Область техники, к которой относится изобретение
Изобретение относится к устройству для перемещения объектов, устройств и грузов под потолком с использованием эффекта магнитной левитации.
Уровень техники
Для перемещения грузов в помещениях используются различные кран-балки, например, такие как представленная в патенте CN214859926. Подъемное устройство, входящее в состав кран-балки, может перемещаться вдоль несущего рельса, установленного под потолком над теми местами, откуда и куда необходимо перемещать груз. Подъемное устройство может содержать электродвигатель, обеспечивающий перемещение вдоль несущего рельса за счет вращения ролика, прижимаемого к несущему рельсу, а также электродвигатель, обеспечивающий подъем и спуск груза, прикрепленного к тросу, за счет вращения барабана, на который наматывается или с которого сматывается трос.
Недостатки кран-балки заключаются в следующем.
1) Необходимость установки направляющего рельса;
2) Подъемное устройство может перемещаться только вдоль направляющего рельса;
3) Невозможность проведения грузоподъемных операций и перемещения грузов между локациями, расположенными вдали от направляющего рельса кран-балки.
Раскрытие изобретения
Задачей изобретения является обеспечение возможности перемещения объектов, устройств и грузов в помещениях под всей поверхностью потолка с помощью левитирующего подвеса, то есть без механического контакта подвеса с потолком.
Задача изобретения решается с помощью левитирующего подвеса для перемещения под ферромагнитным потолком, содержащего по меньшей мере один электромагнит для обеспечения левитации, по меньшей мере один датчик зазора и по меньшей мере один индуктор линейного электродвигателя. Электромагнит, датчик зазора и индуктор линейного электродвигателя должны быть соединены друг с другом (предпочтительно механически). При этом индуктор (активная обмотка, первичный элемент, статор) линейного двигателя закреплен на самом левитирующем подвесе, а роль вторичного элемента (якоря) линейного двигателя в базовом варианте выполняет ферромагнитный потолок.
В предпочтительном варианте подвес содержит по меньшей мере три электромагнита, соединенных друг с другом., и может содержать по меньшей мере два индуктора линейных электродвигателя, соединенных друг с другом. Электромагниты преимущественно образуют плоскость, т.е. лежат в вершинах треугольника. Индукторы линейных электродвигателей могут быть разнонаправленными.
В одном из вариантов подвес может содержать по меньшей мере три датчика зазора. В другом варианте подвес может дополнительно содержать по меньшей мере один датчик наклона. В предпочтительном варианте по меньшей мере один электромагнит, и по меньшей мере один индуктор линейного электродвигателя соединены друг с другом с помощью основания, выполненного с использованием немагнитного материала.
Потолок может быть или полностью выполнен из листов стали или быть выложен из нескольких стальных «дорожек», где возможно движение. Стальной потолок притягивает электромагниты, а также, в базовом варианте, выполняет роль вторичного элемента линейных двигателей. В преимущественном варианте потолок дополняется снизу тонкой немагнитной пластиной из хорошего проводника (например, алюминия), лучше выполняющего функцию вторичного элемента линейного двигателя.
В преимущественном варианте подвес также содержит источник питания и/или контроллер, выполненный с возможностью обработки показаний датчика зазора и регулирования тока, подаваемого на электромагнит. В предпочтительном варианте количество датчиков зазора соответствует количеству электромагнитов и датчики зазора могут размещаться рядом с электромагнитами, например, на расстоянии от них не более размера электромагнита, или на электромагнитах. Контроллер предпочтительно может также управлять и индукторами линейных электродвигателей. Электромагниты предпочтительно являются гибридными электромагнитами, т.е. в дополнение к электромагнитным катушкам содержат постоянные магниты.
Подвес может быть снабжен грузоподъемным устройством и/или видеокамерой и/или другой полезной нагрузкой. Подвес также может иметь датчики зазора, определяющие расстояние между подвесом и стенами, и/или видеокамеры бокового обзора. Кроме того, подвес может быть снабжен элементами приема/передачи данных, например, по таким каналам, как ИК, радио, индукционный и др.
Задача изобретения также решается с помощью системы перемещения, состоящей из ферромагнитного потолка и левитирующего подвеса по любому из вышеописанных вариантов. Эта система может быть предназначена для перемещения объекта и левитирующий подвес может быть выполнен с возможностью прикрепления к нему перемещаемого объекта. В частном варианте под ферромагнитным потолком может быть установлена проводящая немагнитная пластина.
Основной технический результат заключается в обеспечении возможности перемещения левитирующего подвеса (а значит и подвешенных к нему объектов, устройств и грузов) под поверхностью потолка без механического контакта подвеса с потолком. Технический результат достигается благодаря тому, что левитирующий подвес снабжен:
1) электромагнитом и датчиком зазора, обеспечивающими левитацию подвеса под потолком, и
2) индуктором линейного электродвигателя, обеспечивающим перемещение левитирующего подвеса вдоль потолка, при этом роль вторичного элемента линейного двигателя выполняет ферромагнитный потолок (в базовом варианта) или проводящая немагнитная пластина (в предпочтительном варианте).
Технический результат достигается только полной совокупностью признаков 1) и 2), также указанных в независимом пункте формулы изобретения. Для обеспечения возможности перемещения левитирующего подвеса под поверхностью потолка без механического контакта подвеса с потолком необходимо как обеспечить левитацию, так и само перемещение, что и обеспечивается всеми признаками, указанными в независимом пункте, совместно.
