Изобретение относится к приборам для измерения расстояния, в частности расстояний, пройденных автомобилем, и может быть использовано преимущественно при геодезических измерениях на сухом несыпучем грунте.
Известно устройство [1] содержащее два преобразователя вращения колес, расположенных на одной оси автомобиля, связанных с блоками сравнения и сложения. Блок сравнения связан с пороговым устройством, которое, в свою очередь, связано с первым входом блока вычитания, второй вход которого связан с блоком сложения, а выход со счетчиком пути.
В работе прибор измеряет вращение передних колес независимо друг от друга с помощью преобразователей вращения колес, выходные сигналы которых поступают на блок сравнения (вычитания), где определяется разность во вращении колес, а затем на блок сложения. Различие во вращении колес при повороте не принимается в расчет благодаря наличию порогового устройства.
Недостатком данного устройства является сложность и сравнительно низкая точность определения расстояния, обусловленная тем, что устройство учитывает в лучшем случае лишь проскальзывание одного колеса относительно другого. В то же время они оба подвержены проскальзыванию, особенно на мягких грунтах. Кроме того, устройство не позволяет учитывать изменение дорожных условий, что приводит к значительным погрешностям.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для измерения расстояния, пройденного автомобилем [2] Устройство содержит закрепленные на переднем и заднем колесах автомобиля соответственно первый и второй преобразователи вращения колес. Каждый преобразователь вращения колес связан с общим генератором импульсов высокой частоты счетчика пути, выход которого связан с первым входом схемы сравнения, причем второй ее вход связан с программным выключателем, а выход с накопительным счетчиком, который связан с индикатором. Первый преобразователь вращения колес связан также со счетчиком отрезков пройденного пути. Второй преобразователь вращения колеса размещен на заднем колесе автомобиля и связан с первым входом счетчика импульсов блока сравнения, при этом второй вход счетчика импульсов связан с выходом счетчика отрезков пройденного пути, а выход счетчика импульсов с первым входом схемы сравнения этого блока. К второму входу схемы сравнения подключен программный переключатель. Выход схемы сравнения связан с сигнальным контрольным устройством.
Недостатками этого устройства являются его сложность, ограниченные функциональные возможности, что усложняет эксплуатацию прибора и снижает производительность. Так, при выполнении измерений оператору необходимо постоянно следить за дорожными условиями и сигнальным контрольным устройством для проведения коррекции (изменение длины единичного приращения пути). В интервалах между точками контроля накапливаются погрешности, обусловленные разностью установленного единичного приращения пути и фактического, полученного на контрольном сигнальном устройстве.
Технический результат изобретения учет изменения дорожных условий непосредственно в процессе работы устройства за счет компенсации изменения оборотов переднего колеса, вследствие чего достигается упрощение устройства и повышение его производительности.
Указанный результат достигается тем, что устройство для измерения расстояния, пройденного автомобилем, содержащее закрепленные на переднем и заднем колесах автомобиля датчики пути, соединенные последовательно программный переключатель, схему сравнения, накопительный счетчик и индикатор, а также генератор импульсов высокой частоты, связанный с вторым входом схемы сравнения, дополнительно содержит блок формирования счетных импульсов, входы которого соединены с датчиками пути, а выход с входом генератора импульсов высокой частоты, при этом количество датчиков пути, устанавливаемых на передних и задних колесах, выбирается из условия
 где kз и kп число датчиков, устанавливаемых соответственно на заднем и передних колесах;
где kз и kп число датчиков, устанавливаемых соответственно на заднем и передних колесах;
nз и nп число оборотов соответственно заднего и переднего колес автомобиля на эталонном базисе с мягким грунтом.
Блок формирования счетных импульсов содержит генератор синхроимпульсов, инвертор, а также первый и второй формирователи импульсов, выходы которых связаны со счетными входами первого и второго триггеров, при этом выходы триггеров связаны с первыми входами схем И, выходы которых соединены с входами первого и второго формирователей сбрасывающих импульсов и входами схемы ИЛИ, выход которой является выходом формирователя счетных импульсов, выходы формирователей сбрасывающих импульсов через линии задержки соединены с установленными входами первого и второго триггеров, выход генератора синхроимпульса соединен с вторым входом второй схемы И и через инвертор с вторым входом первой схемы И.
