Предлагаемое изобретение относится к области приборостроения, в частности к индукционным магнитным компасам.
Известны индукционные магнитные компасы, индукционный чувствительный элемент которых расположен в кардановом подвесе, снабженном физическим маятником [Кардашинский-Брауде Л.А. Современные судовые магнитные компасы. - Санкт-Петербург, ГНЦ РФ ЦНИИ «Электроприбор», 1999, с.78-79].
Недостатком таких компасов являются значительные погрешности, возникающие вследствие погрешностей отклонения маятника на качке и вибрации.
Известен принятый за прототип компас ДС-83, содержащий акселерометры и индукционный чувствительный элемент, неподвижный относительно системы координат, связанной с судном. Влияние углов качки судна учитывается в вычислителе компаса с использованием сигналов акселерометров [Кардашинский-Брауде Л.А. Современные судовые магнитные компасы. - Санкт-Петербург, ГНЦ РФ ЦНИИ «Электроприбор», 1999, с.78, 81.].
Недостатком прототипа является необходимость участия оператора в процессе определения девиационных поправок.
Задачей изобретения является повышение точности компаса путем автоматизированного определения и учета полукруговой и четвертной девиационных поправок. Задача решается тем, что в электронный магнитный компас, содержащий три магнитометра с ортогональными осями чувствительности, три акселерометра с ортогональными осями чувствительности, устройство преобразования сигналов магнитометров, устройство согласования сигналов акселерометров, аналого-цифровые преобразователи, цифровой модуль вычисления курса, устройство индикации курса и устройство питания, введены цифровой модуль расчета коэффициентов девиационных поправок и цифровой модуль контроля полной циркуляции, выход которого соединен с управляющим входом цифрового модуля расчета коэффициентов девиационных поправок, информационные входы цифрового модуля расчета коэффициента девиационных поправок через аналого-цифровой преобразователь соединены с выходами магнитометров, а информационный выход цифрового модуля расчета коэффициента девиационных поправок соединен со входом цифрового модуля вычисления курса, выход которого соединен с устройством индикации курса и со входом цифрового модуля контроля полной циркуляции.
Сущность предлагаемого устройства показана на фиг.1.
Электронный магнитный компас содержит три магнитометра 1, 2, 3 с ортогональными осями чувствительности, три акселерометра 4, 5, 6 с ортогональными осями чувствительности, преобразователи 7а, 7b, 7с сигналов магнитометров, устройства 8а, 8b, 8с согласования сигналов акселерометров, аналого-цифровые преобразователи 9, 13, цифровой модуль 10 вычисления курса, устройство 11 индикации измеренного курса, устройство 12 электропитания, цифровой модуль 14 расчета коэффициентов девиационных поправок, цифровой модуль 15 контроля полной циркуляции судна. Электрически выходы магнитометров 1, 2, 3 через преобразователи 7 сигналов магнитометров соединены со входами аналого-цифрового преобразователя 9, выходы акселерометров 4, 5, 6 через устройство 8 согласования сигналов соединены с другими входами аналого-цифрового преобразователя 9, выход которого соединен со входом цифрового модуля 10 вычисления курса. Информационный выход цифрового модуля 10 подключен к устройству 11 индикации измеренного курса и одновременно ко входу цифрового модуля 15, выход которого соединен с управляющим входом цифрового модуля 14 расчета коэффициентов девиационных поправок, ко входу которого через аналого-цифровой преобразователь 13, преобразователи 7 подключены магнитометры 1 и 2. Выход модуля 14 подключен ко второму входу цифрового модуля 10 вычисления курса. Все узлы и модули компаса питаются от устройства электропитания 12. На фиг.1 связи устройства электропитания 12 с другими узлами и модулями не показаны.
