Изобретение относится к точному оптическому машиностроению и найдет применение в геодезии, геодинамике, навигации, оптической локации, лазерной дальнометрии, исследовании параметров вращения Земли, исследовании окружающей среды.
Известен лазерный локатор PATS фирмы Sylvania, предназначенный для автоматического сопровождения, определения координат и измерения дальности до целей, снабженных уголковыми отражателями. Локатор состоит из инфракрасного лазерного передатчика, приемного устройства, инфракрасного телевизора с видеоконтрольным устройством, опорно-поворотного устройства и устройства обработки и регистрации результатов измерений.
Для измерения дальности до цели в лазерном локаторе PATS применяется старт-стопная схема измерения временной задержки и используется специальная схема формирования стоп-импульсов, что позволяет производить измерение дальности до цели с ошибкой 30 см в динамическом диапазоне сигналов фотодетектора 60 дБ. При приеме слабых сигналов, уровень которых близок к порогу чувствительности приемника, ошибка увеличивается до 1,5 м, что обуславливает практическую непригодность данной конструкции локатора для использования в настоящее время как в научной, так и народно-хозяйственной деятельности.
Известен также лазерный локатор MOMS, предназначенный для локации искусственных спутников Земли (ИСЗ), снабженных уголковыми оптическими отражателями. Лазерный локатор MOMS представляет собой двухосевое опорно-поворотное устройство с дополнительным лазером, основной лазерный передатчик, цифровую вычислительную машину, аппаратуру контроля и управления и технологическое оборудование. Лазерный локатор MOMS имеет более совершенную конструкцию опорно-поворотного устройства и систему управления опорно-поворотным устройством, что позволяет повысить точность выработки управляющих сигналов. Достоинством данной конструкции является то, что она представляет собой подвижную систему, предназначенную для работы в полевых условиях.
Существенными недостатками лазерного локатора MOMS являются его чрезмерная сложность и в целом невысокие точностные характеристики при измерении дальностей до целей, что значительно ограничивает возможность использования данного лазерного локатора в практической работе.
Известна спутниковая лазерная дальномерная система The Modular Transportable Laser Ranging Sistem (MTLRS), выбранная в качестве прототипа, содержащая двухосевое оптико-механическое устройство (ОМУ), лазерный передатчик, систему охлаждения лазерного передатчика, двухканальную систему управления приводами ОМУ, датчики угол-код, приемник отраженного от цели лазерного излучения, измеритель временных интервалов, главный вычислитель, вычислитель двухканальной системы управления приводами ОМУ, а также блок вторичных источников питания, блок стандарта частоты, блок формирования старт-сигнала, модем связи с внешними потребителями информации и принтер.
Данная спутниковая лазерная дальномерная система отличается высокими техническими характеристиками, соответствующими современным требованиям к спутниковым лазерным дальномерным станциям.
Вместе с тем и прототипу присущи существенные недостатки. Альт-азимутальная компоновка ОМУ приводит к тому, что при сопровождении цели в области полюса возникает "мертвая" зона, т.е. невозможность сопровождения и измерения дальности до ИСЗ, проходящих в зенитной области. Значительные трудности стабилизации точки пересечения азимутальной и угломестной осей, до которой определяется дальность, существенно влияют на точность всех последующих измерений. Наличие редуктора в приводе ОМУ приводит к дополнительным погрешностям наведения за счет всевозможных люфтов. К числу существенных недостатков известной системы следует отнести сложность технической реализации ряда ее блоков, например блока формирования старт-сигнала, исполнение которого в виде отдельного фотоприемника с усилителем и формирователем приводит к появлению дополнительных источников погрешностей при измерении дальности за счет неидентичности каналов фотодетектирования и усиления старт- и стоп-сигналов и повышенного влияния в связи с этим различного рода дестабилизирующих факторов.
Изобретение решает задачу повышения технических и эксплуатационных характеристик спутниковой лазерной дальномерной системы и упрощения ее конструктивной реализации.
