Изобретение относится к биомеханическим приводам деталей машин и механизмов, предназначено для преобразования энергоемкости рабочего тела в кинетическую энергию движения масс и может быть использовано в дорожно-транспортных средствах как широкого, так и специального, например инвалидного, спортивного и прочего назначения.
Известен мускульный привод транспортного средства, содержащий охваченные цепью ведущую и натяжную звездочковые пары, установленные на расположенных перпендикулярно осях вращения звездочек, причем моноходные ветви цепи снабжены жесткими связями.
Недостатком этого привода являются повышенные динамические нагрузки, связанные со звездочковой эксцентриситетностью точки приведения действующих сил и масс.
Наиболее близким по технической сущности к заявляемому является мускульный привод транспортного средства, содержащий охваченные цепью ведущую звездочку с педалями и ведомую звездочку, связанную с колесом транспортного средства, а также шарнирно установленную на раме транспортного средства и закрепленную с одной из ветвей цепи дополнительную звездочку, подпружиненную относительно рамы транспортного средства, причем упругий элемент закреплен на дополнительной звездочке шарнирно и эксцентрично оси ее вращения, при этом число зубьев ведущей звездочки вдвое больше числа зубьев дополнительной, эксцентриситетной звездочки.
Недостаток привода непроизводительные энергозатраты, обусловленные работой сил трения кинетически жестких относительно рамы соединений звездочек и звеньев цепи, вызванных эксцентриситетностью цепной трансмиссии.
Техническая задача изобретения повышение энергоемкости за счет уменьшения непроизводительных затрат и динамических нагрузок.
Поставленная цель достигается в мускульном приводе транспортного средства, содержащем охваченные цепью ведущую звездочку с педалями и ведомую звездочку, связанную с колесом транспортного средства, звездочку, подпружиненную относительно рамы и эксцентрично установленную относительно своей оси, за счет того, что концы оси звездочки кинематически соединены с рамой транспортного средства с возможностью фиксации и закреплены на раме посредством эластика.
Сущность изобретения оптимизированная на максимум энергоемкости авторегуляризации напряженно-деформируемого состояния действующего многогранника активных, реактивных и взаимодействующих сил и масс.
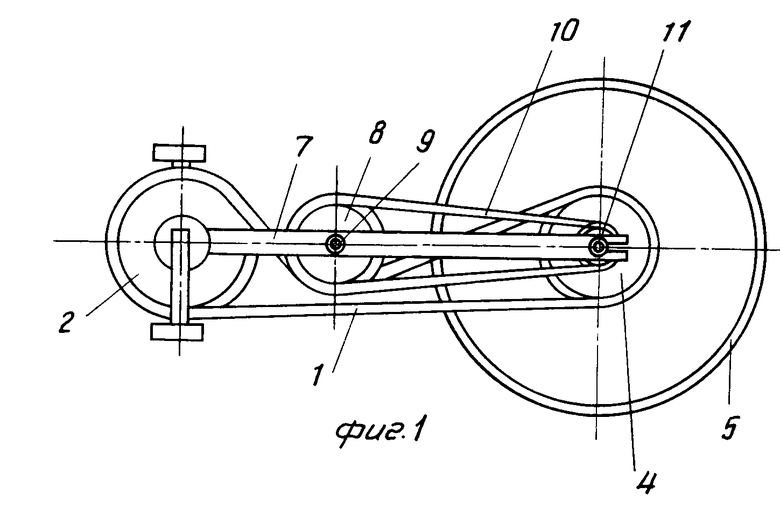
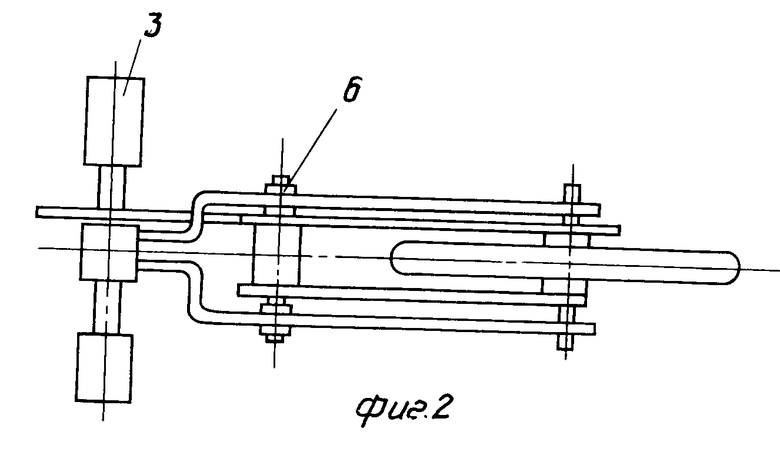
На фиг.1 представлен предлагаемый привод, реализованный на велосипедной базе; на фиг.2 правый моноблок эластика в разрезе.
