Изобретение относится к устройствам для определения магнитного курса, в частности к дистанционным компасам.
Бездевиационный электронный компас, предназначен для использования преимущественно на подвижных объектах (в дальнейшем судах) для ориентации их по отношению к магнитному полю Земли и, в частности, определения направления их движения. Предлагаемое устройство может быть использовано для управления курсом судов.
Известные компасы содержат феррозонд, устройства, обеспечивающие его работу и формирование сигналов, несущих информацию о направлении магнитного поля Земли, а также соответствующее устройство отображения полученной информации.
Недостатком этих устройств является низкая точность, обусловленная девиацией, создаваемой судном, на котором установлен компас, а также необходимость периодического уничтожения этой девиации.
Прототипом заявляемого устройства является электронный компас, содержащий двухкомпонентный феррозонд кольцевого типа (в дальнейшем феррозонд), генератор, удвоитель частоты, первый и второй избирательные усилители, первый и второй фазовые детекторы (в дальнейшем, для простоты рассмотрения, эти узлы объединены в единый функциональный узел, который будет называть преобразователь), на выходах которых формируются напряжения Uxh K˙H ˙cos F и Uyh K˙H˙sin F, а также первый и второй усилители тока и индикатор (в дальнейшем усилители тока из рассмотрения исключаются как не несущие существенных признаков) [1] Здесь были приняты следующие обозначения: Uxh и Uyh напряжения на выходах преобразователя; К коэффициент пропорциональности; Н величина, характеризующая напряженность горизонтальной составляющей магнитного поля Земли; F угол между направлением суммарного магнитного поля в месте установки феррозонда и положением (направлением движения) судна.
Недостатком прототипа является низкая точность, обусловленная девиацией компаса, создаваемой судовым железом.
Целью изобретения является повышение точности компаса.
Цель достигается тем, что в устройство, содержащее феррозонд, преобразователь и индикатор, дополнительно введены второй феррозонд, второй преобразователь, задатчик и вычислитель, работающий по специальному алгоритму, причем второй феррозонд расположен ближе к судну, выходы первого и второго феррозондов подключены к входам первого и второго преобразователей соответственно, выходы первого преобразователя подключены к первому и второму входам вычислителя, выходы второго преобразователя подключены к третьему и четвертому входам вычислителя, выход задатчика подключен к пятому входу вычислителя, выходы которого подключены к соответствующим входам индикатора.
