Изобретение относится к области навигационного приборостроения и может быть использовано в стрелочных дистанционных магнитных компасах с электронно-цифровыми передачами информации о курсе, содержащими вычислитель, для обеспечения автономного автоматизированного учета полукруговой девиации компаса и ее изменений, а также ее автономного уничтожения вручную или автоматически, в процессе плавания судна.
Известны стрелочные дистанционные магнитные компасы, содержащие корпус, заполненный демпфирующей жидкостью, магнитный чувствительный элемент (МЧЭ), установленный на опоре, индукционный преобразователь (ИП), размещенный в магнитном поле магнитного чувствительного элемента, девиационный прибор, содержащий компенсатор полукруговой девиации компаса, и электромеханическую дистанционную передачу, например, описанные в книге "Магнитные компасы", В.П.Кожухов, В.В.Воронов, В.В.Григорьев, М., Транспорт, 1981 г., стр.173-180, компас "Сектор" и в "Техническом описании и инструкции по эксплуатации КБО.115.097 ТО "Магнитный компас KM 145-C4 (компас изготавливался ОАО "Штурманские приборы").
Основные недостатки технического решения, использованного в компасе "Сектор", вызваны прежде всего взаимным размещением МЧЭ, ИП и компенсатора полукруговой девиации (в составе девиационного прибора):
- размещением компенсатора полукруговой девиации под ИП (размещенным в грузе котелка) в нижней части нактоуза компаса. Указанное размещение компенсатора полукруговой девиации возможно при значительной высоте нактоуза, обеспечивающей необходимое удаление магнитов компенсатора полукруговой девиации от МЧЭ и ИП с целью обеспечения в зонах их размещения относительной однородности магнитного поля, создаваемого магнитами компенсатора полукруговой девиации. Необходимость удаления компенсатора полукруговой девиации от ИП приводит к увеличению габаритных размеров и массы магнитов и самого девиационного прибора, а также нактоуза компаса.
Вместе с тем погрешность информации о курсе, выработанная дистанционной передачей компаса, обусловленная практически имеющейся неоднородностью магнитного поля в месте размещения МЧЭ и ИП, из-за несимметричного размещения компенсатора относительно МЧЭ и ИП, может достигать единиц градусов.
Другими недостатками компаса "Сектор" являются:
- использование ИП, построенного на трех линейных феррозондах, имеющего значительную инструментальную погрешность ±2,5° (см. книгу "Магнитные компасы" стр.180 и книгу "Судовые индукционные и гиромагнитные компасы, стрелочные магнитные компасы с индукционными датчиками", Казакова Г.Ф., Кардашинский-Брауде Л.А., Фомкин Я.М., ЦНИИ "Румб", 1991 г. стр.23-25);
- использование электромеханической дистанционной передачи информации о курсе.
Перечисленные недостатки компаса "Сектор" исключают возможность использования автоматизированного учета полукруговой девиации и ее изменений в процессе плавания судна из-за размещения МЧЭ и ИП на расстоянии, не соответствующем строго регламентированному математической зависимостью ряда параметров, в том числе параметров МЧЭ и ИП, и отсутствия в составе компаса цифрового вычислителя.
Основные недостатки технического решения, использованного в компасе KM 145-C4, обусловлены также прежде всего взаимным размещением МЧЭ, ИП и компенсатора полукруговой девиации (в составе девиационного прибора), аналогичным компасу "Сектор".
Основными недостатками компаса являются:
- размещение компенсатора полукруговой девиации в составе девиационного прибора под ИП (размещенным в грузе котелка) в нижней части нактоуза компаса, несимметрично относительно МЧЭ и ИП, что допустимо только при значительной высоте нактоуза компаса и удалении компенсатора полукруговой девиации от МЧЭ и ИП для обеспечения относительной однородности магнитного поля постоянных магнитов компенсатора в зонах размещения МЧЭ и ИП. Необходимость удаления компенсатора полукруговой девиации от ИП приводит к увеличению габаритных размеров и массы магнитов и самого девиационного прибора, а также нактоуза компаса;
- использование электромеханической дистанционной передачи информации о курсе.
Достоинством компаса является использование в качестве ИП двухкомпонентного индукционного чувствительного элемента, построенного на двухкомпонентном кольцевом феррозонде (с кольцевым сердечником). Инструментальная погрешность преобразования курса кольцевого феррозонда не превышает долей градуса (см. книгу "Судовые индукционные и гиромагнитные компасы, стрелочные магнитные компасы с индукционными датчиками", стр.24-25).
Указанные недостатки компаса КМ 145-C4 исключают возможность использования автоматизированного учета полукруговой девиации компаса и ее изменений в процессе плавания судна в связи с невыполнением строго регламентированного математической зависимостью ряда параметров взаимного расположения МЧЭ и ИП и отсутствием в составе компаса вычислительного устройства.
