Изобретение относится к способам преобразования энергии, в частности к способу комплексного совместного преобразования гравитационной и тепловой энергии в механическую энергию вращения, и к устройствам для осуществления этого способа, а именно к гравитационно-тепловым двигателям, и может быть использовано в качестве стационарного источника механической энергии.
Известен способ использования сил тяготения для создания вращательного движения, при котором производят управляемое опускание груза, связанного с рабочим колесом при помощи гибкой связи, взаимодействующей с валом колеса. Этот способ осуществляется, в частности, в механических часах с гиревым приводом [1]
Известен также способ преобразования гравитационной и тепловой энергии в механическую энергию вращения, заключающийся в изменении центра тяжести теплочувствительных элементов, равномерно установленных по окружности частично погруженного в жидкость ротора, с последовательным чередующимся их перемещением через зоны нагрева и охлаждения. Этот способ реализуется в устройстве в виде теплового двигателя, приводимого в действие гравитационными силами, содержащем основание, на котором установлен ротор, выполненный в виде колеса, на ободе которого равномерно по окружности размещены теплочувствительные элементы, связанные с газонаполненными сильфонными камерами и грузом в виде жидкости, и зоны нагрева и охлаждения [2]
К недостаткам указанного способа преобразователя энергии и устройства для осуществления этого способа относится невозможность их использования при плавном изменении температуры нагрева среды между зонами нагрева и охлаждения и при однородном составе указанной среды, поскольку при этих условиях ротор будет находиться в равновесном положении. Особенностью данного двигателя является его тихоходность, что связано с медленным изменением температуры нагрева газа, заполняющего сильфонные камеры, и соответствующим изменением их объема.
Цель изобретения получить механическую энергию вращения за счет теплообмена между слоями однородной среды, например жидкости, образующими зоны нагрева и охлаждения с плавным изменением температуры нагрева, а также повысить быстроходность двигателя и связанной с этим удельной мощности.
Указанный технический результат по способу достигается тем, что производят изменение центра тяжести теплочувствительных элементов, равномерно установленных по окружности погруженного в жидкость ротора, с последовательным чередующимся их перемещением через зоны нагрева и охлаждения, в качестве теплочувствительных элементов применяют термобиметаллические приводы, а в качестве грузов твердые тела, кинематически соединенные с последними, при этом ротор полностью погружают в воду, в которой нижние и верхние слои имеют разную температуру и являются зонами нагрева и охлаждения, причем нагрев и охлаждение термобиметаллических приводов осуществляют за счет забора воды внутрь них при прохождении по окружности через эти зоны.
Устройство для преобразования гравитационной и тепловой энергии в механическую энергию вращения, содержащее основание, на котором установлен ротор, выполненный в виде колеса, на ободе которого равномерно по окружности размещены теплочувствительные элементы, связанные с грузами, зоны нагрева и охлаждения; дополнительно снабжено камерами с клапанами впуска и выпуска жидкости из зон нагрева и охлаждения и механизмом управления клапанами, при этом теплочувствительные элементы выполнены в виде термобиметаллического привода, соединенного с грузами с возможностью перемещения их в радиальном направлении и установленного в камерах, а на основании, на траектории движения последних, размещены механизмы управления впускных и выпускных клапанов, установленные попарно в зонах нагрева и охлаждения с обеих сторон от вертикали, проходящей через ось ротора.
Ротор выполнен из полых конструкционных элементов, удельный вес которых равен удельному весу жидкости.
Ротор снабжен установленными равномерно по окружности поплавками.
Термобиметаллический привод выполнен в виде термобиметаллической пластины, размещенной в камере и неподвижно прикрепленной в средней части к основанию последней, при этом концы пластины посредством шарниров связаны с рычажным механизмом, соединенным с грузом.
Термобиметаллический привод дополнительно снабжен несколькими термобиметаллическими пластинами, концы которых шарнирно связаны между собой.
