Изобретение относится к оптико-радиолокационным устройствам и может быть использовано в высокоточных локационных комплексах (системах) для наведения лазерного излучения на наблюдаемые подвижные воздушные и космические объекты, для обнаружения и определения параметров (координат) движения удаленных объектов. Изобретение найдет применение также в измерительных и информационных системах в навигации, оптической локации и лазерной дальнометрии.
Известны оптические или лазерные угломерно-дальномерные станции и комплексы, осуществляющие высокоточное определение координат целей, дальномерные наблюдения (см. патенты РФ №№2011207,001 S 17/00; 2103707, G 01 S 17/00; 2111510, G 01 S 17/32; 2152056, G 01 S 17/00; 2183841, G 01 S 17/00). Лазерные локационные станции (ЛЛС) имеют узкие диаграммы направленности приемопередающей оптики, что обеспечивает высокую точность измерения координат движущихся объектов.
Анализ практического использования лазерных локационных станций (ЛЛС) свидетельствует, что для оперативного и эффективного решения ряда ответственных задач лазерные угломерно-дальномерные станции требуют внешних целеуказаний для своего выведения в измерительную рабочую зону, например, от радиолокационной станции (РЛС), работающей в широкой зоне обзора и находящейся на определенном удалении от лазерной локационной станции (ЛЛС).
РЛС представляет собой активное устройство, так как для обнаружения цели и определения ее характеристик в ней используется электромагнитное излучение, формируемое и направляемое в заданную точку пространства передающими антеннами радиолокационной станции.
Способность обнаруживать цель на больших расстояниях и определять ее положение с относительно высокой точностью представляют два основных характерных свойства РЛС, которые обуславливают широкое использование подобных станций и многообразие их конструктивной реализации (см. патенты РФ №№2037842, G 01 S 13/02; 2038609, G 01 S 13/02; 2040006, G 01 S 13/02; 2095823, G 01 S 13/02; 2096801, G 01 S 13/02; 2178185, G 01 S 13/00). Необходимо отметить, что для известных РЛС, характеризующихся в целом высокой точностью обнаружения цели и определения ее координат, характерен органический недостаток снижающий эффективность применения подобных локационных станций - потеря скрытности РЛС в процессе ее работы и повышенная уязвимость всего комплекса от средств противодействия.
Наиболее близкой по технической сущности и уровню эксплуатационных характеристик к патентуемому изобретению является спутниковая лазерная дальномерная система ( патент РФ №2037849, G 01 S 17/00, 03.08.1992 г.). Лазерная дальномерная система, выбранная в качестве прототипа, содержит двух осевое оптико-механическое устройство 1, лазерный передатчик 2, приемник 3 отраженного лазерного излучения, измеритель 4 временных интервалов, блок 5 стандарта частоты, двухканальную систему 6 управления пространственным положением приемного и передающего телескопов, блок 7 управления и обработки информации, блок 8 выработки сигналов управления приводами, электронный блок 9 датчиков угол-код, двухканальный оптический блок 10 фокусирующей оптики и сменных оптических фильтров, блок 11 визуализации оптического изображения, блок 12 сопряжения с внешними потребителями и источниками информации и блок 13 формирования старт сигнала.
Лазерная дальномерная система по патенту РФ №2037849 отличается высокой точностью слежения по углам, высокой точностью измерения дальности, имеет компактную конструкцию оптико-механического устройства, что позволяет реализовать мобильный вариант лазерной станции.
Практика использования лазерной дальномерной станции по патенту РФ №2037849 и подобных комплексов и систем, а также совершенствование технических средств и систем противодействия работе лазерных комплексов обуславливает необходимость поиска качественно новых конструктивных решений, которые позволяют повысить эффективность работы ЛЛС. Очевидно, что работа ЛЛС во взаимодействии с внешним целеуказателем (РЛС) позволяет сократить время обнаружения наблюдаемого объекта в широком угловом секторе обзора.
Вместе с тем, разнесенным в пространстве и совместно работающим ЛЛС и РЛС присущи существенные эксплуатационные недостатки, которые значительно снижают эффективность работы подобного комплекса:
- при пространственном разнесении РЛС и ЛЛС возникают ошибки рассогласования оптической и радиотехнической линий визирования на объект, измерение координат которого производится;
- для эффективной совместной работы станций требуется точная взаимная геодезическая привязка местоположений РЛС и ЛЛС, что ухудшает тактико-технические свойства комплекса, связанные с мобильностью, координацией их работы и быстротой развертывания (свертывания) на позиции;
- при пространственном разнесении станций появляется протяженный канал передачи данных от РЛС к ЛЛС с соответствующей аппаратурой, который подвержен воздействию помех различного рода, в том числе преднамеренных.
