Изобретение относится к навигационному приборостроению и может быть использовано для построения навигационных автономных магнитных компасов, предназначенных для коррекции накапливающихся ошибок гироскопов, используемых при навигации самолетов и кораблей.
Известны магнитные компасы, содержащие маятниковый датчик с двумя ортогонально ориентированными феррозондами, каждый из которых через соответствующий преобразователь соединен со своим входом указателя курса, представляющего собой, например, координатный построитель курса типа вращающегося трансформатора (а.с. №287327, G01C 17/26, 1970, "Индукционный компас") и корректор, выполненный в виде сдвоенного потенциометра, входы каждой секции которого соединены с выходами соответствующих им преобразователей, а выходы подключены перекрестно к обмоткам, размещенным на датчиках, причем выход секции одного потенциометра подключен к прямому входу обмотки, а другого - к инверсному входу обмотки.
В данном устройстве осуществляется электрическая полуавтоматическая коррекция магнитного склонения путем одновременной подачи с выходов корректора сигналов через перекрестные связи в обмотки датчиков.
Таким образом, в процессе коррекции показания угла указателя курса изменяются на величину корректирующей поправки противоположного знака углу склонения.
Недостатком данного устройства является отсутствие автоматического контроля исправности магнитного компаса, что является особенно важным в автономных навигационных дистанционных компасах.
Известны также навигационные магнитометры (а.с. №970176, 1982, G01R 33/02, по заявке №2999939 от 3.11.80), предназначенные для измерения параметров магнитного поля Земли (МПЗ) и в том числе для определения магнитного курса, содержащие измерительные каналы с последовательным соединением феррозондов и усилительно-преобразовательных блоков, выходы которых подключены к соответствующим входам цифрового вычислителя, причем каждый канал содержит управляемый с выходов цифрового вычислителя формирователь тестового сигнала.
В данных устройствах с помощью измерительных каналов осуществляются измерение и выдача в цифровой вычислитель компонент вектора индукции МПЗ. В последнем осуществляется вычисление параметров МПЗ, в том числе и магнитного курса объекта. С помощью формирователей тестовых сигналов осуществляется подача тестовых токов в обмотки феррозондом и тем самым осуществляется тестовый контроль исправности измерительных каналов.
Недостатками подобных устройств являются сложность, обусловленная необходимостью дополнительных аппаратных затрат на реализацию управляемого формирователя тестов, и недостаточная глубина контроля магнитного компаса, обусловленная отсутствием контроля формирователя курса.
Наиболее близким по технической сущности к предлагаемому и выбранным в качестве прототипа является магнитный компас (Акиндеев Ю.А. и др. Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации. - М.: Машиностроение, 1989, с.10-12, 282, 288-290), содержащий маятниковый датчик с двумя ортогонально ориентированными феррозондами, каждый из которых через соответствующий усилительно преобразовательный блок соединен со своим входом цифрового указателя курса, выполненного на основе цифрового вычислителя.
Магнитный компас работает следующим образом.
Проекции горизонтальной составляющей вектора индукции МПЗ, действующие на феррозонды маятникового датчика, поступают на входы соответствующих усилительно-преобразовательных блоков, выделяются и преобразуются последними в коды, поступающие на цифровые входы цифрового вычислителя курса. В последнем по значениям кодовых эквивалентов определяется курс.
Недостатком данного магнитного компаса является отсутствие автономного автоматического контроля его исправности.
Техническим результатом, достигаемым при использовании предлагаемого технического решения, является обеспечение автономного автоматического контроля исправности при малых дополнительных аппаратных затратах.
