Изобретение относится к теплогравитационным двигателям, преобразующим гравитационную и тепловую энергию в механическую энергию вращения.
Известны устройства, использующие гравитационную энергию, в частности часы с гиревым приводом, содержащие груз, связанный с рабочим колесом при помощи гибкой связи [1]
Известен также тепловой двигатель, приводимый в действие гравитационными силами, содержащий основание, размещенный на нем частично погруженный в жидкость ротор, равномерно установленные на его поверхности теплочувствительные элементы с газонаполненными сильфонными камерами в полости ротора, взаимодействующими с находящимся в полости ротора грузом в виде жидкости, зоны нагрева и охлаждения [2]
К недостаткам этого теплового двигателя относятся тихоходность и малая удельная мощность, что обусловлено медленным изменением объема газа в сильфонных камерах при изменении температуры нагрева, а также невозможность работы двигателя при постепенном изменении температуры между зонами нагрева и охлаждения, поскольку при этих условиях ротор находится в равновесном положении.
Изобретение обеспечивает достижение технического результата (цели изобретения), заключающегося в повышении быстроходности и удельной мощности силовой установки, возможности ее работы при плавном, постепенном перепаде температуры между зонами нагрева и охлаждения, что позволяет применять эту установку с использованием разности температуры нагрева на разных уровнях в природных водоемах и получать экологически чистую энергию без расходования топливно-энергетических ресурсов и иных материальных средств.
Указанный технический результат достигается тем, что теплогравитационная силовая установка, содержащая основание, размещенный на нем ротор, равномерно установленные на его поверхности теплочувствительные элементы, грузы, зоны нагрева и охлаждения, снабжена камерами с клапанами впуска и выпуска жидкости из зон нагрева и охлаждения, при этом ротор выполнен в виде двух блоков с горизонтальными осями вращения, смещенных относительно друг друга по вертикали и с установленной на них замкнутой гибкой связью, теплочувствительные элементы выполнены в виде термобиметаллического привода и размещены в камерах, установленных на наружной поверхности гибкой связи, термобиметаллический привод кинематически соединен с грузами с возможностью их перемещения в направлении вертикальной оси, проходящей через оси блоков ротора, полностью погруженных в воду, в которой верхний и нижний слои имеют разную температуру и являются зонами нагрева и охлаждения.
Основание выполнено в виде понтона, а ротор соединен с ним через жесткие связи.
Термобиметаллический привод выполнен в виде термобиметаллической пластины, размещенной в камере и неподвижно закрепленной в средней части к основанию последней, при этом концы пластины посредством шарниров связаны с рычажным механизмом, соединенным с грузом. Термобиметаллический привод дополнительно снабжен несколькими термобиметаллическими пластинами, концы которых шарнирно связаны между собой.
Впускные и выпускные клапаны камер выполнены в виде установленных на осях с возможностью кругового поворота створок, на осях которых закреплены одноплечие рычаги с противовесами на концах. Каждая створка камеры выполнена в виде диска, по краю которого неподвижно закреплены дополнительные поперечные створки.
Указанные существенные признаки, характеризующие изобретение, позволяют получать механическую энергию при малых перепадах температуры рабочего тела, устраняют в ряде случаев необходимость сжигания топлива, а также расходования других материальных средств для приведения в действие теплогравитационной силовой установки. Использование для получения энергии вращения разности температуры нагрева морской воды, которая в пределах глубин от 100 до 150 м обычно составляет от 16 до 26оС в различных районах Мирового океана, позволяет применить неиссякаемый природный источник энергии и определяет условия работы данного устройства практически в режиме вечного двигателя. Еще большую эффективность преобразования энергии установка обеспечивает при использовании термальных вод или конденсационных вод с более высоким перепадом температуры их нагрева в верхних и нижних слоях.
