКС) 12 и далее в блок обратного преобразования Хаара (БОПХ) 13, где преобразуется в сигнал-оригинал по сигналу окончания коррекции сигнала с выхода блока коррекции сигнала (БКС) 12. Восстановленный сигнал поступает на развертку блоком развертки (БР) 14 через блок демодуляторов (БDMUX) 15 по адресу, установленному по адресному входу с выхода блока задания адреса (БЗА) 7, и поступает по информационным входа для записи в блок аналоговых запоминающих устройств (БАЗУ) 16 и далее в блок отображения (БО) 17, где формируется совместное изображение в компоновке Байера от цветов, выделенными для обработки цветными фильтрами (ЦФ) 3 блока разделения цветов (БРЦ) 4.
В СПиОИ для синхронизации последовательности обработки информационного сигнала от обрабатываемого изображения формируются на элементах задержки сигнала сигналы стробирования для каждого блока обработки сигнала. Все элементы задержки сигнала τ1 18 - τ10 27 могут быть объединены в единый блок управления и выбираются равными времени срабатывания блока, к входу которого они подключены, для надежного срабатывания данного блока и надежного установления сигнала на его выходе. Так сигнал записи аналоговых запоминающих устройств (АЗУ) цветовых фильтров (ЦФ) 3 через первый элемент задержки сигнала τ1 18 устанавливает в начальное состояние сканирования блок задания адреса (БЗА) 7, а счетный вход блока задания адресов (БЗА) 7 через второй элемент задержки сигнала τ2 19 стробирует блок мультиплексоров (БMUX) 6. Сигнал с выхода окончания переключения блока мультиплексоров БMUX 6 стробирует блок преобразования Хаара 10 и через третий элемент задержки сигнала τ3 20 стробирует блок обработки сигнала (БОС) 11 и далее через четвертый элемент задержки сигнала τ4 21 стробирует блок обработки сигнала (БКС) 12. Сигнал с выхода четвертого элемента задержки сигнала τ4 21 через пятый элемент задержки сигнала τ5 21 стробирует блок обратного преобразования Хаара (БОПХ) 13 и далее через шестой элемент задержки сигнала τ6 23 стробирует по входу стробирования работу блока демультиплексоров (БDMUX) 15. Сигнал с выхода шестого элемента задержки сигнала τ6 23 после задержки на седьмом элементе задержки τ7 24 записывает по входу записи в блок аналоговых запоминающих устройств (БАЗУ) 16 блока развертки (БР) 14 сигнал с выхода блока демультиплексоров (БDMUX) 15. Сигнал с выхода седьмого элемента задержки τ7 24 через десятый элемент задержки сигнала τ10 27 поступает на счетный вход блока задания адреса (БЗА) 7 и переводит на последующий адрес для сканирования RAW сигнала через блок мультиплексоров БMUX 6 изображения по диагональной минимальной N-образной кривой Пеано, а также и адрес развертки блоком развертки (БР) 14. Через восьмой элемент задержки сигнала τ8 25 стробирует блок отображения (БО) 17 и через девятый элемент задержки сигнала τ9 26 и первый вход элемента "ИЛИ" 28 данный сигнал записывает по входу записи в выходные аналоговые запоминающие устройства (АЗУ) выходные сигналы цветовых фильтров (ЦФ) 3. Первоначальный запуск системы построения и обработки изображений осуществляется по входу начала сканирования 8 через второй вход элемента "ИЛИ" 28.
Таким образом, MNC создает многокоординатное пространство точки Q:
- две координаты х, у,
- координата вращения (w),
- координата вложенности точки в многокоординатном пространстве Q,
- координата размера граней фасета pFas,
- координата вложений обрабатываемой точки из Op-1 в Qp,
- адрес хранения  в памяти вычислителя Fp.
в памяти вычислителя Fp.