Известен также магнитный компас, описанный в патенте РФ №2104489 (заявка №94043729/28 (044193) от 14.12.94 г.).
Компас содержит корпус, заполненный демпфирующей жидкостью, магнитный чувствительный элемент (МЧЭ), установленный на опоре и содержащий кольцевой магнит. На боковой поверхности корпуса снаружи закреплена съемная обойма с индукционным преобразователем (ИП).
ИП содержит два феррозонда, размещенных ортогонально, каждый из которых содержит, например, кольцевой сердечник. Плоскости сердечников лежат в двух ортогональных вертикальных плоскостях, параллельных плоскостям, направленным по касательным к боковой поверхности корпуса.
Основной недостаток рассмотренного компаса по патенту РФ №2104489 состоит в следующем:
при наличии в составе компаса компенсатора электромагнитной девиации, конструктивно выполняемого в виде системы соленоидов (см. книгу "Магнитные компасы", стр.121-126), но в отличие от описанного в книге варианта его расположения, размещаемого в современных компасах так, что центр МЧЭ совпадает с центром соленоидов (см. книгу "Современные судовые магнитные компасы", Л.А.Кардашинский-Брауде, г.Санкт-Петербург, Государственный научный центр РФ - ЦНИИ "Электроприбор", 1999 г., стр.115-119) будет иметь место значительная неоднородность магнитного поля, создаваемого компенсатором электромагнитной девиации в месте расположения МЧЭ и феррозондов ИП, обусловленная их несимметричным относительно компенсатора размещением, что может вызвать недопустимые погрешности преобразования курса ИП.
Наиболее близким к предлагаемому изобретению по технической сущности является дистанционный магнитный компас КМ 145-П2, описанный в "Техническом описании и инструкции по эксплуатации КБ 1.150.143 ТО, 1982 г. (компас серийно изготавливается ОАО "Штурманские приборы") (прототип).
Компас содержит курсовой преобразователь - герметичный корпус, заполненный демпфирующей (компасной) жидкостью; стрелочный магнитный чувствительный элемент (МЧЭ) с постоянными магнитами в виде 6 стрелок, установленный на опорном устройстве - шпильке; индукционный преобразователь (ИП) - двухкомпонентный первичный преобразователь, построенный на кольцевом феррозонде, размещенном в магнитном поле магнитного чувствительного элемента и конструктивно закрепленном на грузе курсового преобразователя; компенсатор полукруговой девиации, выполненный в виде двух конструктивных узлов, содержащих постоянные магниты: продольные и поперечные; компенсатор электромагнитной девиации, выполненный в виде двух бескаркасных катушек, расположенных перпендикулярно продольной плоскости прибора, двух бескаркасных катушек, расположенных параллельно продольной плоскости прибора, и катушки, ось которой направлена вертикально.
Компенсаторы полукруговой и электромагнитной девиации размещены в верхней части нактоуза компаса симметрично относительно МЧЭ и ИП.
Компас содержит электромеханическую дистанционную передачу.
Основным недостатком компаса КМ 145-П2 (прототипа) является размещение МЧЭ и ИП на расстоянии, не соответствующем строго регламентированному математической зависимостью ряда параметров (в том числе параметров МЧЭ, ИП), что не обеспечивает условия, необходимые для автоматизированного учета полукруговой девиации и ее изменений.
Другим недостатком компаса (прототипа) является использование электромеханической дистанционной передачи, не содержащей вычислитель, что также не обеспечивает автоматизированный учет полукруговой девиации и ее изменений.
Основной задачей, на решение которой направлено предлагаемое изобретение, является улучшение эксплуатационных характеристик компаса за счет использования в стрелочных дистанционных магнитных компасах с электронно-цифровыми передачами информации о курсе, содержащими вычислитель, автоматизированного учета полукруговой девиации компаса и ее изменений, а также ее автономного уничтожения вручную или автоматически, в процессе плавания судна.
Для решения указанной задачи в магнитном компасе, содержащем корпус, заполненный демпфирующей жидкостью, магнитный чувствительный элемент с магнитной системой, двухкомпонентный индукционный преобразователь, размещенный в магнитном поле магнитного чувствительного элемента, соосно с ним, и компенсатор полукруговой девиации, размещенный симметрично относительно магнитного чувствительного элемента и индукционного преобразователя, расстояние между центром пересечения осей симметрии магнитной системы магнитного чувствительного элемента и центром пересечения осей сигнальных обмоток индукционного преобразователя определяется формулой

