Изобретение относится к измерительной технике и может быть использовано для контроля линейных перемещений и вибраций различных механических узлов и оборудования, например, на атомных электростанциях, а также на объектах с вредными условиями труда.
Известен взятый в качестве прототипа датчик линейного перемещения, который содержит корпус, внутри которого на каркасе размещены две дифференциально соединенные обмотки, которые подключены по схеме индуктивного полумоста к генератору несущей частоты и дополнены в нем парой одинаковых сопротивлений до полного моста; установленный с возможностью перемещения относительно них ферромагнитный сердечник, подпружиненный относительно корпуса выдвижной шток, размещенный соосно с ним контактный наконечник, электромагнитный калибратор, выполненный в виде ферромагнитного якоря и закрепленной на штоке катушки, размещенный внутри штока реверсивный подшипник, согласно изобретению ферромагнитный сердечник датчика закреплен на штоке, а контактный наконечник соединен с якорем, установлен в реверсивном подшипнике и выполнен с грибкообразной головкой, взаимодействующей со свободным торцом штока своей плоской частью; калибровка датчика осуществляется за счет калибратора, а надетый на шток ферромагнитный сердечник перемещается относительно измерительных обмоток и вызывает разбаланс моста, который измеряется и соответствует определенному перемещению объекта (патент РФ №2037769, опубл. 19.06.95 г., бюл. №17). Процесс регистрации перемещений объекта таким датчиком проводится только после того, как корпус датчика установят около объекта, выдвижной шток прижимают к объекту таким образом, чтобы риска на штоке, определяющая величину перемещения, была совмещена с краем корпуса датчика, сигнал с измерительной обмотки равнялся нулю, а корпус датчика жестко фиксируют специальным крепежом.
Недостатками данного датчика являются:
1. Сложная конструкция датчика.
2. Снижение точности работы датчика вследствие необходимости ручной регулировки при рассогласовании ферромагнитного сердечника и измерительных обмоток.
3. Снижение надежности работы устройства вследствие того, что калибровка датчика осуществляется только на фиксированное расстояние и только в одном направлении перемещения штока.
4. Снижение точности и объективности работы датчика вследствие отсутствия простейших элементов автоматизации процесса регистрации и обработки полученной информации.
Предлагаемым изобретением решается задача повышения безопасности, точности, надежности и объективности работы датчика.
Для получения такого технического результата предлагается датчик линейных перемещений, содержащий корпус, размещенные в нем две дифференциально соединенные обмотки, установленный с возможностью перемещения относительно них ферромагнитный сердечник, закрепленный на выдвижном штоке, который подпружинен относительно корпуса, и размещенный соосно с ним контактный наконечник полусферической формы.
Отличительным признаком предлагаемого датчика является то, что дополнительно в корпус датчика включен шаговый электродвигатель, немагнитная втулка, на которой закреплены две дифференциально-соединенные обмотки и к свободному концу которой приварена гайка, в которую вворачивается винт, соединенный муфтой с валом шагового электродвигателя, и внутренний стержень, который закреплен в корпусе штока и на котором установлен ферромагнитный сердечник.
Кроме того, к отличительным признакам предлагаемого датчика относится то, что он дополнительно содержит двухканальный усилитель для сигналов датчика перемещения и термопары; многофункциональный контроллер, центральный процессор и аналого-цифровые преобразователи которого, осуществляют измерение сигналов датчиков, индикацию режимов работы и результатов измерений на жидкокристаллическом индикаторе, а также обеспечивают работу блока управления шаговым электродвигателем (БУШД-1), блока накопления электрических параметров (НЭП-256) и организуют интерфейс для передачи данных измерений в ПК.
Предлагаемый датчик отличается также тем, что контактный наконечник имеет форму полусферы и внутреннюю полость, в которую вварена термопара. Немагнитная втулка предлагаемого устройства соединена с корпусом датчика шпоночным соединением.