Предлагаемые дополнения в известный электронный компас обеспечивают измерение и учет девиации, создаваемой судном при любом его направлении, что повышает точность определение курса.
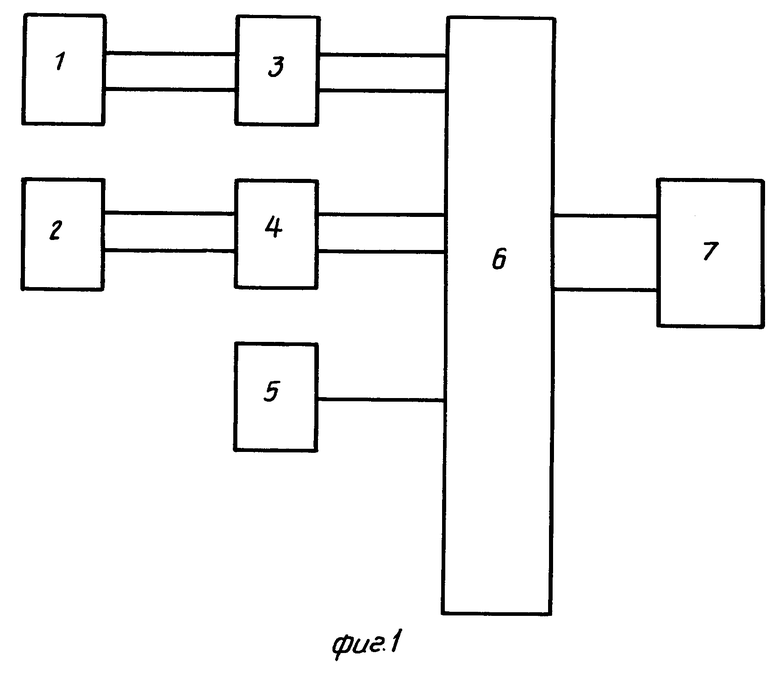
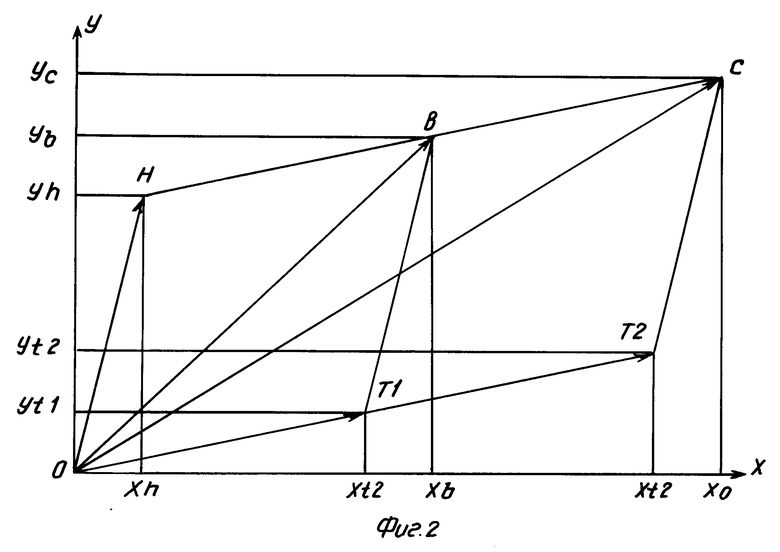
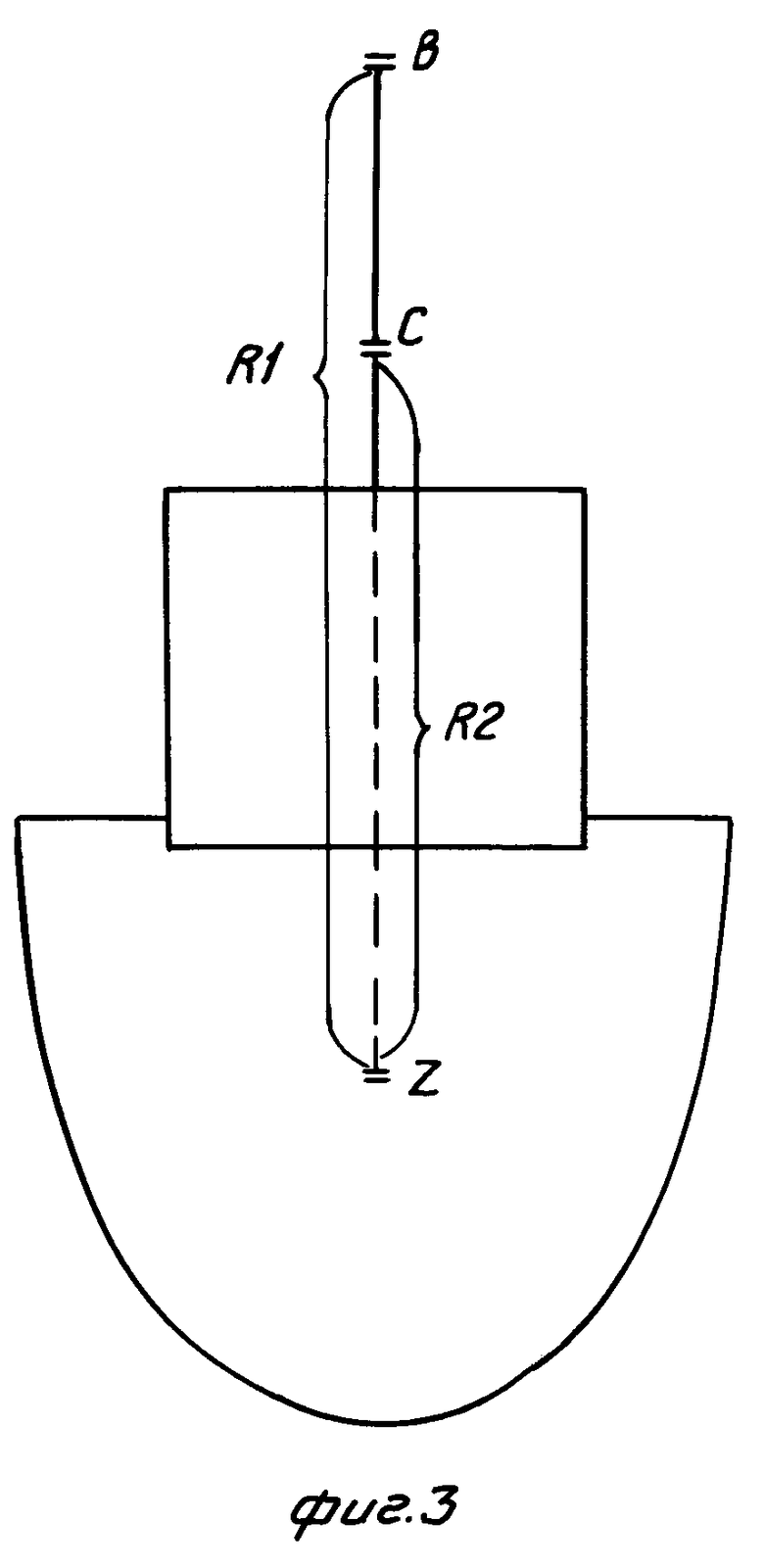
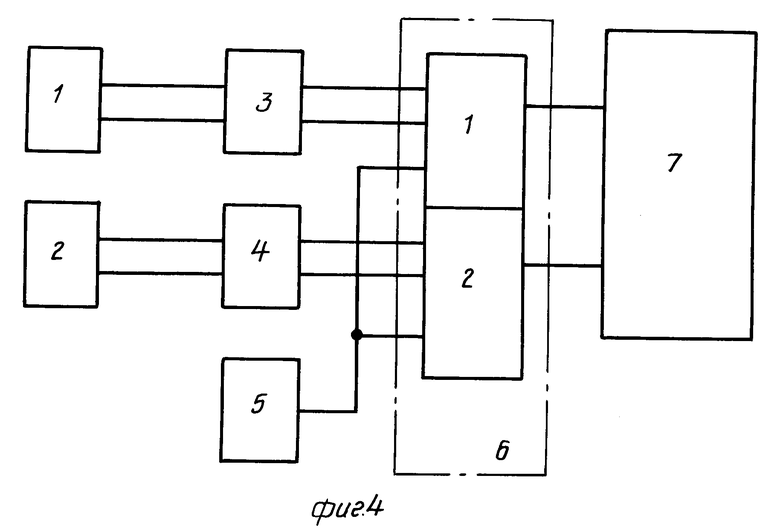
На фиг. 1 представлена блок-схема предлагаемого бездевиационного электронного компаса; на фиг. 2 расчетная схема магнитных полей, действующих на первый и второй феррозонды; на фиг. 3 представлена расчетная схема для определения составляющих магнитного поля судна на каждый из феррозондов; на фиг. 4 блок-схема предлагаемого бездевиационного компаса в варианте с аналоговым вычислительным устройством.
Компас состоит из (см. фиг. 1 и 4) первого 1 (верхнего) и второго 2 (нижнего) феррозондов, первого 3 и второго 4 преобразователей, задатчика 5, вычислителя 6 и индикатора 7.
Устройство блоков 1-4 соответствует аналогичным по назначению блокам устройства-прототипа.
Задатчик 5 представляет собой потенциометр, на выходе которого устанавливается постоянное напряжение. Вычислитель 6 реализован на основе аналого-цифрового микропроцессорного устройства или на основе операционных усилителей. Индикатор 7 аналогичен соответствующему блоку устройства-прототипа.