Это означает, что без какого-либо признака из указанных в независимом пункте формулы изобретения технический результат будет недостижим, поскольку либо не обеспечивается левитация (без электромагнитов, притягивающихся в ферромагнитному потолку, и датчиков зазора, измеряющих расстояние до него), либо отсутствует возможность перемещения (если отсутствует линейный электродвигатель).
Дополнительный технический результат заключается в обеспечении возможности перемещения левитирующего подвеса (а значит и подвешенных к нему объектов, устройств и грузов) под поверхностью потолка в любых направлениях без механического контакта подвеса с потолком. Этот дополнительный технический результат достигается благодаря тому, что левитирующий подвес (система перемещения) может быть снабжен двумя или более линейными электродвигателями, обеспечивающими перемещение во всех направлениях и, в некоторых случаях, поворот левитирующего подвеса за счет создания линейными двигателями вращательного момента.
Кроме того, другой дополнительный технический результат достигается благодаря тому, что левитирующий подвес снабжен тремя или более электромагнитами и несколькими датчиками зазора (или одним датчиком зазора вместе хотя бы с одним датчиком наклона), которые обеспечивают свободную левитацию и помогают удержать плоскость подвеса параллельно потолку и не ограничивают возможность его перемещения какими-либо направлениями за счет того, что подвес поддерживается в левитирующем состоянии в плоскости параллельно потолку, в то время как в уровне техники подвес может перемещаться только однонаправленно.
Дополнительные технические результаты достигаются только полной совокупностью признаков, указанных в независимом пункте 1 и зависимых пунктах 2-4 формулы изобретения. Три электромагнита, притягивающихся к ферромагнитному потолку и датчик зазора необходимы для обеспечения левитации подвеса, не ограниченной по возможным направлениям перемещения, а два разнонаправленных линейных электродвигателя необходимы для обеспечения перемещения левитирующего подвеса в любых направлениях. Следовательно, для обеспечения возможности перемещения левитирующего подвеса под поверхностью потолка в любых направлениях без механического контакта подвеса с потолком необходимо как обеспечить левитацию без ограничения по направлению перемещения, так и само перемещение в любых направлениях, что и обеспечивается всеми признаками, указанными в независимом пункте, совместно.
Это означает, что без какого-либо признака из указанного в независимом пункте 1 и зависимых пунктах 2-4 формулы изобретения дополнительный технический результат будет недостижим, поскольку либо не обеспечивается левитация (без электромагнитов, и датчика зазора), либо ограничивается возможность, устойчивость и скорость перемещения (если электромагнитов меньше трех), либо не обеспечивается перемещение в любом направлении (если отсутствуют линейные электродвигатели, или если линейных электродвигателей меньше двух).
Краткое описание чертежа
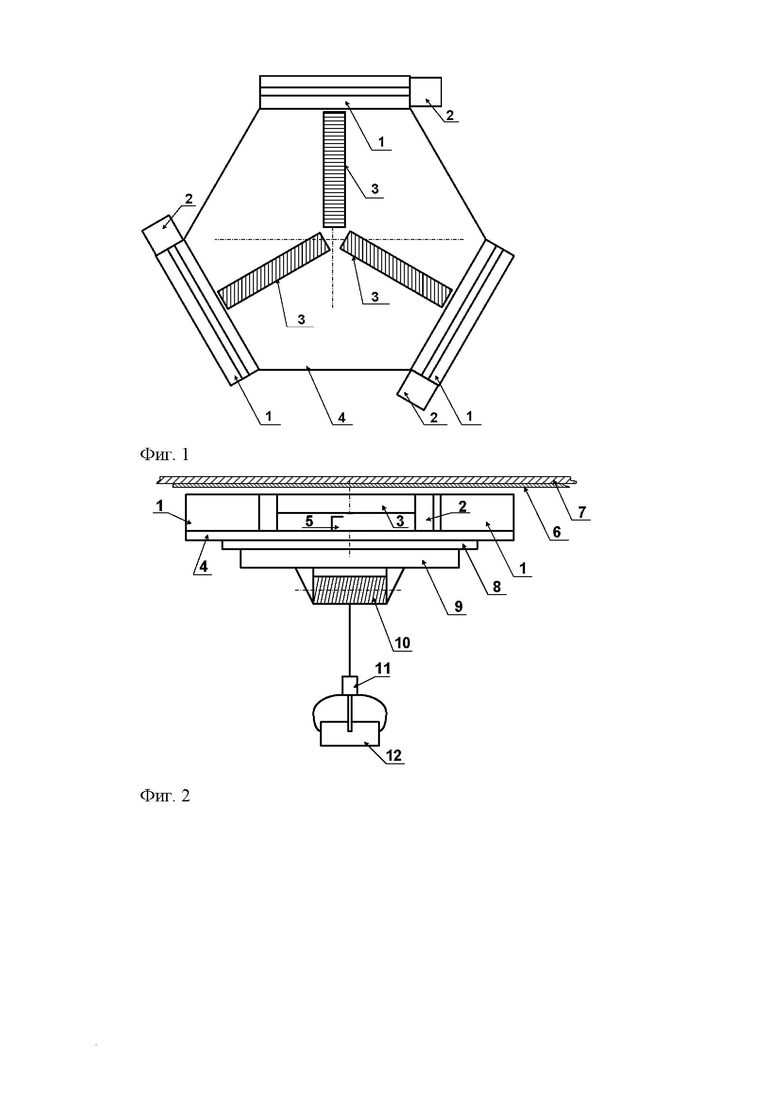
На фиг. 1 показан вид сверху левитирующего подвеса для движения под потолком с тремя линейными электродвигателями.
На фиг. 2 показан вид сбоку левитирующего подвеса для движения под потолком.