В результате практического применения предлагаемого устройства датчика повышается безопасность, точность, надежность и объективность работы датчика вследствие того, что калибровку и настройку датчика можно проводить дистанционно при любом положении штока с контактным наконечником относительно закрепленного корпуса датчика. При этом две дифференциально-соединенные обмотки датчика могут перемещаться с любой установленной скоростью в обоих направлениях по отношению к выдвижному штоку с ферромагнитным сердечником. Перемещающаяся втулка, а вместе с нею две дифференциально-соединенные обмотки датчика при любом положении выдвижного штока всегда позволяют устанавливать выходной сигнал, равный нулю, а использование блока управления шаговым электродвигателем датчика обеспечивает быструю и надежную настройку датчика в режим контроля перемещений и вибраций контролируемого объекта. Дополнительное применение термопары, расположенной в контактном наконечнике, позволяет регистрировать изменения перемещений объекта при его нагревании в процессе эксплуатации.
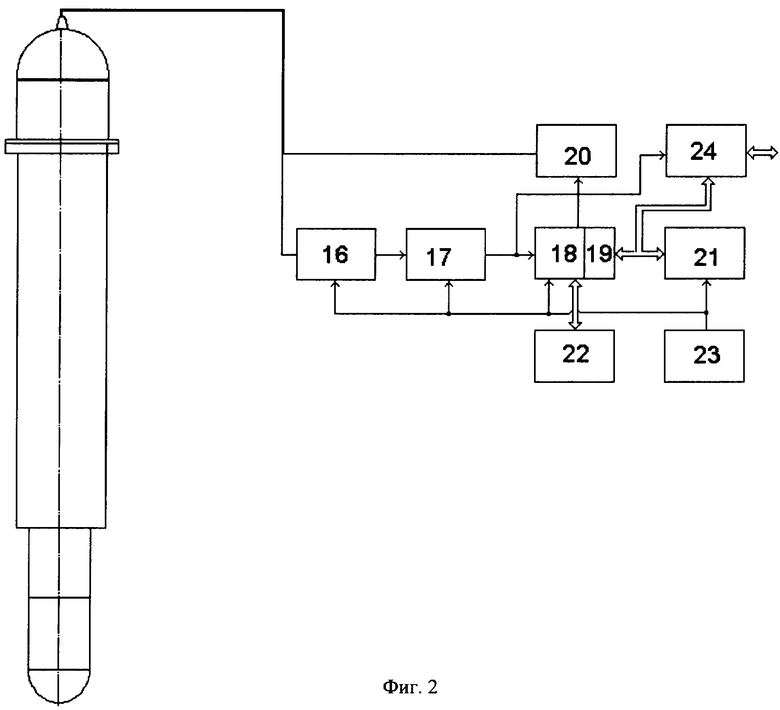
Предлагаемое изобретение иллюстрируется чертежами, на которых изображены: на фиг.1 - общий вид датчика линейных перемещений с примерами работы; на фиг.2 - структурная схема датчика; на фиг.3 - выбор рабочих программ датчика на видеоэкране устройства, поясняющих основные принципы работы.