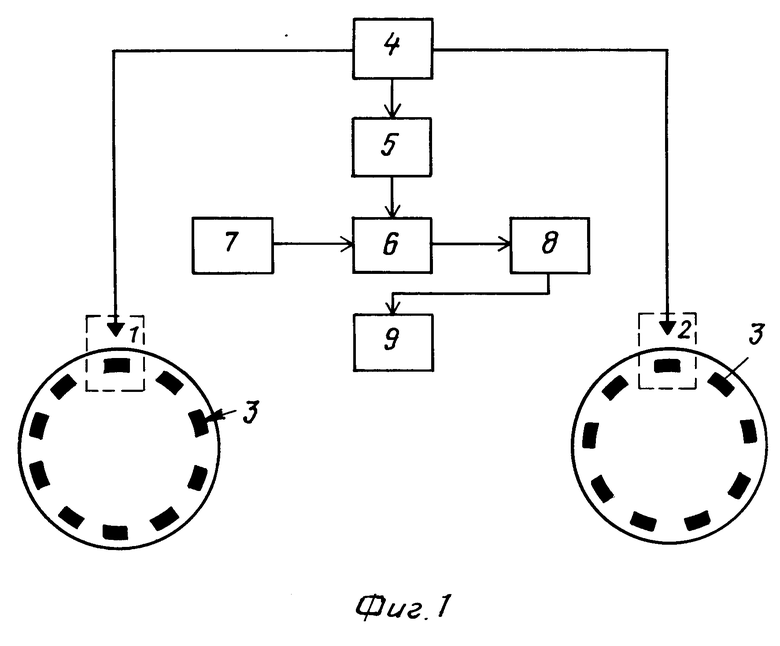
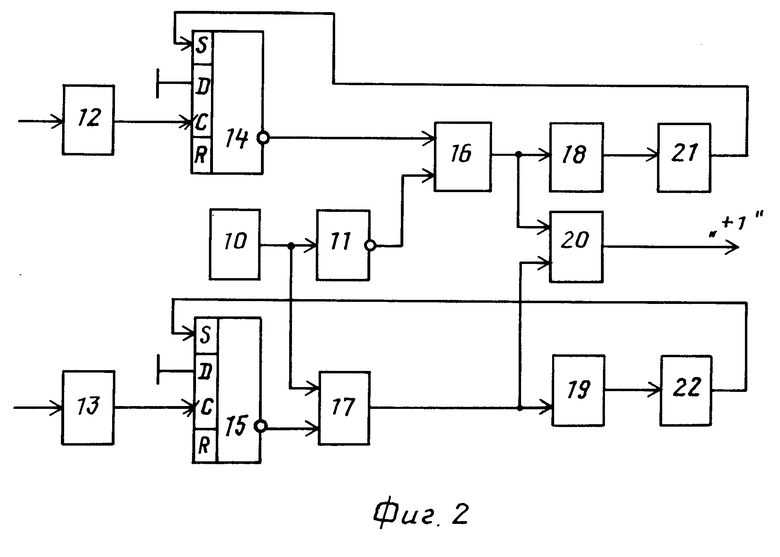
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2 схема блока формирования счетных импульсов.
Устройство содержит датчики 1 и 2 пути соответственно переднего и заднего колес автомобиля. Датчики 1 переднего колеса содержат Кп магнитных элементов 3, датчики 2 пути заднего колеса содержат Кз магнитных элементов 3. Датчики 1, 2 пути связаны с блоком 4 формирования счетных импульсов, выход которого соединен с генератором 5 импульсов высокой частоты. Выход генератора 5 соединен с первым входом схемы 6 сравнения, второй входы которой связан с программным переключателем 7, а выход с накопительным счетчиком 8, связанным с индикатором 9.