Термобиметаллический привод выполнен в виде винтовой пружины, активный и пассивный слои в которой расположены относительно друг друга в противоположных направлениях вдоль осевой линии пружины, а с ее концами посредством шарниров связан рычажный механизм, соединенный с грузами.
Механизм управления входных и выходных клапанов камер выполнен в виде установленных на основании направляющих, расположенных в зонах нагрева и охлаждения, а клапаны камер выполнены в виде установленных на осях створок с рычагами, смонтированными с возможностью периодического взаимодействия с направляющими при вращении ротора.
Основание устройства установлено на дне водоема.
Опоры ротора выполнены в виде понтонов, закрепленных на основании посредством якорей, причем понтоны обладают свойством избыточной плавучести с учетом веса ротора.
Связи понтонов с якорями выполнены гибкими с возможностью их удлинения.
Предлагаемый способ преобразования энергии и устройство для его осуществления позволяют, в частности, использовать для получения механической энергии вращения разность температуры нагрева морской воды на различной глубине, которая в пределах глубин 100-150 м относительно постоянна и колеблется в разных районах Мирового океана в пределах от 16,0 до 26,0оС, и определяют условия работы устройства практически в режиме вечного двигателя, поскольку при этом используется неиссякаемый природный источник энергии.
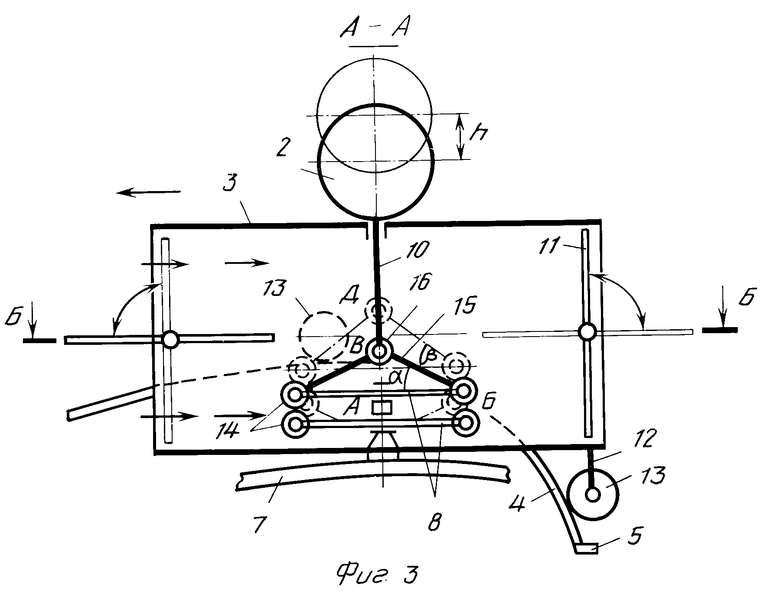
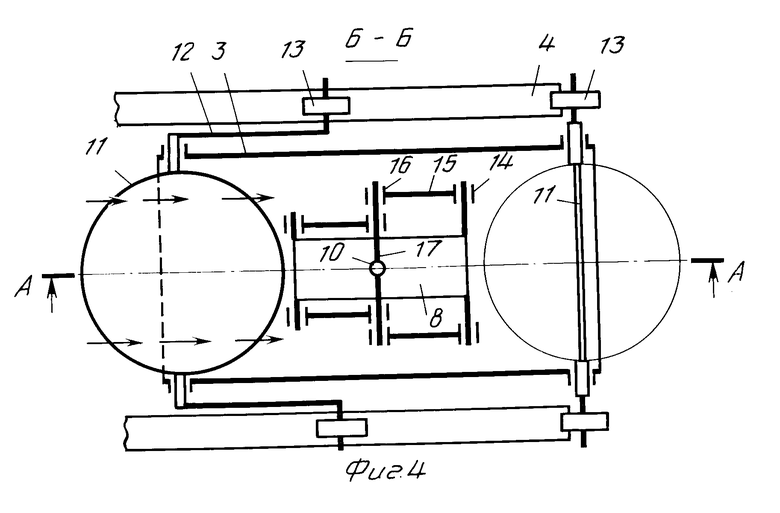
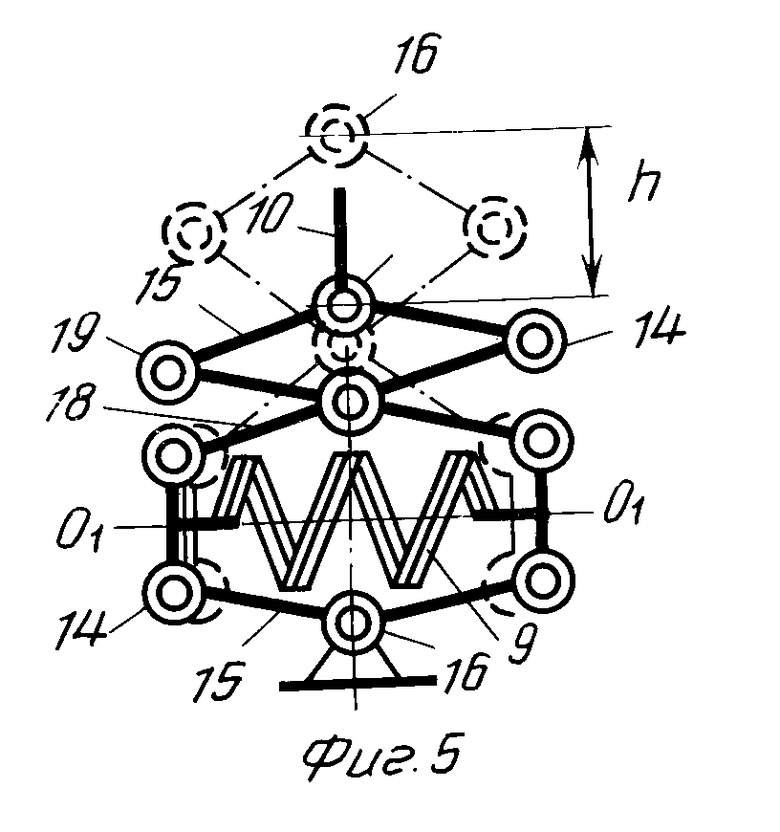
На фиг. 1 и 2 показаны общие схемы осуществления способа преобразования энергии и даны общие виды предлагаемого устройства, два варианта; на фиг.3 и 4 частный случай выполнения камеры с термобиметаллическим приводом, содержащим термобиметаллические пластины, две проекции; на фиг.5 и 6 термобиметаллический привод с использованием термобиметаллической пружины, две проекции.