На фигурах обозначены:
1. Электромагниты
2. Датчики зазора
3. Обмотки индуктора линейных электродвигателей
4. Основание устройства
6. Проводящая немагнитная (алюминиевая) пластина
7. Стальной (ферромагнитный) потолок
8. Блок управления устройством (плата микроконтроллера)
9. Аккумуляторная батарея
10. Грузоподъёмный механизм
11. Грейферное устройство
12. Полезный груз
Осуществление изобретения
Далее изобретение описано по отношению к фигурам, на которых представлен возможный вариант осуществления изобретения. Описываемые варианты, в т.ч. показанный на фигурах, не являются ограничивающими объем охраны изобретения и предназначены лишь для пояснения ее сущности. Объем охраны изобретения определяется последующей формулой изобретения.
Для удобства восприятия левитирующее устройство изображено и описывается в рабочем положении, при котором электромагниты 1 и обмотки индуктора линейных двигателей 3, расположенные на основании 4 устройства, создают магнитное поле вверху в зазоре между основанием 4 и потолком 7. Постоянное магнитное поле электромагнитов обеспечивает притяжение к стальному потолку, противодействуя силе тяжести, а переменный (преимущественно – трехфазный) ток, генерируемый обмотками индуктора обеспечивает движение по схеме обычного асинхронного линейного двигателя. То есть, магнитные поля от электромагнитов и линейных электродвигателей направлены вверх, к ферромагнитному потолку. Этот вариант расположения, детально охарактеризованный в описании, не является ограничивающим, поскольку левитирующий подвес до эксплуатации (например, при хранении или транспортировке) может быть перевернут, располагаться вертикально или под наклоном или вдали от потолка, а перемещаться не магнитными силами, а другими силовыми воздействиями, например, человеком или механическим погрузчиком. Таким образом, настоящее изобретение в широком смысле относится к самым разным левитирующим подвесам, которые могут быть расположены любым образом и обладают всеми признаками, указанными в независимом пункте формулы изобретения.
На фигурах показано преимущественное структурное устройство левитирующего подвеса. Показанное устройство для (левитирующего) перемещения под ферромагнитным (стальным) потолком 7, как еще может быть назван левитирующий подвес, содержит основание 4, выполненное с использованием немагнитного материала, три электромагнита 1, датчики зазора 2 и три линейных электродвигателя 3. Для повышения производительности линейных двигателей потолок 7 дополняется снизу тонкой немагнитной пластиной 6 из хорошего проводника (например, алюминий), выполняющего функцию вторичного элемента двигателей.
Немагнитная проводящая пластина 6 может собираться из нескольких немагнитных проводящих элементов, таких как балки, брусья, ячейки, отдельные пластинки и т.п., и для увеличения эффективности должна располагаться под потолком.
Основание 4 левитирующего подвеса может быть выполнено с использованием любого немагнитного материала, обеспечивающего достаточную прочность конструкции.
В одном из вариантов основание может быть выполнено в виде плоского листа, т.е. пластины. Такой лист (например, металлический) может быть профилированным в поперечном сечении, причем профиль может иметь часть для прикрепления линейных двигателей и часть (или несколько частей) для крепления элементов подвеса (электромагнитов, датчиков и т.п.). Кроме того, лист может иметь различные отверстия, вырезы, углубления и т.п.
В другом варианте основание может быть выполнено в виде объемного элемента. Для размещения и взаимодействия с линейными двигателями могут быть предусмотрены посадочные места с соответствующими способами крепления линейных двигателей и других элементов подвеса, например, электромагнитов. Некоторые части объемного элемента могут иметь плоские участки. В частных вариантах основание может иметь поверхности или общую форму, которые близки к плоским или в общем масштабе представляются плоскими, однако выступы, углубления или неровности поверхности в более близком рассмотрении будут делать пластину объемным элементом. Кроме того, основание может состоять из плоских участков, расположенных под наклоном или различными углами друг по отношению к другу, то есть основание может быть, например, изогнута и, таким образом, также являться объемным элементом.
Основание 4 выполняет роль корпуса, к которому крепятся другие элементы устройства. К основанию 4 прикреплены электромагниты 1, на которые установлены датчики зазора 2. Электромагниты предназначены для притягивания подвеса снизу к ферромагнитному потолку 7. Потолок представляет собой элемент обстановки, расположенный над помещением или обслуживаемой территорией.
Потолок может быть или полностью в виде стальной (ферромагнитной) пластины или собираться из нескольких ферромагнитных элементов, таких как балки, брусья, ячейки, отдельные пластинки и т.п. В других вариантах потолок может быть снабжен ферромагнитной пластиной и/или перечисленными ферромагнитными элементами.
На фиг. 1 показано, что подвес имеет три электромагнита 1. Такое количество необходимо для обеспечения горизонтальной левитации подвеса (удержания плоскости параллельно потолку). Сам левитирующий подвес преимущественно является плоским, как минимум, в области, обращенной к потолку, где расположены электромагниты и линейные двигатели. Подвес может иметь выступы вверх и углубления в верхней своей части при рабочем расположении (то есть, под потолком), однако общая конфигурация подвеса имеет преимущественную плоскую составляющую.
Электромагниты 1 в подвесе, показанном на фигурах, прикреплены к основанию 4. В показанных на фигурах варианте выполнения подвеса электромагниты и другие элементы (датчики, линейные электродвигатели) соединены между собой посредством корпуса, в других вариантах они могут быть соединены между собой непосредственно или с помощью других элементов. В частности, датчики зазора 2 прикреплены к электромагнитам 1 непосредственно, хотя в других вариантах могут быть предусмотрены другие варианты расположения.