где R - расстояние между центром пересечения осей симметрии магнитной системы магнитного чувствительного элемента и центром пересечения осей сигнальных обмоток индукционного преобразователя;
 - относительная погрешность измерения и учета полукруговой девиации δ компаса;
- относительная погрешность измерения и учета полукруговой девиации δ компаса;
 - относительная погрешность преобразования индукционным преобразователем компоненты горизонтальной составляющей напряженности магнитного поля Земли, судна и магнитного чувствительного элемента (Нх или Ну) в электрический сигнал (соответственно Ux или Uy);
- относительная погрешность преобразования индукционным преобразователем компоненты горизонтальной составляющей напряженности магнитного поля Земли, судна и магнитного чувствительного элемента (Нх или Ну) в электрический сигнал (соответственно Ux или Uy);
М - магнитный момент магнитной системы магнитного чувствительного элемента;
ΔНмчэ - погрешность измерения горизонтальной составляющей напряженности или индукции магнитного поля магнитной системы в области расположения индукционного преобразователя;
θ - угол между осью, совпадающей с направлением магнитной оси магнитной системы магнитного чувствительного элемента, и направлением оси, соединяющей центры пересечения осей симметрии магнитной системы и осей сигнальных обмоток индукционного преобразователя.
Предлагаемый компас представлен на фиг.1-5.
На фиг.1 изображен общий вид магнитного компаса в разрезе.
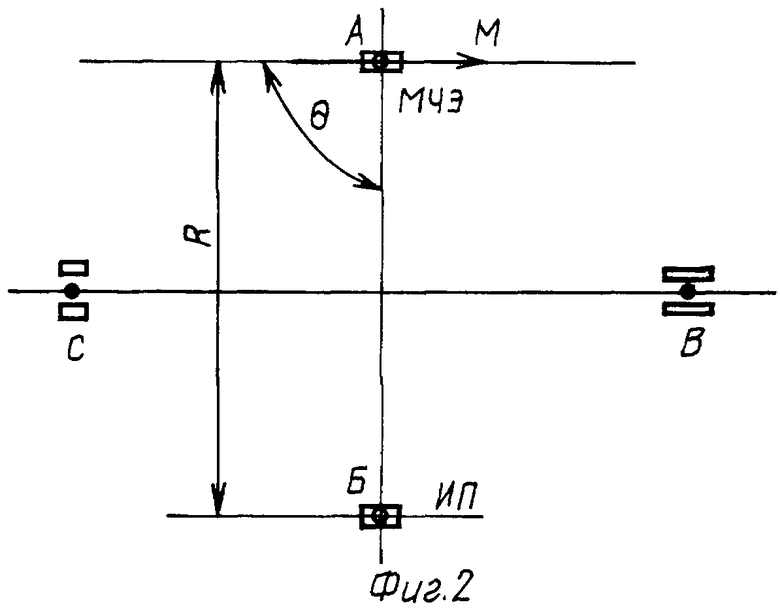
На фиг.2 представлена схема расположения основных элементов компаса.
На фиг.3 представлена векторная диаграмма магнитных полей в области ИП на компасном курсе 0°.