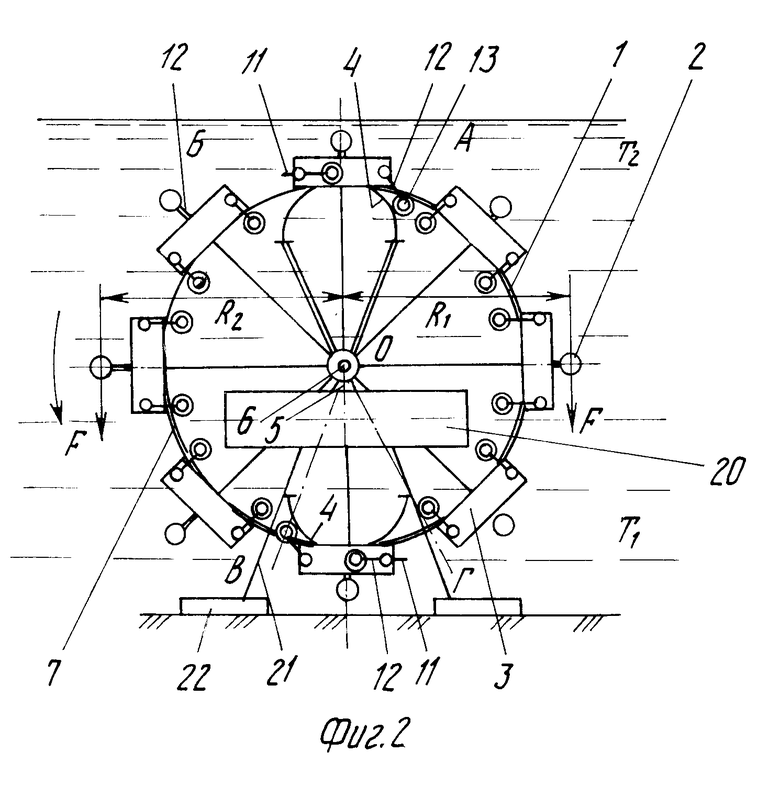
Способ преобразования гравитационной и тепловой энергии в механическую энергию вращения заключается в том, что используют гравитационное взаимодействие в условиях разной температуры нагрева жидкости на различной глубине, в частности в условиях естественного перепада температуры нагрева морской воды в зависимости от глубины водоема, и за счет этого поддерживают постоянную одностороннюю неуравновешенность совокупной массы вращающегося ротора относительно вертикали, проходящей через его ось. Для этого применяют установленный на горизонтальной оси О с возможностью свободного вращения ротор 1, который целиком погружают в жидкость. На ободе ротора равномерно по окружности размещают грузы 2 и обеспечивают им возможность перемещения в радиальном направлении, для чего грузы связывают с термобиметаллическими приводами, которые располагают в установленных на ободе ротора камерах 3. Эти камеры при помощи механизмов управления 4 делают проточными при нахождении в пределах верхнего АОБ и нижнего ВОГ секторов круга ротора и обеспечивают изолированность их полостей от окружающей жидкости во время движения в пределах боковых секторов БОВ и ГОА круга ротора. При этом в верхнем секторе АОБ проточные полости камер заполняют жидкостью с более высокой температурой нагрева, обеспечивают соответствующее нагревание расположенных в камерах термобиметаллических приводов и поддержание их в нагретом состоянии при движении закрытых камер сверху вниз в пределах бокового сектора БОВ. Таким же образом обеспечивают заполнение камер жидкости с меньшей температурой нагрева при движении камер в пределах нижнего сектора ВОГ и поддержание термобиметаллических приводов в менее нагретом состоянии при движении камер снизу вверх в пределах другого бокового сектора ГОА.
При помощи термобиметаллических приводов производят радиальные автоматические перемещения грузов 2 в сторону от оси 0 ротора 1 в пределах бокового сектора БОВ и приближение их к оси О при движении в пределах бокового сектора ГОА Минимальное удаление груза от оси О в секторе ГОА составляет R1 и максимальное удаление от оси в секторе БОВ R2. Для грузов 2, находящихся на противоположных концах горизонтального диаметра ротора, противоположно направленные относительно оси О вращающие моменты, создаваемые весом F грузов, соответственно составят FR1 и FR2 при большей величине второго из этих вращающих моментов по сравнению с первым в связи с большей длиной радиуса R2 по сравнению с радиусом R1. Этим обеспечивают вращение ротора в сторону действия большего по величине вращающего момента FR2, в данном случае против часовой стрелки. На фиг.1 и 2 направление вращения ротора показано стрелкой в левой части изображения.
Следовательно, механическую энергию вращения при предлагаемом способе по- лучают за счет теплообмена между слоями жидкости с разной температурой нагрева без использования каких-либо иных топливно-энергетических ресурсов. Относительно малая нагрузочная способность способа в связи с небольшой разностью температуры нагрева жидкости на разной глубине компенсируется минимальными затратами средств на получение механической энергии вращения и экологической чистотой преобразования энергии. Повышение развиваемой при этом мощности достигается увеличением размеров ротора, который по условиям осуществления способа с использованием разности температуры нагрева морской воды на различной глубине может иметь в диаметре до 100-150 м и нести на себе сотни термобиметаллических приводов с грузами.