Датчик (1) содержит (см. фиг.1) корпус выдвижного штока (2), внутренний стержень (3), ферромагнитный сердечник (4), пружину (5), термопару (6), втулку (7), две дифференциально-соединенные обмотки (8), гайку (9), винт (10), шаговый электродвигатель (11), концевые выключатели (12), муфту (13), втулку (14) из полистирола, шпонку (25), контактный наконечник (26) и гайку (27). Корпус выдвижного штока (2) имеет цилиндрический вид. С одной стороны штока приварена стенка с отверстием по центру для установки стержня (3) с запрессованной на нем втулкой (14) из полистирола, имеющей диаметр, равный внутреннему диаметру штока, и резьбовое соединение для контактного наконечника (6). А на противоположном конце штока имеется бурт для удержания пружины (5). Контактный наконечник (26) имеет полусферическую форму и соединяется с корпусом выдвижного штока (2) резьбовым соединением. К внутренней поверхности контактного наконечника (26) приварена термопара (6). На правый конец стержня (3) посредством резьбового соединения устанавливается ферромагнитный сердечник (4). Стержень (3) с втулкой (14) из полистирола и ферромагнитным сердечником (4) закрепляется гайкой (27) в корпусе штока (2). Втулка (14) из полистирола используется для улучшения центровки и увеличения жесткости этой сборки выдвижного штока (2). К свободному концу втулки (7) приварена гайка (9), а на другом конце втулки размещаются две дифференциально-соединенные обмотки (8). В гайку (9) ввернут винт (10), который через металлическую муфту (13) соединен с валом шагового электродвигателя (11). Электродвигатель (11) закреплен в хвостовой части корпуса датчика (1). Стержень (3), ферромагнитный сердечник (4), втулка (7), гайка (9) изготавливаются из немагнитного материала. Резьбовое соединение гайки (9) с винтом (10) образует винтовую пару, которая при включении электродвигателя (11) может перемещать втулку (7) с двумя дифференциально-соединенными обмотками (8) в обоих направлениях относительно любого положения выдвижного штока (2) с ферромагнитным сердечником (4), даже при полном втягивании выдвижного штока в корпус датчика (1). Поэтому длина стального винта (10), на который наворачивается либо сворачивается гайка (9), а вместе с нею перемещается втулка (7) с двумя дифференциально-соединенными обмотками (8), больше длины рабочего хода выдвижного штока (2) на 3 мм - 5 мм. Поступательное движение втулки (7) обеспечивается шпоночным соединением, для этого во втулке делается продольный паз, в который входит шпонка (25), которая в свою очередь вворачивается по резьбе в корпус датчика (1). Для того чтобы в процессе работы при больших перемещениях гайка (9) не сошла с винта (10) по краям резьбовой части винта в корпусе датчика (1) установлены концевые микровыключатели (12), которые в крайних положениях гайки (9) обрывают цепь питания шагового электродвигателя (11).
Таким образом, конструкция выдвижного штока (2) с одной стороны и втулка (7) с двумя дифференциально-соединенными обмотками (8) - шаговый электродвигатель (11) с другой стороны представляют собой две независимые, но совмещаемые конструкции в корпусе датчика (1). В данной конструкции при вращении вала электродвигателя (11) против часовой стрелки втулка (7) с двумя дифференциально-соединенными обмотками (8) перемещается к электродвигателю (11). В случае вращения вала электродвигателя в направлении по часовой стрелке, винтовая пара (9, 10) перемещает внутреннюю втулку (7) с двумя дифференциально-соединенными обмотками (8) в противоположную сторону от электродвигателя, т.е. к торцевому краю корпуса датчика (1). Пружина (5) соединена со штоком (2) и работает на сжатие, прижимая контактный наконечник (6) к контролируемому объекту (28). При освобождении штока (2) пружина (5) всегда возвращает его в крайнее левое положение.
Так, например, на фиг.1а показан датчик линейных перемещений в свободном состоянии, когда пружина (5) работает на сжатие и выталкивает шток (2) на полную его длину. Втулка (7) установлена так, что ферромагнитный сердечник (4) перекрывает половину дифференциально-соединенной обмотки (8), что при включенном датчике дает на выходе обмотки максимальный уровень сигнала положительной фазы. На фиг.1б показан датчик, когда его шток прижат к контролируемому объекту до совмещения риски (15) на выдвижном штоке (2) с торцом корпуса датчика (1). В этом положении шток (2) своим крайним буртом растягивает пружину (5). При этом ферромагнитный сердечник (4) штока располагается напротив установленной втулки (7) с двумя дифференциально-соединенными обмотками (8) и выравнивает индуктивные сопротивления ее обеих половин, что при включенном датчике даст выходной сигнал, равный нулю. Такое положение датчика является стартовым, с которого начинают регистрировать линейные перемещения объекта. На фиг.1с выдвижной шток прижат к поверхности контролируемого объекта полностью, а втулка (7) установлена таким образом, что две дифференциально-соединенные обмотки (8) расположены другой своей половиной по отношению к ферромагнитному сердечнику (4). Тогда при включенном датчике выходной сигнал с дифференциальной обмотки будет иметь максимальное значение, но уже отрицательной фазы по отношению к сигналу фиг.1а. В действительности, обмотку (8) можно совместить с ферромагнитным сердечником (4) выдвижного штока (2) при любом его положении.