Указанный результат достигается тем, что в магнитный компас, содержащий маятниковый датчик с двумя ортогонально ориентированными феррозондами, выходы которых через соответствующие усилительно-преобразовательные блоки соединены каждый со своим входом цифрового вычислителя, дополнительно введены две цепи последовательного соединения коммутатора и масштабного резистора, вход первой и второй цепей подключен соответственно к выходу первого и второго усилительно-преобразовательных блоков, выход первой и второй цепей подключен соответственно ко входу обмотки второго и первого феррозондов, при этом выход одной цепи подключен к прямому входу обмотки, а выход другой цепи - к инверсному входу обмотки, причем входы управления коммутаторов подключены к выходу цифрового вычислителя.
На чертеже показана структурная схема предлагаемого устройства.
Устройство содержит маятниковый датчик с двумя ортогонально ориентированными феррозондами 1, 2, выходы которых через соответствующие усилительно-преобразовательные блоки 3, 4 соединены со входами цифрового вычислителя 5, первую цепь последовательного соединения коммутатора 6 и масштабного резистора 8, вход которой подключен к выходу первого усилительного-преобразовательного блока 3, а выход - ко входу обмотки второго феррозонда 2, вторую цепь последовательного соединения коммутатора 7 и масштабного резистора 9, вход которой подключен к выходу второго усилительно-преобразовательного блока 4, а выход - ко входу обмотки первого феррозонда 1, причем выход одной цепи, например второй, подключен к прямому входу обмотки первого феррозонда 1, а выход другой цепи, в данном случае первой, подключен к инверсному входу обмотки второго феррозонда, причем входы управления коммутаторов 6, 7 подключены к выходу цифрового вычислителя 5.
Устройство работает в двух режимах: в основном или рабочем и в режиме контроля.
В рабочем режиме сигнал "Режим", подаваемый, например, в виде потенциала логического нуля, с выхода цифрового вычислителя 5 на входы управления коммутаторов 6, 7 с помощью последних размыкает цепи подачи токов через резисторы 8, 9 в обмотки феррозондов 1, 2. В этом случае осуществляется измерение проекций горизонтальной составляющей вектора индукции МПЗ, действующей на феррозонды 1, 2 маятникового датчика, проекции выделяются последними, а затем с помощью усилительно-преобразовательных блоков 3, 4 усиливаются на частоте второй гармоники напряжения возбуждения феррозондов и преобразуются в аналоговые (напряжения) или кодовые эквиваленты, подаваемые на входы цифрового вычислителя. Форма представления входных сигналов вычислителя зависит от реализации его входной части. В цифровом вычислителе 5 в рабочем режиме осуществляется формирование текущего значения магнитного курса Ψ путем вычисления арктангенса отношения измеренных компонент вектора индукции МПЗ (то есть отношения поперечной компоненты к продольной компоненте). При необходимости в вычислителе 5 осуществляется также индикация магнитного курса.
Режим контроля начинается с момента появления сигнала "Режим", например в виде потенциала логической единицы, замыкающего с помощью коммутаторов 6, 7 цепи подачи токов через масштабные резисторы 8, 9 соответственно в обмотки феррозондов 2, 1. В режиме контроля на выходе вычислителя 5 (цифрового указателя курса) формируется показание курсового угла Ψ', определяемое выражением
Ψ'=Ψ+Ψк
где Ψк - постоянное контрольное значение курсового угла, формируемое подачей токов в обмотки феррозондов 1, 2. Способ формирования дополнительного курсового угла (склонения) показан в вышепредставленном аналоге (а.с. №287327, G01С 17/26, 1970, "Индукционный компас"). Выбором прямого и инверсного подключения обмоток феррозондов 1, 2 и значений масштабных резисторов при условии их равенства, задаются соответственно знак и абсолютное значение тестовой величины Ψт, курсового угла в режиме контроля. По результатам измерений выходных величин усилительно-преобразовательных блоков 3, 4 осуществляется определение контрольной величины Ψк курсового угла путем вычисления в вычислителе 5 алгебраической разности результатов измерений в контрольном и рабочем режимах. Затем определяется в вычислителе 5 исправность магнитного компаса путем сравнения измеренной контрольной величины Ψк в режиме контроля и заданного тестового значения Ψт, хранимого в памяти вычислителя 5. Признаком исправности магнитного компаса является равенство Ψк=Ψт и наоборот, невыполнение указанного равенства характеризует состояние отказа устройства, вызванное отказом любого элемента схемы.
