Изобретение относится к измерительной технике и может быть использовано для контроля линейных перемещений и вибраций различных узлов и оборудования, например, на атомных электростанциях, а также на объектах с вредными условиями труда.
Вибрация - это упругое механическое колебание с частотой более 1 Гц и малой амплитудой. Вредная вибрация возникает при рабочем движении, работе двигателей, насосов и других машин и иногда приводит к нарушению режима работы и даже разрушению устройств. Когда нет средств подавления вибраций, то используют технические средства постоянного контроля для возможного минимизирования последствий.
Из уровня техники известен взятый в качестве прототипа датчик линейных перемещений, содержащий корпус, размещенные в нем шаговый электродвигатель, подпружиненный относительно корпуса выдвижной шток, размещенный соосно с ним контактный наконечник, немагнитную втулку, на которой закреплена измерительная обмотка, и внутренний стержень, который закреплен в корпусе штока (патент РФ 2375674 С2, МПК G01B 7/00; опубл. 10.12.2009).
Недостатками прототипа являются сложная конструкция датчика и невозможность регистрации вибраций контролируемого объекта.
В ЗАО «НТЦ «ДИАПРОМ» разработана более простая конструкция датчика с возможностью регистрации помимо линейных перемещений, также и вибраций объекта. Техническим результатом данного изобретения является повышение точности, надежности, безопасности и оперативности работы одним датчиком, как в режиме регистрации линейного перемещения, так и в режиме регистрации вибраций контролируемого объекта.
Сущность изобретения заключается в датчике линейных перемещений, содержащем корпус, размещенные в нем линейный шаговый электродвигатель, подпружиненный относительно корпуса выдвижной шток с риской, размещенный соосно с ним контактный наконечник, немагнитную втулку, соединенную с корпусом датчика шпоночным соединением, на которой закреплена измерительная обмотка и к свободному концу которой присоединена гайка, образующая винтовую пару со стальным валом линейного шагового электродвигателя, и внутренний стержень, закрепленный в корпусе выдвижного штока гайкой. Одновременно с этим соосно с контактным наконечником размещен ферромагнитный наконечник с возможностью перемещения относительно немагнитной втулки. Измерительная обмотка датчика имеет при этом длину намотки 10 мм и толщину провода не более 0,1 мм для регистрации 30 мм линейных перемещений и 600 мкм вибраций. Линейные перемещения при этом определяются по числу шагов регулирования линейного шагового электродвигателя.
Линейный шаговый электродвигатель может быть типа AM2224-R3, иметь диаметр двигателя в 22 мм, собственный вал диаметром 3 мм и длину вала в 30,7 мм с коническим видом резьбы. Толщина провода обмотки может быть от 0,06 мм, но не более 0,1 мм, в три-четыре слоя. Такие конструктивные изменения в датчике позволили уменьшить его общую длину и его внешний диаметр и создать датчик нового типа, позволяющий совмещать регистрацию 30 мм линейных перемещений и 600 мкм вибраций контролируемого объекта и обладающий при этом чувствительностью не хуже 2 мкм на частотах до 40 Гц.
К достоинствам предлагаемого датчика относится то, что из конструкции датчика удалена термопара и концевые выключатели, что упрощает схему регистрации сигнала датчика и управления линейным шаговым электродвигателем. Также в схеме регистрации сигнала датчика оставлен лишь один инструментальный усилитель с коэффициентом усиления 500 для регистрации сигнала вибраций. Помимо этого, в результате изменения конструкции измерительной обмотки, процедура калибровки датчика для последующей регистрации линейных перемещений с применением специального набора мер толщин отпадает.