Решение этой задачи достигается тем, что в спутниковой лазерной дальномерной системе, содержащей двухосевое ОМУ, лазерный передатчик, первый оптический выход которого связан с передающим коллиматором ОМУ, двухканальную систему управления пространственным положением приемного и передающего телескопов, которая группой n выходов связана с двигателями на осях ОМУ, блок выработки сигналов управления приводами, подключенный своей первой группой n выходов к группе n входов двухканальной системы управления пространственным положением приемного и передающего телескопов и первой группой n входов к группе n выходов электронного блока датчиков угол-код, который своей группой n входов подключен к группе n выходов ОМУ, на осях которого размещены датчики угол-код, приемник отраженного от цели лазерного излучения, подключенный выходом к первому входу измерителя временных интервалов, первый выход которого подключен к первому электрическому входу приемника отраженного лазерного излучения, второй выход к первому входу лазерного передатчика, и блок управления и обработки информации, связанный первой группой n выходов с группой n входов приемника отраженного лазерного излучения, второй группой n выходов с группой n входов изомерителя временных интервалов, третьей группой n выходов с первой группой n входов блока сопряжения с внешними потребителями и источниками информации, четвертой группой n выходов с второй группой n входов блока выработки сигналов управления приводами, причем первая группа n входов блока управления и обработки информации подключена к группе n выходов измерителя временных интервалов, вторая группа n входов к второй группе n выходов блока выработки сигналов управления приводами, третья группа n входов к первой группе n выходов блока сопряжения с внешними потребителями и источниками информации, а также блок стандарта частоты, выход которого соединен с вторым входом измерителя временных интервалов, и блок формирования старт-сигнала, согласно изобретению двухосевому ОМУ содержит вилочное основание, жестко закрепленное на опорном фундаменте, горизонтальную ось в виде полой несущей балки, смонтированной на подшипниках в вилочном основании, подвижную ось, выполненную в виде полой опорной рамы, смонтированной перпендикулярно горизонтальной несущей балке, с возможностью вращения относительно этой оси в подшипниковых опорах, расположенных на внешней поверхности горизонтальной балки, при этом в горизонтальной и подвижной полых несущих осях размещены оптические элементы для передачи лазерного излучения, а в точке пересечения этих осей установлена поворотная призма. На опорной раме по разные стороны ее горизонтальной оси жестко закреплены соответственно передающий коллиматор и приемный телескоп, оптические оси и выходные зрачки которых параллельны друг другу и направлены в одну сторону. Моментные двигатели приводов горизонтальной и подвижной осей и цифровые датчики угол-код смонтированы на соответствующих осях ОМУ, при этом датчик горизонтальной оси соединен с конструкцией оси через полужесткую сильфонную передачу, что позволяет уменьшить влияние осевого и радиального эксцентриситетов этой оси. Блок формирования старт-сигнала выполнен в виде оптического кабеля, один конец которого подключен к второму оптичекому выходу лазерного передатчика через ослабитель лазерного излучения, другой смонтирован в приемнике отраженного лазерного излучения с возможностью подачи старт-сигнала непосредственно на рабочую поверхность фотокатода фотоэлектронного умножителя.
Кроме того, согласно изобретению спутниковая лазерная дальномерная система содержит двухканальный оптический блок фокусирующей оптики и сменных оптических фильтров, подключенный оптическим входом к второму оптическому выходу ОМУ и первым оптическим выходом к первому оптическому входу приемника отраженного лазерного излучения. Каждый канал двухканального оптического блока содержит блок оптических ослабителей с приводом и узел фокусирующих элементов. Канал, расположенный со стороны входа оптического излучения ОМУ, дополнительно содержит элементы спектрального разделения оптических сигналов (дихроичное зеркало и узкополосный фильтр), а первый и второй электрические входы блока соединены соответственно с первым и вторым выходами блока управления и обработки информации. При этом спутниковая лазерная дальномерная система снабжена блоком визуализации оптического изображения (визирное устройство), вход которого подключен к второму оптическому выходу двухканального оптического блока фокусирующей оптики и сменных оптических фильтров.
Таким образом, сущность изобретения заключается в принципиально новом выполнении ОМУ, новом принципе и аппаратуре формирования старт-сигнала, применении одноканального измерителя временных интервалов и безредукторных приводов, что позволяет уменьшить влияние целого ряда составляющих погрешностей измерения дальности до ИСЗ, погрешностей наведения ОМУ на ИСЗ, уменьшить моменты инерциии подвижных частей ОМУ, исключить "мертую" зону в районе зенита, присущую альт-азимутальным монтировкам, и тем самым расширить технико-эксплуатационные характеристики и возможности спутниковых лазерных дальномерных систем.
Существенным достоинством предлагаемой конструктивной реализации ОМУ является техническое решение вопроса стабилизации точки пересечения горизонтальной и подвижной осей, до которой определяется дальность, что обеспечивает повышенную точность, надежность и объективность проводимых измерений. Кроме того, использование в приводе ОМУ моментных двигателей, устранение из конструкции ОМУ соответствующих приводных редукторов позволяет снизить погрешность наведения приемного телескопа и передающего коллиматора на ИСЗ в процессе измерений и тем самым сузить лазерный луч после коллиматора, а значит, увеличить дальность действия спутниковой лазерной дальномерной системы, а также упростить конструктивную реализацию данного узла спутниковой системы.
Снабжение спутниковой лазерной дальномерной системы двухканальным оптическим блоком фокусирующей оптики и сменных оптических фильтров позволяет улучшить ее эксплуатационные характеристики за счет повышения гибкости в управлении параметрами лазерного и визуального каналов в процессе сеанса измерений. Крепление датчика угол-код к горизонтальной балке осуществляется через полужесткую сильфонную передачу, что позволяет уменьшить влияние осевого и радиального эксцентриситетов этой оси, тем самым повысить точность сопровождения ИСЗ лазерным лучом, а значит, обеспечить получение предельно узкого луча после коллиматора лазерного излучения и повысить дальность действия системы.
На фиг.1 изображена структурная схема спутниковой лазерной дальномерной системы; на фиг.2 схема двухосевого ОМУ; на фиг.3 блок-схема лазерного передатчика; на фиг.4 блок-схема приемника отраженного лазерного излучения; на фиг. 5 блок-схема измерителя временных интервалов; на фиг.6 блок-схема двухканальной системы управления пространственным положением приемного и передающего телескопов; на фиг.7 схема блока управления и обработки информации; на фиг.8 схема блока выработки сигналов управления приводами; на фиг.9 схема двухканального оптического блока фокусирующей оптики и сменных оптических фильтров; на фиг.10 схема блока формирования старт-сигнала.
