Изобретение относится к области систем навигации летательных аппаратов (ЛА) и может быть использовано при согласовании систем координат постов оптико-электронной системы и бесплатформенной инерциальной навигационной системы (БИНС) вертолета в процессе полета.
Известен способ выставки БИНС ЛА корабельного базирования [1], использующий для совместной обработки методом фильтрации Калмана выходные сигналы БИНС ЛА и ИНС корабля базирования, соответствующие угловым скоростям, измеренным трехкомпонентными датчиками угловых скоростей (ДУС), установленными на ЛА и на корабле, при этом дополнительно измеряют значение курса ЛА относительно географического меридиана (шг) и осуществляют выставку в два этапа, на первом этапе измеряют линейные ускорения вдоль осей связанной системы координат корабля базирования и связанной системы координат ЛА, определяют координаты БИНС ЛА относительно ИНС корабля и осуществляют выставку по крену и тангажу путем согласования векторов перегрузок с использованием статистического фильтра Калмана второго порядка, при этом выставка может выполняться как в статическом положении корабля базирования, так и при его качке и маневре, на втором этапе осуществляют выставку в азимуте путем измерения и согласования векторов угловых скоростей корабля базирования и ЛА и измерения линейных ускорений вдоль осей связанных систем координат корабля базирования и ЛА, причем, если в течение 5-10 секунд отсутствует качка корабля с угловыми скоростями щx<2–3 град/с, выполняют маневр корабля типа «зигзаг» и производят обработку сигналов измерения, используя фильтр Калмана третьего порядка с размерностью вектора измерений, равной шести. Кроме того, для выставки БИНС ЛА, размещенного на корабле вертикально, по крену и тангажу при углах тангажа, близких к 90 градусам, и для исключения углов рассогласования между ИНС и БИНС, близких по тангажу к 90 градусам, интегральный блок датчиков БИНС, либо датчики в блоке, устанавливают с наклоном 45 градусов по тангажу, который затем учитывают в алгоритмах управления и навигации.
Недостатками известного способа являются его высокая трудоемкость, необходимость применения специального оборудования квалифицированным персоналом, трудности проведения в условиях корабля. Кроме того, этот способ не позволяет осуществлять совместную юстировку приборных систем координат постов оптико-электронной системы (ОЭС) и БИНС ЛА, а также компенсировать ошибки, которые возникают из-за различия изгибных деформаций корпуса ЛА в полете.
Наиболее близким к изобретению является способ динамической юстировки систем координат (СК) ЛА на основе их векторного согласования [2]. В данном способе осуществляется измерение трех ортогональных проекций как минимум двух неколлинеарных векторов в приборной и связанной СК и определение их взаимной ориентации по разности одноименных проекций. При движении ЛА в качестве векторов могут быть использованы данные об угловой скорости движения ЛА, определяемой с помощью датчиков угловых скоростей (ДУС), и измерение суммарного значения линейных ускорений ЛА и вектора силы тяжести Земли с помощью измерителей линейных ускорений (ИЛУ). Выбор векторов, по которым будет производиться согласование СК, может быть различным в зависимости от множества факторов, включая возможности ЛА, особенности оборудования и пр. В частности, это могут быть векторы ускорений и угловых скоростей; векторы скоростей, проинтегрированных скоростей; вектора, задающего угловое положение БИНС, а также варианты, включающие комбинации указанных векторов. При этом необходимо на каждом посту ОЭС устанавливать приборные инерциально-измерительные блоки (ИИБ), оборудованные ДУС и ИЛУ. Маневры носителя и не жесткость конструкции приводят к тому, что приборный ИИБ ОЭС движется относительно БИНС, что требует коррекции при сопоставлении измерений. Результаты измерений, как правило, подвергаются фильтрации Калмана [3]. Выбор используемых измерений в математической модели фильтрации Калмана во многом определяет и маневры ЛА, на которых будет происходить динамическая юстировка СК.
Результаты проведенных 45 летных экспериментов показали, что ошибка согласования осей систем координат составляет порядка 2 мрад. (7 – 8 угл. мин.) при времени выполнения маневров около 10 с.
Недостатком известного способа является то, что динамическая юстировка требует оснащения всех постов ОЭС ИИБ, что приводит к увеличению массогабаритных характеристик и стоимости ОЭС ЛА, а также, в некоторых случаях, невозможна в силу ограничений по габаритам.