Также безопасность, точность, надежность и оперативность работы датчика повышены и вследствие того, что калибровку и настройку датчика могут проводить дистанционно при любом положении штока с контактным наконечником относительно закрепленного корпуса датчика. Измерительная обмотка датчика может быть перемещена с любой установленной скоростью в обоих направлениях по отношению к выдвижному штоку с ферромагнитным наконечником. Ферромагнитный наконечник выдвижного штока при любом положении совмещается с измерительной обмоткой посредством включения линейного шагового электродвигателя таким образом, чтобы сигнал с датчика был равен нулю. Данное состояние датчика говорит о его готовности к работе в любом заданном режиме, как для измерений линейных перемещений, так и вибраций контролируемого объекта. Как следствие, положение ферромагнитного наконечника вместе с совмещенной измерительной обмоткой при нулевом сигнале может быть произвольным, интерес в данном случае представляет величина смещения обмотки относительно принятой нулевой отметки, т.е. нулевого сигнала. Также именно использование коммутатора управления (для линейного шагового электродвигателя) датчика обеспечивает быструю и надежную настройку датчика в режим контроля перемещений и вибраций контролируемого объекта.
Датчик содержит (фиг.1) корпус (1), выдвижной шток (2) с нанесенной на него риской (15), внутренний стержень (3), ферромагнитный наконечник (4), возвратную пружину (5), немагнитную втулку (6) с измерительной обмоткой (7), гайку (8), стальной вал (9) линейного шагового электродвигателя (10), шпонку (11), гайку (12), контактный наконечник (13) и втулку (14) из немагнитного материала (например, полистирола). Выдвижной шток (2) имеет цилиндрический вид, с одной стороны у него приварена стенка с отверстием по центру для установки внутреннего стержня (3) с запрессованной на ней втулкой из полистирола (14), имеющей диаметр, равный внутреннему диаметру штока, а на противоположном конце выдвижного штока имеется бурт для удержания возвратной пружины (5). Внутренний стержень (3) с втулкой из полистирола (14) и ферромагнитным наконечником (4) закрепляется гайкой (12) в корпусе выдвижного штока (2). Втулка из полистирола (14) используется для улучшения центрирования и увеличения жесткости этой сборки выдвижного штока (2). К свободному концу немагнитной втулки (6) присоединена гайка (8), а на другом конце втулки размещается измерительная обмотка (7). В гайку (8) ввернут стальной вал линейного шагового электродвигателя (10). Линейный шаговый электродвигатель (10) закреплен в хвостовой части корпуса (1). Внутренний стержень (3), втулка (6), гайка (8) изготавливаются из немагнитного материала. Ферромагнитный наконечник (4) изготавливается путем нанесения на его поверхность ферромагнитной пасты. Контактный наконечник (13) имеет полусферическую поверхность и соединяется с корпусом выдвижного штока (2) посредством любого соединения, например резьбового. Резьбовое соединение гайки (8) с валом линейного шагового электродвигателя (10) образует винтовую пару, которая при включении линейного шагового электродвигателя (10) может перемещать втулку (6) с измерительной обмоткой (7) в обоих направлениях относительно любого положения выдвижного штока (2) с ферромагнитным наконечником (4), даже при полном втягивании выдвижного штока (2) в корпус датчика (1). Длина стального вала (9) линейного шагового электродвигателя (10), на который наворачивается либо сворачивается гайка (8), а вместе с нею и перемещается измерительная обмотка (7) на немагнитной втулке (6), должна быть немного больше длины рабочего хода выдвижного штока (2). Поступательное движение немагнитной втулки (6) обеспечивается шпоночным соединением, для этого во втулке (6) делается продольный паз, в который входит шпонка (11), которая в свою очередь вворачивается по резьбе в корпус датчика (1). Для того чтобы при больших перемещениях гайка (8) не сошла с вала (9) линейного шагового электродвигателя (10) микропрограмма управления электродвигателем использует коэффициенты, пропорциональные числу оборотов линейного шагового электродвигателя, при выходе из границ значений которых электродвигатель выключается. При вращении стального вала (9) линейного шагового электродвигателя (10) против часовой стрелки гайка (8) наворачивается на вал (9) линейного шагового электродвигателя (10) и перемещается к линейному шаговому электродвигателю (10) вместе с втулкой (6) и измерительной обмоткой (7). В случае вращения вала (9) линейного шагового электродвигателя (10) в направлении по часовой стрелке винтовая пара перемещает втулку (6) с измерительной обмоткой (7) в противоположную сторону от электродвигателя (10), т.е. к торцевому краю корпуса датчика (1). Пружина (5) соединена со штоком (2) и работает на сжатие, прижимая контактный наконечник (13) к контролируемому объекту. При освобождении штока (2) пружина (5) всегда возвращает выдвижной шток в первоначальное положение. Когда ферромагнитный наконечник (4) штока (2) располагается напротив (или, иначе говоря, становится симметричен) измерительной обмотки (7) и выравнивает индуктивные сопротивления ее обеих половин, то при включенной запитке измерительной обмотки датчика выходной сигнал будет равен нулю. Такое положение для любого индуктивного датчика является стартовым, с которого он начинает регистрировать линейные перемещения или вибрации контролируемого объекта. Таким образом, конструкция выдвижного штока (2) с одной стороны и втулка (6) с измерительной обмоткой (7) вместе с линейным шаговым электродвигателем (10) с другой стороны представляют собой две независимые, но совмещаемые конструкции.
