Изобретение относится к способам преобразования энергии, в частности комплексного совместного преобразования гидростатической и тепловой энергии в механическую энергию вращения, и к устройствам по осуществлению этого способа. Изобретение может быть использовано в качестве стационарного источника механической энергии, в частности для получения электроэнергии.
Известен способ механического перемещения тел внутри жидкости с использованием гидростатических сил, заключающийся в том, что используют выталкивающую силу жидкости для перемещения тел вверх в вертикальном направлении [1]
Недостатком этого способа преобразования гидростатической энергии в механическую энергию является его одноактный характер и невозможность непосредственного использования получаемой механической энергии для непрерывного вращения других тел.
Указанный способ используется, в частности, в разного рода поплавках, выполненных в виде легких плавающих в жидкости предметов [2]
Такие поплавки, несмотря на воздействие на них выталкивающей силы, не способны обеспечить непрерывное вращение связанных с ними тел.
Известен также способ преобразования гидростатической энергии в механическую энергию вращения, заключающийся в использовании выталкивающей силы Архимеда, перемещающей под водой по замкнутой траектории пустотелые рабочие элементы-поплавки, связанные со средством вывода их из равновесного состояния [3]
Недостатком этого способа является то, что при его осуществлении не используется тепловая энергия, проявляющаяся при теплообмене между имеющими разную температуру нагрева слоями жидкости на разных ее уровнях.
Известно также устройство для преобразования гидростатической энергии в механическую энергию вращения, содержащее основание, на котором установлен ротор, на ободе которого размещены рабочие элементы-поплавки, связанные со средством вывода их из равновесного состояния [3]
Данное устройство имеет тот же недостаток, что приведенный выше способ преобразования энергии, что приводит к ненадежности его работы и малой нагрузочной способности.
Цель изобретения использование тепловой энергии за счет теплообмена между слоями жидкости, имеющими разную температуру нагрева, и повышение при этом надежности в работе применяемого устройства по преобразованию энергии и увеличение его нагрузочной способности.
Цель достигается тем, что используют выталкивающую силу Архимеда, перемещающую под водой по замкнутой траектории рабочие элементы-поплавки, связанные со средством вывода их из равновесного состояния, при этом применяют на разных уровнях воды средства нагрева и охлаждения рабочих элементов-поплавков, в качестве средства вывода рабочих элементов-поплавков из равновесного состояния применяют термобиметаллический привод путем перемещения их в радиальном направлении, а нагрев и охлаждение термобиметаллического привода осуществляют за счет забора воды внутрь него при прохождении по окружности через зоны нагрева и охлаждения.
Устройство для осуществления указанного способа преобразования гидростатической и тепловой энергии в механическую энергию вращения содержит основание, на котором установлен ротор, на ободе которого равномерно по замкнутой кривой размещены рабочие элементы-поплавки, связанные со средством вывода их из равновесного состояния, отличающееся тем, что оно снабжено средствами нагрева и охлаждения рабочих элементов-поплавков, камерами с клапанами впуска и выпуска жидкости из зон нагрева и охлаждения и механизмом управления клапанами, при этом верхняя часть ротора размещена в пределах зоны нагрева, а нижняя в пределах зоны охлаждения, средство вывода рабочих элементов-поплавков из равновесного состояния выполнено в виде термобиметаллического привода, соединенного с рабочими элементами-поплавками с возможностью перемещения их в радиальном направлении, и установлено в камерах, а на основании на траектории движения последних, в зонах нагрева и охлаждения размещены механизмы управления клапанов с обеих сторон от вертикали, проходящей через ось ротора.
Ротор выполнен из полых конструктивных элементов, удельный вес которых равен или близок к удельному весу жидкости.
Термобиметаллический привод выполнен в виде термобиметаллической пластины, размещенной в камере и неподвижно прикрепленной в средней части к основанию последней, при этом концы пластин через шарниры связаны с рычажным механизмом, соединенным с рабочим элементом-поплавком.
Термобиметаллический привод дополнительно снабжен несколькими термобиметаллическими пластинами, концы которых шарнирно связаны между собой.