Электромагниты обеспечивают левитацию подвеса за счет магнитного поля, взаимодействующего с ферромагнитным потолком, и тем самым обеспечивающего силу притяжения электромагнитов, а значит и подвеса в целом к потолку.
Электромагниты обеспечивает компенсацию полного веса подвеса, в том числе с грузом или прикрепленными к нему устройствами, с обеспечением равновесного левитационного воздушного зазора между подвесом и потолком. Благодаря магнитному полю, генерируемому электромагнитами (электромагнитными катушками), входящими в состав подвеса, подвес притягиваются вверх к потолку. Величина магнитного поля, формируемого электромагнитами, зависящая от величины тока в электромагнитных катушках, регулируется так, чтобы подвес оказывался в подвешенном состоянии так, чтобы между ним (или электромагнитами, входящими в его состав) и потолком обеспечивался некоторый зазор, достаточный для левитации.
Расстояние (зазор) между подвесом и потолком измеряется с помощью датчиком зазора и далее, на основании этих измерений, осуществляется регулирование силы тока в электромагнитах. При увеличении расстояния сила тока увеличивается, электромагниты генерируют более сильные магнитные поля и подвес сильнее притягивается к потолку, в результате чего расстояние между подвесом и потолком сокращается до заданной величины. При уменьшении расстояния сила тока уменьшается, электромагниты ослабляют генерируемые магнитные поля и подвес слабее притягивается к потолку, в результате чего расстояние между подвесом и потолком увеличивается до заданной величины. Так обеспечивается магнитная левитация подвеса.
Подвес имеет несколько датчиков зазора 2, что необходимо для измерения отклонений от заданной величины зазора между подвесом (в частности, его электромагнитами) и потолком в нескольких точках потолка, расположенных в плоскости, преимущественно параллельной плоскости потолка. Датчики зазора могут иметь принципы действия, известные в уровне техники. Например, это могут быть оптические, емкостные, ультразвуковые датчики зазора и других типов.
На фиг. 1 показаны три датчика зазора 2, закрепленные на электромагнитах 1. Поскольку зазор измеряется преимущественно в вертикальном направлении, точки измерения зазора на потолке соответствуют местам расположения датчиков зазора в подвесе, и датчики зазора также должны быть расположены в плоскости или, точнее говоря, не на одной линии. Это связано с тем, что подвес имеет плоскую структуру, располагаемую параллельно плоскому потолку, и необходимо сохранять зазор между подвесом и потолком по всей плоскости.
Для обеспечения требуемого зазора между плоскостями подвеса и потолка достаточно трех датчиков зазора и трех электромагнитов, расположенных не на одной линии, т.е. в плоскости (в которой, в частности, лежит треугольник, в вершинах которого находятся датчики зазора, например, их средние или одинаковые точки или точки непосредственных датчиков физических полей, используемых для измерения зазоров), и трех электромагнитов, расположенных не на одной линии, т.е. в плоскости (в которой, в частности, лежит треугольник, в вершинах которого находятся электромагниты, например, их средние или одинаковые точки).
В тех случаях, когда датчиков зазора больше трех, как минимум трое из них должны находиться не на одной линии, т.е. они между собой должны образовывать треугольник или, другими словами, линии, на которых попарно лежат датчики зазора, должны пересекаться, то есть образовывать между собой угол больше 0° и меньше 180°. Аналогично, когда электромагнитов больше трех, как минимум трое из них должны находиться не на одной линии, т.е. они между собой должны образовывать треугольник или, другими словами, линии, на которых попарно лежат электромагниты, должны пересекаться, то есть образовывать между собой угол больше 0° и меньше 180°. Точки в датчиках зазора и электромагнитах, через которые мысленно проводятся линии или прокладываются плоскости, определяются по правилам, описанным в предыдущем абзаце или другим образом, обеспечивающим аналогичность расположения точек.
В предпочтительном варианте, как это показано на фиг. 1, количество датчиков зазора соответствует количеству электромагнитов, что упрощает сам подвес и алгоритмы управления ввиду соответствия количеств датчиков зазора и электромагнитов, а также, предположительно, мест их расположения. Однако датчиков зазора может быть и больше, чем электромагнитов, что позволяет более точно регулировать левитацию подвеса и, в некоторых случаях, упрощает алгоритмы управления ввиду большего объема данных, отражающих положение левитирующего подвеса относительно потолка, т.к. требуемые значения зазоров могут измеряться или определяться по более простым закономерностям в случае подходящего размещения датчиков в подвесе.
В одном из вариантов датчики зазора могут размещаться рядом с электромагнитами, например, на электромагнитах или около них на расстоянии не более размера электромагнита. Это обеспечит довольно близкое соответствие значений зазоров, измеренных датчиками зазоров, значениям зазоров между электромагнитами и потолком. Это упростит алгоритмы управления левитирующим зазором, повысит точность позиционирования левитирующего подвеса относительно потолка и надежность подвешивания и перемещения груза ввиду снижения рисков падения подвеса или его прилипания к потолку благодаря повышенной точности позиционирования подвеса.
В других вариантах датчики зазора могут располагаться между электромагнитами (в плоскости подвеса), а зазор для каждого электромагнита вычисляться с использованием значений зазоров, измеренных двумя или более датчиками зазора, расположенными с разных сторон электромагнита.