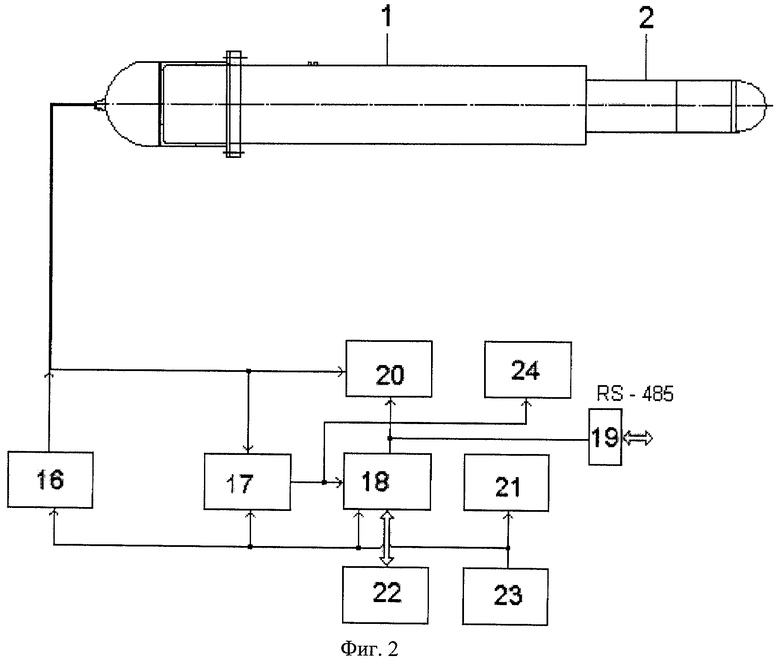
Датчик традиционно содержит также блок управления, в который входят (фиг.2): генератор синусоидального сигнала (16) для запитки измерительной обмотки датчика частотой 5 - 20 кГц и амплитудой в размахе 5 - 8 В, инструментальный усилитель (17) с коэффициентом усиления 500, многофункциональный контроллер (18), последовательный интерфейс RS-485 (19) для связи с ПК, коммутатор управления (20) линейным шаговым электродвигателем (10), жидкокристаллический индикатор (21) (при автономном управлении без участия ПК), управляющая клавиатура (22) (при автономном управлении без участия ПК) и блок питания (23) (при автономном управлении без участия ПК).
Многофункциональный контроллер (18), содержащий 6 АЦП, 2 ЦАП, 5 цифровых регистров и свою внутреннюю память для промежуточного хранения данных, обеспечивает регистрацию сигнала датчика (управление линейным шаговым электродвигателем (10), измерительной обмоткой (7)) и передачу информации на ПК или ЖК индикатор вместе с устройством ввода (клавиатурой).
Коммутатор управления (20) линейным шаговым электродвигателем (10) связывает обмотки линейного шагового электродвигателя сигналами широтно-импульсной модуляции и работает под управлением многофункционального контроллера (18). Предлагаемый датчик может работать как автономно для разового использования по предварительно заданной (прошитой) в контроллере (18) микропрограмме, так и для длительной регистрации под управлением внешнего ПК специально разработанными программами посредством соединения с помощью последовательного интерфейса RS-485. В случае автономной работы без участия ПК для управления используют ЖК индикатор и клавиатуру.