Настоящее изобретение решает задачу создания мобильного и компактного лазерно-радиолокационного комплекса, который гармонично сочетает в себе высокую точностью измерения координат летательных и движущихся объектов, присущую лазерным измерительным средствам, имеет минимальное время развертывания комплекса и минимальное время поиска в широком секторе обзора и захвата на автосопровождение движущейся цели, имеет эффективную систему защиты от обнаружения.
Решение поставленной задачи достигается следующим образом.
На опорно-поворотной платформе осуществляют рациональное размещение лазерной приемопередающей оптики и приемопередающей радиоантенны РЛС. Это позволяет конструктивно реализовать двухканальный локационный комплекс, первый информационно-измерительный канал которого осуществляет радиолокационное обнаружение, слежение и сопровождение объекта и тем самым обеспечивает уточненное целеуказание для второго информационно-измерительного канала, а второй информационно-измерительный канал осуществляет лазерную (оптическую) локацию подвижного объекта, обеспечивая высокоточные координатные измерения. Для совмещения оптической и радиотехнической осей систем осуществляется центральное расположение приемопередающей оптики ЛЛС в раскрыве антенного полотна фазированной антенной решетки (ФАР) или неэквидистантной ФАР. При этом приемопередающие оптические антенны и радиоантенну, лазерный передатчик и приемник оптических сигналов конструктивно выполняют в виде единого объединенного модуля, что обеспечивает станции компактность, возможность построения РЛС и ЛЛС в составе одной мобильной конструкции, исключает необходимость применения внешних каналов обмена информационными потоками, повышает точность работы всего комплекса за счет совмещения оптической и радиотехнической осей станции, упрощает юстировку радиооси РЛС за счет использования оптических данных калибровочных измерений, позволяет сократить время локации цели. Кроме того, применение ФАР или НФАР в составе РЛС позволяет расширить тактические свойства объединенного комплекса за счет организации многоцелевой работы РЛС, выбора приоритетных, наиболее опасных целей, использования адаптивных алгоритмов формирования нулей в диаграммах направленности ФАР в направлениях прихода помех и облучения нежелательных объектов, пеленгующих направления приходящих зондирующих импульсов станции.
Схемотехнически решение поставленной задачи осуществляется следующим образом.
Лазерно-радиолокационная станция, содержащая размещенные на опорно-поворотном устройстве передающую оптическую антенну, подключенную к выходу лазерного передатчика, на входе которого установлен блок питания и управления лазерным передатчиком, приемную оптическую антенну, подключенную оптическим выходом к оптическому входу приемника оптических сигналов, многоразрядный выход которого подключен к многоразрядному входу блока первичной обработки принятых оптических сигналов, установленные на оси α опорно-поворотного устройства привод для оси α, первый вход которого подключен к выходу блока управления приводом по оси α и датчик положения оси α, установленные на оси β опорно-поворотного устройства привод для оси β, первый вход которого подключен к выходу блока управления приводом по оси β и датчик положения оси β, согласно настоящему изобретению на опорно-поворотном устройстве размещены приемопередающая радиоантенна, выход которой соединен с первым входом диаграммообразующей схемы ФАР или НФАР, первый и второй выходы которой подключены соответственно к входу приемопередающей радиоантенны и первому входу блока приемных модулей ФАР или НФАР. Второй вход диаграммообразующей схемы соединен с выходом блока передающих модулей ФАР или НФАР, первый и второй входы которого подключен соответственно к первому и седьмому выходу подвижной части вращающегося контактного устройства (ВКУ).
Первый, второй, третий, четвертый, пятый и шестой выходы вращающейся части ВКУ подключены соответственно к второму входу приемопередающего блока контроля, к входу блока первичной обработки принятых оптических сигналов, к первому входу приемника оптических сигналов, к первому входу блока питания и управления лазерным передатчиком, второму входу приемника оптических сигналов, к третьему входу диаграммообразующей схемы и второму входу блока приемных модулей ФАР или НФАР, выход которого подключен к первому входу подвижной части ВКУ. Второй вход подвижной части ВКУ подключен к выходу приемопередающего блока контроля. Первый, второй и третий многоразрядные входы подвижной части ВКУ подключены соответственно к многоразрядному выходу датчика положения оси β, многоразрядному выходу блока первичной обработки принятых оптических сигналов и второму многоразрядному выходу неподвижной части вращающегося контактного устройства, выход которого соединен с третьим входом подвижной части вращающегося контактного устройства, многоразрядный выход которого соединен с первым многоразрядным входом неподвижной части ВКУ, первый многоразрядный выход которого подключен к первому многоразрядному входу блока управления приемопередающими радио и оптическими каналами.