Термобиметаллический привод выполнен в виде витой или винтовой пружины, активный и пассивный слои в которой расположены относительно друг друга в противоположных направлениях вдоль осевой линии пружины, а с ее концами через шарниры связан рычажный механизм, соединенный с рабочим элементом-поплавком.
Механизм управления клапанами камеры выполнен в виде установленных на основании направляющих, расположенных в зонах нагрева и охлаждения, а клапаны камер выполнены в виде установленных на осях створок с рычагами, установленными с возможностью взаимодействия с направляющими при вращении ротора. Основание выполнено в виде опор ротора и установлено на дне водоема. Основание выполнено в виде понтона, связанного с дном водоема через гибкие связи.
Указанные существенные признаки, характеризующие изобретение, при использовании природных водоемов устраняют необходимость сжигания топлива или использования искусственно получаемого рабочего тела в любом его виде, а также расходования других материальных средств для получения энергии. Использование для этой цели разности температур нагрева морской воды на различной глубине позволяет применять неиссякаемый природный источник энергии и определяет условия работы предложенного устройства практически в режиме вечного двигателя. Осуществимость этого подтверждается следующими примерами использования предложенного способа преобразования энергии в реальных условиях.
Мировой океан и его моря являются естественными неиссякаемыми источниками энергии. Среднегодовая температура поверхностных вод океана равна 17,5оС, а у экватора до 28оС. При этом сезонные колебания температуры наблюдаются до глубины 100-150 м и в придонном слое она постоянна и составляет примерно 1,5оС. Следовательно, средний перепад температуры нагрева вод Мирового океана в пределах указанных глубин составляет 16,0оС и максимальный до 26,5оС. У высокотемпературных термальных вод такой перепад температуры нагрева между нагретыми и охлажденными за счет теплоотдачи в атмосферу слоями может достигать 70-80оС (≈100-20оС).