В случае применения электромагнитов в виде простых электромагнитных катушек, для обеспечения постоянной левитации подвеса в них будет протекать постоянный ток, обеспечивающий постоянное магнитное поле. Постоянный ток будет иметь достаточно большую величину, что будет приводить к повышенному расходу электроэнергии, а значит потребуется аккумулятор большой емкости. В преимущественном варианте для снижения расхода электроэнергии и упрощения требований к источнику питания электромагниты могут представлять собой гибридные электромагниты, т.е. в дополнение к электромагнитным катушкам они могут содержать постоянные магниты.
Величина магнитного поля, формируемого гибридными электромагнитами, зависит от величины коэрцитивной силы постоянных магнитов и величины тока электромагнитных катушек. Заданный зазор между подвесом и потолком по-прежнему обеспечивается изменением тока в электромагнитных катушках, однако характер подвешивания изменяется. В гибридных электромагнитах основная и постоянная сила притяжения обеспечивается с помощью постоянных магнитов, т.е. без энергозатрат.
Система управления гибридными электромагнитами формирует управляющие электрические токи в электромагнитных катушках таким образом, чтобы они во взаимодействии с ферромагнитным потолком, формировали результирующие электромагнитные силы, обеспечивающие гарантированные безопасные зазоры с учётом величины равновесного левитационного воздушного зазора, требуемого для работы описываемого изобретения. Таким образом, электромагнитные катушки в любой момент времени создают достаточную по величине и направлению дополнительную магнитную силу для компенсации недостаточных или избыточных сил притяжения постоянных магнитов к потолку, которые зависят от расстояний между постоянными магнитами и потолком. В результате получается, что подвес незначительно отклоняется от равновесного положения, в котором сила притяжения постоянных магнитов точно соответствует весу подвеса (с т.ч. с грузом), и тут же возвращается обратно в это положение с помощью электромагнитов.
Пондеромоторная сила, уравновешивающая вес подвеса, генерируется постоянными магнитами с высокой коэрцитивной силой, встроенными в гибридные электромагниты. Незначительное количество электрической энергии необходимо для питания гибридного электромагнита и стабилизации положения подвеса относительно потолка. Стабилизация при изменении веса осуществляется подбором такого зазора между потолком и гибридными магнитами, при котором сила тяжести компенсируется притяжением постоянных магнитов к потолку. Наличие гибридных электромагнитов особенно важно во время перемещения груза вдоль потолка ввиду возможного непредсказуемого изменения центра масс подвеса и отклонений от центра приложения магнитных сил электромагнитного подвеса. Компенсацию таких флуктуаций обеспечивают электромагнитные катушки гибридных электромагнитов. Для существенного сокращения потребляемой электрической энергии, необходимой для реализации указанного контроля положения транспортного средства, сердечники гибридных электромагнитов могут быть выполнены из магнитомягких материалов с высокой намагничивающей способностью.
Гибридные электромагниты включают в себя электромагниты и постоянные магниты, формирующие над подвесом магнитное поле, направленное в вертикальном направлении. Кроме того, гибридные электромагниты могут содержать сердечники или магнитопроводы для концентрации магнитного поля, предпочтительно вверх. Материал сердечников электромагнитных катушек должен обеспечивать малые потери при перемагничивании и не иметь высокой остаточной намагниченности.
Для перемещения левитирующего подвеса в рабочем положении, то есть в положении левитации относительно потолка, в подвесе предусмотрены обмотки индуктора линейных электродвигателей, которые, совместно с неподвижным вторичным элементом (самим потолком в базовом и проводящей пластиной на нем в преимущественном вариантах), также могут называться линейными двигателями или электродвигателями.
Линейный двигатель – это электродвигатель, у которого один из элементов магнитной системы (индуктор) разомкнут и имеет развёрнутую обмотку, создающую переменное магнитное поле, а другой (вторичный элемент) взаимодействует с ним и выполнен в виде ферромагнитного потолка или (в преимущественном варианте) в виде проводящей немагнитной пластины, обеспечивая линейное перемещение подвижной части двигателя, т.е. обмотки индуктора, прикрепленной в частном варианте к основанию, относительно потолка.
В настоящем изобретении под линейным электродвигателем понимается индуктор линейного электродвигателя, который прикреплен к подвесу и взаимодействует с ферромагнитным потолком электромагнитным образом. В том случае, когда вместо термина «индуктор линейного электродвигателя» упомянут «линейный электродвигатель», необходимо понимать, что подразумевается его индуктор. Под осью индуктора далее понимается линия, вдоль которой направлен вектор тяги линейного двигателя.
Обмотка индуктора линейного электродвигателя состоит из нескольких катушек, расположенных параллельно потолку 7. Катушки располагаются последовательно друг за другом вдоль линии, лежащей в плоскости, параллельной плоскости основания подвеса (или плоскости потолка в левитирующем состоянии) или близкой к ней. Расположение катушек вдоль линии означает, что вдоль линии расположены центры катушек и/или другие одинаковые их участки. Линия, вдоль которой расположены катушки, одновременно является и линией, вдоль которой будет перемещаться линейный электродвигатель вместе с левитирующим подвесом.
На катушки линейного электродвигателя подаются такие токи, которые формируют магнитное поле, имеющее переменную (например, периодичную) вдоль линии расположения катушек структуру и перемещающееся вдоль этой линии относительно катушек и подвеса. Указанное магнитное поле вследствие своего перемещения и, следовательно, изменения его величины в конкретных точках вызывает вихревые токи в немагнитном проводящем элементе потолка и, далее, во взаимодействии магнитного поля с наведенными вихревыми токами создается пондеромоторная сила, толкающая подвес в направлении, лежащем на линии, в которой расположены катушки линейного электродвигателя.