Спутниковая лазерная дальномерная система содержит (фиг.1) двухосевое ОМУ 1, лазерный передатчик 2, приемник 3 отраженного лазерного излучения, измеритель 4 временных интервалов, блок 5 стандарта частоты, двухканальную систему 6 управления пространственным положением приемного и передающего телескопов, блок 7 управления и обработки информации, блок 8 выработки сигналов управления приводами, электронный блок 9 датчиков угол-код, двухканальный оптический блок 10 фокусирующей оптики и сменных оптических фильтров, блок 11 визуализации оптического изображения, блок 12 сопряжения с внешними потребителями и источниками информации и блок 13 формирования старт-сигнала.
Двухосевое ОМУ 1 предназначено для наведения приемного телескопа и коллиматора лазерного излучения на ИСЗ, до которого производится измерение дальности, формирования после коллиматора лазерного излучения луча с необходимой угловой расходимостью, приема отраженного от ИСЗ лазерного сигнала, формирования двух каналов оптического приема лазерного и визуального с помощью двхуканального оптического блока 10 фокусирующей оптики и сменных оптических фильтров, формирования заданного поля зрения приемника и требуемой спектральной полосы приема в лазерном канале, приема и формирования визуального изображения объектов, находящихся в поле зрения приемного телескопа, управления с помощью блоков оптических ослабителей с приводами динамическим диапазоном приемника 3 лазерного отраженного излучения и блока 11 визуализации.
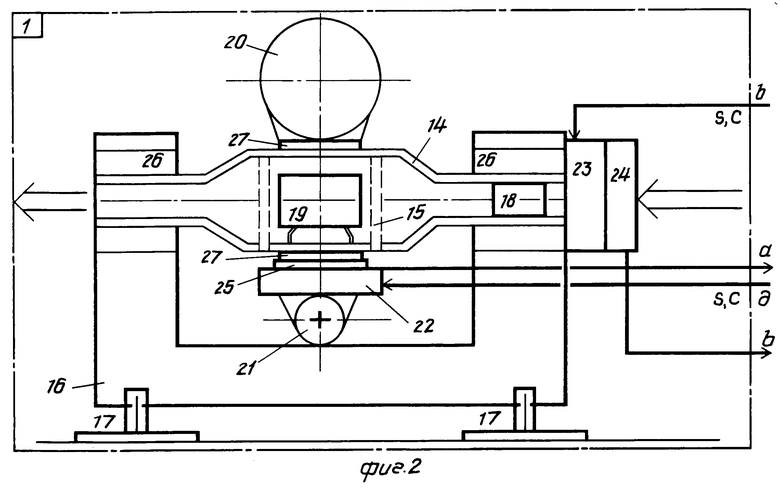
Двухосевое ОМУ (фиг.2) содержит горизонтальную ось 14 в виде полой несущей балки и подвижную несущую ось 15 в виде полой опорной рамы и смонтировано в вилочном основании 16 на опорном фундаменте через опоры 17. Полая опорная рама 15 смонтирована перпендикулярно горизонтальной балке 14 с возможностью вращения относительно оси 15 в подшипниковых опорах, расположенных на внешней поверхности балки 14. В полых несущих осях 14 и 15 размещены оптические элементы 18 для передачи лазерного излучения. В точке пересечения осей 14 и 15 установлена поворотная призма 19. Эта точка пересечения служит референц-точкой, от которой измеряется дальность до ИСЗ, и при вращении приемного телескопа 20 во всем рабочем диапазоне углов положение этой точки в пространстве не меняется, что дает возможность получить стабильную привязку данных измерений к местной или геоцентрической системе координат. На опорной раме оси 15 по разные стороны относительно ее горизонтальной оси жестко закреплены коллиматор 21 лазерного излучения и приемный телескоп 20. Оптические оси коллиматора 21 и телескопа 20 и их выходные зрачки параллельны друг другу и направлены в одну сторону. В данной конструкции использованы известные оптические схемы коллиматора телескоп Галилея и приемного телескопа телескоп Кассегрена. Статоры моментных двигателей 22, 23 приводов горизонтальной 14 и подвижной 15 осей смонтированы соответственно на одном из плеч вилочного основания 16 со стороны входа излучения лазерного передатчика 2 и на поверхности горизонтальной несущей оси 14 в ее центре со стороны коллиматора 21. Роторы этих двигателей смонтированы соответственно на горизонтальной оси 14 и на опорной раме подвижной оси 15. В качестве моментных двигателей могут быть применены серийно выпускаемые двигатели ДБМ-185-16-015-2. Цифровые датчики 24, 25 угол-код установлены по одному на горизонтальной и подвижной осях соответственно вплотную к соответствующим двигателям приводов, при этом датчик 24 горизонтальной оси соединен с конструкцией оси через полужесткую сильфонную передачу, что позволяет уменьшить влияние осевого и радиального эксцентриситетов этой оси на точность измерений датчика. Для датчиков подвижной оси необходимости в сильфонной передаче нет, так как жесткость этой оси выше и величины эксцентриситетов значительно меньше, чем у горизонтальной оси. В качестве цифровых датчиков угол-код могут быть использованы известные датчики типа "индуктосин". Горизонтальная ось 14 в виде полой несущей балки смонтирована в подшипниках 26 вилочного основания 16, а подвижная в подшипниках 27.