Согласно изобретению первый, второй и третий многоразрядные выходы блока управления приемопередающими радио и оптическими каналами подключены соответственно к второму многоразрядному входу неподвижной части вращающегося контактного устройства, многоразрядному входу блока вторичной обработки принятых радиосигналов и многоразрядному входу блока вторичной обработки принятых оптических сигналов, первый и второй выходы блока управления приемо-передающими радио и оптическими каналами соединены соответственно с первым входом датчика положения оси β и первым входом датчика положения оси α.
Согласно настоящему изобретению станция содержит блок управления станцией, первый, второй, третий, четвертый и пятый многоразрядные входы которого подключены соответственно к многоразрядному выходу блока вторичной обработки принятых оптических сигналов, многоразрядному выходу блока интерфейса с оператором станции, к многоразрядному выходу блока вторичной обработки принятых радиосигналов, многоразрядному выходу датчика положения оси α и многоразрядному выходу блока интерфейса внешних целеуказаний.
Первый, второй и третий многоразрядные выходы блока управления станцией соединены соответственно с вторым многоразрядным входом блока управления приемопередающими радио и оптическими каналами, с многоразрядным входом блока передачи информации внешнимпотребителям и мнооразрядным входом блока отображения информации станции, первый и второй выходы блока управления станции подключены соответственно к первому входу блока управления приводом по оси α и первому входу блока управления приводом по оси β.
Согласно изобретению станция содержит блок вторичного электропитания первый, второй, третий и четвертый выходы которого подключены соответственно к вторым входам привода по оси α, блока управления приводом по оси α и блока управления приводом по оси β, к второму входу датчика положения оси β, к входу неподвижной части вращающегося контактного устройства, к вторым входам привода для оси β и датчика положения оси α, входу блока управления приемопередающими радиооптическими каналами, входу блока вторичной обработки принятых радиосигналов, входу блока управления станцией, входу блока интерфейса с оператором станции, входу блока отображения информации станции и входу блока передачи информации внешним потребителям.
Настоящее изобретение предусматривает, что приемопередающая радиоантенна, передающая оптическая антенна, приемная оптическая антенна, лазерный передатчик и приемник оптического сигнала выполнены в виде мономодуля, в котором приемопередающая радиоантенна выполнена в виде объединенного раскрыва фазированной или неэквидистантной фазированной антенной решетки, которая содержит от 2 до 8 плоских прямоугольных антенных панелей, расположенных симметрично по окружности, в центре которых в установочном гнезде расположены передающая и приемная оптическая антенны.
При другом варианте реализации изобретение предусматривает, что приемопередающая радиоантенна, передающая оптическая антенна, приемная оптическая антенна, лазерный передатчик и приемник оптического сигнала выполнены в виде мономодуля, в котором приемопередающая радиоантенна выполнена в виде фазированной или неэкведистантной фазированной решетки прямоугольной или квадратной формы, в центре которой в установочном гнезде расположены передающая и приемная оптические антенны.
Согласно изобретению все компоненты станции смонтированы на колесном или гусеничном или плавающем транспортном средстве.
Технический результат патентуемого изобретения заключается в том, что реализованные в локационном комплексе схемотехнические и конструктивные решения позволяют:
- на базе единого опорно-поворотного устройства реализовать высокоэффективный двухканальный локационный комплекс. Первый информационно-измерительный канал разработанного комплекса обеспечивает радиолокационное обнаружение, захват и сопровождение подвижной цели, а второй информационно-измерительный канал - лазерную локацию подвижной цели;
- обеспечить высокую точность измерения координат различных летательных и движущихся целей;
- максимально сократить время предварительного целеуказания для лазерного канала и тем самым уменьшить время поиска, обнаружения и захвата на автосопровождение обнаруженной цели;
- значительно сократить время развертывания комплекса и приведения его в рабочую готовность;
- обеспечить скрытность работы комплекса за счет перестройки несущей частоты радиоканала по случайному закону в полосе, а также за счет адаптивной настройки «нулей» диаграммы направленности (ДН) в направлении источника помех или средств поражения комплекса, например ракет с головкой самонаведения по радиолокационному сигналу.