Благодаря одному линейному электродвигателю левитирующий подвес может перемещаться по одной линии в прямом или обратном направлении в зависимости от последовательностей токов, подаваемых в катушки электромагнитного двигателя. Для того, чтобы электродвигатель имел возможность перемещаться не только линейно, но мог достигнуть любой точки плоского потолка, в нем должно быть как минимум два линейных электродвигателя. В частном варианте, показанном на фигурах, левитирующий подвес содержит три линейных электродвигателя 3.
Для того, чтобы левитирующий подвес мог перемещаться в разных направлениях, оси индукторов линейных двигателей могут быть расположены преимущественно параллельно (однонаправленно, коллинеарно) и не на одной линии, в частности, со смещением от центра тяжести подвеса одного или обоих индукторов. Тогда, чисто поступательное движение подвеса (без вращения) может быть обеспечено только при определенном сочетании токов в обмотках, а чисто вращательное при другом сочетании, что можно использовать для установки нового направления поступательного движения. При всех других сочетаниях токов движение подвеса будет более сложно контролируемым.
По разные стороны относительно центра тяжести могут быть смещены два параллельных индуктора. Тогда одинаковые токи в них обеспечат линейное движение, поскольку толкающие силы от индукторов будут однонаправленными, а обратные токи (по полярности или фазе) в них обеспечат вращательное движение, поскольку толкающие силы от индукторов будут противоположно (обратно) направленными.
В другом варианте ось одного из индукторов может проходить через центр тяжести подвеса для обеспечения линейного перемещения без другого индуктора. При включении дополнительного индуктора, расположенного параллельно основному, не на одной линии с ним и со смещением от центра тяжести, подвес будет поворачиваться. Особенно эффективно он будет поворачиваться, когда через дополнительный индуктор протекает ток, обеспечивающий толкание подвеса в направлении, обратном тому, в котором толкает основной подвес, поскольку такое противоположно направленные силу будут разворачивать подвес практически на месте.
В другом варианте, для обеспечения перемещения левитирующего подвеса в разных направлениях, оси индукторов линейных двигателей могут проходить через центр тяжести подвеса и располагаться под углом друг к другу, то есть должны быть разнонаправленными. Тогда всегда отсутствует вращение подвеса, а вектор тяги, приложенный к подвесу есть векторная сумма вкладов каждого двигателя. Для двух двигателей оптимален угол 90° между осями, для трех - 120°, но работоспособность устройства сохраняется и при отклонении ±80° для двух и ±30° для трех двигателей.
Возможен также комбинированный вариант, когда оси части индукторов смещены от центра тяжести и расположены под углом друг к другу. Однако управление движением в такой системе будет более сложным.
В преимущественном варианте подвес также содержит источник питания, который может представлять из себя батарею химических элементов питания или перезаряжаемый аккумулятор. Это обеспечит автономность левитирующего подвеса. В частности, на фиг. 2 позицией 9 обозначена аккумуляторная батарея.
В других вариантах электрическое питание может подводиться к левитирующему подвесу через токосъемники или подводящие провода или кабели, которые преимущественно являются изгибаемыми, что позволит снизить вес левитирующего подвеса ввиду отсутствия необходимости размещения на его борту батареи или аккумулятора, а также увеличить время его работы, поскольку в случае снабжения электропитанием от внешнего источника левитирующий подвес может работать непрерывно и все время без затрат времени на смену батареи или подзарядку аккумулятора.
Левитирующий подвес предпочтительно содержит контроллер, обрабатывающий показания датчиков зазора и регулирующий ток (токи), подаваемый на электромагниты. В частности, на фиг. 2 позицией 8 обозначен блок управления устройством, который может представлять собой плату микроконтроллера, на которой и размещается контроллер. Благодаря наличию такого контроллера обеспечивается автономность левитирующего подвеса.
В другом варианте данные от датчиков зазора могут передаваться на внешний контроллер или компьютер, где производится их обработка и определяются токи, которые необходимо подавать в электромагниты. Далее в левитирующий подвес могут подавать сами токи для подачи в электромагниты (например, по проводам) или вычисленные величины токов (или другие их параметры), которые затем могут формироваться в электромагнитах непосредственно в левитирующем подвесе. Использование внешнего контроллера или компьютера может снизить вес левитирующего подвеса и увеличить длительность его работы.
Контроллер, входящий в состав подвеса, предпочтительно может также управлять и линейными электродвигателями. Для этого он может определять величины токов и другие их параметры в обмотках индуктора линейных двигателей или их изменений в каждый момент времени с последующей передачей в цепи, формирующие токи для линейных электродвигателей, таким образом, чтобы обеспечить перемещение левитирующего подвеса в заданном направлении. В других вариантах реализации подвеса величины токов для катушек линейных электродвигателей могут определяться во внешнем контроллере или компьютере, а в подвес могут подавать рассчитанные значения или непосредственно токи для катушек линейных двигателей (например, по проводам), что снизит вес левитирующего подвеса и увеличит длительность его работы.
Подвес может быть снабжен грузоподъемным устройством 10, благодаря которому левитирующий подвес может поднимать и перемещать вдоль потолка полезный груз 12. Для захвата груза 12 может применяться грейферное устройство 11 или электромагнит (в том случае, когда груз имеет магнитящиеся элементы).
В другом варианте подвес может быть снабжен видеокамерой. В частности, видеокамера может быть установлена вместо грузоподъёмного механизма и иметь устройство поворота/наклона. Такое расположение видеокамеры на левитирующем подвесе позволит приближать ее к интересующей области съемки и обеспечивать съемку кадров, имеющих наиболее информативное или эстетичное расположение снимаемых объектов.