Электронный магнитный компас функционирует следующим образом. Сигналы магнитометров 1, 2, 3, пропорциональные проекциям X1, Y1, Z1 вектора суммарной напряженности магнитных полей Земли и судна в месте установки магнитометров, проходя через преобразователи 7 сигналов магнитометров и аналого-цифровой преобразователь 9, поступают в цифровой модуль 10 вычисления курса. Аналогичным образом в этот модуль 10 через устройство согласования 8 и аналого-цифровой преобразователь 9 поступают сигналы ах, аy, аz от акселерометров 4, 5, 6.
С использованием величин X1, Y1, Z1 и аx, аy, az в цифровом модуле 10 вычисляются горизонтальные составляющие  ,
,  суммарной напряженности магнитного поля в месте установки магнитометров 1, 2, 3 и по известной формуле
суммарной напряженности магнитного поля в месте установки магнитометров 1, 2, 3 и по известной формуле

компасный курс К1 [Кардашинский-Брауде Л.А. Современные судовые магнитные компасы. - Санкт-Петербург, ГНЦ РФ ЦНИИ «Электроприбор», 1999, с.79].
Однако наличие девиации, источником которой служит намагниченность судна, приводит к отличию компасного курса К1 от магнитного курса К. Определение и учет этого отличия в заявленном устройстве производится следующим образом. Осуществляется полная циркуляция судна. С началом циркуляции в цифровые модули 14 и 15 подается команда о начале режима определения коэффициентов девиации. По этой команде в памяти цифрового модуля 14 накапливается массив значений  ,
,  , в цифровом модуле 15 производится вычисление скорости изменения компасного курса dK1/dt и сравнение полученного в начале циркуляции начального значения
, в цифровом модуле 15 производится вычисление скорости изменения компасного курса dK1/dt и сравнение полученного в начале циркуляции начального значения  компасного курса с текущим значением
компасного курса с текущим значением  компасного курса. В момент совпадения значений
компасного курса. В момент совпадения значений  с
с  при условии, что в промежуток времени между этими точками знак dK1/dt не менялся, из цифрового модуля 15 в цифровой модуль 14 выдается команда о прекращении накопления значений X1, Y1. После этого по накопленному массиву значений Х1, Y1 в цифровом модуле 14 по нижеприведенным формулам рассчитываются параметры, входящие в девиационные поправки (обоснование формул приведено далее).
при условии, что в промежуток времени между этими точками знак dK1/dt не менялся, из цифрового модуля 15 в цифровой модуль 14 выдается команда о прекращении накопления значений X1, Y1. После этого по накопленному массиву значений Х1, Y1 в цифровом модуле 14 по нижеприведенным формулам рассчитываются параметры, входящие в девиационные поправки (обоснование формул приведено далее).
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Вычисленные значения  ,
,  , R передаются из цифрового модуля 14 в цифровой модуль 10, где с их использованием вычисляются поправки DX, DY к измеренным значениям проекций X1, Y1 вектора суммарной напряженности магнитного поля:
, R передаются из цифрового модуля 14 в цифровой модуль 10, где с их использованием вычисляются поправки DX, DY к измеренным значениям проекций X1, Y1 вектора суммарной напряженности магнитного поля:
 ;
;
 ;
;
 ;
;
 .
.
С учетом поправок DX, DY вычисляются проекции X, Y вектора напряженности магнитного поля Земли в месте установки магнитометров
X=X1-DX;
Y=Y1-DY,
которые используются для вычисления магнитного курса судна по формуле
K=arctgY/X.
Ниже приведено обоснование формул расчета девиационных поправок, приведенных в заявке.