Лазерный передатчик 2 предназначен для генерации на длине волны λ= 532 нм лазерных импульсов сверхкороткой длительности (30.2000 пс) с частотой повторения этих импульсов 2-20 Гц с требуемой пространственной структурой излучения и энергией в импульсе.
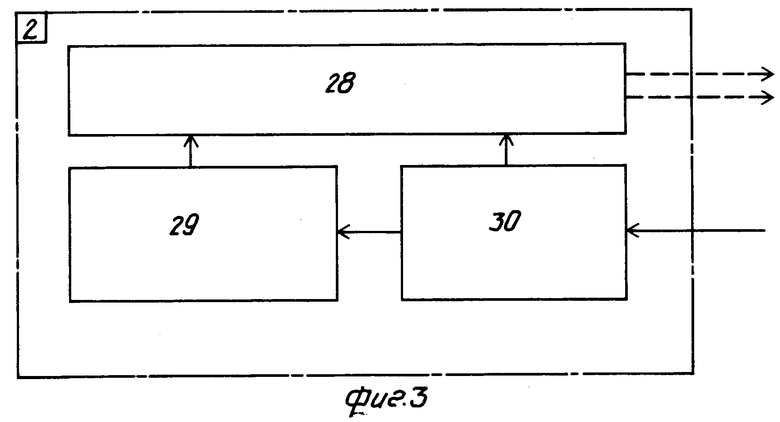
Лазерный передатчик (фиг. 3) включает излучатель 28, блок 29 питания и управления лампами накачки излучателя и блок 30 управления модулятором излучателя. Первый оптический выход лазерного передатчика это лазерный луч, выходящий из выходного окна излучателя, второй оптический выход реализуется путем размещения в лазерном луче рассеивающего элемента незначительных размеров (≈10-2 от ширины луча лазера). Этими рассеивающими элементами, в частности, могут служить неоднородности в стекле выходного окна излучателя или тонкая стальная проволока, помещенная поперек лазерного луча. Соединение второго оптического выхода с блоком 13 сводится таким образом к размещению входного торца оптического световолоконного кабеля в непосредственной близости от такого рассеивающего элемента. Первый оптический выход лазерного передатчика связан с передающим коллиматором 21 ОМУ по первому оптическому входу ОМУ, второй оптический выход лазерного передатчика соединен с блоком 13 формирования старт-сигнала. По первому электрическому входу лазерного передатчика подаются импульсы управления его излучением от второго выхода измерителя 4 временных интервалов.
Приемник 3 отраженного лазерного излучения предназначен для преобразования принятого приемным телескопом 20 и пришедшего по первому оптическому входу отраженного от ИСЗ излучения лазерного передатчика 2 стоп-сигнала и пришедшего из блока 13 по оптическому входу лазерного передатчика оптического старт-сигнала в электрические импульсы, осуществления временной селекции этих импульсов от фоновых шумовых импульсов и от электрических помех, предварительного их усиления и передачи к измерителю 4 временных интервалов.
Приемник 3 отраженного лазерного излучения содержит (фиг.4) блок 31 фотоэлектронного умножителя (ФЭУ), широкополосный стробируемый видеоусилитель 32, программируемый блок 33 питания ФЭУ и блок 34 питания видеоусилителя. Приемник 3 выходом подключен к первому входу измерителя 4 временных интервалов, а входом к его первому выходу, своей группой n входов к первой группе n выходов блока 7 управления и обработки информации. Первый оптический вход приемника 3 соединен с первым оптическим выходом двухканального оптического блока 10 фокусирующей оптики и сменных оптических фильтров, второй оптический вход соединен с блоком 13 формирования старт-сигнала. Широкополосный стробируемый видеоусилитель 32 осуществляет усиление электрических импульсов, поступающих с ФЭУ и временную селекцию старт- и стоп-сигналов от шумов и помех под управлением строб-импульсов, поступающих из измерителя 4 временных интервалов по второму входу. На второй вход блока 33 подается из блока 7 управления и обработки информации управляющий цифровой код для регулировки напряжения питания ФЭУ, что позволяет программно устанавливать напряжение на ФЭУ в зависимости от уровня фона и (или) стоп-сигнала и повышать тем самым надежность и точность измерений.
Измеритель 4 временных интервалов служит для прецизионного измерения времени распространения импульсов лазерного излучения до ИСЗ и обратно и моментов их излучения. Помимо этой главной функции измеритель обеспечивает интерфейс с оператором системы через блок 7 управления и обработки информации для задания режимов измерений и их оперативной коррекции, выполнение сервисных функций, связанных с синхронизацией внутренних часов измерителя временных интервалов по внешним сигналам единого времени (СЕВ), оценкой уровня фона в процессе измерений, калибровкой, метрологическим и функциональным контролем, прием и выдачу соответствующей цифровой информации и данных измерений в блок управления и обработки информации, а также формирование сигналов управления лазерным передатчиком 2 и стробов для старт- и стоп- сигналов.