Возможность механического перемещения тел при изменении температуры нагрева биметаллических элементов подтверждается известными устройствами. Например, термограф обеспечивает перемещение регистрирующих устройств при изменениях температуры нагрева в долях или единицах градусов Цельсия. В то же время возможно многократное увеличение нагрузочной способности и амплитуды перемещения биметаллических элементов, что подтверждается приведенными на фиг. 3-6 частными случаями их выполнения.
Стоимость осуществления предложенного способа преобразования энергии ниже затрат на получение энергии с использованием известных способов и устройств, поскольку отпадает необходимость поиска месторождений и добычи топлива, его транспортировки, сжигания с загрязнением окружающей среды, захоронения отходов (золы, радиоактивных веществ и др.). В сравнении с ГЭС нет надобности возведения плотин с затоплением земель. При этом не требуется отчуждения земельных участков под водохранилища, здания и сооружения. Какие-либо отдаленные по времени отрицательные последствия от использования предложенного технического решения для получения механической энергии исключены.
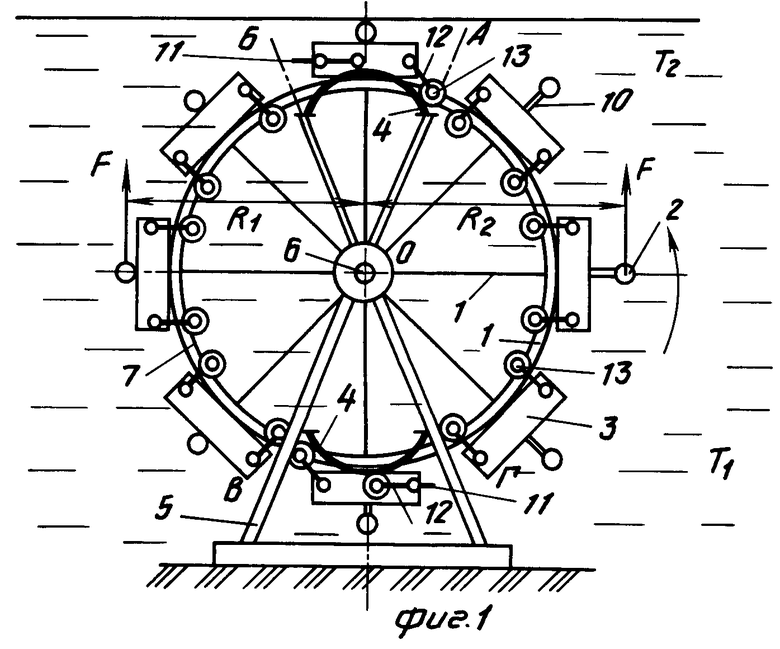
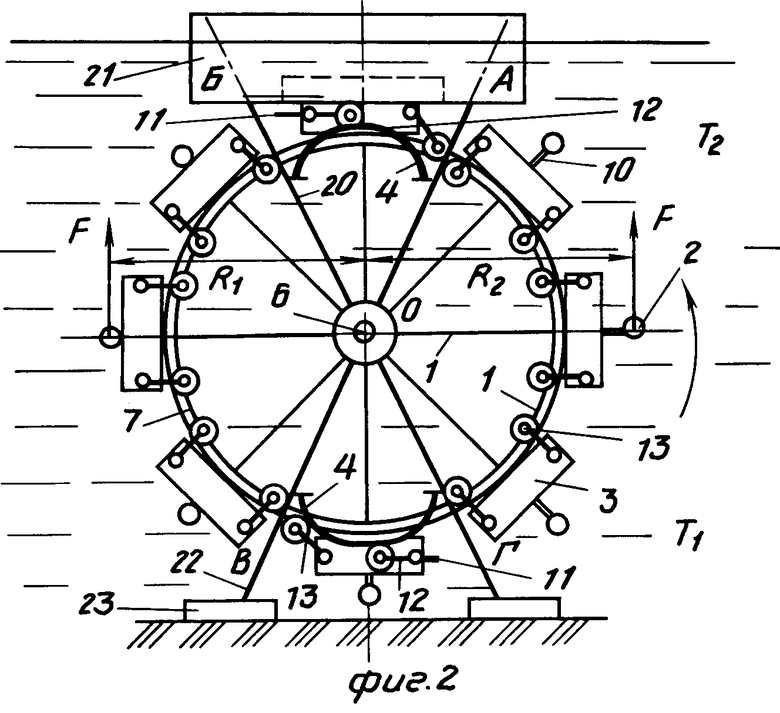
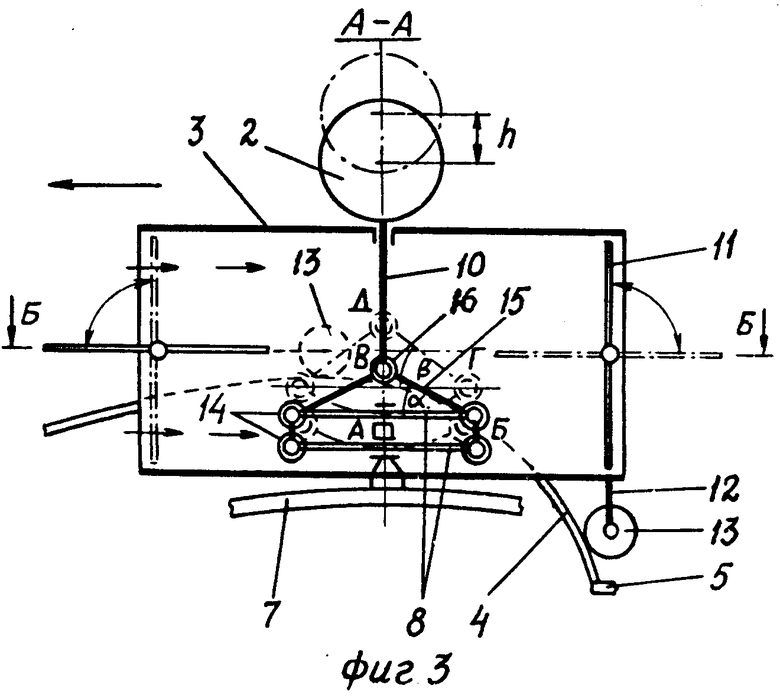
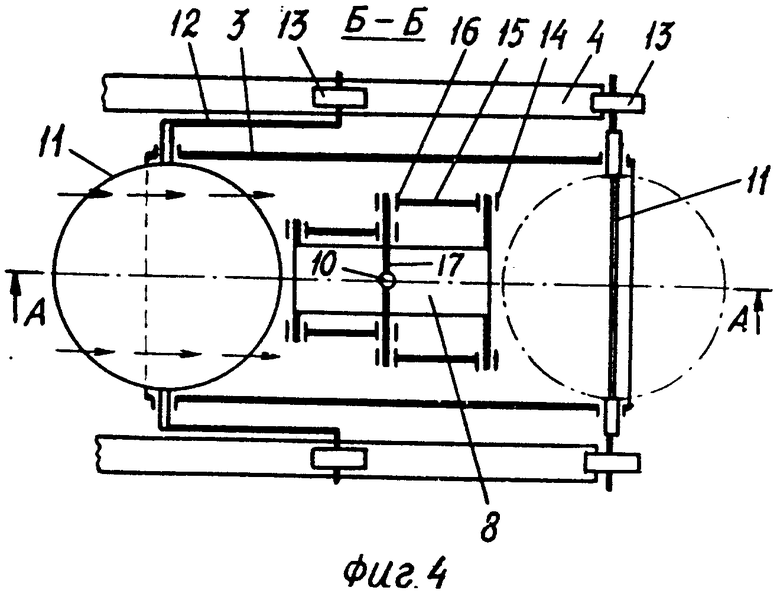
На фиг. 1 и 2 показаны общие схемы осуществления способа преобразования энергии и даны общие виды предложенного устройства в двух частных случаях выполнения; на фиг. 3 и 4 показан частный случай выполнения камеры с термобиметаллическим приводом, содержащим биметаллические пластины; на фиг. 5 и 6 изображен термобиметаллический привод с использованием биметаллического элемента в виде пружины.
Способы преобразования гидростатической и тепловой энергии в механическую энергию вращения заключается в том, что используют выталкивающую силу Архимеда в условиях разной температуры нагрева жидкости на различной глубине, в частности в условиях естественного перепада температуры нагрева морской воды в зависимости от глубины водоема, и за счет этого поддерживают постоянную одностороннюю неуравновешенность действующих на ротор выталкивающих сил Архимеда относительно вертикали, проходящей через его ось. Для этого применяют установленный на горизонтальной оси 0 с возможностью свободного вращения ротор 1, который целиком погружают в жидкость. На ободе ротора равномерно по окружности располагают рабочие