Блок 4 формирования счетных импульсов (фиг.2) содержит генератор 10 синхроимпульсов, связанный с инвертором 11, формирователи 12, 13 импульсов, связанные соответственно с триггерами 14, 15, выходы которых соединены с первыми входами схем И 16, 17. Вторые входы схем И 16, 17 соединены соответственно с выходом инвертора 11 и выходом генератора 10 синхроимпульсов. Выходы схем И 16, 17 соединены с входами формирователей 18, 19 сбрасывающих импульсов и схемы ИЛИ 20. Входы формирователей сбрасывающих импульсов 18, 19 через линии 21, 22 задержки соединены с S-входами триггеров 14, 15. Выход схемы ИЛИ 20 является выходом блока 4 формирования счетных импульсов.
Каждый из датчиков 1, 2 пути представляет собой магнитоуправляемый контакт (пара магнит-геркон). Число магнитов 3 на каждом из колес устанавливается в соответствии с расчетным значением.
Работа устройства для измерения расстояния, пройденного автомобилем, основана на следующем.
При движении автомобиля его колеса вращаются пропорционально пройденному пути, при этом передние колеса при уменьшении плотности грунта, скользят, т. е. делают меньшее число оборотов, чем на твердых грунтах. Это обусловлено тем, что переднее колесо на мягком грунте получает большее, чем на твердом сухом грунте сопротивление вращению, кроме того, на более мягком грунте уменьшается сцепление колес грунтом. Одновременное увеличение сопротивления вращению колес и уменьшение сцепления обуславливает увеличение радиуса качения переднего колеса (уменьшение угловой скорости) и соответственно увеличение числа оборотов (увеличение угловой скорости) заднего колеса. При измерении некоторого расстояния, переднее колесо, например, при уменьшении плотности грунта сделает nп n Δn обоpотов, а заднее nз= n + Δm оборотов. Очевидно, что если сложить обороты переднего и заднего колес nп + nз, то на любых грунтах изменение их суммы скомпенсировано, но не полностью, это связано с некоторой разностью изменения скоростей вращения (по абсолютной величине) переднего и заднего колес.
Таким образом, последовательно суммируя отрезки пути, пройденные передним и задним колесами, учитывая их изменения с различными знаками (т.е. при увеличении скорости вращения переднего уменьшается скорость вращения заднего и наоборот) при изменении плотности грунта, можно компенсировать изменение числа оборотов переднего колеса числом оборотов заднего колеса. Практически именения скорости вращения переднего и заднего колес по абсолютной величине не равны.
Для учета этого в предлагаемом техническом решении на переднем и заднем колесах установлено различное количество датчиков таким образом, что их отношение обратно пропорционально отношению числа оборотов колес. Расстояние в соответствии с изложенным определяется по формуле
S l(nпkп + nзkз), (1) где S измеренное расстояние;
l единичное приращение пути (часть длины окружности колеса).
Единичный отрезок пути определяется на эталонном участке по формуле
l  (2) где Sэт эталонное расстояние.
(2) где Sэт эталонное расстояние.
Работает устройство для измерения расстояния, пройденного автомобилем, следующим образом.
Предварительно для данного транспортного средства на эталонном базисе Sэт с мягким грунтом любым известным способом измеряют соотношение числа оборотов переднего и заднего колес nп, nз. К мягким грунтам следует относить грунты с коэффициентом сцепления не более 0,4 и коэффициентом сопротивления качению не более 0,2, что соответствует, например, грунтам типа стерни или пашни. Затем на колесах транспортного средства устанавливают датчики 1, 2 пути с таким числом магнитных элементов 3, что их отношение обратно пропорционально полученному отношению  Далее в программном пере- ключателе 7 устанавливают единичный отрезок пути в соответствии с выражением (2).
Далее в программном пере- ключателе 7 устанавливают единичный отрезок пути в соответствии с выражением (2).
Датчики 1 и 2 пути переднего и заднего колес пропорционально пройденному пути вырабатывают импульсы, каждый последующий из которых результат единичного приращения пути l. Эти импульсы поступают на блок 4 формирования счетных импульсов. Блок 4 работает следующим образом.