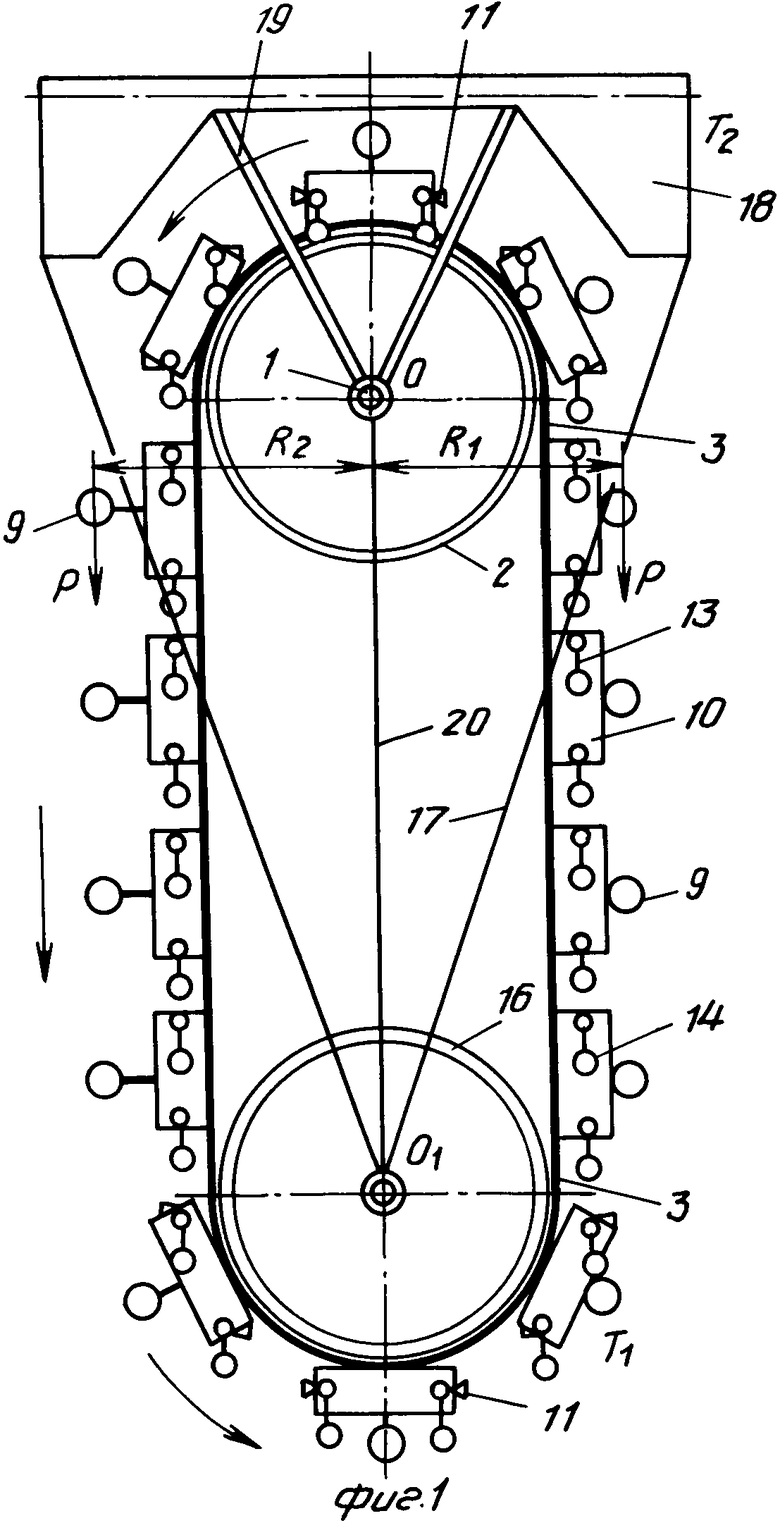
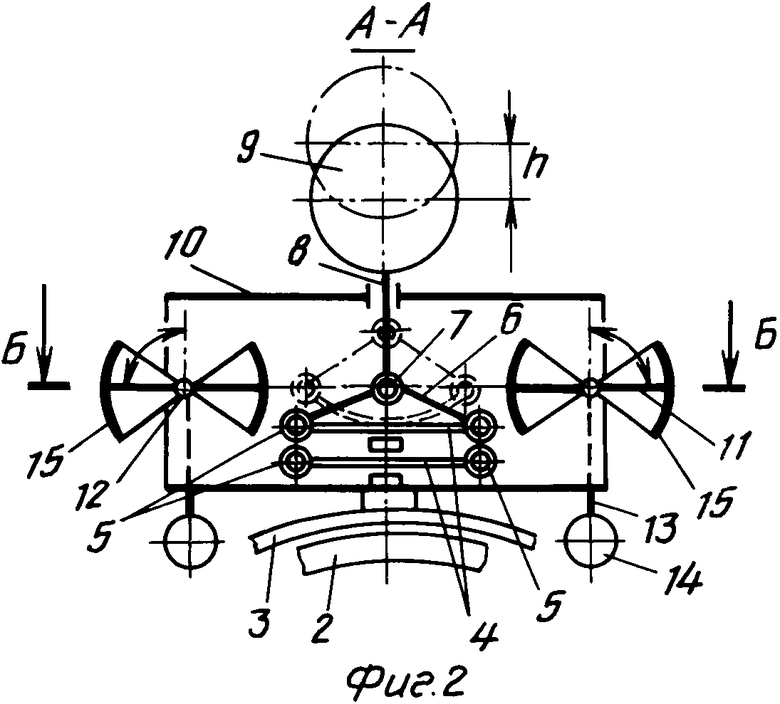
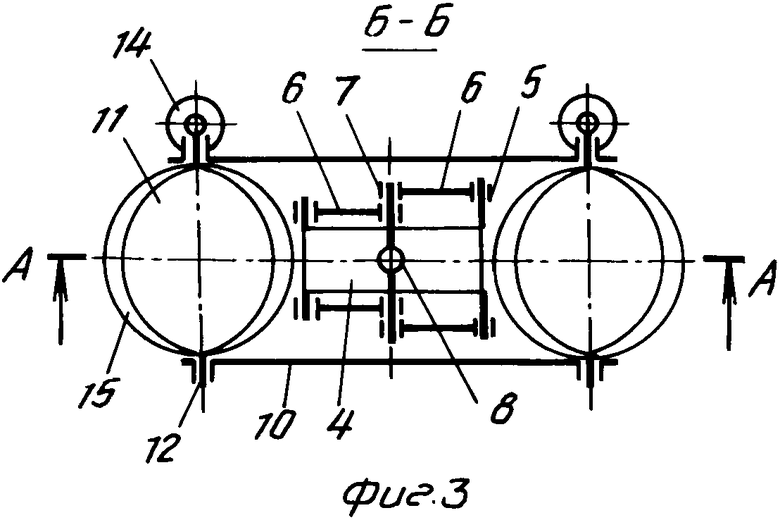
На фиг.1 приведена теплогравитационная силовая установка, общий вид; на фиг.2 и 3 показан пример выполнения камеры с термобиметаллическим приводом в двух проекциях.
Теплогравитационная силовая установка содержит установленный на горизонтальном валу 1 с возможностью вращения ротор, который целиком погружен в воду, с более низкой температурой Т1 нагрева в нижних слоях по сравнению с более высокой температурой Т2 нагрева в верхних слоях. Верхняя половина обода верхнего колеса 2 ротора охвачена замкнутой гибкой связью 3, которая провисает вниз за пределы этого колеса. К замкнутой гибкой связи 3 на равном расстоянии друг от друга прикреплены термобиметаллические приводы, выполненные в данном случае в виде термобиметаллической пластины 4, которая прикреплена к гибкой вязи 3 в своей средней части. У всех термобиметаллических пластин активные и пассивные слои обращены в одну сторону относительно замкнутой гибкой связи. С концами термобиметаллических пластин 4 при помощи шарниров 5 пластин в виде осей связаны своими концами рычаги 6, которые при помощи шарнира 7 рычагов также связаны друг с другом вторыми своими концами. С шарниром 7 рычагов посредством жесткой связи 8 соединен груз 9 с возможностью его перемещения в направлении вертикальной оси 001 при тепловой деформации термобиметаллической пластины. С целью повышения нагрузочной способности и обеспечения возможности перемещения груза с большей массой может применяться несколько установленных параллельно термобиметаллических пластин 4, концы которых