Таким образом, предлагаемое устройство обладает высокой глубиной автономного автоматического контроля исправности при малых дополнительных аппаратных затратах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| МАГНИТНЫЙ КОМПАС | 1997 |
|
RU2126524C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2015 |
|
RU2610938C1 |
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| Способ измерения магнитного курса подвижного объекта и устройство для его осуществления | 2017 |
|
RU2653599C1 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
Изобретение относится к области навигационного приборостроения. Сущность: устройство содержит маятниковый датчик с двумя ортогонально ориентированными феррозондами. Выходы феррозондов через соответствующие усилительно-преобразовательные блоки соединены каждый со входом цифрового вычислителя. Дополнительно в устройство введены две цепи последовательного соединения коммутатора и масштабного резистора. Вход первой и второй цепей подключен соответственно к выходу первого и второго усилительно-преобразовательных блоков. Выход первой и второй цепей подключен соответственно ко входу обмотки второго и первого феррозондов. При этом выход одной цепи подключен к прямому входу обмотки, а выход другой цепи - к инверсному входу обмотки. Причем выходы управления коммутаторов подключены к выходу цифрового вычислителя. Технический результат: повышение достоверности автономного автоматического контроля исправности. 1 ил.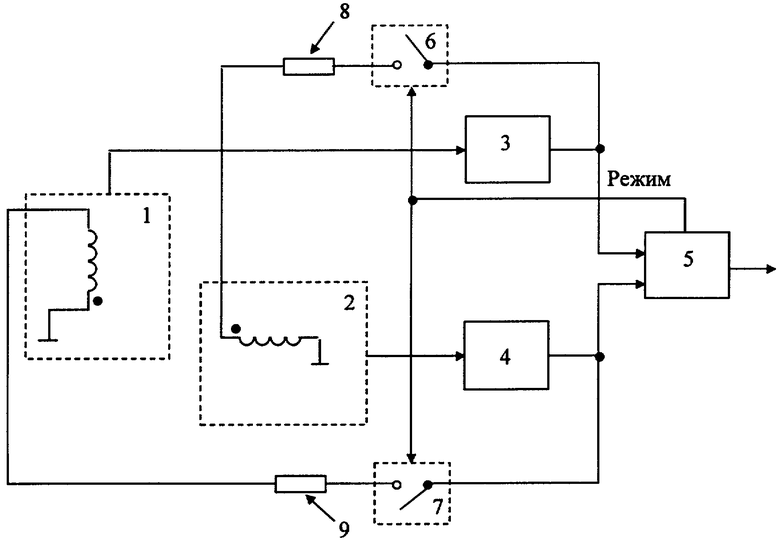
Магнитный компас, содержащий маятниковый датчик с двумя ортогонально-ориентированными феррозондами, выходы которых через соответствующие усилительно-преобразовательные блоки соединены каждый со своим входом цифрового вычислителя (указателя курса), отличающийся тем, что в него дополнительно введены две цепи последовательного соединения коммутатора и масштабного резистора, входы первой и второй цепей подключены соответственно к выходам первого и второго усилительно-преобразовательных блоков, выходы первой и второй цепей подключены соответственно ко входам обмотки второго и первого феррозондов, при этом выход одной цепи подключен к прямому входу обмотки, а выход другой цепи - к инверсному входу обмотки, причем входы управления коммутаторов подключены к выходу цифрового вычислителя.
| ИНДУКЦИОННЫЙ КОМПАС | 0 |
|
SU287327A1 |
| МАГНИТНЫЙ КОМПАС | 1997 |
|
RU2126524C1 |
| Магнитный компас | 1979 |
|
SU836521A1 |
| US 2001030537 A, 18.10.2001. | |||