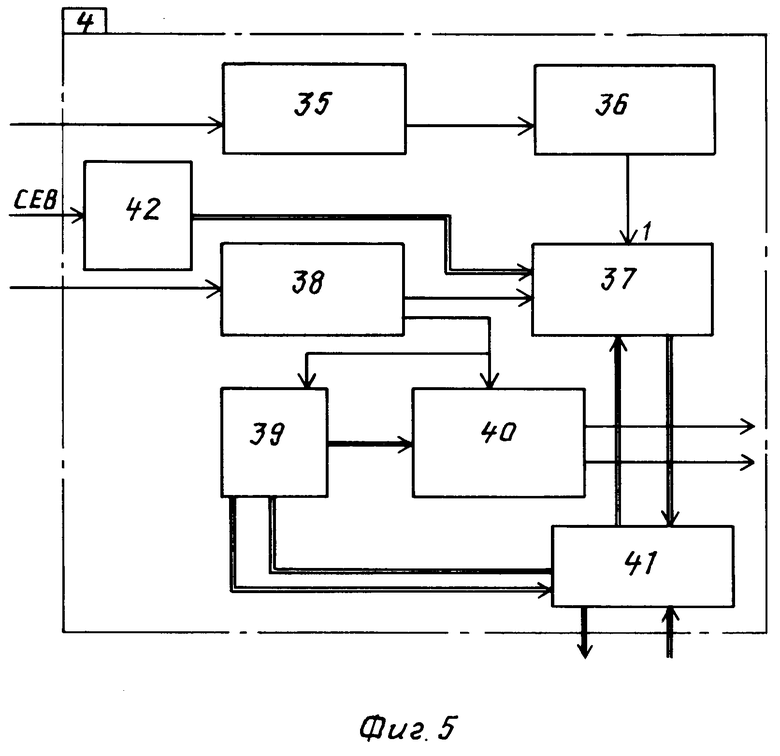
Измеритель временных интервалов содержит (фиг.5) формирователь 35 стандартных импульсов из сигналов "Старт" и "Стоп", формирователь 36 "временных ворот" с длительностью, равной измеряемому интервалу, счетчик 37 числа эталонных счетных импульсов внутри "временных ворот", генератор 38 эталонных счетных импульсов и сетки служебных импульсов, служебный интерфейс 39, генератор 40 импульсов управления лазерным передатчиком и "строба дальности", интерфейсную плату 41 выдачи цифрового кода измеренной дальности, момента времени импульса "Старт" и приема кода предустановок и часы 42 системы.
Блок 5 стандарта частоты предназначен для генерации высокостабильного по частоте синусоидального сигнала 5 МГц для использования в измерителе временных интервалов.
Двухканальная система 6 управления пространственным положением приемного и передающего телескопов предназначена для формирования сигналов, необходимых для работы моментных двигателей 22, 23 на осях ОМУ. Оба канала этой системы (для двигателя 22 и для двигателя 23) полностью идентичны, на фиг.6 показана блок-схема для одного из двигателей.
Система 6 управления пространственным положением приемного и передающего телескопов (один ее канал) содержит цифроаналоговый преобразователь (ЦАП) 43 синусного подканала, ЦАП 44 косинусного подканала, амплитудно-временной преобразователь 45 синусного и косинусного подканалов и блок 46 силовых ключей синусного и косинусного подканалов.
Каждый из входных подканалов а и b на фиг.2 в свою очередь подразделяется на синусный (s) и косинусный (с) подканалы, сигналы которых подаются на две обмотки в каждом из двигателей соответственно. Таким образом, связь между групповым выходом системы 6 и групповым входом ОМУ 1 на фиг.1 фактически подразделяется на четыре по синусному и косинусному подканалу на каждый из двух двигателей.
Блок 7 управления и обработки информации обеспечивает вычисление перед сеансом измерений целеуказаний по эфемеридам ИСЗ и формирование файла данных для использования в блоке двухканальной системы 6 управления пространственным положением приемного и передающего телескопов в процессе сеанса измерений для сопровождения ИСЗ; вычислительную поддержку работы измерителя 4 в реальном времени в процессе измерений, поддержку интерфейса между оператором и спутниковой системой; формирование и передачу блокам необходимых для работы команд; накопление и запись измерительной информации и протоколов сеансов измерений; форматирование данных измерений для передачи через блок 12 сопряжения с внешними потребителями и источниками информации; послесеансовую обработку измерительной информации.
В качестве блока управления и обработки информации в предлагаемом варианте реализации изобретения применен персональный компьютер 1 ВМ РС/АТ с 286/287 процессорами в стандартной комплектации.
Блок 7 управления и обработки информации содержит (фиг.7) блок 47 сопряжения, блок 48 обработки информации от измерителя дальности (вычислитель), пульт 49 управления, дисплей 50 оператора, накопитель 51 информации.
Блок 7 управления и обработки информации первой группой n выходов соединен с группой n входов приемника 3 отраженного лазерного излучения, второй группой n выходов с группой n входов измерителя 4 временных интервалов, третьей группой n выходов с первой группой n входов блока 12 сопряжения с внешними потребителями и источниками информации, четвертой группой n выходов с второй группой n входов блока 8 выработки сигналов управления приводами. Первая группа n входов блока 7 подключена к группе n выходов измерителя 4 временных интервалов, вторая группа n входов к второй группе n выходов блока 8 выработки сигналов управления приводами, а третья группа n входов к первой группе n выходов блока 12 сопряжения с внешними потребителями и источниками информации. Первый и второй выходы блока 7 подключены к соответствующим входам блока 10.