Предлагаемый способ преобразования гравитационной и тепловой энергии в механическую энергию вращения может быть осуществлен в устройстве, два частных случая выполнения которого приведены на фиг.1-6.
Устройство для осуществления предлагаемого способа преобразования энергии содержит установленный на опорах 5 и горизонтальном валу 6 с возможностью свободного вращения ротор 1, который полностью погружен в жидкость с более низкой температурой нагрева Т1 в нижних слоях по сравнению с более высокой температурой нагрева Т2 в верхних слоях. На ободе 7 ротора равномерно по окружности установлены камеры 3, внутри которых с креплением к ротору размещены термобиметаллические приводы 8 и 9, у которых одинаковые слои активные или пассивные у всех элементов, обращены в одну сторону относительно оси О ротора и которые при помощи жесткой связи 10 соединены с грузами 2 с возможностью перемещения их в радиальном направлении при тепловой деформации. Противоположные стенки камер 3, обращенные вдоль окружности ротора, являются клапанами, выполненными в виде створок 11, оси которых жестко соединены с рычагами 12, на свободных концах рычагов размещены ролики 13 с возможностью контактного взаимодействия с механизмом управления 4, выполненным в виде направляющих, неподвижно закрепленных на опорах 5 или их продолжениях выше оси О. Направляющие 4 выполнены в виде изогнутых опорных поверхностей, расположенных в верхнем АОБ и нижнем ВОГ секторах круга ротора. Расположение оконечностей направляющих 4 и длина рычагов 12 створок 11 клапанов камер обеспечивают вхождение роликов 13 в контакт с направляющими 4 и прекращение этого контакта с соответствующим поворотом створок 11 клапанов и открыванием и закрыванием камер в четырех местах окружности ротора, расположенных попарно в верхнем и нижнем секторах ротора с обеих сторон от вертикали, проходящей через ось О ротора. Ротор выполнен из конструкционных материалов, совокупный удельный вес которых близок к удельному весу жидкости, что обеспечивается применением полых конструкционных элементов или креплением к ротору поплавков, установленных равномерно по окружности, не нарушающих его балансировку.
Как частный случай выполнения (фиг.3 и 4), термобиметаллический привод содержит по меньшей мере одну термобиметаллическую пластину 8, неподвижно закрепленную в своей средней части, с концами которой при помощи шарниров 14 пластины в виде осей связаны своими концами рычаги 15, которые при помощи шарнира 16 рычагов также связаны друг с другом другими своими концами, а к оси 17 шарнира рычагов посредством жесткой связи 10 присоединен груз 2. Для повышения нагрузочной способности термобиметаллического привода может применяться несколько параллельных термобиметаллических пластин 8, концы которых связаны друг с другом при помощи шарниров 14 пластин.