На фиг.4 представлена векторная диаграмма магнитных полей в области ИП на компасном курсе 180°.
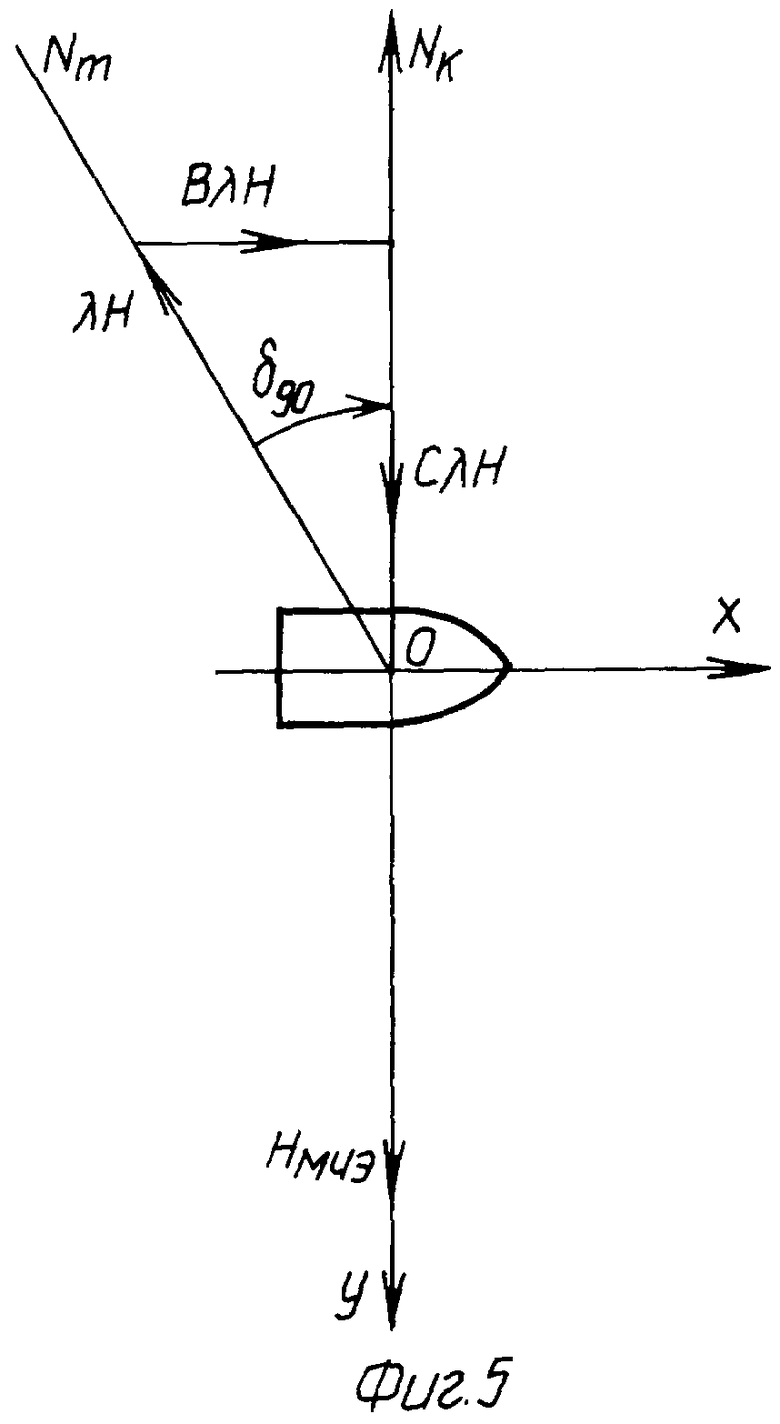
На фиг.5 представлена векторная диаграмма магнитных полей в области ИП на компасном курсе 90°.
На фиг.6 представлена векторная диаграмма магнитных полей в области ИП на компасном курсе 270°.
Предлагаемый магнитный компас содержит (см. фиг.1) корпус 1, заполненный демпфирующей жидкостью 2. Внутри корпуса на опорном устройстве 3 размещен магнитный чувствительный элемент 4, содержащий магнитную систему в виде кольцевого магнита 5. На грузе 6, обеспечивающем устойчивое горизонтальное положение корпуса 1, соосно с магнитным чувствительным элементом 4, размещен двухкомпонентный индукционный преобразователь 7, выполненный, например, на двухкомпонентном кольцевом феррозонде с сердечником кольцевой формы или на двух ортогональных однокомпонентных феррозондах.
В верхней части компаса размещен компенсатор полукруговой девиации, состоящий из двух наборов постоянных магнитов продольных 8 и 9 и поперечных 10 и 11, размещенных симметрично относительно магнитного чувствительного элемента 4 и двухкомпонентного индукционного преобразователя 7 и создающих в зоне размещения магнитного чувствительного элемента 4 и индукционного преобразователя 7 равные магнитные поля.
Магниты 8 и 9 лежат в плоскости, перпендикулярной продольной плоскости прибора. Магниты 10 и 11 лежат в плоскости, параллельной продольной плоскости прибора.
Расстояние R (см. фиг.2) между центром А пересечения осей симметрии магнитной системы магнитного чувствительного элемента 4 и центром Б пересечения осей сигнальных обмоток индукционного преобразователя 7 регламентировано и определяется формулой