Блок 47 сопряжения предназначен для осуществления ввода-вывода данных между блоком 48 обработки информации, измерителем 4 и приемником 3 и реализован в виде платы, допускающей установку внутрь блока 48 и подключение к его системной шине. Блок 48 обработки информации служит для реализации вычислительных функций и представляет собой стандартный блок процессора от 1 ВМ РС/АТ. Пульт 49 управления может быть реализован на основе стандартной клавиатуры от 1 ВМ РС/АТ. Имеющиеся на клавиатуре функциональные клавиши F1-F12 могут быть запрограммированы с помощью команд операционной системы MS-DOS, поставляемой с компьютером 1 ВМ РС/АТ, на исполнение управляющих функций в спутниковой системе, например клавиша F1 может быть назначена как "пуск лазера" и т.д. В таком случае при нажатии клавиши F1 ее код поступает на четвертый вход блока 48, далее через блок 47 сопряжения он следует в измеритель 4, где преобразуется в генераторе 40 в импульс запуска лазерного передатчика 2 и передается на его вход с второго выхода измерителя 4. Аналогично могут быть определены функции других клавиш F2.F12.
Блок 8 выработки сигналов управления приводами предназначен для исполнения численных алгоритмов в блоке обработки информации от датчиков угол-код, необходимых для работы приводов ОМУ, а также для поддержки интерфейсной связи с двухканальной системой 6 управления пространственным положением приемного и передающего телескопов и датчиками 24, 25 угол-код на осях ОМУ.
Блок 8 выработки сигналов управления приводами содержит (фиг.8) блок 52 обработки информации от датчиков угол-код и блок 53 сопряжения с источниками и потребителями информации. Первая группа n входов и первая группа n выходов блока 8 подключены соответственно к группе n выходов электронного блока 9 датчиков угол-код и группе n входов двухканальной системы 6 управления пространственным положением приемного и передающего телескопов.
Блок 52 обработки информации от датчиков угол-код реализован в виде стандартного процессора 1 ВМ РС/АТ 286, а блок 53 реализован по такой же схемотехнике, как и блок 47.
Электронный блок 9 датчиков угол-код предназначен для усиления и обработки сигналов с датчиков 24, 25 угол-код и выдачи в цифровом виде информации об угле поворота каждой из осей 14 и 15.
Двухканальный оптический блок 10 фокусирующей оптики и сменных оптических фильтров предназначен для формирования двух каналов приема в спутниковой ситеме лазерного и визуального, спектрального разделения сигналов в этих каналах, спектральной селекции лазерного сигнала от шумов фона, пространственной селекции лазерного сигнала от фона.
Двухканальный оптический блок 10 содержит (фиг.9) приводы 54 и 55, узлы 56 и 57 оптических ослабителей, узел 58 спектрального разделения оптических сигналов, узкополосный оптический фильтр 59 и узел 60 фокусирующих оптических элементов. Первый и второй входы блока 10 предназначены для приема управляющих сигналов от блока 7 для управления приводами 54 и 55. Первый и второй оптические выходы блока 10 соединены соответственно с первым оптическим входом приемника 3 отраженного от цели лазерного излучения и оптическим входом блока 11 визуализации. Блок 10 своим оптическим входом подключен к оптическому выходу ОМУ 1.
Узел 56 оптических ослабителей (и аналогично узел 57) может быть реализован в виде кольцеобразной кассеты, в которой секторами размещены пластины из нейтрального стекла с разной оптической плотностью. Кассета размещается так, что принимаемый сигнал на своем пути от дихроичного зеркала до первого выхода блока 10 проходит через один из секторов перпендикулярно плоскости пластины. При вращении кассеты приводом 55 на угол, соответствующий одному сектору, фильтр меняется на соседний.
Блок 11 визуализации оптического изображения предназначен для преобразования оптического изображения объектов в поле зрения приемного телескопа в удобный для оператора вид и предоставления оператору визуальной информации о точности отслеживания приводами ОМУ ИСЗ для возможной ручной подкорректировки слежения.
Блок 12 сопряжения с внешними потребителями и источниками информации предназначен для передачи в физический канал связи измерительной информации и протоколов в требуемом формате данных.
Блок 13 формирования старт-сигнала предназначен для формирования оптического старт-сигнала с энергией приблизительно 10-13.10-14 Дж и передачи этого сигнала от лазерного передатчика 2 к приемнику 3 на его второй оптический вход.
Блок 13 содержит (фиг.10) оптический световолоконный кабель 61 и ослабитель 62 лазерного излучения. Один конец лазерного кабеля 61 подключен к второму выходу передатчика 2 через ослабитель 62 лазерного излучения, а другой конец кабеля 61 смонтирован в приемнике 3 отраженного лазерного излучения с возможностью подачи старт-сигнала на рабочую поверхность фотокатода ФЭУ. Ослабитель 62 это пакет пластин из нейтрального стекла для ослабления сигнала до примерно того же уровня (10-12.10-14 Дж), что и ожидаемый отраженный от ИСЗ лазерный сигнал.
Спутниковая лазерная дальномерная система работает следующим образом.