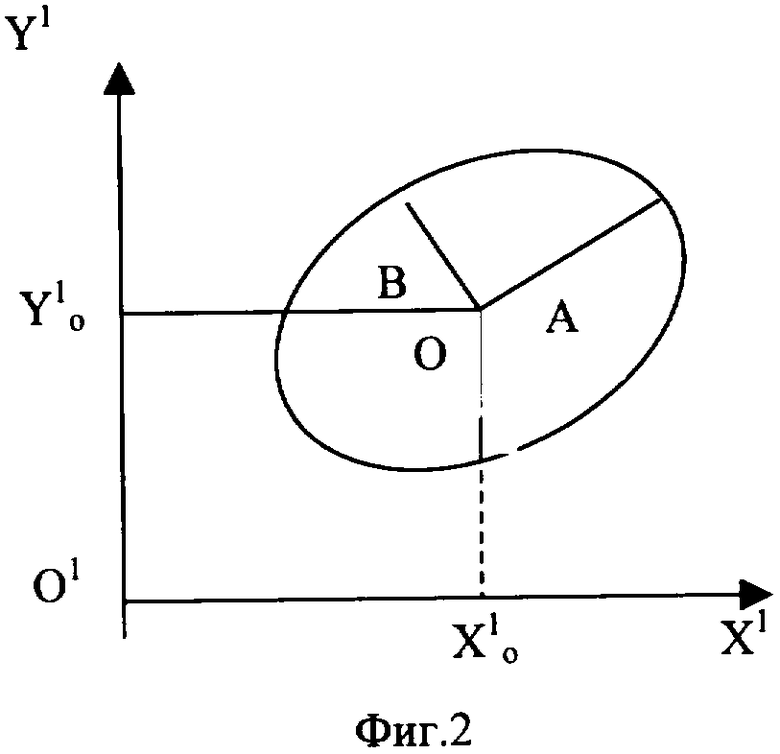
Годограф суммарного вектора напряженности магнитных полей Земли и судна при циркуляции последнего представляет эллипс, центр которого смещен относительно начала координат, связанных с магнитометрами [Кардашинский-Брауде Л.А. Современные магнитные компасы. С.Петербург, ГНЦ РФ ЦНИИ "Электроприбор", 1999, с.80]. На фиг.2 представлен такой эллипс на плоскости X1, Y1 составляющих суммарной напряженности магнитных полей Земли и судна.
Из фиг.2 следует, что координаты центра эллипса равны

Полуоси А, В эллипса определяются выражениями
 ;
;
 .
.
Радиус равновеликой по площади эллипсу окружности равен

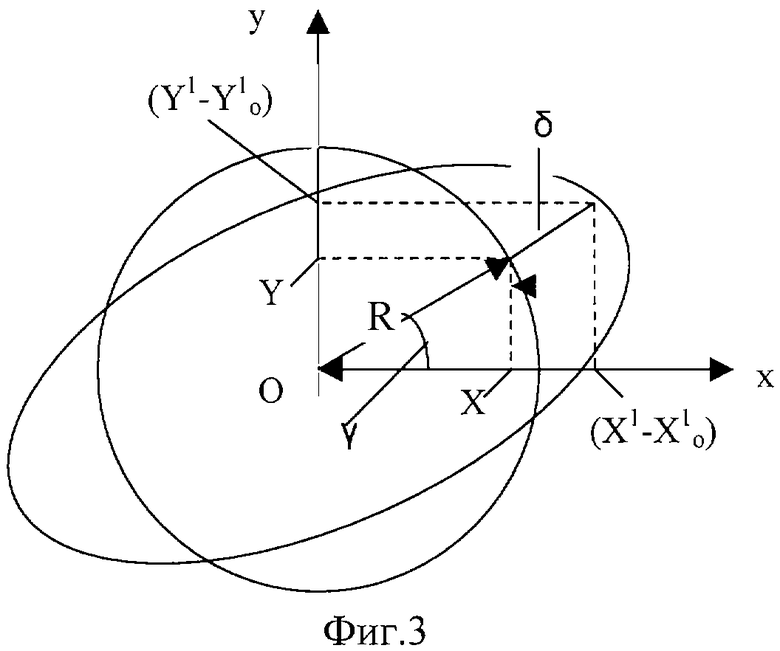
Центрированный эллипс и равновеликая по площади окружность представлены на фиг.3. На фигуре обозначены Х и Y проекции вектора напряженности магнитного поля Земли в месте установки магнитометров. Из фиг.3 следует


Из этой же фиг.3 видно, что проекции X, Y вектора напряженности магнитного поля Земли равны
 ;
;
 ,
,
т.е.