Сущность патентуемого изобретения поясняется примером конкретной реализации лазерно-радиолокационной станции и чертежами, на которых приведены:
фиг.1 - укрупненная блок-схема станции;
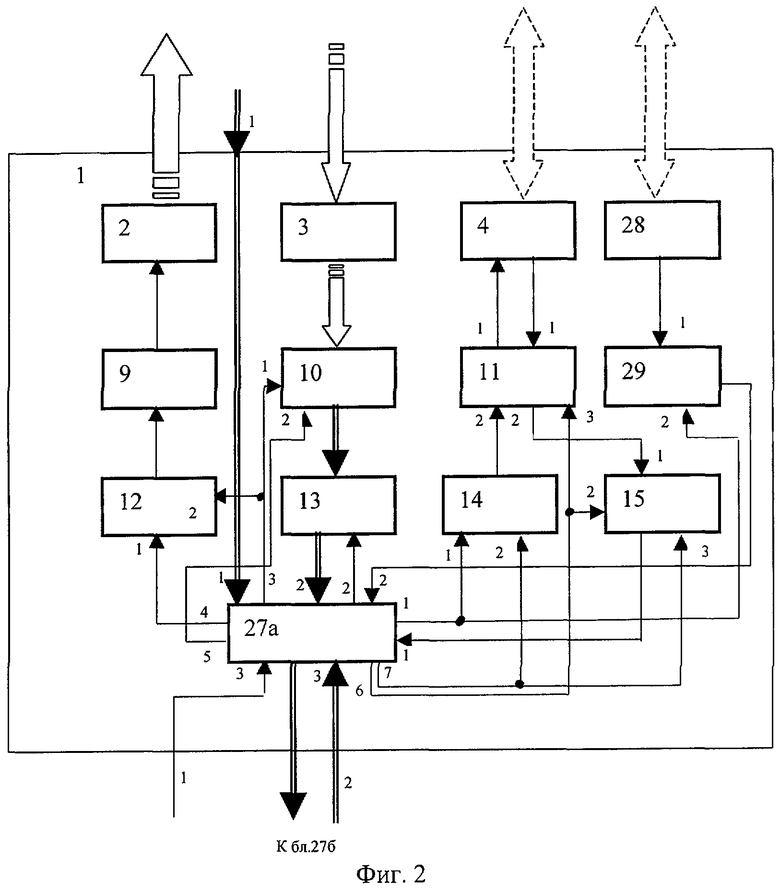
фиг.2 - блок-схема оптико-радиотехнического приемопередающего модуля 1;
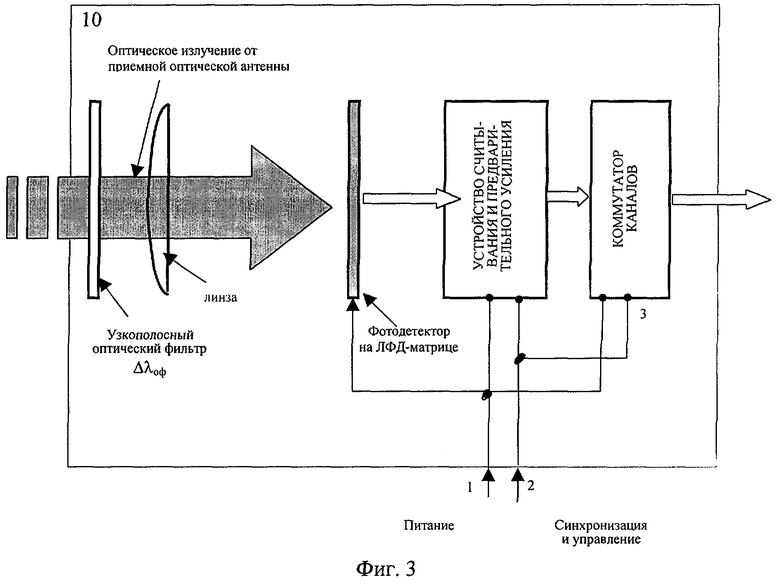