элементы-поплавки 2 и обеспечивают их возможность перемещения в радиальном направлении, для чего поплавки связывают с термобиметаллическими приводами, содержащими биметаллические элементы, которые располагают в установленных на ободе ротора камерах 3. Камеры при помощи механизмов 4 управления делают проточными при нахождении в пределах верхнего АОБ и нижнего ВОГ секторов круга ротора и обеспечивают изолированность их полостей от окружающей жидкости во время движения в пределах боковых секторов БОВ и ГОА круга ротора. При этом в верхнем секторе АОБ проточные полости камер заполняют жидкостью с более высокой температурой нагрева Т2, обеспечивают соответствующее нагревание расположенных в камерах термобиметаллических приводов и поддержание их в нагретом состоянии при движении закрытых камер сверху вниз в пределах бокового сектора БОВ. Таким же образом обеспечивают заполнение камер жидкостью с меньшей температурой нагрева Т1 при движении камер в пределах нижнего сектора ВОГ и поддержание термобиметаллических приводов в менее нагретом состоянии при движении камер снизу вверх в пределах другого бокового сектора ГОА. Циклически изменяющуюся тепловую деформацию биметаллических элементов используют для приведения в действие термобиметаллических приводов, с помощью которых производят радиальные автоматические перемещения рабочих элементов-поплавков 2 в сторону от оси 0 ротора 1 в пределах бокового сектора ГОА и приближение их к оси 0 при движении в пределах бокового сектора БОВ. Минимальное удаление поплавка от оси 0 в секторе БОВ составляет R1 и максимальное удаление от оси в секторе ГОА R2. Для поплавков 2, находящихся на противоположных концах горизонтального диаметра ротора, противоположно направленные относительно оси 0 вращающие моменты, создаваемые выталкивающей силой Архимеда F, действующей на поплавки 2, соответственно составят FR1 и FR2 при большей величине второго из этих вращающих моментов по сравнению с первым в связи с большей длиной радиуса R2 по сравнению с R1. Этим обеспечивают вращение ротора в сторону действия большего по величине вращающего момента FR2, в данном случае против часовой стрелки. На фиг. 1 и 2 направление вращения ротора показано стрелкой в правой части изображения.
