Изобретение относится к транспортной технике, а именно, к устройствам подвеса транспортных средств к путевому полотну за счет сил притяжения между электромагнитом и ферромагнитной шиной полотна.
Известна левитационная система для высокоскоростного наземного транспорта, включающая расположенную на путевом полотне ферромагнитную шину, установленные на транспортном средстве электромагнит с обмоткой, датчик зазора и регулятор зазора.
Известна также принятая в качестве прототипа левитационная система, содержащая левитирующий объект (транспортное средство) и ферромагнитную опору (путевое полотно), с которой снизу посредством электромагнитных сил притяжения связан левитирующий объект, а также установленные на этом объекте для создания упомянутых электромагнитных сил постоянный магнит и электромагнит, датчик зазора и регулятор зазора, выход которого соединен с обмоткой электромагнита, а вход с датчиком зазора.
Недостатком прототипа является значительное энергопотребление системы вследствие неполной компенсации веса левитирующего объекта силой притяжения между магнитом, электромагнитом и ферромагнитной опорой.
Признаки прототипа, совпадающие с существенными признаками изобретения, заключаются в наличии левитирующего объекта и расположенной над ним ферромагнитной опоры, с которой указанный объект связан посредством электромагнитных сил притяжения, а также в наличии установленных на левитирующем объекте для создания электромагнитных сил притяжения постоянного магнита, электромагнита, датчика зазора и регулятора зазора, выход которого соединен с обмоткой электромагнита, а вход с датчиком зазора.
Причиной, препятствующей получению требуемого технического результата, является неполная компенсация изменяющейся массы левитирующего тела силой притяжения между магнитом, электромагнитом и ферромагнитной опорой.
Изобретение направлено на решение задачи уменьшения энергопотребления при изменяющейся массе левитирующего объекта.
Технический результат, который может быть получен при осуществлении изобретения, заключается в полной компенсации изменяющейся массы левитирующего объекта силой притяжения между установленным на левитирующем объекте постоянным магнитом и ферромагнитной опорой.
Для достижения технического результата в систему введен подвижный стакан, стакан и магнит установлены в верхней части объекта, магнит расположен внутри стакана, стакан расположен внутри электромагнита своей торцевой плоскостью ориентирован в направлении к ферромагнитной опоре, концентратор магнита расположен на оси стакана и ориентирован в направлении к ферромагнитной опоре, ферромагнитная опора снабжена дополнительным концентратором для взаимодействия с концентратором постоянного магнита, на торцевой плоскости стакана по его оси установлен датчик зазора.
Кроме того, система отличается наличием установленных на объекте датчика среднего тока электромагнита, регулятора положения стакана и привода, связанного механически со стаканом, причем указанный датчик входом включен в цель обмотки электромагнита, а выходом соединен с входом регулятора положения стакана, а выход регулятора соединен с приводом.
Наличие постоянного магнита позволяет компенсировать вес левитирующего объекта, а размещение датчика зазора на линии концентрации магнитных сил постоянного магнита и электромагнита, а также возможность вертикального перемещения датчика зазора путем соответствующего перемещения стакана позволяют обеспечить устойчивость указанной компенсации как в вертикальном, так и в горизонтальном направлениях при изменяющейся массе объекта.
На чертеже схематично показана заявляемая левитационная система.
Левитационная система содержит левитирующий объект (не показан) и расположенную над объектом ферромагнитную опору 1 с концентратором 2. На левитирующем объекте установлены электромагнит 3 с обмоткой (показана двойной штриховкой), стакан 4 с торцевой плоскостью 5, постоянный магнит 6 с концентратором 7 в его верхней части, датчик 8 зазора, регулятор 9 зазора и переменный резистор 10, включенный последовательно в цепь обмотки электромагнита 3 для регулирования жесткости подвеса. При этом стакан 4 (его верхняя часть) расположен внутри электромагнита 3 соосно с ним. Внутри стакана 4 установлен постоянный магнит 6 с концентратором 7 в верхней части, который расположен соосно со стаканом 4. На торцевой плоскости 5 стакана 4 соосно с ним расположен датчик 8 зазора, соединенный с входом регулятора 9, выход которого через переменный резистор 10 соединен с обмоткой электромагнита 3. Стакан 4 установлен на левитирующем объекте с возможностью перемещения вдоль своей оси относительно этого объекта и соответственно электромагнита 3 и постоянного магнита 6, которые неподвижны относительно левитирующего объекта. Перемещение это может осуществляться вручную или автоматически. Для автомати- ческого перемещения стакана 4 в системе предусмотрен датчик 11 среднего тока электромагнита 3, регулятор 12 положения стакана 4 и привод 13 этого стакана.