фиг.3 - блок-схема приемника оптических сигналов 10;
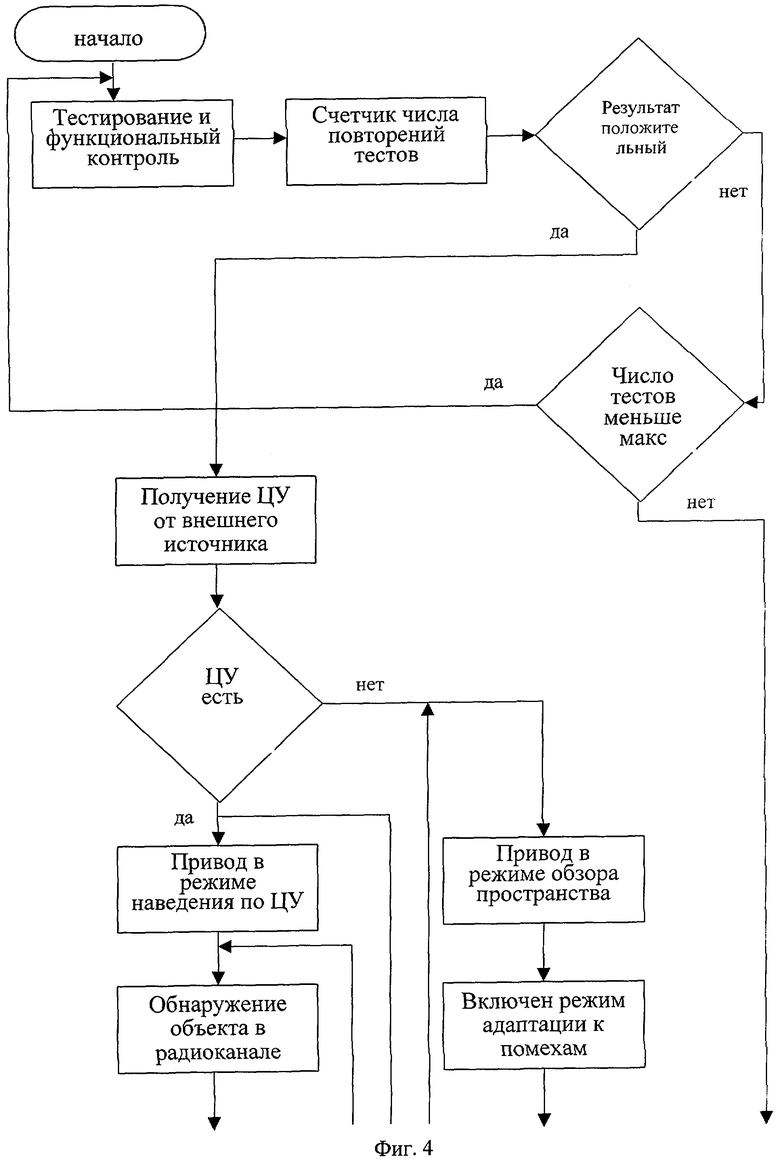
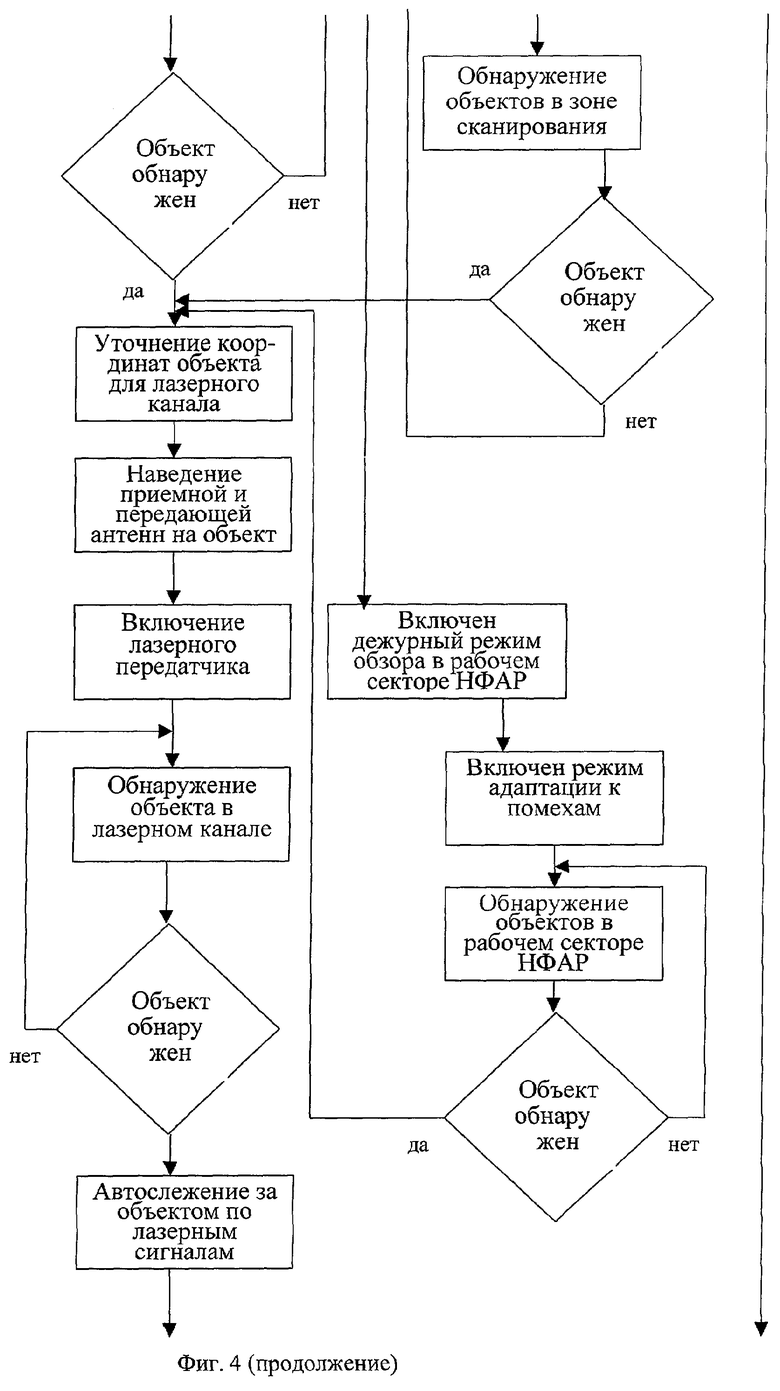
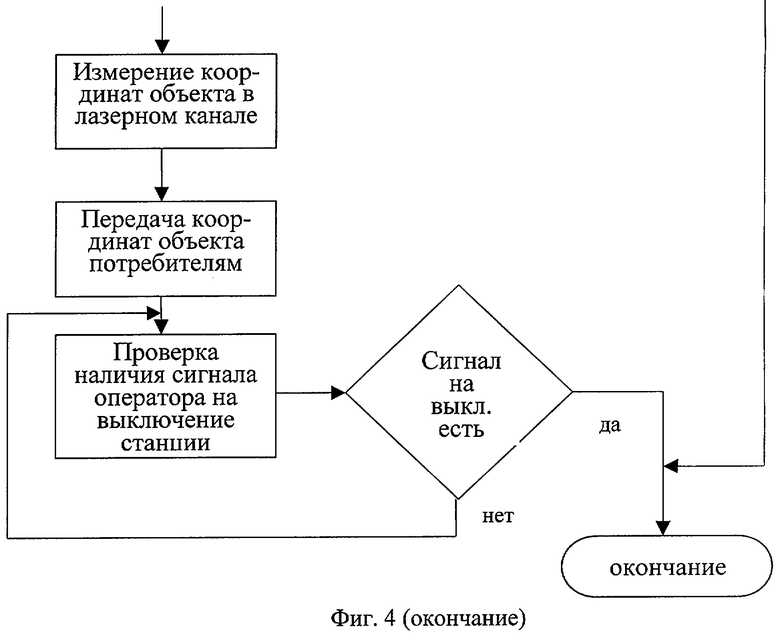