Техническим результатом предлагаемого изобретения является повышение точности оценки углового рассогласования СК постов ОЭС и БИНС вертолета после выполнения процедуры согласования приборной и связанной систем координат при снижении массогабаритных характеристик.
Заявленный технический результат достигается посредством реализации способа динамической юстировки систем координат вертолета на основе их векторного согласования, заключающегося в измерении трех ортогональных проекций как минимум двух неколлинеарных векторов в приборной и связанной системах координат, определении их взаимной ориентации по разности одноименных проекций, отличающийся тем, что векторами, подлежащими согласованию, являются вектора линейной и угловой скорости вертолета, проекции которых на оси приборных систем координат постов оптико-электронной системы измеряют в результате независимой обработки потоков изображений, формируемых указанными системами, сопоставляют полученные результаты с информацией бесплатформенной инерциальной навигационной системы, при этом измерение ориентации указанных векторов производят не одновременно, измерение ориентации вектора линейной скорости осуществляют при выполнении горизонтального прямолинейного полета на небольшой высоте и отсутствии угловой скорости, а измерение ориентации вектора угловой скорости осуществляют при вращении вокруг вертикальной оси и отсутствии линейного перемещения вертолета.
Новыми существенными признаками изобретения являются:
- векторами, подлежащими согласованию, являются вектора линейной и угловой скорости вертолета, проекции которых на оси систем координат постов оптико-электронной системы измеряются в результате независимой обработки потоков изображений, формируемых указанными системами, после чего сопоставляют полученные результаты с информацией бесплатформенной инерциальной навигационной системы;
- измерение ориентации указанных векторов производится не одновременно, измерение ориентации вектора линейной скорости осуществляют при выполнении горизонтального прямолинейного полета на небольшой высоте и отсутствии угловой скорости, а измерение ориентации вектора угловой скорости осуществляют при вращении вокруг вертикальной оси и отсутствии линейного перемещения вертолета.
Новая совокупность существенных признаков в сочетании с общими известными обеспечивают решение технической проблемы с достижением заявленного технического результата, а именно, повышения точности оценки углового рассогласования СК постов ОЭС и БИНС вертолета после выполнения процедуры согласования приборной и связанной систем координат при снижении массогабаритных характеристик.
Использование единой совокупности существенных отличительных признаков в известных технических решениях не обнаружено, что характеризует соответствие рассматриваемого технического решения критериям «новизна» и «изобретательский уровень».
Далее заявленное изобретение будет описано по ссылкам на чертежи:
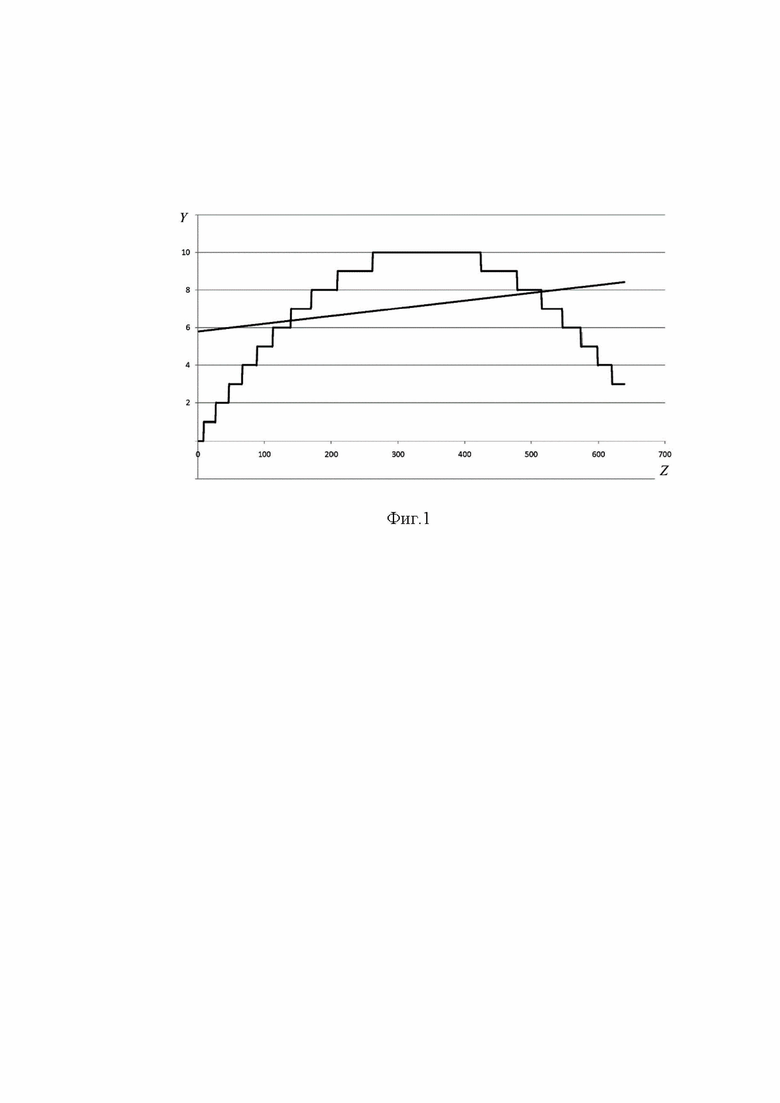
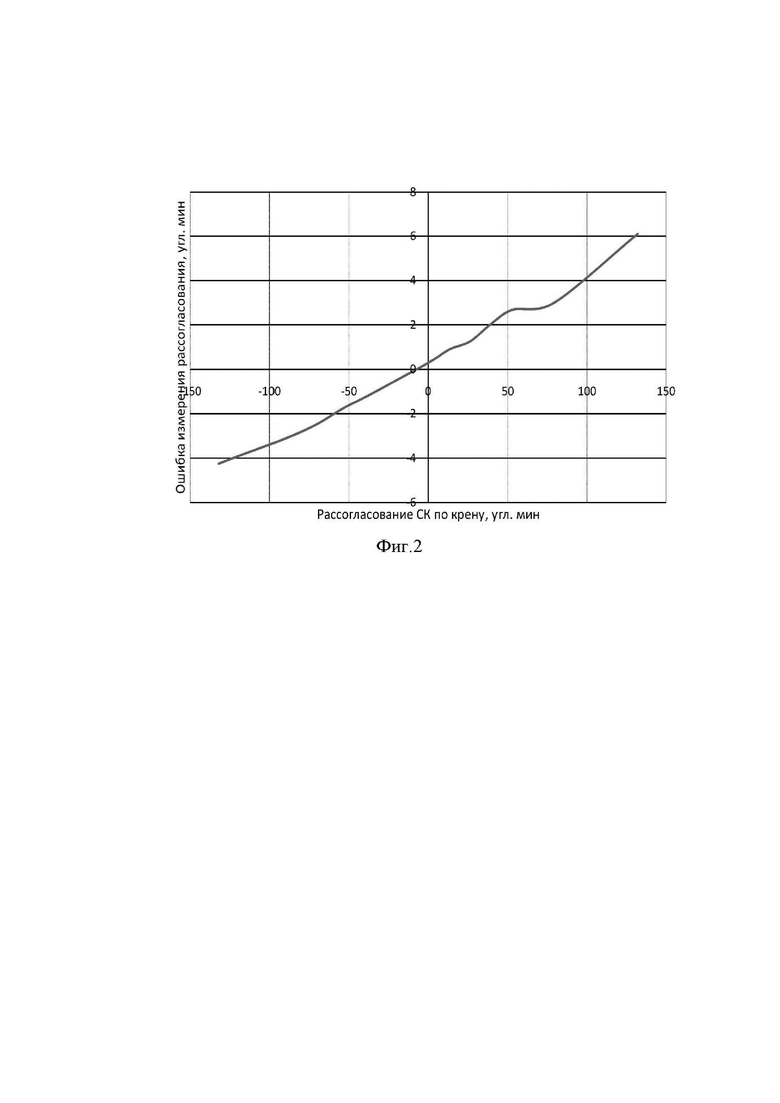
На фиг. 1 представлена аппроксимация гиперболы прямой линией при округлении измеряемых координат характерных точек до целых чисел.
На фиг. 2 приведена зависимость ошибки измерения рассогласования приборной СК относительно продольной оси БИНС от величины этого рассогласования.
На фиг. 3 представлена зависимость ошибки измерения рассогласования приборной СК относительно продольной оси БИНС от степени кривизны траектории сопровождаемой характерной точки.
Способ динамической юстировки систем координат вертолета реализуется следующим образом.
В рамках настоящей заявки определяют следующие системы координат:
1. Связанная система координат:
− начало координат связанной СК находится в центре масс вертолета;
− ось OX направлена вдоль строительной оси вертолета;
− ось OZ перпендикулярна плоскости симметрии вертолета и направлена в его правую часть;
− ось OY перпендикулярна плоскости ХОZ и дополняет СК до правой тройки.
2. Приборная система координат, связанная с полем зрения ОЭС:
− начало координат находится в точке пересечения главной оптической оси датчика изображений с фокальной плоскостью.
− оси приборной СК каждого поста ОЭС имеют направление аналогично связанной СК. В идеальном случае оси приборных СК коллинеарны осям связанной СК. Однако, в силу объективных причин, как правило, имеется некоторое рассогласование между направлениями осей.