Для определения алгоритма работы вычислителя примем следующие допущения.
Магнитное поле Земли в объеме, занимаемом судном, является однородным, горизонтальная составляющая Н этого поля не меняется при изменении местоположения феррозонда на судне.
Магнитное поле судна может быть представлено как магнитное поле линейного бруска, напряженность магнитного поля которого прямо пропорциональна магнитному моменту этого бруска и обратно пропорциональна кубу расстояния от центра бруска до феррозонда.
Компас на судне показывает направление силовых линий результирующего магнитного поля, составленного из горизонтальной составляющей магнитного поля Земли Н и горизонтальной составляющей магнитного поля судна Т. Тогда вектор DB магнитного поля, действующего на первый феррозонд, определится как геометрическая сумма его составляющих Н и Т1, а вектор ОС как сумма Н и Т2.
В нижеприведенных выражениях приняты следующие обозначения: F угол между вектором Н и осью Х; Uxb напряжение на выходе канала Х блока 3; Uyb напряжение на выходе канала Y блока 3; Uxc напряжение на выходе канала Х блока 4; Uyc напряжение на выходе канала Y блока 4; Uxh напряжение на выходе канала Х блока 6; Uyh напряжение на выходе канала Y блока 6; UL напряжение на выходе задатчика 5; К коэффициент пропорциональности; DB вектор суммарного магнитного поля, действующего на верхний феррозонд 1; ВОХ угол между вектором ОВ и координатной осью Х; Xb координата Х точки В вектора ОВ; Yb координата Y точки В вектора ОВ; ОС вектор суммарного поля, действующего на нижний феррозонд 2; СОХ угол между вектором ОС и координатной осью Х; Хс координата Х точки С вектора ОС; Yc координата Y точки С вектора ОС; Н вектор горизонтальной составляющей поля Земли; Т1 вектор магнитного поля судна, действующий на верхний феррозонд; Т2 вектор магнитного поля судна, действующий на нижний феррозонд; L отношение векторов полей судна, действующих на верхний и нижний феррозонды соответственно (L T1/T2); R1 расстояние от магнитного центра судна до первого феррозонда (см.фиг.3); R2 расстояние от магнитного центра судна до второго феррозонда; Z магнитный центр судна (центр магнитного бруска, имитирующего судно).
В соответствии с вышеизложенным, на выходах блока 3 (первый, верхний феррозонд) будут присутствовать напряжения:
Uxb K ˙(OB˙cos BOX) K ˙Xb;
Uyb K˙(OB ˙sin BOX) K ˙Yb, а на выходах блока 4 (второй, нижний феррозонд):
Uxc K ˙(OC˙ cos COX) K ˙Xc,
Uyc K ˙(OC˙ sin COX) K ˙Yx
Алгоритм работы вычислителя 6 должен определять величины Хh и Yhпри известных значениях величин Xb; Xc; Yb; Yc и L по формулам (см.схему на фиг.2):
Xh (1)
(1)
Yh (2) где L
(2) где L 
 (3)
(3)
Величина L определяется из следующих соображений:
L  (4) которое в свою очередь получено, исходя из того, что:
(4) которое в свою очередь получено, исходя из того, что:
tgF 
 (5)
(5)
Курсовой угол судна F здесь должен быть получен по береговому ориентиру, направление на который известно заранее.
Величины (L˙Yc Yb) и (L˙Xc Xb), отношение которых определяет курс судна (см.выражение (5)), могут быть вычислены с использованием параллельного сумматора, описанного в книге А.Г.Алексенко и др. Применение прецизионных аналоговых микросхем. М. Радио и связь, 1985, с. 91, рис. 2.236.
Блок-схема предлагаемого устройства для этого случая представлена на фиг. 4. Вычислитель 6 здесь представлен двумя параллельными сумматорами 1 и 2. Коэффициент усиления неинвертирующего входа каждого из них устанавливается задатчиком 5, а усиление инвертирующего входа всегда равно единице.