Импульсы с датчиков 1 и 2 пути переднего и заднего колес поступают на входы соответственно формирователей 12 и 13 коротких импульсов, которые запускают триггеры 14 и 15, с выхода которых импульсы прямоугольной формы поступают на входы схем И 16 и 17. Генератор 10 синхроимпульсов вырабатывает последовательность однополярных прямоугольных импульсов, частота fг следования которых значительно больше частоты следования импульсов, поступающих с датчиков 1, 2 колес. В общем виде частота fг может быть установлена в соответствии с выражением
fг≥ 10 +
+  где V максимальная скорость автомобиля, м/с;
где V максимальная скорость автомобиля, м/с;
lп периметр переднего колеса, м;
lз периметр заднего колеса, м.
Импульсы с генератора 10 синхроимпульсов поступают на входы схем И 16, 17, причем на схему И 16 через инвертор 11, т.е. в обратной полярности. Таким образом, через схемы И 16, 17 импульсы с датчиков 1, 2 колес проходят только с задержкой относительно друг друга. Поэтому ни один из импульсов не теряется, что могло бы произойти в случае их совпадения по времени.
Далее импульсы с выходов схем И 16, 17 поступают в формирователи 18, 19, с которых через линии 21, 22 задержки подаются на S-входы триггеров 14, 15 и сбрасывают их. Эти же импульсы поступают на входы схемы ИЛИ 20, где они смешиваются, после чего поступают на вход генератора 5 высокочастотных импульсов и запускают его. Когда число импульсов, выработанных генератором 5 станет равным значению, установленному на программном переключателе 7, схема 6 сравнения останавливает генератор 5. Число разрядов программного переключателя 7 выбирается (устанавливается) в зависимости от требуемой точности, например для обеспечения точности 0,1% четыре разряда. В результате формируется пачка высокочастотных импульсов. Накопительный счетчик 8 прибавляет к предыдущему значению число, равное единичному приращению пути l (число, установленное программным переключателем). Значение единичного приращения пути подается на индикаторное устройство 9. Оно в цифровом виде отображает пройденный путь.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕВЫШЕНИЯ МЕЖДУ ТОЧКАМИ МЕСТНОСТИ | 1988 |
|
RU1764400C |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Устройство для измерения расстояния,пройденного автомобилем | 1984 |
|
SU1303827A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ДОРОЖНЫМ ПОКРЫТИЕМ | 1999 |
|
RU2156333C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1984 |
|
RU1233666C |
| СПОСОБ МНОГОВОЛНОВОЙ СЕЙСМОРАЗВЕДКИ | 1990 |
|
SU1813297A3 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 1992 |
|
RU2045084C1 |
| УСТРОЙСТВО ФАЗОВОЙ АВТОПОДСТРОЙКИ ТАКТОВОЙ ЧАСТОТЫ АНАЛОГО-ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ В МНОГОКАНАЛЬНЫХ СИСТЕМАХ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2002 |
|
RU2207719C1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1990 |
|
RU2010257C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРЕВЫШЕНИЙ ТОЧЕК МЕСТНОСТИ | 1986 |
|
SU1534315A1 |
Использование: для измерения расстояний, пройденных автомобилем, преимущественно на сухих не сыпучих грунтах. Сущность изобретения: учет изменения дорожных условий непосредственно в процессе работы устройства за счет компенсации изменения оборотов переднего колеса, что обеспечивает упрощение устройства и повышение его производительности. Указанное достигается тем, что в устройство, содержащее закрепленные на переднем и заднем колесах автомобиля датчики пути, соединенные последовательно программный переключатель, схему сравнения, накопительный счетчик и индикатор, а также генертор импульсов высокой частоты, связанный с вторым входом схемы сравнения, введен блок формирования счетных импульсов, входы которого соединены с датчиками пути, а выход - с входом генератора импульсов высокой частоты, при этом количество датчиков пути, устанавливаемых на передних и задних колесах автомобиля, выбирается из условия kз/kп= nп/nз, где kз и kп - количество датчиков, устанавливаемых соответственно на заднем и переднем колесах; nп и nз - число оборотов переднего и заднего колес автомобиля на эталонном базисе с мягким грунтом. 1 з.п.ф-лы, 2 ил.

где Kз, Kп количество датчиков пути заднего и переднего колес;
nn, nз число оборотов переднего и заднего колес автомобиля на эталонном базисе с мягким грунтом.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для измерения расстояния,пройденного автомобилем | 1984 |
|
SU1303827A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