3. Система координат кадрового снимка или экранная СК, связанная с датчиком изображения:
− центр изображения, соответствующий главной оптической оси датчика и направлению OX приборной СК, принимается за начало координат. Ось OZ направлена вправо, ось OY – вверх.
Для реализации заявленного способа с целью определения направления вектора линейной скорости вертолета совершают прямолинейный горизонтальный полет на относительно небольшой высоте, причем в поле зрения ОЭС с тепловизионным или телевизионным каналом находится подстилающая поверхность (ПП).
Если на изображении ПП имеются характерные точки, которые могут быть детектированы, например, с помощью известных детекторов, в частности, Моравека, Харриса, Форстнера, Ши-Томаси-Кэнэда и др., то такие точки при стабилизированном в инерциальном пространстве поле зрении ОЭС в каждый момент времени двигаются на изображении по лучам, расходящимся из одной точки ‒ точки схождения. Эта точка является пересечением вектора скорости вертолета с фокальными плоскостями датчиков изображений независимо от их ориентации в пространстве.
Положение точки схождения на изображении соответствует направлению вектора скорости вертолета в приборной СК (связанной с полем зрения ОЭС). Для определения координат точки схождения необходимо сопровождать хотя бы две характерные точки. Исходя из предположения, что вектор линейной скорости совпадает с направлением строительной оси вертолета (углы атаки и скольжения равны нулю), то положение рассматриваемой точки схождения относительно центра изображения определяет рассогласование приборных систем координат относительно вертикальной и поперечной осей связанной СК (т.е. величины рассогласования по углам курса и тангажа) при условии отсутствия крена.
Таким образом, направление вектора линейной скорости вертолета определяют путем детектирования траекторий движения, по край ней мере, двух выделенных точек на изображении подстилающей поверхности земли (ПП).
Для определения параметров таких траекторий и положения точки схождения может быть использован метод двух засечек на вложенных интервалах времени с усреднением, известный из источников [5, 6].
В предпочтительном варианте реализации предлагаемого способа, используется подход, основанный на методах оптимального оценивания, заключающийся в следующем.
При прямолинейном полете и компенсации стабилизационных колебаний вертолета системой стабилизации ОЭС, как уже отмечалось, характерные точки ПП на изображении будут двигаться по лучам, исходящим из точки схождения, положение которой соответствует направлению вектора скорости, причем траектории точек могут регистрироваться и одновременно, и последовательно, а положение точки схождения должно определяться после набора заданного количества таких точек, что повышает точность определения ее координат. Хотя формально для нахождения положения точки схождения достаточно сопровождать лишь две точки. В процессе сопровождения характерных точек могут наблюдаться ошибки определения текущего положения точек вследствие стохастического характера работы алгоритмов в условиях изменения локальных контрастов и масштабов фрагментов изображения в процессе сближения вертолета с сопровождаемыми участками ПП. Таким образом, полученные при сопровождении какой-либо точки координаты, вообще говоря, не лежат на одной прямой. Для оценки ее параметров необходимо аппроксимировать полученные координаты прямой линией. Считая, что ошибки измерения текущих координат точки имеют нулевое математическое ожидание, а сами измерения некоррелированные, аппроксимацию можно осуществить с помощью метода наименьших квадратов [10]. Учитывая, что траектории движения сопровождаемых точек могут иметь всевозможные направления в экранной СК, в том числе и вертикальное, уравнение прямой необходимо задать в общем виде, которое может быть сведено к следующему:
Пусть за время движения точки по полю зрения ОЭС произведено n измерений ее координат (y1, z1), (y2, z2),…, (yn, zn). Тогда может быть составлена система линейных уравнений относительно коэффициентов уравнения прямой:
Метод наименьших квадратов состоит в минимизации следующей суммы:
Взяв производные по параметрам N и M и приравняв их к нулю, получим систему
Отсюда находим значения коэффициентов, задающих прямую:

Если взять произвольную пару прямых с номерами j и k, то точка их пересечения, т.е. оценка положения точки схождения, определяется на основании решения системы
Координаты точки схождения Z, Y, найденные с использованием j-й и k-й траекторий, удобно обозначить соответственно zjk, yjk с индексным указанием рассматриваемых прямых. Очевидно,

Для уменьшения погрешности определения положения точки схождения (Y, Z) следует произвести усреднение полученных координат по всем парам прямых. Если таких прямых m, то количество пар составляет 


где 
При отсутствии рассогласования приборной и связанной СК относительно оси OX (обозначим через Дц (X)), т.е. при Дц(X) = 0), полученные величины 
Для определения рассогласования приборной СК относительно продольной оси связанной СК (т.е. по углу крена) совершают специальный маневр – вращение вертолета, в результате которого определяют ориентацию вектора угловой скорости вращения: параметры углового вращения формируются в БИНС, а оценку направления указанного вектора относительно датчиков изображений производится в результате обработки видеопотока в каждом посту ОЭС. При этом, предполагается отсутствие линейного перемещения аппарата, что при наличии РЛС на борту вертолета обеспечивается с высокой точностью путем идентификации и оценки дальностей до элементов аэродромной инфраструктуры при вращении вертолета [7-9].
При совершении вертолетом на небольшой высоте вращательного движения вокруг вертикальной оси OY связанной СК в поле зрения ОЭС находится ПП и элементы инфраструктуры аэродрома. Предполагается, что поле зрения ОЭС стабилизировано и в течение всего маневра положение центра масс вертолета и направление вектора угловой скорости не изменяется. На изображении ПП и инфраструктуры аэродрома выделенные характерные точки при вращении вертолета будут перемещаться по экрану ОЭС по разным траекториям. Требуется по результатам идентификации траекторий характерных точек изображений ПП определить направление вектора угловой скорости вертолета в приборной СК ОЭС.
С целью определения направления вектора угловой скорости вертолета предполагается стабильное положение начал всех приборных систем координат вращающегося вертолета относительно местности. Прецизионное выполнение этого требования гарантируется путем радиолокационного дальнометрирования элементов инфраструктуры и управления положения вертолета [7–9]. При вращении вертолета анализ возможных траекторий движения изображения точек ПП по экрану показывает, что точки, находящиеся в плоскости, перпендикулярной вектору угловой скорости, и проходящей через главную точку объектива, будут двигаться по прямой.
Траектории остальных точек будут представлять собой кривые, характер которых определяют на основе принципа обращения движения, т.е. представляют, что не вертолет вращается относительно оси OY, а ПП вращается вокруг вертолета.
Тогда любая прямая, соединяющая точку на ПП и вектор угловой скорости, формирует относительно оси вращения коническую поверхность. Для прямых, пересекающих матричное фотоприемное устройство (МФПУ), фокальная плоскость ОЭС по сути является фрагментом секущей плоскости конуса, а угол между осью конуса, т.е. между вектором угловой скорости и секущей плоскостью, – углом отклонения приборной СК от связанной СК по углу тангажа. Поскольку этот угол, как правило, мал, то характерные точки ПП, за исключением точек, лежащих в упомянутой выше плоскости, будут двигаться на изображении по гиперболам. Точки могут двигаться по разным гиперболам, но все гиперболы имеют общий центр, причем при наличии рассогласования приборной и связанной СК по углу тангажа центр будет соответственно перемещаться по вертикали. Наличие бокового смещения ОЭС относительно строительной горизонтали фюзеляжа будет приводить к смещению центра гипербол в боковом направлении. Если есть смещение по крену, то гиперболы будут повернуты относительно приборной СК. Таким образом, в общем случае в уравнениях гипербол будут присутствовать все члены, и любое уравнение может быть сведено к следующему виду:

Чтобы определить отклонение приборной СК от связанной по углам тангажа и крена, достаточно вычислить коэффициенты уравнения (4) и найти такую СК (O1Z1Y1), в которой уравнение гиперболы имеет канонический вид.
При этом приводить уравнение к каноническому виду нет необходимости: положение искомой СК по вертикальной оси приборной СК определяет отклонение по углу тангажа, а угол поворота соответствует отклонению по углу крена. Положение начала координат новой СК (z0, y0) может быть найдено с помощью решения системы линейных уравнений [11]:
Угол поворота – с помощью выражения
Для определения коэффициентов уравнения (4) определяют координаты сопровождаемой характерной точки не менее чем 5 раз за время ее движения по полю зрения ОЭС. Если количество измерений более пяти, то коэффициенты могут быть найдены с помощью метода наименьших квадратов [10].
Пусть за время движения точки по полю зрения ОЭС произведено n ≥ 6 измерений ее координат (z1, y1), (z2, y2),…, (zn, yn).
Тогда может быть составлена система линейных уравнений относительно коэффициентов уравнения гиперболы:
Обозначим через M матрицу, составленную из соответствующих измерений:
а через f – вектор, компонентами которого являются коэффициенты уравнения гиперболы:

Тогда система (7) примет вид Mf = I, где I – вектор размерности n, все элементы которого равны единице.
Можно считать все измерения равноточными и некоррелированными. Необходимо найти минимум суммы квадратов разностей левой и правой частей этого уравнения, т.е. 
Дифференцируя эту функцию по вектору параметров и приравняв производную к нулю, получаем следующее матричное уравнение:

Выполнив умножение матриц, получаем (8) в виде
В скалярном виде уравнение (8) имеет вид системы линейных уравнений:
Здесь все суммирования производятся для i = 

где д – угловое разрешение соответствующего канала ОЭС.
За время вращения вертолета вокруг оси может быть произведено детектирование и сопровождение значительного количества точек на ПП и элементах инфраструктуры аэродрома. Для каждой точки могут быть найдены параметры траектории на экране с помощью изложенного метода, и оценку параметров α и β целесообразно определять с помощью усреднения.
Необходимо отметить, что область определения гипербол рассматриваемого типа расположена от -∞ до ∞, а наблюдаемая часть траектории сопровождаемой точки представляет собой лишь малый фрагмент. Кроме того, наблюдаемые гиперболы имеют очень малую кривизну, особенно для ОЭС с узким полем зрения, и на непрерывную кривую наложен шум дискретизации, связанный с матричной структурой МФПУ, т.е. измеряемые координаты траектории сопровождаемой точки округлены до целых чисел. Перечисленные факторы могут приводить к тому, что искомые коэффициенты в уравнении гипербол будут определяться с недостаточной точностью. Это в свою очередь может привести к возникновению недопустимо больших ошибок при определении рассогласования СК относительно оси OX.
В связи с этим, в рамках реализации заявленного способа, в предпочтительном варианте его осуществления, применяется альтернативный подход к определению рассогласования систем координат относительно продольной оси связанной СК.
С этой целью, производят аппроксимацию наблюдаемых траекторий сопровождаемых точек прямыми линиями. Если ОЭС не имеет бокового смещения относительно строительной оси вертолета, то гиперболы на экране будут симметричны относительно центральной вертикали. В этом случае угол наклона получаемых прямых будет соответствовать углу рассогласования СК относительно оси OX. Если есть боковое смещение, то, как указывалось выше, это приведет к смещению центра гипербол в боковом направлении и аппроксимирующие прямые будут иметь наклон, который должен быть скомпенсирован.
Проведя преобразования, аналогичные рассмотренным выше, можно получить соответствующие выражения для определения параметров аппроксимирующих прямых. Поскольку траектории сопровождаемых точек в данном случае в основном близки к горизонтали, то уравнение прямой можно записать в виде

Тогда если имеется n наблюдений сопровождаемой точки, т.е. зафиксированы координаты 
Нетрудно показать, что параметры a и b принимают следующие значения:

Угол наклона прямой в экранной СК определяется выражением

Если есть боковое смещение L датчика изображения ОЭС относительно строительной оси вертолета или сам вертолет в процессе вращения имел боковую составляющую вектора линейной скорости, то центр гипербол сместится в боковом направлении на соответствующую величину ΔZ:
где R – расстояние от датчика ОЭС до сопровождаемой точки, Δφ – угловое разрешение датчика изображения. В этом случае во избежание ошибки определения рассогласования относительно оси OX необходимо брать для аппроксимации прямой часть гиперболы, симметричную относительно вычисленного положения ее центра. При этом появляется необходимость измерения дальности до сопровождаемой точки, что обеспечивается в результате обработки информации РЛС или лазерным дальнометрированием [7].
Анализ точности метода определения ориентации вектора линейной скорости вертолета.
Получим аналитические выражения для среднеквадратичного отклонения (СКО) определения углов ориентации вектора линейной скорости вертолета изложенным выше способом.
Для получения аналитических выражений будем считать измерения координат сопровождаемой характерной точки равноточными с СКО σ на всей траектории ее наблюдения, которая аппроксимируется прямой, описываемой уравнением 
где T = (I, Z) – матрица размерности n×2, n – количество измерений, I – единичный вектор, Z – вектор горизонтальных координат измерений, M – корреляционная матрица ошибок измерения. Поскольку измерения координат сопровождаемой точки в каждый момент времени независимы, то корреляционная матрица (12) диагональна. Тогда
Найдем входящие в (13) выражения для 
Для получения аналитических выражений будем считать, что промежутки между измеряемыми горизонтальными координатами сопровождаемой точки одинаковы, т.е. zi – zi–1 = Δz для ∀i. Такая последовательность может быть сформирована с помощью некоторого прореживания измерений. Поскольку ошибки определения угла ориентации прямой не зависят от положения начального измерения по z, можно сдвинуть начало координат экранной СК так, чтобы z1 = Δz. Тогда
Используя выражение
находим

Согласно предыдущим рассуждениям, можно получить
Относительно координаты z0 = z1 – Δz запишем (15) в виде
Аналогично можно получить выражение для коэффициента корреляции:
Сместим начало координат так, чтобы абсцисса z = 0 находилась в середине траектории сопровождаемой точки. В этом случае в выражениях (16), (17) числитель дроби равен нулю, и таким образом коэффициент корреляции rab = 0, а 