Важным преимуществом представляемого способа является то, что в изображении по MNC (MNP), на базе начальной ячейки квадрат-образа (3×3=9) изображения при p=1, сформированному по заданному критерию релевантности (т.е. по информационной ценности для наблюдателя) в плоскости изображения, выполняют в форме топологически оптимальных управляемых вложений фасета квадрат-образа pFas по параметру p=1…10 по MNC. Причем "измельчание" изображения на этапе сканирования осуществляют до р=0 (0Fas), т.е. до пикселя, для которого DBS - статистика сканируемого ряда, погруженному в фазовое пространство изображения, сводится асимптотически к гауссовскому распределению с нулевым средним и соответствующим среднеквадратическим отклонением  что определяет возможность использования при фильтрации сканированного ряда фильтра Винера. Это определяет выбор способа сканирования и соответствующей развертки оптимальных с точки зрения его реализационной сложности и сохранения фрактальных и статистических свойств изображения при его преобразовании к одномерному виду.
что определяет возможность использования при фильтрации сканированного ряда фильтра Винера. Это определяет выбор способа сканирования и соответствующей развертки оптимальных с точки зрения его реализационной сложности и сохранения фрактальных и статистических свойств изображения при его преобразовании к одномерному виду.
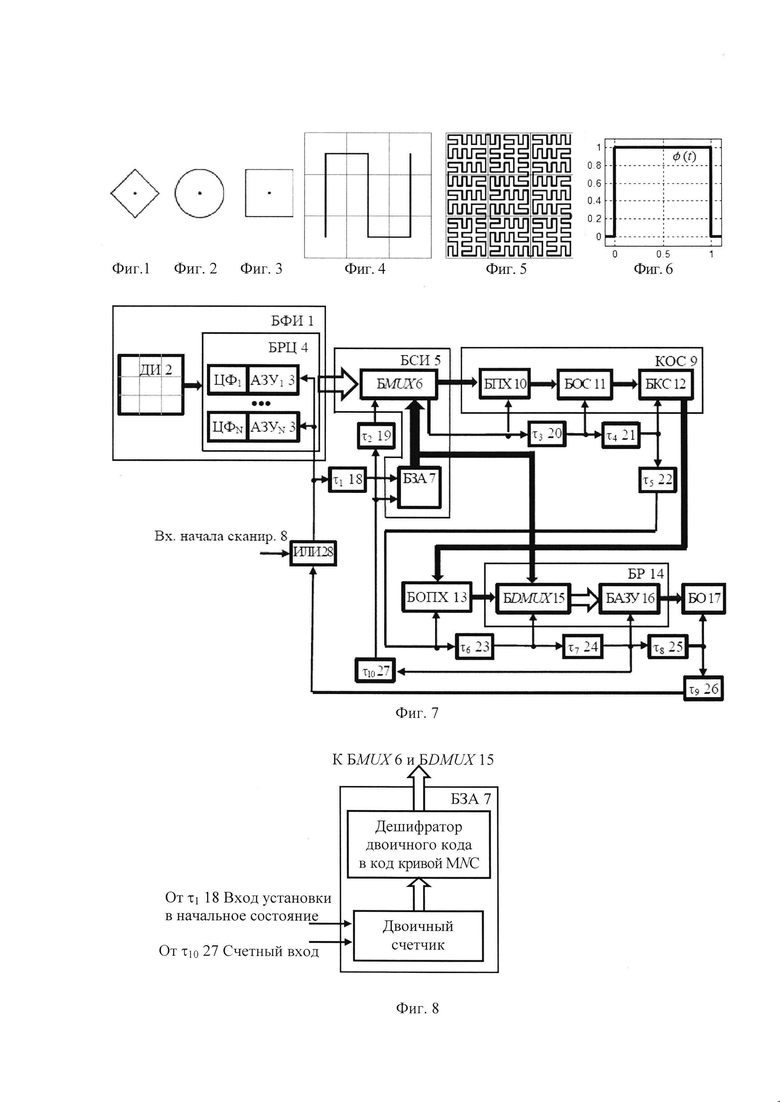
Изобретение относится к области построения и обработки первичного RAW изображения в цифровую форму. Технический результат заключается в повышении качества процедуры построения и обработки динамического изображения. Предлагается способ построения и обработки изображений на множестве цветов в компоновке Байера для оптической системы формирования изображений с использованием датчика изображений, имеющего множество элементов оптической системы, в виде пикселей для формирования необработанного деградированного изображения объекта (RAW), при этом каждый пиксель датчика изображений для каждой части данных изображения соответствующего множества цветов в компоновке Байера покрывается одним из множества фильтров цветов, включающий этапы разделения, обработки изображений, сканирования RAW изображения - R - G - В цветов, обработки цветов каждого пикселя, как если бы это были данные изображения одного цвета, этап рекурсии развертки обработанных данных изображения, этап восстановления каждого пикселя цветов для изображения в компоновке Байера. 2 н.п. ф-лы, 8 ил.