Схема управления и регистрации датчика может быть свободно встроена в многоканальную диагностическую систему контроля перемещений и вибраций либо в любую другую контролирующую систему.
Перед самым первым использованием любые датчики проходят выходной контроль на соответствие заданным техническим характеристикам. Предлагаемый датчик также проходит контроль на соответствие техническим характеристикам и получение калибровочных характеристик, учитывающих механические и электрические характеристики работы линейного шагового электродвигателя. Поскольку датчик выполняет две функции - определение линейных перемещений и определение вибраций контролируемого объекта, то для его настройки используются две калибровочные прикладные программы для ПК: для калибровки регистрации линейных перемещений и для калибровки регистрации вибраций контролируемого объекта соответственно. Процедуру калибровки датчиков проводят на лабораторном столе с использованием штатива (для установки датчика в необходимое положение). К датчику подключают вышеуказанный блок управления и регистрации, управляющий работой датчика, который в свою очередь подключается к рядом расположенному ПК. Нужно отметить, что калибровке с помощью программ датчики подвергаются всего лишь один раз. В рабочих условиях необходимость использования датчиков программы для калибровки отпадает.
Для определения линейных перемещений в предлагаемом изобретении используется величина шагов регулирования на один оборот линейного шагового электродвигателя (10). Для используемого линейного шагового двигателя типа АМ2224 - R3 линейное перемещение за один полный оборот вала соответствует 37 мкм при 24 шагах регулирования, т.е. на один шаг регулирования линейного шагового электродвигателя приходится 1,55 мкм линейного перемещения. Тогда на всю рабочую длину вала линейного шагового электродвигателя в 30 мм приходится (30000 мкм/37 мкм)·24=19460 шага регулирования. Середине же рабочей длины вала линейного шагового электродвигателя соответствует 9730 шагов регулирования.
Рассмотрим процедуру калибровки датчика на регистрацию линейных перемещений с помощью прикладной программы «Калибровка линейных перемещений», которая предназначена для установки калибровочной шкалы-зависимости выходного напряжения измерительной обмотки датчика от величины перемещения. Необходимо напомнить, что для индуктивных датчиков принято иметь присутствие сигнала датчика (а конкретно - измерительной обмотки) положительной полярности для выдвигаемого штока и отрицательной полярности - для втягиваемого в корпус датчика выдвижного штока. Для калибровки датчика при регистрации линейных перемещений в предлагаемом датчике не требуется использование специального набора точных мер толщин.
Для калибровки в режиме линейных перемещений датчик закрепляют на штативе таким образом, чтобы риска (15) выдвижного штока (2) была совмещена с краем корпуса (1) датчика. Включают блок управления и регистрации датчика, включают ПК, запускают на нем программу «Калибровка линейных перемещений» для управления линейным шаговым электродвигателем, которая с помощью вала (9) линейного шагового электродвигателя посредством вращения гайки (8) перемещает измерительную обмотку (7) из крайнего противоположного наконечнику штока положения до середины рабочей длины вала для проверки соответствия диапазона перекрытия половины штока датчика измерительной обмоткой. Одновременно ведут контроль посредством ПК над изменением сигнала с измерительной обмотки. При совмещении измерительной обмотки (7) с ферромагнитным наконечником (4) величина сигнала падает до нулевого значения, что дает сигнал к останову линейного шагового электродвигателя (10). При таком положении выдвижного штока (13) программа калибровки датчика отмечает в памяти блока управления соответствие нулевому значению сигнала датчика числу шагов регулирования линейного шагового электродвигателя, которое близко к 9730, и принимает это положение датчика как сбалансированное, т.е. нулевое. Показания оцифровываются АЦП многофункционального контроллера (18) и заносятся в память блока регистрации и управления для последующего использования в режиме измерений. На этом калибровка датчика для процедуры регистрации линейных перемещений закончена.