Для предотвращения столкновений со стенами, другими подвесами или объектами, закрепленными на потолке/стенах (например, лампами, люстрами, светильниками), подвес также может иметь датчики зазора, определяющие расстояние между подвесом и стенами, и/или видеокамеры бокового обзора.
Кроме того, подвес может быть снабжен элементами приема/передачи данных, например, по таким каналам, как ИК, радио, индукционный и др. для обеспечения внешней обработки данных и/или внешнего управления. В частности, через такие элементы приема/передачи данных могут быть обеспечены каналы управления перемещением подвеса вдоль потолка (например, с управляющего пульта) и/или управления грузовым устройством и/или видеокамерами.
В базовом варианте левитирующий подвес для перемещения под ферромагнитным потолком может содержать один электромагнит, один датчик зазора и один линейный электродвигатель, соединенные друг с другом (преимущественно механически, в т.ч. жестко, например путем прикрепления друг к другу; соединение также может быть и электрическим). Электромагнит и линейный электродвигатель могут быть соединены друг с другом непосредственно или с помощью основания, выполненного с использованием немагнитного материала. Датчик зазора может быть прикреплен к электромагниту непосредственно или к основанию, к которому прикреплен электромагнит.
Если электромагнитов несколько, то они также могут быть соединены между собой (механически и/или электрически) непосредственно или с помощью основания. Если индукторов линейных электродвигателей несколько, то они также могут быть соединены между собой (механически и/или электрически) непосредственно или с помощью основания. Если датчиков несколько, то они также могут быть соединены между собой (механически и/или электрически) непосредственно или с помощью основания.
Возможности перемещения левитирующего подвеса (а значит и подвешенных к нему объектов, устройств и грузов) под поверхностью потолка без механического контакта подвеса с потолком обеспечивается благодаря тому, что левитирующий подвес снабжен:
1) электромагнитом и датчиком зазора, обеспечивающими левитацию подвеса под потолком, и
2) линейным электродвигателем, обеспечивающими перемещение левитирующего подвеса вдоль потолка.
Возможности перемещения левитирующего подвеса под поверхностью потолка без механического контакта подвеса с потолком обеспечивается только совместно электромагнитом, датчиком зазора и линейным электродвигателем. Для обеспечения возможности перемещения левитирующего подвеса под поверхностью потолка без механического контакта подвеса с потолком необходимо как обеспечить левитацию, так и само перемещение, что и обеспечивается этими признаками совместно.
В частности, электромагнит притягивается к ферромагнитному потолку, а датчик зазора измеряет зазор до потолка и ток, подаваемый на электромагнит, регулируется так, чтобы зазор между подвесом и потолком оставался в заданных пределах благодаря изменяющейся величине магнитного поля, формируемого электромагнитом. Одновременно с этим на индуктор линейного двигателя подают переменное напряжение, вследствие чего линейный двигатель формирует меняющееся электромагнитное поле, взаимодействующее с ферромагнитным потолком и вызывающее перемещение подвеса относительно потолка.
Как видно, для того, чтобы подвес левитировал и перемещался под ферромагнитным потолком, достаточно одного электромагнита и одного линейного электродвигателя. Большее количество электромагнитов (не менее трех) необходимо для удержания подвеса в левитирующем состоянии параллельно ферромагнитному потолку. В свою очередь, большее количество линейных необходимо для обеспечения возможности перемещения левитирующего подвеса под ферромагнитным потолком в любом направлении – для этого потребуется как минимум два разнонаправленных линейных электродвигателя.
Для обеспечения горизонтального положения подвеса токи, подаваемые на несколько электромагнитов, расположенных не на одной линии и образующих, тем самым треугольник, задающий плоскость подвеса, могут дополнительно к датчику зазора регулироваться с использованием показаний датчика наклона, которым может быть дополнительно снабжен подвес. В предпочтительном варианте подвес может содержать два или более разнонаправленных датчика наклона, чтобы можно было определять отклонение от плоскости, параллельной потолку (т.е. горизонтальной плоскости) в нескольких направлениях и затем увеличивать или уменьшать силу тока в соответствующих электромагнитах так, чтобы вернуть подвес в заданную плоскость.
В другом варианте, описанном выше, подвес может содержать несколько датчиков зазора, расположенных предпочтительно около электромагнитов или на них и замеряющих зазор между подвесом и потолком рядом с электромагнитами. Это позволит упростить алгоритм регулирования токов электромагнитов, обеспечивающий нахождение подвеса на заданном расстоянии от потолка в плоскости, параллельной потолку. Количество датчиков зазора в таком варианте предпочтительно соответствует числу электромагнитов, что дополнительно упрощает алгоритм регулирования.