Алгоритм работы вычислителя.
1. Прочитать значения Xb, Xc, Yb, Yc и L на входах вычислителя.
2. Вычислитель Xh и Yh по формулам:
Xh Yh
Yh
3. Подать полученные значения Xh и Yh на выходы вычислителя.
4. Перейти к выполнению п.1 программы.
Работа компаса. Пеpвоначальное после монтажа включение компаса необходимо осуществлять в условиях, позволяющих определить курсовое положение судна по береговым или иным ориентирам.
После включения компаса на выходах феррозондов появляются переменные напряжения, которые в блоках 3 и 4 преобразуются в постоянные с амплитудами, соответствующими угловому положению феррозонда по отношению к геометрической сумме магнитного поля Земли и магнитного поля судна. Эти показания до определения L могут быть неверными. Правильные показания компаса будут обеспечены только при значении L, соответствующем L T1/T2.
Для получения правильного значения курса необходимо установить задатчик 6 в положение, при котором показания компаса будут правильными. Эта операция должна проводиться с использованием береговых или иных ориентиров, направление на которые известно заранее. После этого компас готов к работе.
Все вышеназванные напpяжения: Uxc и Uyc с выходов блока 3, Uxb и Uyb с выходов блока 4 и UL с выхода блока 5 поступают на входы вычислителя 6.
Вычислитель 6 периодически опрашивает выходы блоков 3-5, производит вычисление
Xh Yh
Yh и выдает результат этих вычислений (Uxh и Uyh) на свои выходы.
и выдает результат этих вычислений (Uxh и Uyh) на свои выходы.
Напряжения Uxh и Uyh поступают на входы индикатора 7, который выдает соответствующие показания.
При изменении положения судна относительно магнитного поля Земли меняются сигналы на выходах феррозондов 1 и 2, соответственно меняются сигналы на входах и выходах вычислителя 6, а значит, соответственно будут меняться и показания индикатора 7.
Девиация судна не влияет на показания компаса, так как магнитное поле судна по-разному действует на феррозонды, установленные на разном расстоянии от судна, поэтому соотношения напряжений на выходах феррозондов несут информацию о магнитном поле судна, а алгоритм вычислительного устройства учитывает влияние магнитного поля судна на показания компаса.
При изменении загрузки судна величина L может измениться. Тогда необходимо вновь установить задатчик 5 в положение, обеспечивающее правильные показания компаса, что намного проще, чем выполнение девиационных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой компас | 1986 |
|
SU1348648A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| ЭЛЕКТРОННЫЙ МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2331843C2 |
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2302615C1 |
| Стабилизатор курса речных судов | 1972 |
|
SU449853A1 |
Использование: в устройствах для определения магнитного курса, в частности в дистанционных компасах, и может быть использовано для определения магнитного курса подвижных объектов и управления ими. Устройство обеспечивает измерение и учет девиации компаса на каждом измеряемом курсе, что повышает точность определения курса и делает ненужным периодическое устранение девиации. Сущность изобретения: бездевиационный электронный компас содержит два террозонда, два преобразователя, задатчик, вычислитель, индикатор. 4 ил.
БЕЗДЕВИАЦИОННЫЙ ЭЛЕКТРОННЫЙ КОМПАС, содержащий феррозонд, двумя выходами соединенный с соответствующими входами преобразователя, и индикатор, отличающийся тем, что, с целью повышения точности, в него введены дополнительный феррозонд, расположенный по одной вертикали с феррозондом ближе к судну, дополнительный преобразователь, два входа которого соединены с соответствующими двумя выходами дополнительного феррозонда, два задатчика и вычислитель, первый и второй выходы которого соединены с соответствующими двумя входами индикатора, при этом первый и второй выходы преобразователей подключены к первому, второму, третьему и четвертому входам вычислителя соответственно, пятой и шестой входы которого соединены соответственно с выходами первого и второго задатчиков.
| Электронный компас | 1974 |
|
SU495528A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