где  - относительная погрешность измерения и учета полукруговой девиации δ компаса;
- относительная погрешность измерения и учета полукруговой девиации δ компаса;
 - относительная погрешность преобразования индукционным преобразователем компоненты горизонтальной составляющей напряженности магнитного поля Земли, судна и магнитного чувствительного элемента (Нх или Ну) в электрический сигнал (соответственно Ux или Uy);
- относительная погрешность преобразования индукционным преобразователем компоненты горизонтальной составляющей напряженности магнитного поля Земли, судна и магнитного чувствительного элемента (Нх или Ну) в электрический сигнал (соответственно Ux или Uy);
М - магнитный момент магнитной системы магнитного чувствительного элемента;
ΔНмчэ - погрешность измерения горизонтальной составляющей напряженности или индукции магнитного поля магнитной системы в области расположения индукционного преобразователя;
θ - угол между осью, совпадающей с направлением магнитной оси магнитной системы магнитного чувствительного элемента, и направлением оси, соединяющей центры пересечения осей сигнальных обмоток индукционного преобразователя.
На фиг.2 обозначены также М - магнитный момент магнитной системы магнитного чувствительного элемента МЧЭ, ИП - индукционный преобразователь, В - компенсатор продольной составляющей магнитного поля ВλH, вызывающей полукруговую девиацию, С - компенсатор поперечной составляющей магнитного поля СλH, вызывающей полукруговую девиацию. В выражениях ВλН и СλH λ - коэффициент экранирования магнитного поля Земли судовыми конструкциями, Н - индукция (напряженность) горизонтальной составляющей магнитного поля Земли в районе плавания, В и С - коэффициенты, определяющие значения полукруговой девиации.
На фиг.3, 4, 5, 6 представлены векторные диаграммы горизонтальных составляющих напряженностей магнитных полей Земли λН, магнитной системы магнитного чувствительного элемента Нмчэ, магнитных полей оборудования и корпуса судна в диаметральной плоскости ВλН и в плоскости шпангоутов СλH в зоне размещения индукционного преобразователя на различных компасных курсах: 0° (фиг.3); 180° (фиг.4); 90° (фиг.5) и 270° (фиг.6).
На фиг.3, 4, 5, 6 обозначены: Nm - магнитный меридиан; Nк - ось магнитной системы магнитного чувствительного элемента; δ0; δ180; δ90; δ270 - полукруговая девиация, соответственно, на компасных курсах 00, 1800, 900, 2700; ХОУ - судовая система координат.
Предлагаемое устройство работает следующим образом.
На индукционный преобразователь (ИП) 7 (фиг.1) компаса, установленного на судне, воздействует сумма горизонтальных составляющих напряженностей перечисленных ниже магнитных полей:
- Земли λH;
- магнитной системы 5 магнитного чувствительного элемента (МЧЭ) 4 Нмчэ;
магнитных полей корпуса и оборудования судна, вызывающих полукруговую девиацию компаса, в диаметральной плоскости судна ВλH и в плоскости шпангоутов СХН.
При этом на ортогональных сигнальных обмотках индукционного преобразователя 7 индуктируются электрические сигналы Ux и Uy, соответствующие значениям компасных курсов, амплитуды которых пропорциональны сумме воздействующих составляющих магнитного поля.
Вследствие относительно малого расстояния между МЧЭ и ИП по сравнению с размерами судна судовые поля, вызывающие девиацию магнитного компаса и характеризующиеся горизонтальными составляющими ВλН и СλН, в зонах размещения МЧЭ и ИП однородны, т.е. имеют равные модули и направлены параллельно.
Для получения значения магнитного курса судна необходимо исключить из показаний компаса полукруговую девиацию