Вышеописанные варианты осуществления изобретения могут быть реализованы как по отдельности, так и в комбинации. Представленные примеры реализации даны лишь для упрощения понимания изобретения и не предназначены для ограничения объема охраны изобретения, определяемого формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕВИТИРУЮЩИЙ ПОДВЕС С ЛИНЕЙНЫМ ДВИГАТЕЛЕМ И ПОВОРОТНЫМ УСТРОЙСТВОМ | 2023 |
|
RU2816413C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| ПОЧТОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НА МАГНИТНОМ ПОДВЕСЕ, УСТРОЙСТВО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ, УСТРОЙСТВО ЕЁ ПУНКТА ПОГРУЗКИ И РАЗГРУЗКИ, УСТРОЙСТВО ВЕРТИКАЛЬНОГО СТРЕЛОЧНОГО ПЕРЕХОДА ЭТОЙ СИСТЕМЫ | 2018 |
|
RU2706615C2 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| Устройство магнитной левитации на постоянных магнитах | 2020 |
|
RU2743104C1 |
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
Изобретение относится к подъемным устройствам. Левитирующий подвес для перемещения под ферромагнитным потолком содержит по меньшей мере один электромагнит, по меньшей мере один датчик зазора и по меньшей мере один линейный электродвигатель. Подвес может быть снабжен грузоподъемным устройством и/или видеокамерой. Обеспечивается возможность перемещения левитирующего подвеса, а значит и подвешенных к нему объектов, устройств и грузов, под поверхностью ферромагнитного потолка без механического контакта подвеса с потолком. 2 н. и 16 з.п. ф-лы, 2 ил.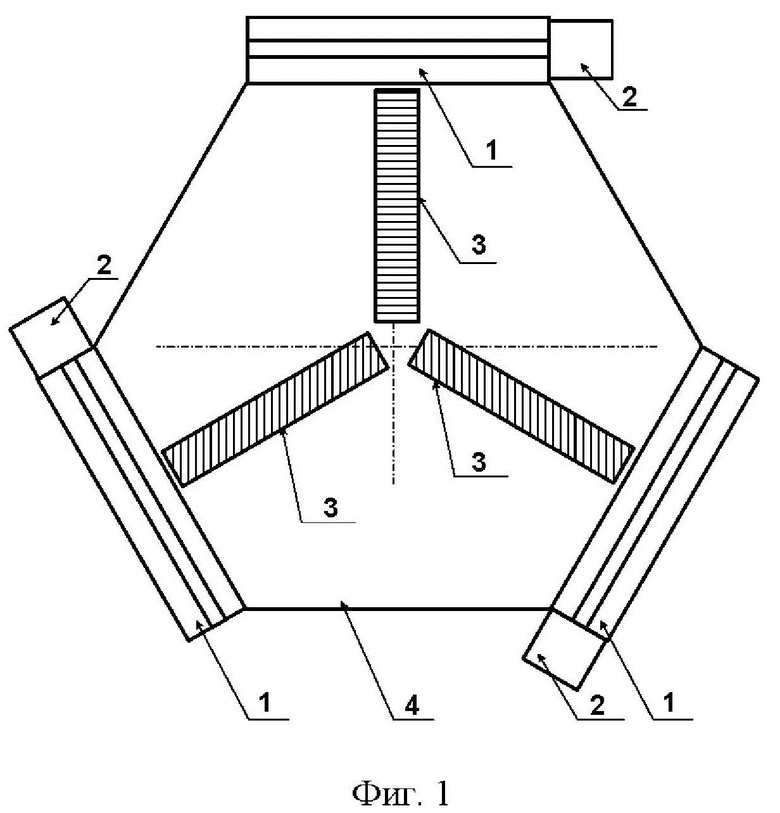
1. Левитирующий подвес для перемещения под ферромагнитным потолком, включающий в себя по меньшей мере один электромагнит, по меньшей мере один датчик зазора и по меньшей мере два индуктора линейных электродвигателей, соединенных друг с другом, причем индукторы линейных электродвигателей являются разнонаправленными.
2. Подвес по п. 1, отличающийся тем, что включает в себя по меньшей мере три электромагнита, соединенных друг с другом.
3. Подвес по п. 2, отличающийся тем, что электромагниты образуют плоскость.
4. Подвес по п. 1, отличающийся тем, что включает в себя по меньшей мере три датчика зазора.
5. Подвес по п. 1, отличающийся тем, что включает в себя по меньшей мере один датчик наклона.
6. Подвес по п. 1, отличающийся тем, что по меньшей мере один электромагнит, и по меньшей мере один индуктор линейного электродвигателя соединены друг с другом с помощью основания, выполненного с использованием немагнитного материала.
7. Подвес по п. 1, отличающийся тем, что включает в себя источник питания.
8. Подвес по п. 1, отличающийся тем, что включает в себя контроллер, выполненный с возможностью обработки показаний датчика зазора и регулирования тока, подаваемого на электромагнит.
9. Подвес по п. 8, отличающийся тем, что контроллер выполнен с возможностью управления индуктором линейным электродвигателем.
10. Подвес по п. 1, отличающийся тем, что количество датчиков зазора соответствует количеству электромагнитов.
11. Подвес по п. 1, отличающийся тем, что датчики зазора размещены рядом с электромагнитами или на электромагнитах.
12. Подвес по п. 1, отличающийся тем, что электромагниты являются гибридными электромагнитами.
13. Подвес по п. 1, отличающийся тем, что снабжен грузоподъемным устройством и/или видеокамерой.
14. Подвес по п. 1, отличающийся тем, что включает в себя датчики зазора, определяющие расстояние между подвесом и стенами, и/или видеокамеры бокового обзора.
15. Подвес по п. 1, отличающийся тем, что включает в себя элементы приема/передачи данных.
16. Система перемещения, включающая в себя ферромагнитный потолок и левитирующий подвес по любому из п. 1-15.
17. Система по п. 16, отличающаяся тем, что предназначена для перемещения объекта и левитирующий подвес выполнен с возможностью прикрепления к нему перемещаемого объекта.
18. Система по п. 17, отличающаяся тем, что под ферромагнитным потолком установлена проводящая немагнитная пластина.
| KR 0101335643 B1, 03.12.2013 | |||
| US 5197391 A, 30.03.1993 | |||
| US 4792036 A1, 20.12.1988 | |||
| Захватное устройство | 1986 |
|
SU1318505A1 |