X=X1-DX;
Таким образом девиационные поправки равны:
 ;
;

Из приведенных соотношений следует методика определения поправок на полукруговую и четвертную девиацию в вычислителе магнитного компаса.
Производят полную циркуляцию судна. С началом циркуляции в памяти вычислителя накапливаются массивы измеренных значений X1, Y1 (количество точек в массиве определяется скоростью циркуляции и дискретом измерений). По окончании полной циркуляции в вычислителе по формулам (1, 2, 3) вычисляются параметры  ,
,  и R. Далее в процессе работы компаса для каждой пары измеренных значений X1, Y1 в вычислителе по формулам (4, 5) определяются коэффициенты δ, y и по формуле (7) девиационные поправки DX, DY к измеренным проекциям X1, Y1 вектора суммарной напряженности магнитного поля Земли и судна. С помощью поправок проекции X1, Y1 в вычислителе преобразуются по формулам (6) в проекции X, Y вектора напряженности магнитного поля Земли в месте установки магнитометра.
и R. Далее в процессе работы компаса для каждой пары измеренных значений X1, Y1 в вычислителе по формулам (4, 5) определяются коэффициенты δ, y и по формуле (7) девиационные поправки DX, DY к измеренным проекциям X1, Y1 вектора суммарной напряженности магнитного поля Земли и судна. С помощью поправок проекции X1, Y1 в вычислителе преобразуются по формулам (6) в проекции X, Y вектора напряженности магнитного поля Земли в месте установки магнитометра.
Заявленная совокупность признаков достаточна для решения поставленной задачи и реализована в действующем макете.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ СКВАЖИННОГО ИНКЛИНОМЕТРА И ИНКЛИНОМЕТР, В КОТОРОМ РЕАЛИЗОВАН ДАННЫЙ СПОСОБ | 2008 |
|
RU2368775C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| Электронный компас для подвижного объекта | 2024 |
|
RU2829808C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2104489C1 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2006 |
|
RU2330303C2 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО АЗИМУТА В СКВАЖИННОМ ИНКЛИНОМЕТРЕ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290673C2 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