Из сказанного следует, что механическую энергию вращения при описываемом способе можно получать за счет теплообмена между слоями жидкости с разной температурой нагрева без использования каких-либо иных топливно-энергетических ресурсов. Этим обеспечивается достижение в полной мере цели изобретения. Относительно малая нагрузочная способность способа в связи с небольшой разностью температуры нагрева жидкости на разной глубине компенсируется минимальными затратами средств на получение механической энергии вращения. Повышение развиваемой при этом мощности достигается увеличением размеров ротора.
Указанный способ преобразования энергии может быть осуществлен в устройстве, два частных случая выполнения которого приведены в графических материалах на фиг. 1-6.
Устройство для осуществления описываемого способа преобразования энергии содержит размещенный на основании 5 и горизонтальном валу 6 с возможностью свободного вращения ротор 1, который погружен в жидкость, имеющую меньшую температуру нагрева Т1 в нижних слоях по сравнению с более высокой температурой нагрева Т2 в верхних слоях. На ободе ротора 7 равномерно по окружности установлены камеры 3, внутри которых с креплением к ротору размещены термобиметаллические приводы, соединенные с рабочими элементами-поплавками 2 и содержащие в своем составе биметаллические элементы 8, 9, у которых одинаковые слои активные или пассивные у всех элементов обращены в одну сторону относительно оси 0 ротора и которые при помощи жесткой связи 10 соединены с поплавками 2 с возможностью перемещения их в радиальном направлении при тепловой деформации.
Противоположные стенки камер 3, обращенные вдоль окружности ротора, являются клапанами, выполненными в виде створок 11, оси которых в виде цапф жестко соединены с рычагами 12. На свободных концах рычагов размещены ролики 13 с возможностью контактного взаимодействия с механизмами управления клапанов, выполненными в виде направляющих 4, неподвижно закрепленных на основании 5 или его продолжении выше оси 0 соответственно в зонах охлаждения или нагрева с обеих сторон от вертикали, проходящей через ось 0 ротора. Направляющие 4 представляют собой изогнутые опорные поверхности, размещенные в верхнем АОБ и нижнем ВОГ секторах круга ротора. Расположение оконечностей направляющих 4 и длина рычагов 12 створок 11 клапанов камер обеспечивают вхождение роликов 13 в контакт с направляющими и прекращение этого контакта с соответствующим поворотом створок 11 клапанов и открыванием и закрыванием камер в четырех местах окружности ротора, расположенных попарно в верхнем и нижнем секторах ротора с обеих сторон от вертикали, проходящей через ось 0 ротора.
Ротор 1, 7 выполнен из полых конструктивных элементов, совокупный удельный вес которых близок к удельному весу жидкости, что обеспечивается, например, применением полых трубчатых материалов. Конкретное выполнение термобиметаллического привода зависит от устройства применяемого биметаллического элемента.
Как частный случай выполнения (фиг. 3, 4), термобиметаллический привод содержит биметаллический элемент в виде по меньшей мере одной биметаллической пластины 8, неподвижно закрепленной в камере 3 в своей средней части, с концами которой при помощи шарниров 14 пластины в виде осей связаны своими концами рычаги 15, которые при помощи шарнира 16 рычагов также связаны друг с другом вторыми своими концами, а к оси 17 шарнира рычагов посредством жесткой связи 10 присоединен рабочий элемент-поплавок 2.
В целях повышения нагрузочной способности термобиметаллического привода применяется несколько параллельных биметаллических пластин 8, концы которых связаны друг с другом при помощи шарниров 14 пластин.