где ΔL – расстояние от середины траектории до ожидаемого положения точки схождения. По сути,

Если при нахождении положения точки схождения было выделено не менее 10 характерных точек, то ошибки определения ее координат будут на порядок меньше ошибок выделения характерных точек, т.е. меньше углового разрешения ОЭС.
Результаты моделирования. Моделирование проводилось для ОЭС с полем зрения 40×30º и МФПУ 640×480 пикселов. При этом предполагалось, что дисторсия объектива, если она присутствует, программно скомпенсирована. Сначала было проведено исследование возможности использования метода, в котором определяются все коэффициенты уравнения гиперболы. Для этого синтезировалась траектория сопровождаемой точки в нижней части экрана, т.е. траектории с возможно большей кривизной с заданными величинами угла поворота и отклонения центра гиперболы по вертикали от центра экрана. Для значительного количества наблюдений (несколько сот) координаты фиксировались с высокой точностью. Затем зафиксированные координаты загружались в программу определения коэффициентов гиперболы, ее центра и угла поворота в соответствии с (9), которые сопоставлялись с заданными при формировании гиперболы. Действия производились для одной и той же траектории, но при этом координаты округлялись до все меньшего числа знаков после запятой, вплоть до округления до целого числа. В качестве примера в таблице 1 приведены задаваемые и определяемые коэффициенты уравнения гиперболы A, B, C, D, E и оценки угла поворота гиперболы α (в градусах) от количества знаков после запятой координат сопровождаемой точки для случая, когда задаваемый угол поворота гиперболы равен нулю.
Таблица 1
В результате можно сделать вывод о том, что для успешного применения рассмотренного метода необходимо увеличить точность определения координат сопровождаемой точки, по крайней мере, на два порядка, что в настоящее время невозможно. Аналогичное моделирование было проведено с применением альтернативного метода определения рассогласования СК по углу крена на основе аппроксимации наблюдаемых траекторий сопровождаемых точек прямыми линиями с помощью (10), (11). В таблице 2 приведена оценка угла поворота гиперболы с помощью аппроксимации от количества знаков после запятой. Была задана гипербола со следующими параметрами: A= 0,01. B = 0,001. C = –0,025. D = –3,44. E = 59,68. z0 = 320. y0 = 240. α = 13,2222'.
Таблица 2
На фиг. 1 представлена указанная гипербола при округлении вертикальной координаты до целых значений и ее аппроксимация прямой линией (за начало координат в данном примере выбран левый нижний угол изображения). Для наглядности масштаб по оси OY во много раз больше, чем по оси OZ. Из таблицы 2 и фиг. 1 очевидно, что данный метод намного более устойчив к уменьшению точности измерения координат сопровождаемой точки. Дальнейшее моделирование проводилось для округления измеряемых координат до целых значений.
На фиг. 2 приведена зависимость ошибки измерения рассогласования по углу крена от величины этого рассогласования, т.е. ошибка измерения угла поворота рассмотренной выше гиперболы от этого угла. При этом относительная ошибка в диапазоне измерений от 10 до 130' не превышала 4 – 6 %.
Было проведено моделирование для определения зависимости ошибки измерения рассогласования по углу крена от степени кривизны траектории сопровождаемой точки. Под кривизной будем понимать отношение максимального расстояния между кривой и хордой, соединяющей ее концы, к длине этой хорды. В силу малости углов для определения степени кривизны k используем выражение