Привод содержит цепь 1, ведущую звездочку 2 с педалями 3, ведомую звездочку 4 с колесом 5, эластик 6, раму 7, звездочку 8 с осью 9, цепь 10, звездочку 11.
Работает привод следующим образом.
Например, противочасовым вращением педалей 3 через звездочку 2 приводят в движение цепь 1, в результате чего путем вращения звездочки 4 и включения ее обгонной муфты (не обозначена) приводят во вращательное движение относительно рамы 7 колесо 5. При этом звездочку 8, установленную на оси 9 через свою обгонную муфту (не обозначена), вращают в том же направлении в режиме холостого хода. Вращение звездочки 8 противофазно модулирует натяжение цепи 1, вызываемое эксцентриситетностью установки и вращения звездочек 2 и 4.
При работе привода в режиме, например, холостого хода колеса 5 за счет работы эластика 6 в режиме упругих деформаций повышают равномерность передачи крутящего момента путем уменьшения амплитудных значений динамических нагрузок.
Поскольку основным физическим фактором в работе цепной передачи является удар, причем сила удара, в первом приближении, пропорциональна мгновенным значениям крутящего момента привода и скорости движения центров приведения действующих сил и масс, в нашем случае кинематической пары ролик цепи 1 зуб звездочки 2, то эластик 6 предназначен для ослабления воздействия удара путем уменьшения ударных нагрузок, возникающих при взаимодействии цепи 1 со звездочкой 8 при реверсивном педалировании.
В момент удара конец оси идет вверх-назад, при этом степень перекоса оси звездочки 8 будет многомерной функцией тензора деформации эластика 6, включая и нелинейную часть его напряженно-деформационной характеристики, причем части эластика будут испытывать широкий спектр деформаций.
В режиме работы привода при значительных нагрузках эластик 6 теряет упругость и переходит в состояние, близкое к твердому телу. Возникающая при этом нелинейность напряженно-деформационной характеристики повышает жесткость трансмиссии до пределов, определяемых мощностью рабочего тела и прочностью материалов и конструкций.
После разгона колеса 5 до биофакториально ограничиваемого предела осуществляют реверсирование направления вращения педалей 3. В результате этого звездочку 8 за счет включения ее обгонной муфты переводят в режим вращения другого ряда зубьев, который путем движения цепи 10 включает собственную обгонную муфту (не обозначена) звездочки 11, а звездочку 4 переводят в режим холостого хода. Таким образом, в реальном времени действия рабочего такта мускульного привода транспортного средства осуществляют передачу крутящего момента педального привода ведущему колесу транспортного средства в режиме прямого и реверсивного веломониторинга оптимизированным энергоемкостно путем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕЛОТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2032581C1 |
| ВЕЛОСИПЕД | 1991 |
|
RU2025385C1 |
| ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2048364C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1994 |
|
RU2084367C1 |
| ВЕЛОСИПЕД | 1993 |
|
RU2053154C1 |
| Велосипед | 1985 |
|
SU1350079A1 |
| Транспортное средство, приводимое в действие мускульной силой человека, преимущественно велосипед | 2017 |
|
RU2651477C1 |
| ПРИВОД ДЛЯ ВЕЛОСИПЕДОВ И ВЕЛОМОБИЛЕЙ | 2005 |
|
RU2294859C1 |
| ПРИВОД ВЕЛОСИПЕДА | 2000 |
|
RU2184673C2 |
| ВЕЛОСИПЕД | 1992 |
|
RU2025388C1 |
Использование: в экологически чистом транспорте. Сущность изобретения: эргодинамическая оптимизация путем авторегуляризации напряженного состояния действующего многогранника сил и масс. 2 ил.
МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА, содержащий охваченные цепью ведущую звездочку с педалями и ведомую звездочку, связанную с колесом транспортного средства, звездочку, подпружиненную относительно рамы и эксцентрично установленную относительно своей оси, отличающийся тем, что концы оси звездочки кинематически соединены с рамой транспортного средства с возможностью фиксации и закреплены на упомянутой раме посредством эластика.
| Мускульный привод транспортного средства | 1988 |
|
SU1562218A1 |
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