Изобретение относится к области приборостроения, в частности к индукционным магнитным компасам. Технический результат - повышение точности компаса путем автоматизированного определения и учета полукруговой и четвертной девиационных поправок. Задача решается тем, что в электронный магнитный компас, содержащий три магнитометра с ортогональными осями чувствительности, три акселерометра с ортогональными осями чувствительности, устройство преобразования сигналов магнитометров, устройство согласования сигналов акселерометров, аналого-цифровые преобразователи, цифровой модуль вычисления курса, устройство индикации курса и устройство питания, введены цифровой модуль расчета коэффициентов девиационных поправок и цифровой модуль контроля полной циркуляции, выход которого соединен с управляющим входом цифрового модуля расчета коэффициентов девиационных поправок, информационные входы цифрового модуля расчета коэффициента девиационных поправок через аналого-цифровой преобразователь соединены с выходами магнитометров, а информационный выход цифрового модуля расчета коэффициента девиационных поправок соединен со входом цифрового модуля вычисления курса, выход которого соединен с устройством индикации курса и со входом цифрового модуля контроля полной циркуляции. 3 ил.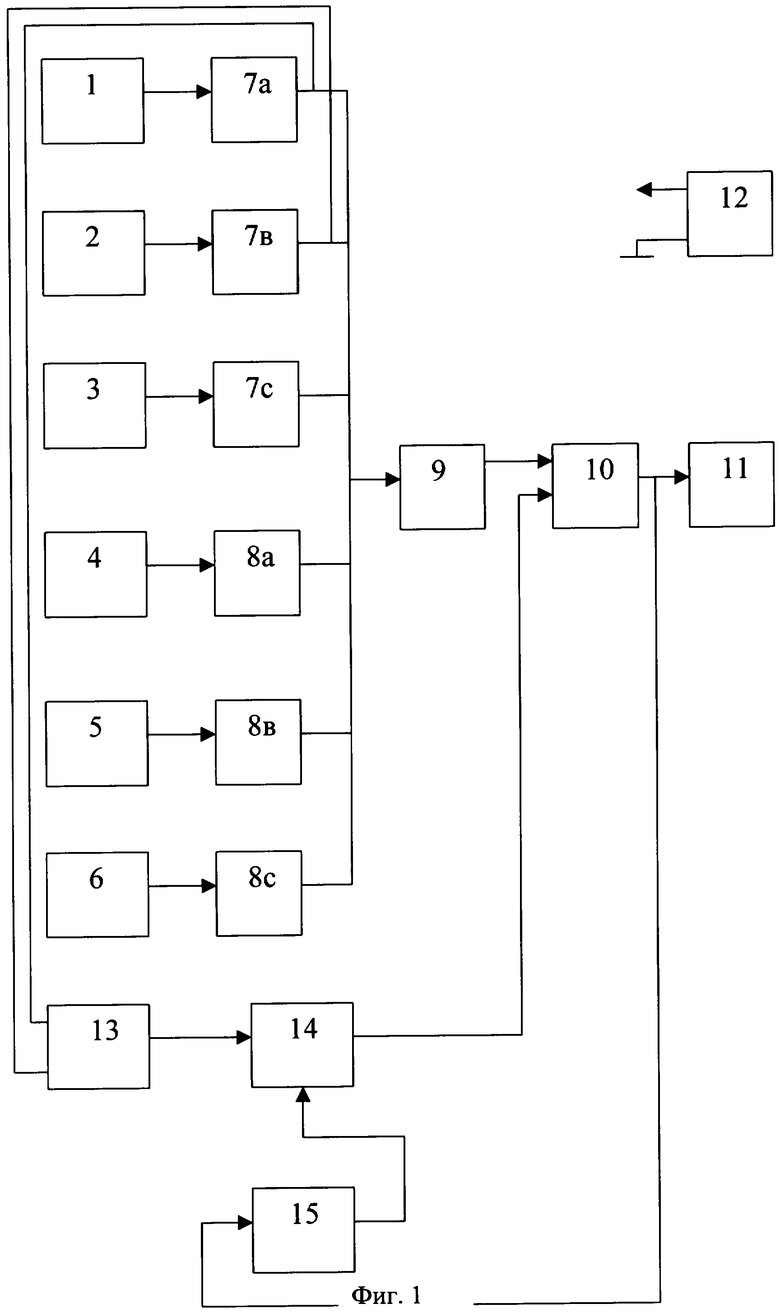
Электронный магнитный компас, содержащий три магнитометра с ортогональными осями чувствительности, три акселерометра с ортогональными осями чувствительности, устройства преобразования сигналов магнитометров, устройства согласования сигналов акселерометров, аналого-цифровые преобразователи, цифровой модуль вычисления курса, устройство индикации курса и устройство электропитания, отличающийся тем, что он дополнительно содержит цифровой модуль расчета коэффициентов девиационных поправок и цифровой модуль контроля полной циркуляции, выход которого соединен с управляющим входом цифрового модуля расчета коэффициентов девиационных поправок, информационные входы цифрового модуля расчета коэффициентов девиационных поправок через аналого-цифровой преобразователь соединены с выходами магнитометров, а информационный выход цифрового модуля расчета коэффициентов девиационных поправок соединен со входом цифрового модуля вычисления курса, выход которого соединен с устройством индикации курса и со входом цифрового модуля контроля полной циркуляции.
| Электронный магнитный компас | 1982 |
|
SU1041969A1 |
| Цифровой компас | 1988 |
|
SU1515050A1 |
| БЕЗМАЯТНИКОВЫЙ МАГНИТНЫЙ КОМПАС | 1979 |
|
SU790917A1 |
| US 6070333 А, 06.06.2000 | |||
| СН 683128 А5, 14.01.1991. | |||