Калибровка датчика в режиме регистрации вибраций осуществляется с помощью прикладной программы «Калибровка вибраций». Для этого устанавливают и закрепляют датчик на штативе на лабораторном столе. Затем выдвижной шток датчика устанавливают в любое положение кроме самых крайних для упреждения невозможности свободного хода штока (2) вместе с ферромагнитным наконечником (4), при этом линейный шаговый электродвигатель (10) выключен, и, как следствие, измерительная обмотка (7) также неподвижна. Включают блок управления и регистрации датчика и запускают прикладную программу «Калибровка вибраций» на ПК. Напряжение с измерительной обмотки (7) при таком положении выдвижного штока (2) принимается за нулевой отсчет. Далее под выдвижной шток (2) поочередно подкладывают меры 0,1 мм, 0,2 мм, 0,3 мм и т.д. до 1 мм меры. Поскольку измерительная обмотка (7) неподвижна, то при подкладывании мер под выдвижной шток (2) регистрируются изменения напряжения на измерительной обмотке вследствие движения ферромагнитного наконечника (4) относительно неподвижной измерительной обмотки (7). При этом на последнем измерении при мере в 1 мм, когда сигнал датчика принимает наибольшее значение для всех этих измерений, многофункциональный контроллер (18) включает линейный шаговый электродвигатель, который подводит измерительную обмотку (7) датчика к ферромагнитному наконечнику (4) для установки нового нулевого значения. По показаниям измерения значений мер толщины программа «Калибровка вибраций» осуществляет построение калибровочной характеристики - величины линейного перемещения (мкм) выдвижного штока (2) от величины напряжения на измерительной обмотке (7) датчика, из которой делается вывод о соответствии величины перемещения значениям напряжения. С помощью программы просчитывают количество шагов регулирования линейным шаговым электродвигателем от первой нулевой отметки до последней при подкладывании заключительной меры в 1 мм, а также устанавливают соотношение между величиной сигнала датчика и числом шагов регулирования электродвигателя. Полученные характеристики оцифровываются АЦП многофункционального контроллера (18) и заносятся в память блока управления и регистрации для последующего использования при регистрации вибраций. На этом калибровка датчика для процедуры регистрации вибраций закончена.
Реализацию работы датчика линейных перемещений и вибраций осуществляют в основном в составе многоканальной системе диагностики, которая проводит контроль линейных перемещений и вибраций в нескольких точках контролируемого объекта. Контроль такого рода, как правило, начинается с контроля линейных перемещений в режиме перехода от статичного спокойного состояния объекта к рабочему устойчивому, например при нагревании или деформации, и затем, после достижения рабочего устойчивого режима и при отсутствии дальнейших изменений в текущем равновесном рабочем состоянии контролируемого объекта, следует автоматический переход на режим контроля вибраций (поскольку время выхода контролируемого объекта в рабочий устойчивый режим может длиться от нескольких часов и более). На монитор ПК (в случае автономной работы - ЖК индикатор) при этом выводится как текущая информация, выраженная в единицах перемещений (мм) и вибраций (мкм), так и почасовая. Записанную на жесткий диск почасовую информацию используют в аналитических программах контроля за положением и вибрацией контролируемого объекта.
Сама же работа датчика в режиме измерения линейных перемещений осуществляется следующим образом. Установку датчика осуществляют на остановленном (в выключенном или находящимся в состоянии покоя) контролируемом объекте. Корпус датчика (1) закрепляют на кронштейне либо штативе около контролируемого объекта таким образом, чтобы контактный наконечник (13) выдвижного штока (2) датчика упирался в контролируемую точку объекта, а риска (15) на выдвижном штоке (2) была совмещена как можно точнее с передним краем корпуса датчика (1), то есть достигнуто предварительно откалиброванное нулевое значение. Включают блок управления и регистрации вместе с программами регистрации на ПК. Включают в работу объект, подвергающийся контролю. Как только контролируемый объект приходит в движение, выдвижной шток датчика перемещается вместе с ним в сторону изменения положения объекта и многофункциональный контроллер (18) определяет направление (знак) движения штока (2) вместе с ферромагнитным наконечником (4), после чего автоматически включает линейный шаговый электродвигатель (10) для перемещения втулки (6) с измерительной обмоткой (7) в сторону изменения знака до положения совмещения с ферромагнитным наконечником (4) на штоке (2) и получения нулевого сигнала с измерительной обмотки (положения нового баланса), по достижении которого электродвигатель (10) останавливается. Многофункциональным контроллером (18) регистрируется количество шагов регулирования, пройденное выдвижным штоком (2) датчика из первоначального положения до полного его останова, т.е. до положения нового баланса. Таким образом, линейные перемещения объекта вычисляются посредством умножения количества шагов регулирования линейного шагового электродвигателя на величину шага регулирования, равную 1,55 мкм, и результат выдается на экран ПК как величина линейного перемещения вместе со знаком (направлением) перемещения. Вывод о направлении перемещения движения измерительной обмотки делается по движению ее внутрь или наружу относительно балансного значения. В данном случае в режиме измерения линейных перемещений линейное перемещение выдвижного штока датчика определяют не по величине сигнала датчика (напряжения U), как обычно бывает, а по величине шагов регулирования линейного шагового электродвигателя между двумя нулевыми (балансными) значениями, с точностью до одного шага регулирования электродвигателя в 1,55 мкм.