связаны друг с другом при помощи шарниров 5. Приведенное устройство термобиметаллического привода обеспечивает прямолинейное перемещение груза 9. Каждый термобиметаллический привод в составе пластин 4, рычагов 6, шарниров 5, 7 и жесткой связи 8 помещен в свою камеру 10, также прикрепленную к замкнутой гибкой связи 3. Противоположные стороны камеры, обращенные вдоль замкнутой гибкой связи, выполнены в виде клапанов, представляющих собой створки 11, равновесно установленные с возможностью свободного кругового поворота на своих осях 12, связанных со стенками камер 10. К оси 12 створки перпендикулярно ее плоскости прикреплен одноплечий рычаг 13 с закрепленным на его конце противовесом 14. С обеих сторон оси 12 к окраинам створки 11 прикреплены дополнительные поперечные створки 15 клапана, которые при цилиндрической форме камеры выполнены в виде части сферы, образованной вращением окружности вокруг диаметра, совмещенного с осью 12 створки. В нижней части ротора расположено направляющее колесо 16, нижнюю половину обода которого охватывает та же замкнутая гибкая связь 3, которая охватывает верхнюю половину обода верхнего колеса 2 ротора. Оси верхнего 0 и нижнего 01 колес 2 и 16 параллельны и расположены на одной вертикали 001, что достигается применением оттяжек 17, связывающих ось 01 нижнего колеса 16 с понтоном 18, который удерживает на плаву в погруженном состоянии весь ротор 1, служит для него основанием и соединен с верхним колесом 2 ротора при помощи жестких связей 19, содержащих подшипники или втулки, несущие вал 1 ротора. Подвеска нижнего колеса 16 к понтону 18 осуществляется также при помощи несущей связи 20.