где (xi, yi) 
На фиг. 3 представлена зависимость рассогласования приборной СК относительно продольной оси БИНС от степени кривизны траектории сопровождаемой характерной точки, когда рассогласование СК равно нулю.
Полученная зависимость носит линейный характер. Отсюда очевидно, что при наборе заданного количества траекторий необходимо усреднение результатов измерения за время всего маневра. При этом углам рассогласования, найденным по траекториям с меньшей кривизной, надо придавать больший вес. Если было проведено сопровождение m точек на ПП, то для определения среднего угла наклона траекторий 
где q – коэффициент, величина которого может быть выбрана в результате моделирования с реальной аппаратурой.
Рассматривая влияние возмущающих факторов на точность согласования СК вертолета, необходимо отметить, что идеально выполнить маневр (прямолинейный полет или вращение) невозможно независимо от того, выполняется маневр автопилотом или летчиком вручную.
При выполнении маневра на вертолет будут действовать возмущающие воздействия, приводящие к появлению стабилизационных колебаний, которые будут проявляться в виде отклонений вектора угловой или линейной скорости от среднего положения. При отсутствии стабилизации поля зрения ОЭС в экранной СК это будет проявляться в виде отклонений сопровождаемых точек от идеальных траекторий. Такие отклонения могут быть скомпенсированы с помощью информации, получаемой из БИНС. Для этого необходимо определять приращения углов ориентации вертолета по углам крена, тангажа и курса за время, прошедшее между моментами формирования предыдущего и текущего изображений, и пересчитывать координаты характерной точки в экранной СК, компенсируя возмущения.
Однако реальные временные задержки, связанные с формированием и передачей информации, а также неопределенность моментов обновления параметров могут приводить к недопустимо большим ошибкам при построении траекторий точек. Поэтому для компенсации возмущающих воздействий необходимо использовать возможности стабилизации поля зрения ОЭС. В этом случае погрешность стабилизации изображений существенно меньше углового разрешения датчиков ОЭС. В такой постановке компенсация стабилизационных колебаний сводится к необходимости определения основных требований к выполнению маневров.
Для определения направления линейной скорости и оценок поправок приборной СК относительно боковой и вертикальной осей БИНС вертолет должен:
− двигаться прямолинейно под управлением автопилота;
− продолжительность полета по прямой должна быть не менее нескольких периодов стабилизационных колебаний (зависит от характеристик вертолета);
− поле зрения ОЭС стабилизировано;
− должно быть детектировано и построено траекторий характерных точек на изображении ПП не менее заданного количества (порядка 8 – 10).
Ошибки определения положения точки схождения тем меньше, чем длиннее траектории сопровождаемых характерных точек. При этом время выполнения маневра желательно минимизировать. При длине траектории, соответствующей пересечению нижней четверти поля зрения ОЭС, для характерных размеров матриц фотоприемного устройства и возможностей алгоритмов детектирования и прослеживания σприв лежит в диапазоне σприв = (1÷1,5) σ. Используя тригонометрические тождества, можно показать, что время t, необходимое для формирования такой траектории определяется выражением
где ц – размер поля зрения по вертикали, H – высота полета, V – скорость полета ЛА. Например, для H = 50 м, V = 60 м/с, ц = 18° t = 5,3 с.
Для оценки поправки приборной СК относительно продольной оси БИНС (по крену) вертолету необходимо:
− совершить вращение на месте под управлением автопилота;
− продолжительность вращения должна быть не менее нескольких периодов стабилизационных колебаний (зависит от характеристик вертолета);
− поле зрения ОЭС стабилизировано по углу крена и тангажа;
− должно быть детектировано и построено траекторий характерных точек на ПП не менее заданного количества (порядка 8 – 10).
При выполнении указанных условий можно ожидать, что ошибки определения направления векторов линейной и угловой скоростей не будут превышать углового разрешения ОЭС, а время выполнения каждого маневра не будет превышать 5 – 7 с.
При определении рассогласования приборных СК ОЭС со связанной СК нужно учесть, что БИНС выдает параметры углов крена, тангажа и курса с заданной частотой, а для определения направления движения по экрану ОЭС сопровождаемых характерных точек изображения ПП необходимо некоторое время. При выполнении маневра на вертолет будут действовать возмущающие силы, приводящие к появлению упомянутых стабилизационных колебаний.
Поэтому для определения искомой угловой поправки следует проводить усреднение выдаваемых БИНС значений крена за время выполнения маневра. Этот усредненный крен нужно сопоставить со средним углом наклона прямых (21) с учетом кривизны (20), аппроксимирующих траектории точек, сопровождаемых на экране ОЭС за все время выполнения маневра. Разность указанных величин определяет поправку приборной СК относительно продольной оси БИНС Δγ:
где γi – текущее значение крена, получаемое из БИНС, Δt – период выдачи информации из БИНС, T – время выполнения маневра, n – количество периодов за время T, m – количество построенных траекторий характерных точек на ПП, 
Комплексная обработка сигналов БИНС и видеоинформации ОЭС для векторного согласования СК относительно боковой и вертикальной осей связанной СК заключается в следующем. Положение точки схождения в приборной СК 
Навигационные параметры выдаются БИНС в нормальной подвижной СК (НПСК). Поэтому с момента начала и до окончания прослеживания траекторий характерных точек информация, выдаваемая БИНС, преобразуется следующим образом. Определяются проекции вектора путевой скорости, задаваемого текущими значениями вертикальной VH, северной VN и восточной VE составляющих, на оси связанной СК (ССК) с помощью выражений [15]:
где Ψ – курс, ϑ –тангаж, γ –крен. Полученные значения проекций вектора путевой скорости в связанной СК преобразуются в вектор направления R (у-пеленг phiY и z-пеленг phiZ) с помощью выражений:

Значения у-пеленга и z-пеленга в связанной СК усредняются на время сопровождения характерных точек. Соответствующие разности между проекциями скорректированного положения точки схождения на вертикальную и боковую оси приборной СК, найденные с помощью (23), и усредненными значениями пеленгов определяют поправки приборной СК относительно боковой Δϑ и вертикальной осей ΔΨ БИНС:
где 