В случае, когда направление изменения положения контролируемого объекта известно заранее (например изменения трубы в результате теплового расширения), процедура замеров аналогична с той только разницей, что измерение линейного перемещения могут проводить из любого крайнего положения вала (9) линейного шагового электродвигателя, используя всю рабочую длину вала электродвигателя, принимая при этом одно из крайних положений установки за абсолютный ноль, относительно которого будут учитываться новые перемещения штока со своими знаками, т.е. устанавливают датчик в балансное нулевое положение, установив измерительную обмотку (7) в любое крайнее положение, а выдвижной шток (13) отводят в противоположное крайнее положение до упора с объектом контроля. Т.е. обеспечивают максимальный диапазон измерений.
После n-го количества таких циклов (коих может быть сколь угодно много) и, как следствие, достижения рабочего устойчивого режима и при отсутствии дальнейших изменений в текущем равновесном рабочем состоянии контролируемого объекта происходит автоматический переход на режим контроля вибраций.
Режим контроля вибраций осуществляется следующим образом. После достижения рабочего устойчивого режима контролируемого объекта и при отсутствии дальнейших изменений в этом состоянии многофункциональный контроллер (18) отключает линейный шаговый электродвигатель (10) при любом положении штока (2) кроме крайнего. Величина напряжения с измерительной обмотки (7) в таком положении штока с ферромагнитным наконечником (4) принимается за точку отсчета (ноль). Поскольку измерительная обмотка (7) также неподвижна, то вибрации контролируемого объекта регистрируются вследствие движения ферромагнитного наконечника относительно неподвижной измерительной обмотки посредством изменения напряжения на измерительной обмотке. Показания напряжения с обмотки фиксируются АЦП многофункционального контроллера (18). По завершении процедуры измерения вибраций контролируемого объекта замеренные показания напряжения переводятся в величину перемещений в соответствии с калибровочной зависимостью.
Сама запись показаний вибрации контролируемого объекта, имеющего несколько степеней свободы, имеет сложный вид и выглядит как сложная синусоидальная функция. По результату спектрального анализа судят о наличии определенных собственных (полезных), а также посторонних (вредных - например, нецентровка или биения) частот оборудования, т.е. о работе контролируемого объекта судят не по величине отклонений объекта, что тоже важно, но в большей степени по результату спектрального анализа сигнала датчика при вибрации контролируемого объекта.
Поскольку процесс регистрации линейных перемещений с последующей регистрацией вибраций долгий процесс, то возможна работа датчика в многосуточном режиме.
Предлагаемый датчик не критичен к положению и месту крепления корпуса датчика по отношению к контролируемому объекту при проведении измерений, поскольку перемещающаяся измерительная обмотка датчика при любом положении выдвижного штока всегда позволяет проводить балансировку датчика при любом положении выдвижного штока. Предлагаемый датчик прошел лабораторные испытания, показав высокую точность определения линейных перемещений, используя величину шага регулирования линейного шагового электродвигателя, и вибраций.