Датчик содержит также (фиг.2) генератор (16) для запитки двух дифференциально-соединенных обмоток (8) сигналом синусоидального вида, двухканальный усилитель (17), многофункциональный контроллер (18), последовательный интерфейс USB-2 (19) для связи с внешним ПК, блок управления шаговым электродвигателем (БУШД-1) (20), жидкокристаллический индикатор (21), управляющую клавиатуру (22), блок накопления электрических параметров (НЭП-256) (24) и блок питания (23).
Центральный процессор контроллера (18) управляет работой встроенного двухканального аналога цифрового преобразователя (АЦП), обеспечивая регистрацию сигналов с датчика, выводит информацию на ЖК-индикатор, управляет работой клавиатуры.
Функциональный блок управления шаговым электродвигателем БУШД-1 (20), работающий под управлением центрального процессора контроллера устройства (18), формирует сигнал широтно-импульсной модуляции (ШИМ) для управления работой шагового электродвигателя датчика линейных перемещений.
Функциональный блок накопления электрических параметров НЭП-256 (24) подключается параллельно контроллеру по входным сигналам датчика. Блок имеет собственные входные усилители, аналого-цифровые преобразователи, цифровую память, интерфейс USB-2, таймер реального времени и аккумуляторную батарею, которая позволяет сохранять зарегистрированные электрические параметры в памяти блока на протяжении длительного времени. Блок НЭП-256 является неотъемлемой частью при регистрации электрических параметров контролируемого объекта в ключевых режимах, а именно при пусках, остановах и переходных режимах, как наиболее ценные и существенные с информационной точки зрения. Блок НЭП-256 имеет два разъема, входной для подключения к магистрали устройства контроля либо снятия и интерфейсный разъем USB-2 для подключения к внешнему персональному компьютеру (ПК).
Предлагаемый датчик может работать как автономно по прошитой в контроллере устройства программе, так и по специально разработанной программе WORK. EXE под управлением ПК, состоящей из двух подпрограмм: Kalibre. ехе и Registre. ехе. Программа Kalibre. ехе предназначена для установления калибровочной шкалы - зависимости выходного сигнала датчика от величины перемещения и для сигнала термопары от изменения температуры контролируемого объекта. Программа Registre ехе предназначена для процедуры непосредственной регистрации величины линейного перемещения, вибраций и температуры контролируемого объекта. Эта программа удобна тем, что она не только выводит показания сигнала с датчика на ЖК-индикатор, но и позволяет функциональными кнопками (ON,  ,
,  ,
,  ,
,  , OFF) управлять работой шагового электродвигателя (11) посредством винтовой пары (9, 10) и устанавливать две дифференциально-соединенные обмотки (8) в необходимое для регистрации АЦП контроллера положение.
, OFF) управлять работой шагового электродвигателя (11) посредством винтовой пары (9, 10) и устанавливать две дифференциально-соединенные обмотки (8) в необходимое для регистрации АЦП контроллера положение.