где МК - магнитный курс,
КК - компасный курс,
δ - полукруговая девиация.
Для этого используется компенсатор полукруговой девиации. С помощью компенсатора при проведении девиационных работ создаются горизонтальные составляющие напряженности магнитного поля, равные по модулю, но направленные встречно составляющим ВλН и СλН и компенсирующие их в областях размещения МЧЭ и ИП.
При рациональной конструкции компенсатора и его симметричном размещении относительно МЧЭ и ИП компенсация составляющих ВλН и СλH в зонах размещения МЧЭ и ИП выполняется с высокой степенью точности. При этом амплитуды сигналов ИП Ux и Uy также соответственно изменятся за счет исключения воздействия ВλН и СλH.
В процессе плавания судна вследствие воздействия на корпус судна, например, механических факторов, вызывающих изменение его намагниченности, или по целому ряду других причин возникает полукруговая девиация, которая является неучтенной погрешностью компаса. Соответственно изменяются и сигналы ИП Ux и Uy.
Эта девиация определяется для аналогов и прототипа путем сопоставления их показаний с другими курсоуказателями или внешними ориентирами и учитывается путем введения вручную соответствующей поправки. При этом для выполнения указанных операций требуется выделение специального судового времени, специального места проведения работ, выполнения судном не менее трех полных циркуляций.
Предлагаемый магнитный компас, используемый совместно с электронно-цифровой дистанционной передачей информации о курсе, содержащей вычислитель, обеспечивает автономное определение полукруговой девиации без какой-либо внешней по отношению к компасу информации о курсе за время выполнения всего одной полной циркуляции судна. Полученная информация о полукруговой девиации может быть учтена в показаниях компаса и использована для получения информации о магнитном и истинном курсах без проведения дополнительных работ с компасом.
При изменении полукруговой девиации соответственно изменятся и сигналы ИП Ux и Uy, тем самым несущие информацию, обеспечивающую вычисление девиации. При этом сигналы Ux и Uy определяются следующими зависимостями:
на компасном курсе 0° (см. фиг.3)