Работа левитационной системы заключается в следующем.
При фиксированной массе левитирующего объекта расстояние δ(δ=δ1+δ2) между концентраторами 2 и 7 такое, что вес левитирующего тела равен силе притяжения между постоянным магнитом 6 и ферромагнитной опорой 1. В этом положении левитирующего объекта нет необходимости в какой-либо силе со стороны электромагнита 3, вследствие чего ток через обмотку электромагнита равен нулю. Это соответствует определенному (заданному) зазору δ1 между концентратором 2 и датчиком 8 зазора. Величина δ1 задана задатчиком зазора (не показан), который подключен к одному из входов регулятора 9 или расположен внутри этого регулятора.
Однако равновесие между весом левитирующего объекта и силой притяжения магнита 6 к опоре 1 является неустойчивым и любое незначительное внешнее воздействие приведет к прогрессирующему увеличению или уменьшению δ1 При увеличении δ1 выше заданной величины датчик 8 зазора, воздействуя на регулятор 9 зазора, обуславливает в обмотке электромагнита 3 ток соответствующих величины и направления, что увеличивает подъемную силу и уменьшает зазор δ1 до его первоначальной (заданной) величины. При уменьшении δ1 относительно заданной величины датчик 8 зазора, воздействуя на регулятор 9 зазора в обратном направлении, обуславливает в обмотке электромагнита 3 ток соответствующей величины, но обратного направления, что увеличивает отталкивающую силу и тем самым увеличивает зазор δ1 до его первоначальной (заданной) величины. Так, путем вертикальных микроколебаний левитирующего объекта около заданной величины зазора δ1 обеспечивается поддержание величины этого зазора на заданном значении с определенной точностью. При этом средний ток через обмотку электромагнита 3 равен нулю. Это справедливо лишь при фиксированной массе левитирующего объекта. Если же масса левитирующего объекта меняется, что является обычным делом на транспорте, меняется и условие равновесия между весом левитирующего объекта и силой притяжения магнита 6 к опоре 1, точка этого равновесия смещается вверх или вниз. Например, при увеличении массы объекта эта точка равновесия сил смещается вверх. Однако система автоматического регулирования зазора δ1 (датчик 8, регулятор 9 и электромагнит 3) по-прежнему обеспечивает прежнее заданное значение этого зазора. При этих условиях вес левитирующего объекта не может быть полностью уравновешен силой притяжения магнита 6 к опоре 1, что обуславливает необходимость дополнительной постоянной силы взаимодействия между электромагнитом 3 и опорой 1 и соответственно определенного (ненулевого) среднего тока через обмотку электромагнита 3. Этот средний ток выделяется датчиком 11 и направляется на вход регулятора 12, который включает привод 13, механически связанный со стаканом 4. В результате этого стакан 4 перемещается вдоль своей оси в соответствующем направлении вместе с датчиком 8. Расстояние δ2 между датчиком 8 и концентратором 7 магнита 6 изменяется. В то же время система автоматического регулирования зазора δ1 обеспечивает неизменность этого зазора. Изменение δ2 при неизменности δ1 обуславливает изменение расстояния δ между концентраторами 2 и 7 до такого значения, при котором вновь достигается полное равенство между весом левитирующего объекта и силой притяжения магнита 6 к опоре 1, т.е. равенство нулю среднего тока электромагнита 3. При этом жесткость подвеса регулируется резистором 10.
Регулирование δ2 может осуществляться также вручную, т.е. без регулятора 12 и привода 13, путем вертикального перемещения стакана 4.