Излучение лазерного передатчика 2 с первого оптического выхода поступает на первый оптический вход ОМУ (фиг.2) и после отражения от поворотной призмы 19, расположенной в пересечении горизонтальной 14 и подвижной 15 осей, через оптические компоненты коллиматора 21 узким лучом с первого оптического выхода ОМУ направляется к ИСЗ. С второго оптического выхода лазерного передатчика незначительная доля лазерного излучения через блок оптических ослабителей 62 по оптическому световолоконному кабелю 61 поступает на второй оптический вход приемника 3 отраженного лазерного сигнала и подается далее на ту же область фоточувствительной площадки приемника, что и принимаемый сигнал от ИСЗ. Излучение лазерного передатчика, отраженное от ИСЗ, поступает на приемный телескоп 20 ОМУ (второй оптический вход ОМУ на фиг.1) и после отражения от той же поворотной призмы (19 на фиг.2) с второго оптического выхода ОМУ поступает на первый оптический вход двухканального оптического блока 10 фокусирующей оптики и сменных оптических фильтров и через дихроичное зеркало в узле 58 вторичных оптических элементов, узел 57 сменных нейтральных ослабителей и узкополосный фильтр 59 с первого оптического выхода блока 10 поступает на первый оптический вход приемника 3.
Одновременно с лазерным сигналом, отраженным от ИСЗ, в приемный телескоп 20 попадает излучение от посторонних объектов, а также излучение Солнца, рассеянное ИСЗ (если спутник находится на освещенной части своей орбиты). Это излучение также попадает на дихроичное зеркало в узле 58, но не отражается им, а проходит через него к блоку 11 визуализации. По пути это излучение проходит через узел 56 сменных нейтральных фильтров 56 с приводом 54 и узел 60 фокусирующих оптических элементов. Изображение с блока визуализации дает возможность оператору подкорректировать слежение за ИСЗ телескопом спутниковой системы по двум угловым координатам.
В приемнике 3 отраженного лазерного сигнала световые сигналы "Старт" (поступает по второму оптическому входу) и "Стоп" (поступает по первому оптическому входу) преобразуются в соответствующие электрические импульсы, усиливаются широкополосным видеоусилителем 32 и передаются в измеритель 4 временных интервалов на его первый вход.
Данные измерений поступают в блок 7 управления и обработки информации для первичной обработки, отображения и архивации. В процессе сеанса наблюдений формируется протокол сеанса, который также записывается в файл в блоке 7 управления и обработки информации. Все данные измерений могут быть переданы во внешние каналы связи через стандартный блок 12 сопряжения. В процессе сеанса наблюдений все программы, управляющие работой системы, функционируют в режиме реального времени.
После завершения прохода ИСЗ по запланированной дуге траектории по команде оператора через пульт 49 управления блока 7 управления и обработки информации выключается лазерный передатчик 2 и прекращается движение приемного телескопа 20 и коллиматора 21. После этого может быть проведена вторичная обработка измерительной информации, послесеансовые калибровки и тестирование.
Опытный образец спутниковой лазерной дальномерной системы имеет следующие характеристики:
ОМУ
Максимальная скорость слежения
приводов 10 град/с
Неортогональность осей не хуже ±4 угл.с
Диапазон наблюдений 0-360 угл.град. по азимуту
75 угл.град. по зенитному расстоянию
Скручивание осей ≅ 2 угл.с
Параллельность приемной и
передающих оптических осей 5 угл.с
Отклонение оптических осей телескопа,
коллиматора при перемещении вокруг
горизонтальной и подвижной осей 3 угл.с
Угловое разрешение датчиков угол-код 22 разряда (0,31 угл.с)
Привод
Тип безредукторный бесконтактный электросиловой
привод с моментными двигателями
Коллиматор лазерного излучения
Тип Галилея
Расходимость излучения на выходе 2 угл. мин широкий луч
коллиматора ≅ 30 угл.с узкий луч
Выходной диаметр коллиматора 190 мм
Приемный телескоп
Тип Кассегрена
Диаметр 500 мм
Оптические ослабители управляемые от компьютера
Узкополосный фильтр 5 
Лазерный передатчик
Тип Nd:YAG
Длина волны 532 нм
Энергия в импульсе 0,08-0,1 Дж
Длительность импульса 100-200 пс
Приемник отраженного лазерного излучения
Тип фотодетектора ФЭУ-164, ФЭУ-165
Квантовая эффективность 10.15%
Длительность импульса ≅ 0,5 нс
Установка строба 1 мкс 1 с /шаг 100 нс 100 нс 10 мс/ шаг 100 нс
Измеритель временных интервалов 50 пс
Процессор приводов
Тип 1 ВМ РС/АТ-286
Служба времени
Блок стандарта частоты рубидиевый стандарт 5 МГц
Главный вычислитель
Тип 1 ВМ РС/АТ-286
Спутниковая система имеет следующие характеристики: дальность действия 0,3-25000 км (при наличии оптической видимости, с энергией излучения передатчика не менее 0,1 Дж в импульсе на рабочей длине волны); среднюю квадратическую погрешность единичного измерения 0,1 м, "нормального места" 2-3 см; неисключаемую систематическую погрешность во всем диапазоне принимаемых сигналов не более 0,05 м; световой диаметр приемного телескопа 0,5 м; предельную погрешность наведения и слежения за ИСЗ во всем диапазоне видимых скоростей наблюдаемых ИСЗ не более 5 угл.с; диапазон наблюдений по азимуту 0-360о, по зенитному расстоянию 75о (предусмотрена возможность работы по реперу на зенитном расстоянии до 91о); возможность ручной коррекции наведения на ИСЗ или репер при наблюдении через телевизионный канал; поле зрения телевизионного канала не менее 1ох1о; проницающую силу ТV-канала по звездам не слабее +13m; длительность принимаемых оптических импульсов 0,25-2,7 нс; нестабильность (включая дрейф) времени задержки сигнала в приемнике не более 0,3 нс; уровень шумов на выходе при наведении телескопа на участке неба с отсутствием звезд ярке 4+m не более 1 ˙ 106 одноэлектронных импульсов в секунду; защита приемника от повреждения при случайном попадании в поле зрения телескопа полной Луны; обеспечено измерение и регистрация моментов посылки одного зондирующего и приема не менее двух импульсов в стробe отраженного сигнала с дискретностью 0,3 нс.