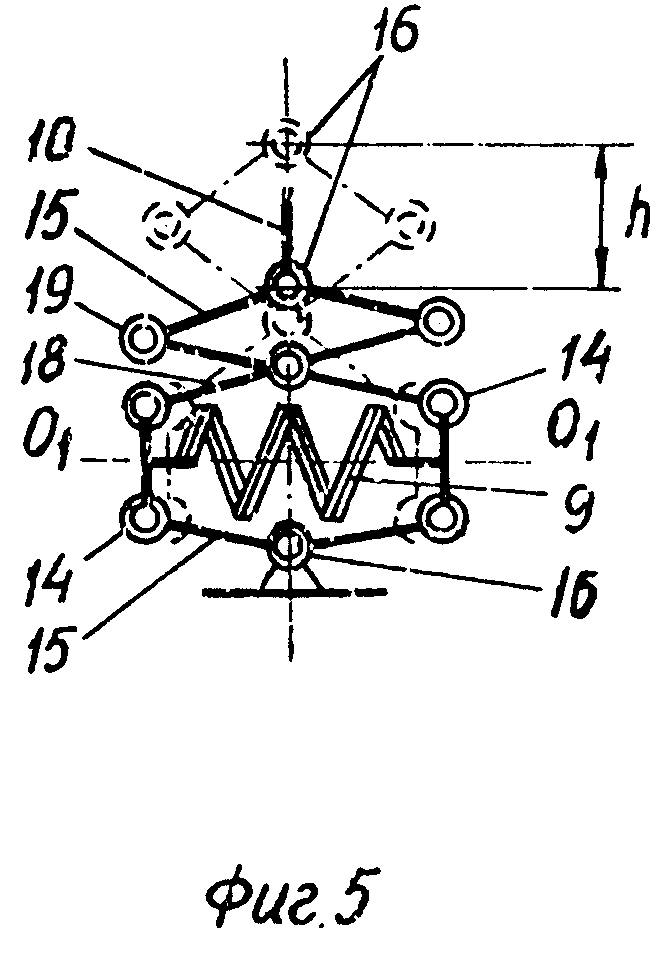
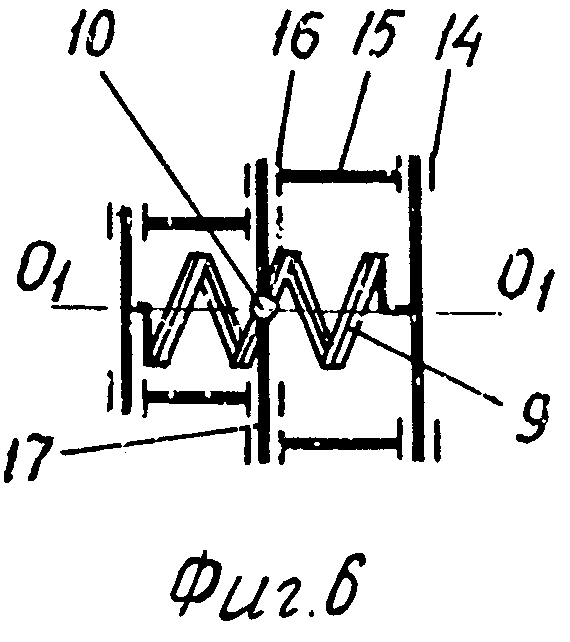
Как частный случай выполнения (фиг. 5, 6), термобиметаллический привод содержит по меньшей мере один биметаллический элемент в виде витой или винтовой пружины 9, активный и пассивный слои которого расположены относительно друг друга в противоположных направлениях вдоль осевой линии 01-01 фигуры пружины, а с ее концами при помощи шарниров 14 биметаллического элемента связаны своими концами рычаги первого 18 или второго 15 рода, которые связаны друг с другом шарниром 16 рычагов и образуют пары рычагов, последняя из этих пар связана с рабочим элементом-поплавком 2. В целях повышения нагрузочной способности привода применяется несколько последовательно и/или параллельно установленных пружин, связанных с каждой парой рычагов. Основание, выполненное в виде опор 5 ротора 1, установлено на дне водоема. Основание выполнено в виде понтона 21, связанного с дном водоема через гибкие связи 20, 22, закрепленные на массивных якорях 23.
Устройство для преобразования энергии работает следующим образом.