Регулирование δ2 (ручное или автоматическое) обеспечивает нулевое значение среднего тока через обмотку электромагнита 3 независимо от изменения массы левитирующего объекта, что снижает энергопотребление.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОУСТАНАВЛИВАЮЩИЙСЯ ТРЕХКОМПОНЕНТНЫЙ СЕЙСМОПРИЕМНИК | 1992 |
|
RU2046374C1 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС | 2023 |
|
RU2816409C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047189C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| СЕЙСМОПРИЕМНИК | 1992 |
|
RU2047188C1 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539304C2 |
Использование: транспорт на магнитном подвесе. Сущность изобретения: система содержит левитирующий объект, установленную над объектом ферромагнитную опору 1 с концентратом 2, стакан 4, постоянный магнит 6 с концентратором 7 и два контура автоматического регулирования зазора и положения стакана 4. Контур регулирования зазора включает датчик 8, регулятор 9 и электромагнит 3. Контур регулирования положения стакана 4 включает датчик 11 среднего тока электромагнита, регулятор 12 и привод 13. Привод 13 механически связан со стаканом 4. На торцевой плоскости стакана 4 установлен датчик 8 зазора. Первый контур обеспечивает постоянство зазора между концентратором 2 и датчиком 8. Второй контур обеспечивает нулевой уровень среднего тока электромагнита при изменяющейся массе левитирующего объекта. 1 з.п. ф-лы, 1 ил.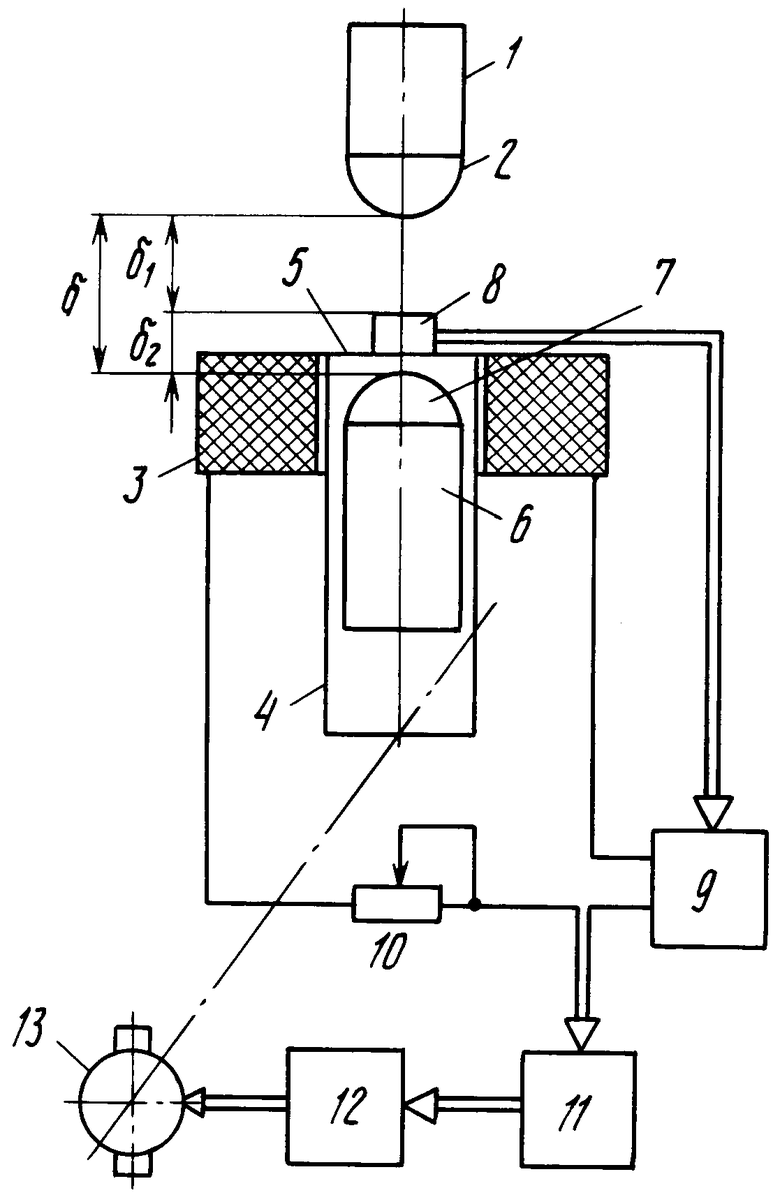
| Измеритель скорости распространения ударных волн | 1987 |
|
SU1430761A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