где n - коэффициент преобразования сигнальной обмотки ИП;
на компасном курсе 180° (см.фиг.4)

При этом значение девиации δ1 определяется зависимостью


что справедливо при значениях δ1, равных единицам градусов.
Соответственно на компасном курсе 90° (см.фиг.5)

на компасном курсе 270° (см.фиг.6)
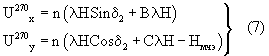
Значения девиации δ2 определяется зависимостью

что справедливо при значениях δ2, равных единицам градусов.
Значение магнитного курса определяется зависимостью

где МК - магнитный курс;
КК - компасный курс;
δ1 и δ2 - значения девиации, определенных по формулам (5) и (8), соответственно.
Таким образом, предлагаемое устройство обеспечивает получение электрических сигналов, содержащих информацию о девиации, которые могут быть использованы для вычисления значений девиации δ1 и δ2 и их приращений и затем для их компенсации или учета в текущих значениях магнитных курсов. При этом процесс вычислений и учета девиации легко может быть автоматизирован путем использования вычислителя.
Погрешность определения и учета девиации зависит от расположения МЧЭ и ИП относительно друг друга и определяется расстоянием между ними. Минимизация погрешностей определения девиации и ее учета обеспечивается при строгом выполнении расстояния между МЧЭ и ИП, определяемом формулой (1). Из формулы (1) следует, что при нарушении соотношения параметров в сторону увеличения расстояния R между МЧЭ и ИП возрастает относительная погрешность Δδ/δ измерения и, следовательно, учета полукруговой девиации, поскольку Δδ/δ входит в числитель подкоренного выражения формулы (1). При уменьшении расстояния R возрастает погрешность измерения ΔНмчэ, поскольку ΔНмчэ входит в знаменатель подкоренного выражения формулы (1).
Увеличение ΔНмчэ также приводит к увеличению относительной погрешности Δδ/δ в соответствии с формулами (3), (4), (6), (7).
Оптимальным, при заданных значениях Δδ/δ, ΔU/U, М, R, θ, ΔНмчэ является значение R, соответствующее формуле (1).
Предлагаемое изобретение обеспечивает:
1. Возможность определения полукруговой девиации магнитного компаса, снабженного электронно-цифровой дистанционной передачей информации о курсе, содержащей вычислитель, автономно без какой-либо внешней по отношению к компасу информации о курсе и ее компенсации.
2. Возможность автономного уничтожения девиации или ее приращений вручную или автоматически, а также автоматизацию процесса учета полукруговой девиации без выполнения дополнительных работ.
3. Определение и учет полукруговой девиации компаса в процессе плавания судна без использования специального полигона, что экономит ходовое время и, тем самым, материальные затраты.
4. Определение и учет полукруговой девиации за одну циркуляцию судна. Для аналогов и прототипа необходимо выполнение не менее трех циркуляций. Это экономит ходовое время судна и, следовательно, снижает материальные затраты.
5. Определение и учет полукруговой девиации без выполнения расчетов оператором-штурманом, что имеет место для аналогов и прототипа.
Таким образом, исключаются возможные субъективные оценки оператора-штурмана и ошибки расчетов, что уменьшает погрешности судовождения.
Теоретическое приложение к изобретению “Магнитный компас”
Индукционный преобразователь (ИИ) дистанционного стрелочного магнитного компаса устанавливается на котелок компаса, горизонтируется вместе с котелком, с применением карданова подвеса. Оси чувствительности (диаграммы направленности) ИП совпадают с диаметральной плоскостью (осью X) и плоскостью шпангоутов (осью Y) судна. На ИП в условиях судна воздействуют горизонтальные составляющие индукции (напряженности) следующих источников магнитных полей:
- магнитного поля Земли λН, где λ - коэффициент экранирования магнитного поля Земли судовыми конструкциями, Н - индукция (напряженность) горизонтальной составляющей магнитного поля Земли в районе плавания;
- магнитного поля, создаваемого системой магнитов - стрелок или монолитным магнитом чувствительного элемента (МЧЭ) компаса Нмчэ;
- продольная и поперечная составляющие полупостоянного магнитного поля судна ВλН и СλН, где В и С - коэффициенты, определяющие значения полукруговой девиации, имеющей одинаковые знаки в пределах изменений курсов судна, равных 180°.
Другие источники судовых полей - поля индуктивной намагниченности судна, создающие четвертную девиацию и поля обмоток размагничивания, создающих как полукруговую, так и четвертную девиацию, - не рассматриваются, так как эти поля стабильны и после их компенсации не влияют на показания компаса.
Полупостоянное поле судна изменяется под влиянием изменяющихся механических напряжений в судовых конструкциях, что вызывает неконтролируемые между процессами уничтожения девиации изменения сил ВλН и СλН и, соответственно, полукруговой девиации. Целью настоящего приложения является получение формулы, выражающей зависимость расстояния R между МЧЭ и ИП от относительных погрешностей учета полукруговой девиации или ее изменений Δδ/δ, где δ - девиация погрешности измерения сигналов ИП ΔН/НМЧЭ, погрешности измерения ΔНМЧЭ, выполняемого до установки компаса на судно в стендовых условиях, магнитного момента МЧЭ М и угла θ между горизонтальной плоскостью и направлением на центр ИП.
Векторная диаграмма полей, действующих на ИП, на компасном курсе судна (т.е. при курсе, отсчитанном по шкале МЧЭ компаса) θ0 имеет вид, изображенный на рисунке 1.

Проекции векторов на оси Х и Y, совпадающие с осями ИП, и вызываемые ими сигналы ИП U

Векторная диаграмма на компасном курсе 180° изображена на рисунке 2.