При неподвижном роторе 1 в исходном положении полости камер 3, находящихся в верхней части ротора, заполнены жидкостью с более высокой температурой Т2 нагрева, а полости камер, расположенных в нижней части ротора, заполнены жидкостью, имеющей меньшую температуру нагрева Т1. В связи с этим под действием термобиметаллических приводов рабочие элементы-поплавки 2 в нижней части ротора находятся на большем расстоянии R2 от оси 0 ротора по сравнению с поплавками в верхней части ротора. Для приведения в действие устройства ротор поворачивается на оси в пределах до четверти оборота в сторону его последующего вращения и при этом выводится из равновесного положения относительно оси 0 в связи с разной величиной плеча действия выталкивающих сил F Архимеда, воздействующих на поплавки, находящиеся по разную сторону от вертикали, проходящей через ось 0 ротора. Вследствие этого ротор приводится во вращение, которое в последующем автоматически постоянно поддерживается за счет неуравновешенности ротора относительно оси 0, что подробно показано выше при описании способа преобразования энергии. Постоянство разных по величине расстояний R2 и R1 поплавков от оси 0 ротора при нахождении их в пределах соответствующих боковых секторов ГОА и БОВ обеспечивается тем, что в пределах бокового сектора БОВ изолированные от окружающей жидкости камеры 3 заполнены жидкостью с более высокой температурой нагрева Т2, которая поступила в эти камеры при движении их с открытыми створками 11 клапанов в пределах верхнего сектора АОБ. Соответственно при движении камер с закрытыми створками клапанов в пределах другого бокового сектора ГОА они заполнены жидкостью с меньшей температурой нагрева Т1, которая поступила в эти камеры при движении их с открытыми створками в пределах нижнего сектора ВОГ. Открывание и закрывание створок осуществляют за счет поворота рычагов 12 при их взаимодействии с направляющими опорными поверхностями механизмов управления клапанов. Прямолинейное движение поплавков 2 в радиальном направлении относительно оси 0 обеспечивается симметричностью элементов термобиметаллических приводов относительно линий радиусов, проходящих через ось ротора, середины биметаллических элементов и шарниры 16 рычагов 15, 18.
Нагрузочная способность термобиметаллических приводов и связанная с этим возможность применения рабочих элементов-поплавков 2 большого объема, обеспечивающих получение больших выталкивающих сил Архимеда, повышаются путем применения в каждом приводе нескольких биметаллических элементов 8, 9.
Амплитуда перемещения поплавков в радиальном направлении увеличивается за счет применения в составе термобиметаллических приводов связанной шарнирами 14, 16, 19 системы рычагов, что показано графически на фиг. 3 и 5. В исходном положении угол между рычагом 15 и биметаллической пластиной 8 имеет величину α При этом высота АВ прямоугольного треугольника АБВ равна БВ sin α а сторона АБ БВ cos α После изгиба пластины треугольник АБВ трансформируется в прямоугольный треугольник ВГД, при этом длина рычага 15 остается неизменной, т.е. БВ ГД, а длина ВГ меньше АБ в связи с изгибом пластины. Следовательно, угол β больше угла α В связи с этим sin β больше чем sin α т.е. ВД больше чем АВ. Амплитуда перемещения поплавка дополнительно увеличивается путем применения системы последовательно установленных связанных шарнирами рычагов (см. фиг. 5).
Использование: энергетика, в частности комплексное совместное преобразование гидростатистической и тепловой энегрии в механическую энергию вращения. Сущность изобретения: используют выталкивающую силу жидкости в условиях разной температуры нагрева жидкости на различном уровне, в частности разной температуры нагрева морской воды в зависимости от глубины. Для этого ротор целиком погружают в жидкость, в камерах, равномерно установленных на окружности ротора, размещают термобиметаллические приводы, содержащие биметаллические элементы, связанные с поплавками. Устройство для осуществления способа преобразования энегрии содержит погруженный в жидкость ротор, на ободе которого равномерно по окружности установлены камеры, внутри которых размещаются приводы, включающие элементы, с которыми связаны поплавки. Противоположные стенки камер являются клапанами, представляющими собой створки, к осям которых в виде цапф прикреплены рычаги, обеспечивающие поворот створок при взаимодействии с управляющими устройствами в виде направляющих, с которыми взаимодействуют концы рычагов с роликами при вращении ротора. Кроме того, ротор может быть установлен на опорах на дне водоема или с помощью несущих элементов на понтонах, которые удерживаются на месте при помощи массивных якорей. 2 с. и 7 з. п. ф-лы, 6 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Заявка ФРГ N 3021351, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