Спутниковая система, выполненная в соответствии с изобретением, отличается высокой точностью слежения по углам, высокой точностью измерения дальности, имеет компактную конструкцию ОМУ, позволяющую в перспективе реализовать мобильный вариант такой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНО-РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2004 |
|
RU2263930C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТОВ ОРГАНИЧЕСКОГО ПРОИСХОЖДЕНИЯ | 2003 |
|
RU2233438C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2793613C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2785768C1 |
| Устройство обнаружения оптических и оптико-электронных приборов | 2020 |
|
RU2746089C1 |
| СИСТЕМА ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЯ С ОПТОВОЛОКОННЫМ ВЫВОДОМ НА ЦЕЛЬ | 2023 |
|
RU2816822C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2568336C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ ФОРМИРОВАНИЯ И НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ ИЗЛУЧАТЕЛЕЙ С ОПТОВОЛОКОННЫМИ ВЫВОДАМИ НА ЦЕЛЬ | 2022 |
|
RU2784602C1 |
| МНОГОКАНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2617459C1 |






Изобретение относится к точному оптическому машиностроению и может быть использовано в системах геодезии, геодинамике, навигации, оптической локации, лазерной дальнометрии. Изобретение обеспечивает улучшение технических и эксплуатационных характеристик спутниковой лазерной дальномерной системы и упрощение ее конструктивной реализации. Система содержит двухосевое оптико-механическое устройство 1, лазерный передатчик 2, приемник 3 отраженного лазерного излучения, измеритель 4 временных интервалов, блок 5 стандарта частоты, двухканальную систему 6 управления пространственным положением приемного и передающего телескопов, блок 7 управления и обработки информации, блок 8 выработки сигналов управления приводами, электронный блок 9 датчиков угол-код, двухканальный оптический блок 10 фокусирующей оптики и сменных оптических фильтров, блок 11 визуализации оптического изображения, блок 12 сопряжения с внешними потребителями и источниками информации и блок 13 формирования старт-сигнала. Двухосевое оптико-механическое устройство содержит полые несущие оси, в которых размещены оптические элементы для передачи лазерного излучения. В точке пересечения осей установлена поворотная призма. На опорной раме подвижной оси закреплены коллиматор лазерного излучения и приемный телескоп. Статоры моментных двигателей приводов осей смонтированы соответственно на одном из плеч вилочного основания и на поверхности горизонтальной оси, а роторы - соответственно на горизонтальной оси и на опорной раме подвижной оси. 1 з.п. ф-лы, 10 ил.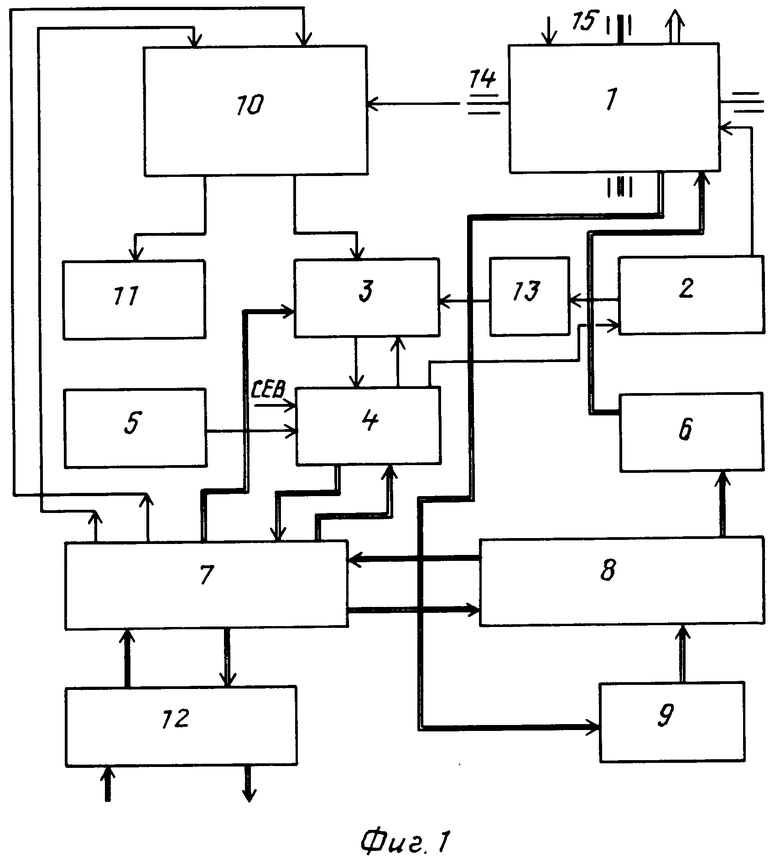
| Vermaat E, Wilson P | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