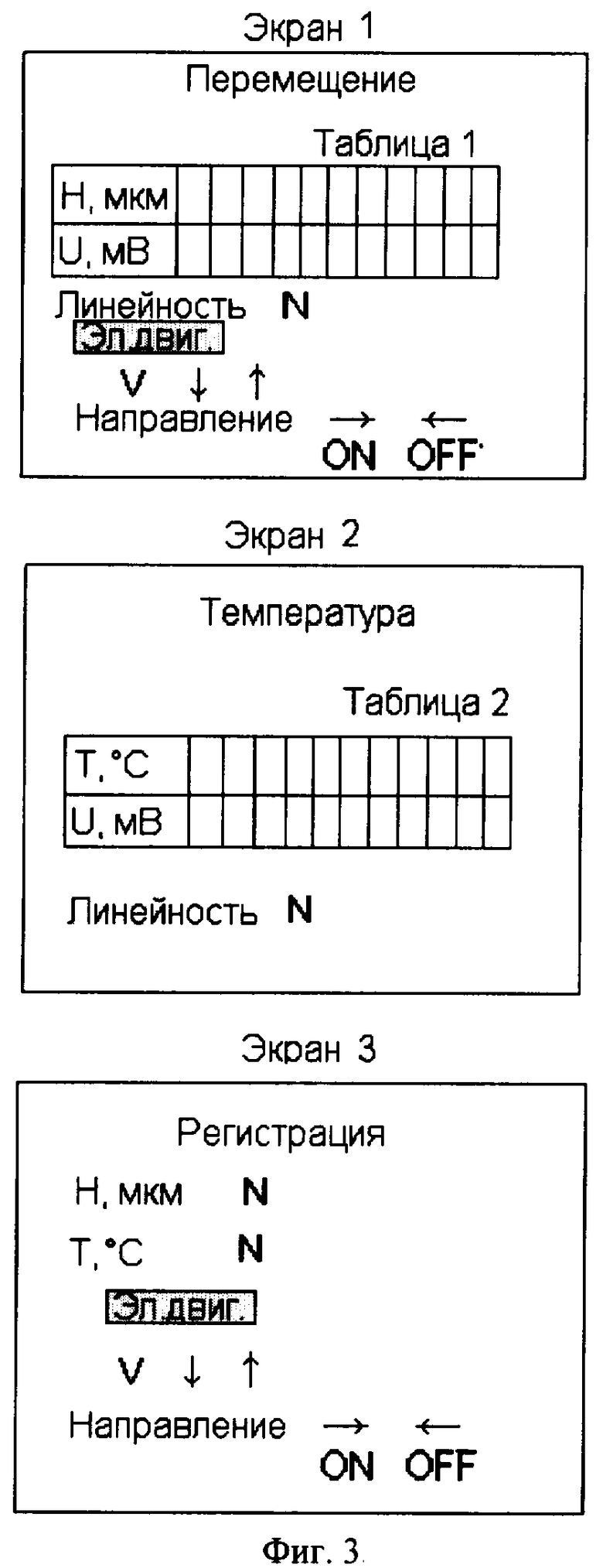
Работа датчика линейных перемещений осуществляется в следующей последовательности. Перед включением контролируемого объекта в работу корпус датчика (1) закрепляют на кронштейне либо на штативе около контролируемого объекта (28) таким образом, чтобы контактный наконечник (26) со встроенной термопарой (6) упирался в контролируемый объект (28), а риска (15) на выдвижном штоке (2) была совмещена как можно точнее с передним краем корпуса датчика (1), см. фиг.1б. После этого включают устройство контроля. На цифровом индикаторе включенного устройства контроля запускается программа Registre. ехе (см. фиг.3, экран 3). По показаниям величины сигнала от двух дифференциально-соединенных обмоток на ЖК-индикаторе видно, насколько далеко и в каком месте находится она по отношению к ферромагнитному сердечнику (4) выдвижного штока (2). На пульте управления кнопками (ON,  ,
,  ,
,  ,
,  , OFF) устанавливаются направление, скорость перемещения втулки (7) с двумя дифференциально-соединенными обмотками (8) и включается шаговый электродвигатель (11). При этом вал электродвигателя (11) через соединительную муфту (13) передает вращение винтовой паре (9, 10) и с малой скоростью перемещает втулку (7) с двумя дифференциально-соединенными обмотками (8), в сторону уменьшения сигнала до индикации нулевого сигнала с датчика перемещений, что соответствует «нулевому положению». После чего движение втулки (7) приостанавливают нажатием клавиши OFF. Затем включают контролируемый объект в работу. После этого нажимают клавишу ON и выходят на режим постоянной регистрации линейных перемещений, вибраций и температурных перемещений объекта. Программа осуществляет запись данных по перемещению объекта и его температуру в блок памяти накопителя электрических параметров (НЭП-256) (24), а также, если требуется, организует постоянную передачу данных по последовательному интерфейсу USB-2 в персональный компьютер. Записанные в память контроллера данные используются в аналитических программах для контроля за положением и температурой объекта. При любом положении выдвижного штока по программам Registre. ехе всегда возможно осуществить коррекцию положения датчика.