Проведенные экспериментально-теоретические исследования позволяют сделать вывод, что предложенный способ за счет оптических средств определения направления векторов скоростей и усреднения информации БИНС за время маневров позволяют уменьшить ошибки согласования СК на 25 – 40 % в зависимости от разрешающей способности датчиков изображений.
Таким образом, в результате реализации предложенного способа оказывается возможным повысить точность оценки углового рассогласования СК постов ОЭС и БИНС вертолета после выполнения процедуры согласования приборной и связанной систем координат при снижении массогабаритных характеристик и стоимости ОЭС.
Источники информации
1. Патент РФ на изобретение № 2635398.
2. Lipton A.H. Alignment of Inertial Systems on a Moving Base. Cambridge: Electronics Research Center, 1967.
3. Schneider A. M. Kalman Filter Formulation for Transfer Alignment of Strapdown Inertial Units // J. of the Institute of Navigation. 1983. V. 30. № 1.
4. Бельский А.Б. Основные задачи и требования к бортовым ОЭС для современных и перспективных вертолетов // Тр. XXV Международная научно-техническая. конференция и школа по фотоэлектронике и приборам ночного видения. Т. 1. М.: ОФСЕТ МОСКВА, 2018. С. 21-23.
5. Мужичек С.М., Обросов К.В., Ким В.Я. и др. Определение направления полета по сигналам оптико-электронной системы переднего обзора // Вестн. компьютерных и информационных технологий. 2013. № 5. С. 8–14.
6. Патент РФ на изобретение № 2556286.
7. Бобин А.В., Лисицын В.М., Обросов К.В., Сикачева М.И. Доплеровская селекция наземных объектов, движущихся со случайными изменениями ориентации вектора скорости // Изв. РАН. ТиСУ. 2021. № 5. С. 143–151.
8. Клочко В.К. 3D-радиовидение на базе бортовой доплеровской РЛС // Ракетно-космическое приборостроение и информационные системы. 2015. Т. 2. Вып. 2. С. 53-57.
9. Денисов П.В., Зайцев С.Э., Костюк Е.А. и др. Вопросы дешифрирования радиолокационных снимков при радиовидении // Радиотехника. 2014. № 7. С. 7-14.
10. Тихонов В.И. Статистическая радиотехника. 2-е изд. перераб. и доп. М.: Радио и связь, 1982. 624 с.
11. Беклемишев Д.В. Курс аналитической геометрии и линейной алгебры. М.: Наука, 1971. 328 с.
12. Harris C.G., Stephens M.J. Combined Corner and Edge Detector // Proc. Fourth Alvey Vision Conf. Manchester, 1988. P. 147-151.
13. Foerstner W. A Feature Based Correspondence Algorithm for Image Matching // ISPRS. Commission III Sympos. Rovaniemi. Finland, 1986.V. 26-3/3. P. 150-166.
14. Сергунов А.А. Перспективы применения детекторов характерных точек для обнаружения движущихся малоразмерных объектов на сложном фоне // Научная сессия ГУАП: сб. докладов: В3. Ч. II. Технические науки // СПб.: ГУАП, 2010. С. 60-62.
15. ГОСТ 20058. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556286C1 |
| Способ выставки БИНС ЛА корабельного базирования и устройство для его осуществления | 2016 |
|
RU2635398C2 |
| Способ одновременного измерения вектора скорости летательного аппарата и дальности до наземного объекта | 2016 |
|
RU2658115C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ УПРАВЛЯЕМОГО АППАРАТА, ПОДВЕШЕННОГО К САМОЛЕТУ-НОСИТЕЛЮ | 2014 |
|
RU2553776C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ НАВЕДЕНИЯ ДОВОДОЧНЫХ СТУПЕНЕЙ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2010 |
|
RU2440557C9 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |

Изобретение относится к способу динамической юстировки систем координат вертолета на основе их векторного согласования. Для динамической юстировки измеряют три ортогональные проекции векторов линейной и угловой скорости вертолета, которые измеряют в результате независимой обработки потоков изображений оптико-электронной системы (ОЭС). Результаты измерений сопоставляют с информацией бесплатформенной инерциальной навигационной системы (БИНС). При этом измерение ориентации указанных векторов производят не одновременно. Измерение ориентации вектора линейной скорости осуществляют при выполнении горизонтального прямолинейного полета на небольшой высоте и отсутствии угловой скорости, а измерение ориентации вектора угловой скорости осуществляют при вращении вокруг вертикальной оси и отсутствии линейного перемещения вертолета. Обеспечивается повышение точности оценки углового рассогласования результатов измерений ОЭС и БИНС, снижение массогабаритных характеристик. 3 ил., 3 табл.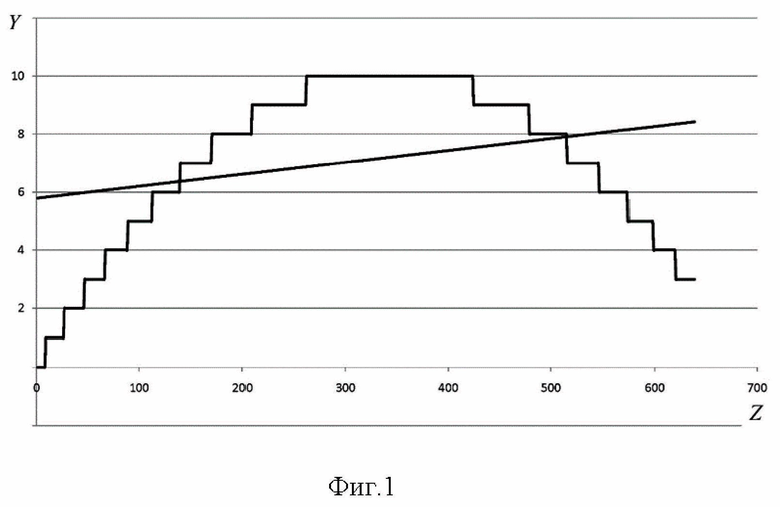
Способ динамической юстировки систем координат вертолета на основе их векторного согласования, заключающийся в измерении трех ортогональных проекций как минимум двух неколлинеарных векторов в приборной и связанной системах координат, определении их взаимной ориентации по разности одноименных проекций, отличающийся тем, что векторами, подлежащими согласованию, являются векторы линейной и угловой скорости вертолета, проекции которых на оси приборных систем координат постов оптико-электронной системы измеряют в результате независимой обработки потоков изображений, формируемых указанными системами, сопоставляют полученные результаты с информацией бесплатформенной инерциальной навигационной системы, при этом измерение ориентации указанных векторов производят не одновременно, измерение ориентации вектора линейной скорости осуществляют при выполнении горизонтального прямолинейного полета на небольшой высоте и отсутствии угловой скорости, а измерение ориентации вектора угловой скорости осуществляют при вращении вокруг вертикальной оси и отсутствии линейного перемещения вертолета.
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2556286C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| CN 109556631 A, 02.04.2019 | |||
| US 11274926 B2, 15.03.2022 | |||
| EP 2896936 A1, 22.07.2015. | |||