Обозначения на рисунке 2 совпадают с обозначениями на рисунке 1.
Из диаграммы следует, что на компасном курсе 180°

Из диаграмм следует также, что при ВλН<<Нмчэ
δ0=-δ180=|δ1|.
Поэтому уравнения (1) и (2) могут быть записаны как

Из уравнений (3) следует, что

Откуда 

Из (6)

Из векторных диаграмм, аналогичным вышеприведенным, для компасных курсов 90 и 270° можно получить выражение для девиации δ2 на этих курсах

со структурой, аналогичной (7).
Относительная погрешность измерения и учета девиации Δδ/δ по (7) и (8) имеет вид

где ΔU, U - погрешность измерения напряжений и напряжения сигналов ИИ;
ΔНмчэ, Нмчэ - погрешность измерения и преобразования индукции (напряженности) поля МЧЭ в области ИП и само поле МЧЭ.
В соответствии с [1] напряженность поля Нмчэ можно выразить как

где М - магнитный момент МЧЭ;
R - расстояние между МЧЭ и ИП;
θ - угол между горизонтальной плоскостью и направлением на центр ИП.
Из (9) и (10) следует, что

Из (11) R равно
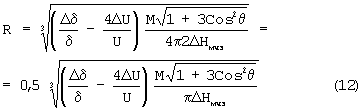
Формула (12) приведена в формуле заявки на изобретение.
Литература
1. Кожухов В.П., Воронов В.В., Григорьев В.В. Девиация магнитного компаса. П. Морской транспорт, 1960 г., стр.251.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2104489C1 |
| БЕЗЫНДУКЦИОННЫЙ СДВОЕННЫЙ ШИРОТНЫЙ КОМПЕНСАТОР | 2001 |
|
RU2239786C2 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
| Способ измерения магнитного курса судна в высоких широтах | 2021 |
|
RU2763685C1 |
| Способ измерения магнитного курса судна с использованием системы коррекции | 2023 |
|
RU2804444C1 |



Изобретение относится к области навигационного приборостроения и может быть использовано в стрелочных дистанционных магнитных компасах с электронно-цифровыми передачами информации о курсе. Технический результат: обеспечение автономного автоматизированного учета полукруговой девиации компаса и ее изменений, а также возможность ее автономного уничтожения вручную или автоматически в процессе плавания судна. Сущность: магнитный компас содержит корпус, заполненный демпфирующей жидкостью, магнитный чувствительный элемент с магнитной системой, двухкомпонентный индукционный преобразователь, размещенный в магнитном поле магнитного чувствительного элемента, соосно с ним, и компенсатор полукруговой девиации, размещенный симметрично относительно магнитного чувствительного элемента и индукционного преобразователя. Расстояние между центром пересечения осей симметрии магнитной системы магнитного чувствительного элемента и центром пересечения осей сигнальных обмоток индукционного преобразователя определяется из математической зависимости от параметров магнитного чувствительного элемента, индукционного преобразователя и др. 6 ил.

Магнитный компас, содержащий корпус, заполненный демпфирующей жидкостью, магнитный чувствительный элемент с магнитной системой, двухкомпонентный индукционный преобразователь, размещенный в магнитном поле магнитного чувствительного элемента соосно с ним, и компенсатор полукруговой девиации, размещенный симметрично относительно магнитного чувствительного элемента и индукционного преобразователя, отличающийся тем, что расстояние между центром пересечения осей симметрии магнитной системы магнитного чувствительного элемента и центром пересечения осей сигнальных обмоток индукционного преобразователя определяется формулой

где R - расстояние между центром пересечения осей симметрии магнитной системы магнитного чувствительного элемента и центром пересечения осей сигнальных обмоток индукционного преобразователя;
Δδ/δ - относительная погрешность измерения и учета полукруговой девиации δ компаса;
ΔU/U - относительная погрешность преобразования индукционным преобразователем компоненты горизонтальной составляющей напряженности магнитного поля Земли, судна и магнитного чувствительного элемента (Нх или Ну) в электрический сигнал (соответственно Uх или Uу);
М - магнитный момент магнитной системы магнитного чувствительного элемента;
ΔНмчэ - погрешность измерения горизонтальной составляющей напряженности или индукции магнитного поля магнитной системы в области расположения индукционного преобразователя;
θ - угол между осью, совпадающей с направлением магнитной оси магнитной системы, магнитного чувствительного элемента и направлением оси, соединяющей центры пересечения осей симметрии магнитной системы и осей сигнальных обмоток индукционного преобразователя.
| МАГНИТНЫЙ КОМПАС | 1994 |
|
RU2104489C1 |
| ВИЗУАЛЬНЫЙ МАГНИТНЫЙ КОМПАС-ДАТЧИК | 1995 |
|
RU2098759C1 |
| US 3530704 А, 29.09.1970 | |||
| US 4656751 А, 14.04.1987. | |||