, OFF) устанавливаются направление, скорость перемещения втулки (7) с двумя дифференциально-соединенными обмотками (8) и включается шаговый электродвигатель (11). При этом вал электродвигателя (11) через соединительную муфту (13) передает вращение винтовой паре (9, 10) и с малой скоростью перемещает втулку (7) с двумя дифференциально-соединенными обмотками (8), в сторону уменьшения сигнала до индикации нулевого сигнала с датчика перемещений, что соответствует «нулевому положению». После чего движение втулки (7) приостанавливают нажатием клавиши OFF. Затем включают контролируемый объект в работу. После этого нажимают клавишу ON и выходят на режим постоянной регистрации линейных перемещений, вибраций и температурных перемещений объекта. Программа осуществляет запись данных по перемещению объекта и его температуру в блок памяти накопителя электрических параметров (НЭП-256) (24), а также, если требуется, организует постоянную передачу данных по последовательному интерфейсу USB-2 в персональный компьютер. Записанные в память контроллера данные используются в аналитических программах для контроля за положением и температурой объекта. При любом положении выдвижного штока по программам Registre. ехе всегда возможно осуществить коррекцию положения датчика.
Калибровка датчика линейных перемещений, как было сказано выше, предусматривает получение линейной зависимости величины сигнала датчика от перемещения выдвижного штока. Калибровку датчика можно проводить как на лабораторном столе (датчик лежит на столе), так и на закрепленном датчике около объекта контроля. Для калибровки на экране ЖК-индикатора, включенного датчика, из основного меню маркером выбирается на выполнение программа Kalibre. ехе, после чего экран обновляется и появляется новый экран с программой Kalibre. ехе для калибровки перемещения и температуры. Маркером выбирают программу «Перемещение», после чего экран обновляется вновь и появляется новый (фиг.3, экран 1) с программой «Перемещение» и элементами управления шаговым электродвигателем. Кнопками управления (ON,  ,
,  ,
,  ,
,  , ON, OFF) этого экрана устанавливают скорость и направление перемещения втулки (7) с двумя дифференциально-соединенными обмотками (8), включают шаговый электродвигатель (11), который перемещает втулку (7) в направлении ближайшего концевого выключателя (12) до останова. Затем изменяют направление и уменьшив скорость движения втулки (7) включают шаговый электродвигатель, который перемещает втулку (7) с двумя дифференциально-соединенными обмотками (8), над ферромагнитным сердечником (4) штока (2) до останова на противоположном концевом выключателе (12). За время такого прохождения втулки (7) АЦП устройства оцифровывает и записывает в памяти контроллера (18) полностью весь сигнал с двух дифференциально-соединенных обмоток (8). После чего, нажав кнопку Esc, программа не только находит и запоминает нулевое значение сигнала для положения штока, но и заполняет таблицу из значений сигнала по всей длине ферромагнитного сердечника с вычислением относительной погрешности линейности сигнала перемещения.
, ON, OFF) этого экрана устанавливают скорость и направление перемещения втулки (7) с двумя дифференциально-соединенными обмотками (8), включают шаговый электродвигатель (11), который перемещает втулку (7) в направлении ближайшего концевого выключателя (12) до останова. Затем изменяют направление и уменьшив скорость движения втулки (7) включают шаговый электродвигатель, который перемещает втулку (7) с двумя дифференциально-соединенными обмотками (8), над ферромагнитным сердечником (4) штока (2) до останова на противоположном концевом выключателе (12). За время такого прохождения втулки (7) АЦП устройства оцифровывает и записывает в памяти контроллера (18) полностью весь сигнал с двух дифференциально-соединенных обмоток (8). После чего, нажав кнопку Esc, программа не только находит и запоминает нулевое значение сигнала для положения штока, но и заполняет таблицу из значений сигнала по всей длине ферромагнитного сердечника с вычислением относительной погрешности линейности сигнала перемещения.