1. Способ построения и обработки изображений на множестве цветов в компоновке Байера для оптической системы формирования изображений с использованием датчика изображений, имеющего множество элементов оптической системы, в виде пикселей для формирования необработанного деградированного изображения объекта (RAW), при этом каждый пиксель датчика изображений для каждой части данных изображения соответствующего множества цветов в компоновке Байера покрывается одним из множества фильтров цветов, включающий:
- этап разделения, на котором разделяют данные изображения множества цветов множеством цветных фильтров на множество изображения соответствующих - R - G - B цветов;
- этап обработки изображений, на котором последовательно выполняют восстановление с помощью фильтра для каждой части данных изображения соответствующего множества цветов в компоновке Байера, разделенных на этапе разделения, с использованием множества соответствующих средств обработки изображений, после чего осуществляют коррекцию обработки изображения, отличающийся тем, что дополнительно содержит
- этап минимального N-образного сканирования (МNС) RAW изображения - R - G - B цветов, прошедшего через оптическую систему формирования изображений;
- этап обработки цветов каждого пикселя для данных изображения, подвергнутых обработке восстановления, выполняется посредством использования данных изображения множества цветов, как если бы это были данные изображения одного цвета;
- этап минимальной N-образной рекурсивной развертки (MNP) обработанных данных изображения;
- этап восстановления каждого пикселя цветов для изображения в компоновке Байера;
- на начальном этапе формирования минимального N-образного сканирования (MNC) единичный квадрат-образ (К01) со стороной 1 обрабатываемого изображения делится на девять конгруэнтных подквадратов и соответствующий единичный отрезок [0;1] (О01) также делится на девять равных отрезков и последовательно нумеруют подквадраты (К11; К12; К13; К14,…, К19), К11 сосед К12, К12 сосед К13 и К13 сосед К14 и т.д. и отрезок на 9 одинаковых частей (отрезки O11, O12, O13, O14,…, O19), выбирается начало кривой в левом нижнем углу, а конец в правом верхнем и определяют, какой отрезок в какой подквадрат попадает (при этом соседние отрезки переходят в соседние по стороне подквадраты), для каждого маленького отрезка определяют координаты точек подквадрата, в которые попадают его начало, конец и середина, далее каждый маленький отрезок делится на девять частей и проводятся аналогичные построения и т.д. до размера конгруэнтных подквадратов приблизительно, равного размеру пикселя, определяют конгруэнтные подквадраты равными пикселю при формировании минимальной начальной ячейки единичного квадрата-образа, сканирование на нулевом шаге начальной ячейки (направление рекурсии) стартует по минимальной N-образной диагональной кривой Пеано с 9-м фрактальным родом, от начала в левом нижнем углу единичного квадрата, начала отрезка, в правый верхний угол единичного квадрата-образа, конец отрезка, на первом шаге, по пути с направлением обхода вверх от начала единичного квадрата-образа и далее вверх, затем поворот вправо, вниз, вниз, вправо, вверх, вверх к концу единичного квадрата-образа; формируемая начальная ячейка (3×3=9) при р=1 является фасетом (pFas), где р - шаг рекурсии;
- минимальное N-образное сканирование (MNC) RAW изображения объекта осуществляют циклически по дискретному квадратному фасету, построенному на основе сканирования по правилам кривой, заполняющей плоскость (КЗП), с установкой начала и направления рекурсии, в виде минимальной N-образной диагональной кривой Пеано с 9-м фрактальным родом, для которой начальную ячейку сканирования (квадрат-образ) задают дискретным исходным единичным квадратом-образом, состоящим из девяти клеток (3×3=9) и имеющим четыре грани (стороны), начало и конец которого расположены в противоположных вершинах единичного квадрата-образа;