Таким образом, изобретением достигается заявленный технический результат и высокая чувствительность датчика благодаря параметрам измерительной обмотки вкупе с оперативностью работы, как в режиме регистрации линейного перемещения, так и в режиме регистрации вибраций контролируемого объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2375674C2 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ И ВИБРАЦИЙ | 2016 |
|
RU2618625C1 |
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2037769C1 |
| Датчик линейных перемещений | 1986 |
|
SU1366867A1 |
| КОЛЕБАТЕЛЬНЫЙ СТРУКТУРОМЕТР | 2016 |
|
RU2625535C1 |
| КОЛЕБАТЕЛЬНЫЙ СДВИГОМЕТР | 2011 |
|
RU2454655C1 |
| КОЛЕБАТЕЛЬНЫЙ СТРУКТУРОМЕТР | 2014 |
|
RU2574523C1 |
| АВТОНОМНЫЙ УЗЕЛ ТРЕНИЯ ДЛЯ ИСПЫТАТЕЛЬНОГО ОБОРУДОВАНИЯ НА ТРЕНИЕ И ИЗНОС | 2024 |
|
RU2823582C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2168836C1 |
| Датчик контроля разделения объектов | 1988 |
|
SU1610517A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля линейных перемещений и вибраций различных узлов и оборудования, например, на атомных электростанциях, а также на объектах с вредными условиями труда. Сущность изобретения заключается в датчике линейных перемещений, содержащем корпус, размещенные в нем линейный шаговый электродвигатель, подпружиненный относительно корпуса выдвижной шток с риской, размещенный соосно с ним контактный наконечник, немагнитную втулку, соединенную с корпусом датчика шпоночным соединением, на которой закреплена измерительная обмотка и к свободному концу которой присоединена гайка, образующая винтовую пару со стальным валом линейного шагового электродвигателя, внутренний стержень, закрепленный в корпусе выдвижного штока гайкой. В датчике используется измерительная обмотка с длиной намотки 10 мм и толщиной провода не более 0,1 мм для регистрации 30 мм линейных перемещений и 600 мкм вибраций, при этом соосно с контактным наконечником размещен ферромагнитный наконечник с возможностью перемещения относительно немагнитной втулки. Техническим результатом данного изобретения является упрощение схемы регистрации сигнала датчика и управления линейным шаговым двигателем, повышение точности, надежности, безопасности и оперативности работы одним датчиком, как в режиме регистрации линейного перемещения, так и в режиме регистрации вибраций контролируемого объекта. 1 з.п. ф-лы, 2 ил.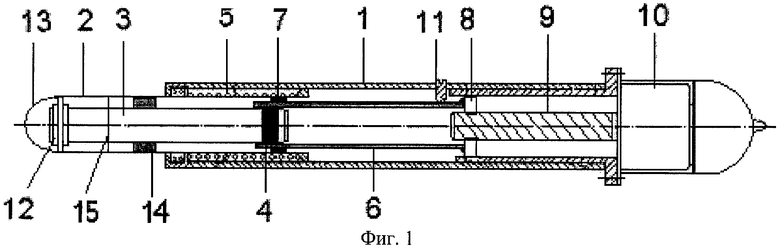
1. Датчик линейных перемещений, содержащий корпус, размещенные в нем линейный шаговый электродвигатель, подпружиненный относительно корпуса выдвижной шток с риской, размещенный соосно с ним контактный наконечник, немагнитную втулку, соединенную с корпусом датчика шпоночным соединением, на которой закреплена измерительная обмотка и к свободному концу которой присоединена гайка, образующая винтовую пару со стальным валом линейного шагового электродвигателя, внутренний стержень, закрепленный в корпусе выдвижного штока гайкой, отличающийся тем, что в датчике используется измерительная обмотка с длиной намотки 10 мм и толщиной провода не более 0,1 мм для регистрации 30 мм линейных перемещений и 600 мкм вибраций, при этом соосно с контактным наконечником размещен ферромагнитный наконечник с возможностью перемещения относительно немагнитной втулки.
2. Датчик по п.1, отличающийся тем, что линейные перемещения определяются по числу шагов регулирования линейного шагового электродвигателя.
| ДАТЧИК ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2375674C2 |
| US 7432497 В2, 07.10.2008 | |||
| JP 0057042811 А, 10.03.1982. | |||