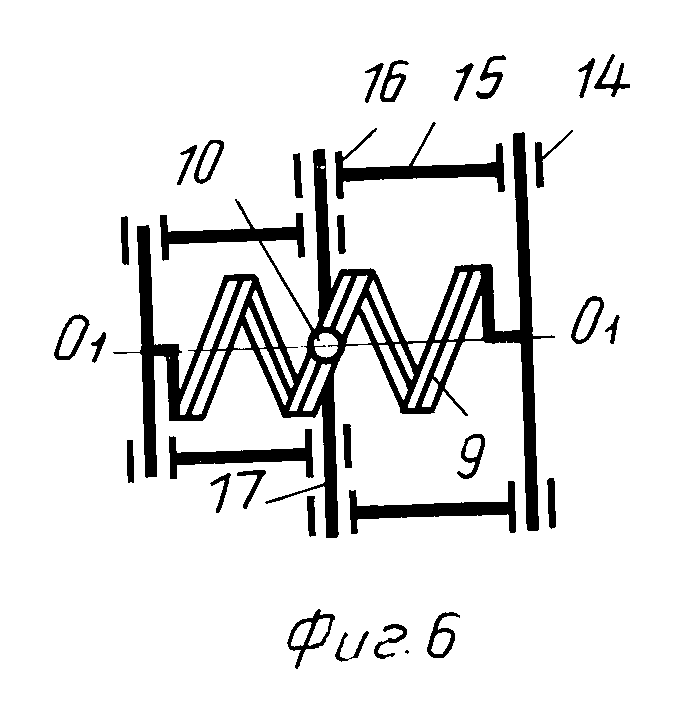
Как частный случай выполнения (фиг.5 и 6) термобиметаллический привод выполнен в виде витой или винтовой термобиметаллической пружины 9, активный и пассивный слои которой расположены относительно друг друга в противоположных направлениях вдоль осевой линии О1-О1 фигуры пружины, а с ее концами при помощи шарниров 14 связаны своими концами рычаги первого 18 или второго 15 рода, которые связаны друг с другом шарниром 16 рычагов и образуют пары рычагов. При этом с целью увеличения амплитуды действия привода при его тепловой деформации может применяться несколько последовательно расположенных пар рычагов, связанных друг с другом шарнирами 19 пар рычагов.
Опоры 5 ротора в виде жестких конструкций могут быть установлены на дне водоема, которое служит основанием для всего устройства (см. фиг.1).
Как частный случай выполнения (см. фиг.2) опоры 5 ротора установлены на основании в виде расположенных по обе стороны ротора и погруженных в жидкость понтонов 20, имеющих избыточную плавучесть с учетом веса ротора и удерживаемых на месте в погруженном состоянии при помощи гибких связей 21, соединенных с массивными якорями 22, с возможностью удлинения этих связей и всплытия понтонов вместе с ротором на повеpхность жидкости.
Устройство для преобразования энергии работает следующим образом.
При неподвижном роторе 1 в исходном положении полости камер 3, находящихся в верхней части ротора, заполнены жидкостью с более высокой температурой Т2, а полости камер, расположенные в нижней части ротора, заполнены жидкостью, имеющей меньшую температуру нагрева Т1. В связи с этим под действием термобиметаллических приводов грузы 2 в верхней части ротора находятся на большем расстоянии от оси О ротора по сравнению с грузами в нижней части ротора. Для приведения в действие устройства ротор поворачивается на оси в пределах до четверти оборота в сторону его последующего вращения и при этом выводится из равновесного положения относительно оси О в связи с разной величиной плеча действия сил тяготения F, воздействующих на грузы, находящиеся по разную сторону от вертикали, проходящей через ось О ротора. Вследствие этого ротор приводится во вращения, которое в последующем автоматически постоянно поддерживается за счет неуравновешенности ротора относительно оси О, что подробно показано выше при описании способа преобразования энергии. Постоянство разных по величине расстояний R1 и R2 грузов от оси О ротора при нахождении их в пределах соответствующих боковых секторов ГОА и БОВ обеспечивается тем, что в пределах бокового сектора БОВ изолированные от окружающей жидкости камеры 3 заполнены жидкостью с более высокой температурой Т2, которая поступила в эти камеры при движении их с открытыми створками 11 клапанов в пределах верхнего сектора АОБ. Соответственно, при движении камер с закрытыми створками клапанов в пределах другого бокового сектора ГОА, они заполнены жидкостью с меньшей температурой нагрева Т1, которая поступила в эти камеры при движении их с открытыми створками 11 клапанов в пределах нижнего сектора ВОГ. Открывание и закрывание створок клапанов осуществляется за счет поворота рычагов 12 при их взаимодействии с направляющими опорными поверхностями механизма управления 4. Прямолинейное движение грузов 2 в радиальном направлении относительно оси О обеспечивается симметричностью элементов термобиметаллических приводов относительно линий радиусов, проходящих через ось О ротора и шарниры 16 рычагов 15 и 18. Возможность применения более массивных грузов 2 обеспечивается за счет кинематического соединения нескольких термобиметаллических приводов 8 и 9.