- обход подквадратов при минимальном N-образном сканировании (МNС) совершается путем переходов через операторы вращения (w) от одного к другому по принципу соседства по стороне, а переход через подквадрат осуществляют через его центр, далее устанавливается взаимно однозначное соответствие между отрезками и подквадратами, так чтобы соседние отрезки переходили через операторы вращения (w) в соседние (по стороне) подквадраты, т.е. O11 в К11, O12 в К12 и т.д., для построения дальнейших направлений рекурсий различают три типа операторов вращения (w) для обхода: оператор вращения w1 вверх как начальный (1Fas1) от начала единичного квадрата-образа, оператор вращения w2 как зеркальный от 1Fas1 в правую сторону (1Fas2), оператор вращения w3 как зеркальный от 1Fas2 вниз (1Fas3), а для получения последующего направления рекурсий применяют 2Fas (р=2, со стороной в 9 клеток, 9×9=81), где начало задает конец 1Fas и т.д.;
- на основе вышеуказанных операторов вращений w выполняют обход в последовательности с начальным движением в подквадрат вверх от 1Fas и далее: начало→w1→w1→w2→w3→w3→w2→w1→w1→конец, а формирование кривой сканирования осуществляется путем соединения центров подквадратов линией по порядку обхода, получившихся на втором делении, входя в подквадрат К11 в левом нижнем углу, а заканчивая в правом верхнем углу, строится кривая Пеано последовательным обходом всех подквадратов, получившихся на предыдущем делении, который остается тем же (К11→K12→K13→K14→…→K19) и доопределяет расположение образов точек отрезка и правило обхода в каждом подквадрате Кni с точностью до поворота подобно правилу обхода в исходном единичном квадрате К01, определяя кривую Пеано как фрактал;
- на этапе обработки осуществляют вейвлет-преобразование в виде преобразования Хаара над значением сигналов каждого пикселя от сосканированного множества значений состояний изображений датчика изображений, полученное при преобразовании Хаара значение каждого пикселя поступает на обработку изображений для восстановления с помощью фильтра в виде фильтра решения обратной задачи от оптической передаточной функции элемента оптической системы формирования RAW изображений, после чего осуществляют коррекцию обработки изображения и по окончании обработки изображения осуществляют ее обратное преобразование Хаара над множеством изображений;
- на этапе минимальной N-образной рекурсивной развертки (MNP) полученное восстановленное после обратного вейвлет-преобразования значение запоминается в блоке памяти вычислителя Fp по координате измерения номера хранения  согласованное со сканированием по закону MNP, представляя плоскость в координатах вращения (w), носителем которых является фасет-квадрат pFas с точкой этой плоскости
согласованное со сканированием по закону MNP, представляя плоскость в координатах вращения (w), носителем которых является фасет-квадрат pFas с точкой этой плоскости  , имеющий свой центр (ху), со стороной 3p и площадью 9p, где р=0…N, при этом N задает сторону единичного квадрата, в который вкладывают габарит исходного изображения; при р=0 (0Fas) точка вырождается в пиксель;
, имеющий свой центр (ху), со стороной 3p и площадью 9p, где р=0…N, при этом N задает сторону единичного квадрата, в который вкладывают габарит исходного изображения; при р=0 (0Fas) точка вырождается в пиксель;
при р>0 разбивается плоскость на 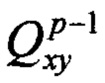 независимых точек (подквадратов);
независимых точек (подквадратов);
параметры x, у для Q - это его центр на плоскости;
в результате образуют многокоординатное пространство точки Q: две координаты декартового измерения (х, у), координата измерения вращения (w), координата измерения размера граней фасета pFas, координата измерения номера хранения  в памяти вычислителя Fp;
в памяти вычислителя Fp;
общим для этих координат является отображение декартовой плоскости в память при взаимно однозначном и непрерывном отображении точки  в память вычислителя Fp, причем переход на последующий фасет сканирования RAW изображения происходит после полного заполнения соответствующего фасета развертки блока в памяти вычислителя Fp, а окончание восстановления изображения осуществляется после заполнения всей площади развертки изображения.