Теплогравитационная силовая установка работает следующим образом.
При неподвижном роторе 2 в исходном положении также неподвижна охватывающая ротор замкнутая гибкая связь 3 с прикрепленными к ней термобиметаллическими приводами 4 и камерами 10. Под действием сил тяжести, воздействующих на противовесы 14, они обеспечивают постоянное вертикальное положение рычагов 13 и постоянное горизонтальное положение створок 11 клапанов. В связи с этим у камер 10, расположенных в данный момент горизонтально в верхней и нижней частях ротора, створки 11 клапанов открыты, т.е. расположены горизонтально и не препятствуют протоку жидкости через полости этих камер. У камер, находящихся в данный момент в вертикальном положении в промежутке между верхним 2 и нижним 16 колесами ротора, створки закрыты, т.е. перекрывают вход и выход в полость камеры. У камер, находящихся в наклонном положении в пределах колес 2 и 16, т.е. при переходе их из горизонтального положения в вертикальное и наоборот, полости камер перекрыты поперечными дополнительными створками 15 клапанов. Следовательно, полости камер 10 открыты и проточны для окружающей жидкости только при нахождении их в крайнем верхнем и в крайнем нижнем положении на колесах ротора 2 и 16. Это обеспечивает заполнение камер жидкостью с более высокой температурой Т2 при нахождении в верхнем положении и с меньшей температурой Т1 нагрева при нахождении в нижнем положении. В промежутке между этими положениями закрытые створки 11 клапанов изолируют полости камер от окружающей жидкости и сохраняют ту ее температуру Т1 или Т2, которую она имела при заполнении полостей камер соответственно в нижнем или верхнем положении.
В связи с разной температурой нагрева при нахождении в различном положении термобиметаллические пластины 4 изгибаются в большей или меньшей степени или в зависимости от предусмотренного конструкцией режима работы совершают изгибы в противоположные стороны. На фиг.2 изменение положения пластин 4 при их тепловом изгибе показано штрихпунктирной линией. Перемещение концов пластин при их изгибах передается рычагами 6 и жесткой связью 8 на груз 9, который совершает соответствующие перемещения, приближаясь к замкнутой гибкой связи 3 на расстояние R1 или удаляясь от нее на R2. Амплитуда этих перемещений груза обозначена величиной h. Ось 0 верхнего колеса 2 ротора и ось 01 нижнего колеса 16 ротора находятся на одной вертикали 001. Благодаря этому каждый из грузов 9 передает на ротор вращающий момент в зависимости от его расстояния от вертикальной оси 0-01. На фиг.1 приведена силовая установка, у которой более высокая температура Т2 жидкости обуславливает перемещение грузов на большее расстояние от вертикали 001. При одинаковой у всех грузов массе, а соответственно и воздействующей на каждый из грузов равной силе тяжести Р каждый из грузов 9 в зависимости от его положения: справа или слева от вертикали 001 передает на ротор вращающий момент, направление которого зависит от положения груза, а величина вращающего момента равна PR1 или PR2 при большем значении второго из этих моментов.
Суммарные величины вращающих моментов PR2 и PR1 всех грузов направлены в противоположные стороны, поэтому ротор вращается в сторону действия большей суммы вращающих моментов PR2 соответствующих грузов. На фиг.1 вращение ротора направлено против часовой стрелки.
Использование: в энергетике. Сущность изобретения: силовая установка работает за счет тепловой деформации биметаллических элементов, обеспечивающих перемещение грузов при прохождении зоны нагрева и охлаждения. Силы тяжести, воздействующие на грузы, при разном плече создают вращающие моменты, направленные в противоположные стороны по разную сторону от вертикали, в результате чего ротор приводится во вращение в направлении действия большего по величине вращающего момента. 5 з.п. ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4121420, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