Для калибровки термопары по температуре в программе Kalibre ехе выбирается процедура калибровки термопары «Температура» (фиг.3, экран 2).
Калибровка термопары осуществляется следующим образом: датчик линейного перемещения закрепляют над сосудом с водой таким образом, чтобы контактный наконечник (26) был погружен в воду. Вода в сосуде нагревается нагревателем и контролируется термометром со шкалой -10°С…+100°С. Запускается на выполнение программа калибровки «Температура». При нажатии на кнопку Ent на жидкокристаллическом экране (21) устройства регистрации высвечивается таблица зависимости величины сигнала от температуры.
Пример
Таблица 1 (сигнал датчика - линейное перемещение)
В первой колонке таблицы 1 буквой Н обозначается линейное перемещение в микронах, а во второй колонке буквой U обозначается величина выходного сигнала с датчика в милливольтах (мВ), соответствующая перемещениям. Калибровочная характеристика датчика линейных перемещений хранится в памяти контроллера (18) устройства.
Для регистрации линейных перемещений до 1000 мкм скорость движения втулки с измерительной обмоткой устанавливается в 0,2 об/с.
Таблица 2 (сигнал датчик-температура)
В верхнюю строчку таблицы заносят температуру до 100°C, а в нижнюю строчку - показания АЦП в мВ при достижении термопарой соответствующей температуры, например:
При достижении термопарой температур при нагревании 20°С, 30°С, 40°С…100°С клавишей Esc последовательно фиксируют соответствующие значения сигнала термопары, которые автоматически вставляются в таблицу 2. При выходе из процедуры калибровки температуры данные, записанные в таблице 2, запоминаются в памяти контроллера и формируются в калибровочную характеристику датчика температуры (6) (термопары), а также вычисляется линейность этой характеристики. Для измеряемых температур более 100°C в качестве нагревателей могут быть использованы нагревательная печь, муфельная печь и подобные нагреватели. В этом случае в качестве контроля температуры может быть использован тепловизор модели Land Guide М3 (М4). На этом калибровка датчика заканчивается. Следует отметить, что измерительные каналы датчиков не содержат какой-либо ручной настройки, а сама калибровка датчиков проводится единожды по той основной причине, что измерительные каналы имеют высокие технические и температурные характеристики, однако при необходимости калибровку любого из датчиков можно повторить.
Предлагаемый датчик предназначен для работы в многосуточном режиме в помещениях с повышенным фоном радиационного излучения, химической активности и повышенной температуры на больших расстояниях до контролируемого объекта (до 200 метров).
Предлагаемый датчик не критичен к положению и месту крепления корпуса датчика по отношению к контролируемому объекту как в процессе калибровки, так и при измерениях, поскольку перемещающаяся втулка с двумя дифференциально соединенными обмотками датчика при любом положении выдвижного штока всегда позволяет устанавливать выходной сигнал, равный нулю.
Предлагаемый датчик прошел лабораторные испытания, показав высокую точность работы в режимах калибровки и регистрации линейных перемещений, а также контроля температуры объекта.