в память вычислителя Fp, причем переход на последующий фасет сканирования RAW изображения происходит после полного заполнения соответствующего фасета развертки блока в памяти вычислителя Fp, а окончание восстановления изображения осуществляется после заполнения всей площади развертки изображения.
2. Система построения и обработки изображения, реализующая предложенный способ, которая содержит блок формирования изображений с использованием датчика изображений, имеющего множество пикселей, при этом каждый пиксель датчика изображений покрывается одним из множества цветовых фильтров, образующих блок разделения для разделения данных изображения множества цветов цветовых фильтров на данные изображения с аналоговыми запоминающими устройствами на выходе, соответствующих цветов цветовых фильтров в компоновке Байера, канал обработки сигнала, содержащий блок обработки сигналов, который реализован на соответствующем фильтре, полученном на основе обратной функции от свертки фильтрованного сигнала с ядром в виде оптической передаточной функции оптического элемента системы формирования изображений, блок коррекции сигнала, вход которого соединен с выходом блока обработки сигналов, а выход с выходом канала обработки сигнала, и блок отображения, выходы блока разделения цветов соединены с входами блока сканирования изображения, информационный выход которого соединен с информационным входом канала обработки сигнала, отличающаяся тем, что блок сканирования изображения состоит из блоков мультиплексоров и блока задания адреса, для сканирования RAW изображения по диагональной минимальной N-образной кривой Пеано, с сохранением исходной топологической и корреляционной связности двумерного изображения, в систему дополнительно введены вход начала сканирования, а в канал обработки сигнала дополнительно введен блок вейвлет-преобразования, на примере блока преобразования Харра, а также блок обратного преобразования Хаара, блок развертки, содержащий блок аналоговых демультиплексоров и блок аналоговых запоминающих устройств, и блок отображения, кроме этого, десять элементов задержки сигнала и элемент "ИЛИ", причем адресные входы блока мультиплесоров подключены к выходам блока задания адресов, информационный выход блока сканирования изображения соединен с информационным входом канала обработки сигнала, который состоит из последовательно расположенных блока преобразования Харра, блока обработки сигналов, информационный выход которого соединен с информационным входом блока коррекции сигнала, выход которого через выход канала обработки сигнала подключен к информационному входу блока обратного преобразования Хаара, информационный выход последнего соединен с входом блока развертки, вход которого соединен с информационным входом блока демультиплексоров, адресные входы которого соединены с информационными выходами блока задания адресов блока сканирования изображения, а информационные выходы блока демультиплексоров соединены с информационными входами блока аналоговых запоминающих устройств и далее через выходы блока развертки с входами блока отображения, вход первого элемента задержки сигнала соединен с входами записи выходных аналоговых запоминающих устройств (АЗУ) цветовых фильтров блока разделения цветов, а выход первого элемента задержки сигнала подключен к входу установки в исходное состояние блока задания адресов, счетный вход которого через второй элемент задержки сигнала с входом тактирования блока мультиплексоров блока сканирования изображения, выход окончания мультиплексирования блока сканирования изображения соединен с входом тактирования блока преобразования Хаара и через третий элемент задержки сигнала с входом тактирования блока обработки сигнала и входом четвертого элемента задержки сигнала, выход которого соединен с входом тактирования блока коррекции сигнала и через пятый элемент задержки сигнала с входом тактирования обратного преобразования Хаара блока обратного преобразования Хаара и далее через шестой элемент задержки соединен с входом тактирования блока демультиплексоров, выход шестого элемента задержки соединен также через седьмой элемент задержки с входом тактирования блока аналоговых запоминающих устройств блока развертки и далее через десятый элемент задержки сигнала со счетным входом блока задания адресов блока сканирования изображения, а через восьмой элемент задержки сигнала с входом тактирования блока отображения и далее через девятый элемент задержки сигнала с первым входом элемента "ИЛИ", второй вход которого соединен с входом начала сканирования системы, а выход с входом первого элемента задержки сигнала.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ УСТРОЙСТВА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2589489C2 |
| УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2557067C1 |