Амплитуда перемещения грузов в радиальном направлении увеличивается за счет применения в составе термобиметаллических приводов связанной шарнирами 14, 16 и 19 системы рычагов (фиг.3). В исходном положении угол между рычагом 15 и термобиметаллической пластиной 8 имеет величину α При этом высота АВ прямоугольного треугольника АБВ равна БВsin α а сторона АБ=БВ cos α После изгиба пластины треугольник АБВ трансформируется в прямоугольный треугольник ВГД, при этом длина рычага 15 остается неизменной, т.е. БВ=ГД, а длина ВГ меньше АБ в связи с изгибом пластины. Следовательно, угол β больше угла α В связи с этим sin β больше чем sin α т.е. ВД больше АВ. Амплитуда перемещения груза дополнительно увеличивается путем применения системы последовательно установленных связанных шарнирами рычагов.
Использование: энергетика. Сущность изобретения: ротор 1 погружают в жидкость, в камерах 3, равномерно установленных по окружности ротора, размещают термометаллические приводы, содержащие биметаллические элементы, связанные с грузами 2, противоположные стенки камер выполнены в виде створок 11, к осям которых в виде цапф прикреплены рычаги 12, обеспечивающие поворот створок при взаимодействии с управляющими устройствами 4 в виде направляющих, с которыми взаимодействуют концы рычагов с роликами 13 при вращении ротора. Кроме того, ротор может быть установлен или на опорах 5 на дне водоема, или на понтонах 20, которые удерживаются на месте при помощи массивных якорей 22. 2 с. и 9 з. п. ф-лы, 6 ил.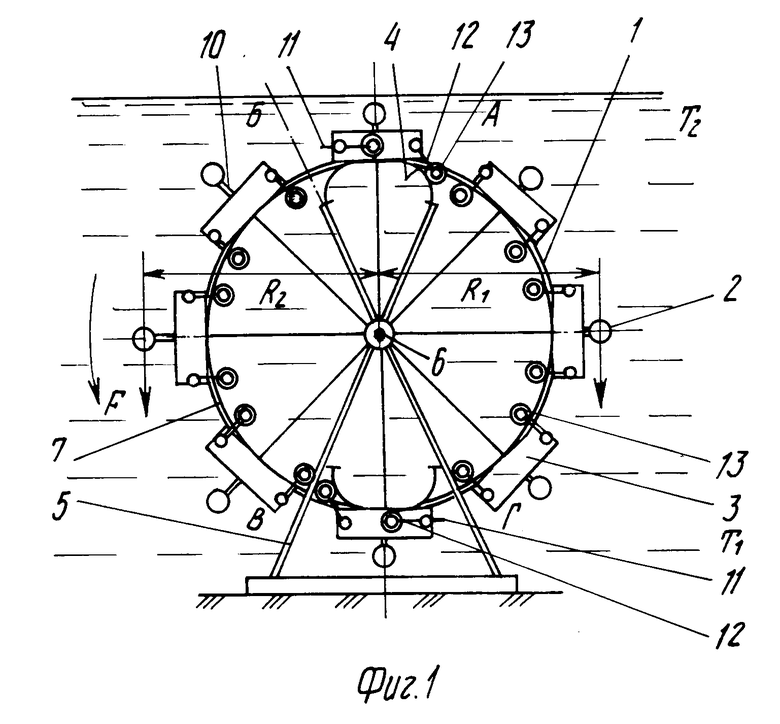
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4121420, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