В настоящее время проведены успешные лабораторные испытания датчика на образцах при определении перемещений от нескольких мкм до 1000 мкм, а сам датчик готовится для испытаний на парогенераторе третьего блока Ново-Воронежской АЭС.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И ВИБРАЦИЙ | 2011 |
|
RU2456541C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И ВИБРАЦИЙ | 2016 |
|
RU2618625C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2037769C1 |
| Датчик линейных перемещений | 1986 |
|
SU1366867A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВЗАИМОИНДУКТИВНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2011 |
|
RU2464528C1 |
| Устройство управления давлением сжатого воздуха с приводом от линейного актуатора | 2021 |
|
RU2767568C1 |
| Датчик линейных перемещений | 1982 |
|
SU1033849A1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| Измерительная головка | 1990 |
|
SU1780929A1 |
| Способ определения коэффициента трения смазочных материалов | 2022 |
|
RU2800944C1 |
Изобретение относится к измерительной технике и может быть использовано для контроля линейных перемещений и вибраций различных механических узлов и оборудования на объектах с вредными условиями труда, например на атомных электростанциях. Сущность: датчик состоит из двух независимых и перемещающихся узлов. Первый узел содержит выдвижной шток, подпружиненный относительно корпуса датчика, и размещенные соосно с ним контактный наконечник полусферической формы и ферромагнитный сердечник. Ферромагнитный сердечник ввернут во внутренний стержень, который закреплен в корпусе штока. Во внутреннюю полость контактного наконечника вварена термопара. Второй узел состоит из немагнитной втулки, на которой расположены дифференциально соединенные измерительные обмотки, к свободному концу которой приварена гайка. В гайку вворачивается винт, соединенный муфтой с валом шагового электродвигателя. Технический результат: повышение безопасности за счет возможности дистанционной калибровки и настройки, повышение точности, надежности. 2 з.п. ф-лы, 3 ил.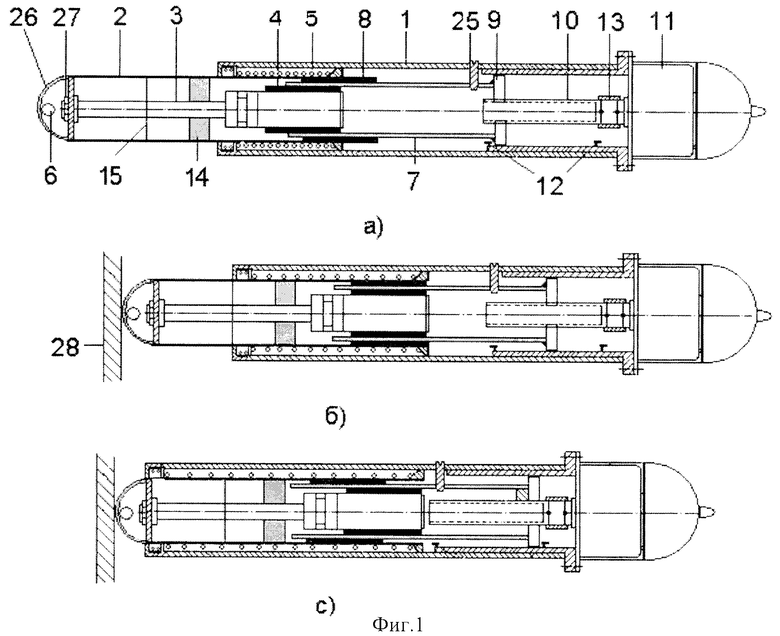
1. Датчик линейных перемещений, содержащий корпус, размещенные в нем две дифференциально соединенные обмотки, установленный с возможностью перемещения относительно них ферромагнитный сердечник, подпружиненный относительно корпуса выдвижной шток, размещенный соосно с ним контактный наконечник, отличающийся тем, что дополнительно в корпус датчика включены шаговый электродвигатель, немагнитная втулка, соединенная с корпусом датчика шпоночным соединением, на которой закреплены дифференциально соединенные обмотки, и к свободному концу которой приварена гайка, в которую вворачивается винт, соединенный муфтой с валом шагового электродвигателя, и внутренний стержень, который закреплен в корпусе штока и на котором установлен ферромагнитный сердечник.
2. Датчик по п.1, отличающийся тем, что он дополнительно содержит двухканальный усилитель для сигналов датчика перемещения и термопары, многофункциональный контроллер, центральный процессор и аналого-цифровые преобразователи которого осуществляют измерение сигналов датчиков, индикацию режимов работы и результатов измерений на ЖК-индикаторе и управление работой блока шагового электродвигателя, блок накопления электрических параметров (НЭП) и интерфейс для передачи данных измерений в ПК.
3. Датчик по п.1 или 2, отличающийся тем, что контактный наконечник имеет форму полусферы и внутреннюю полость, в которую вварена термопара.
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2037769C1 |
| Устройство для наклеивания этикеток на цилиндрические предметы | 1937 |
|
SU54424A1 |
| СПОСОБ ФИКСАЦИИ ПРЯМОЙ КИШКИ | 2003 |
|
RU2235512C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