фиг.4 - укрупненая блок-схема алгоритма работы станции;
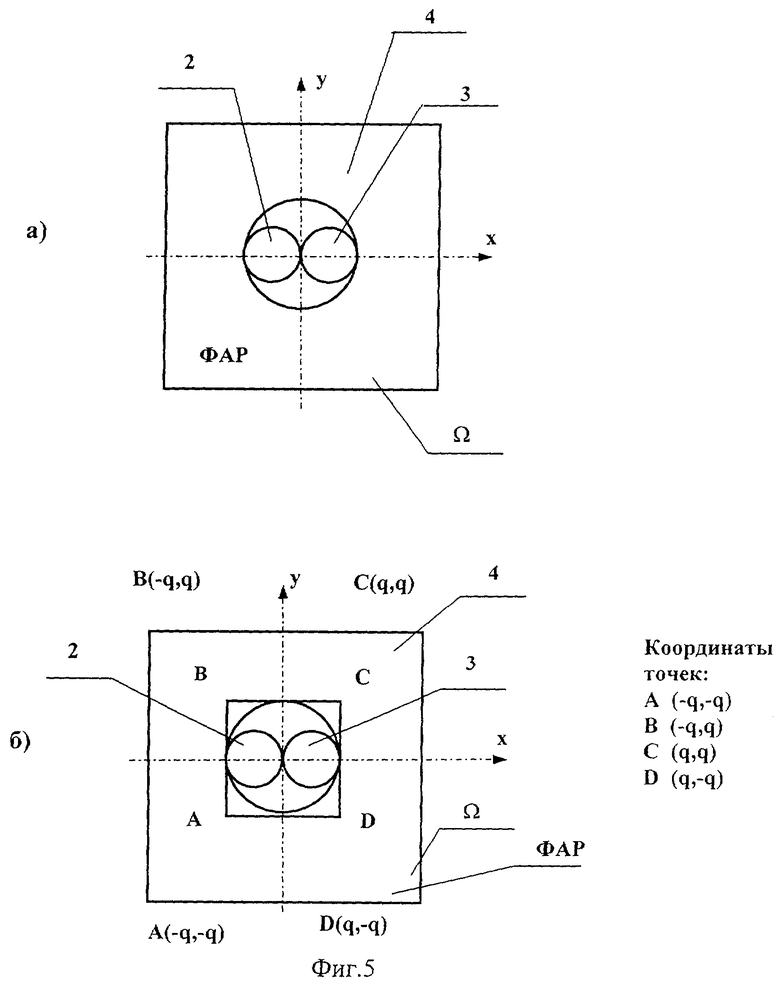
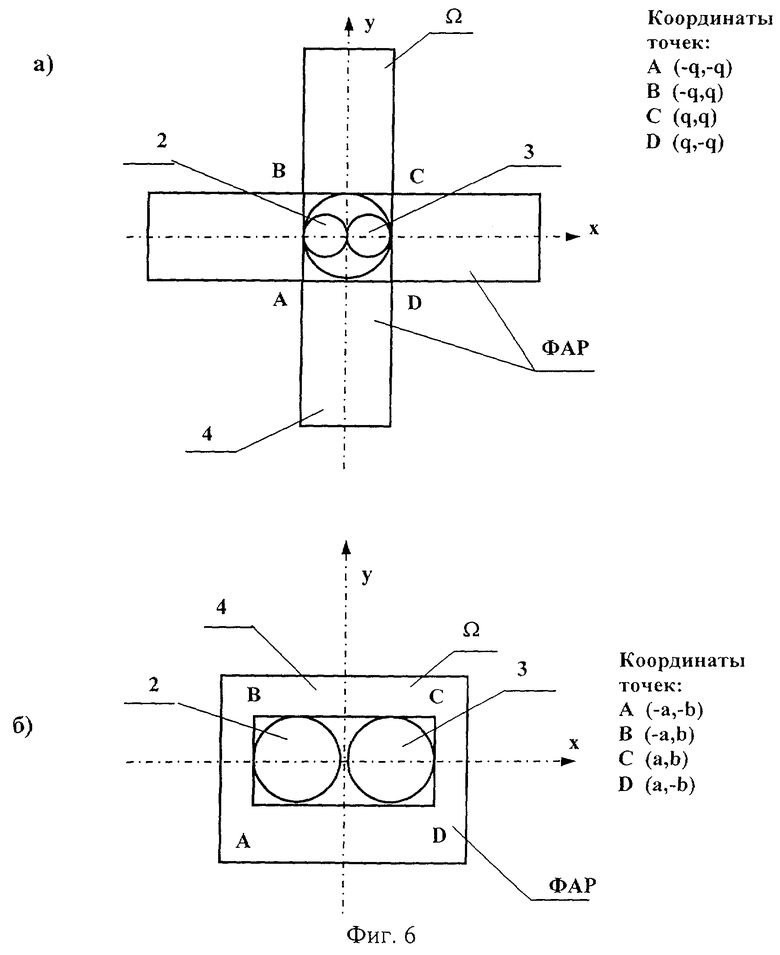
фиг.5, 6 и 7 - примеры конструктивной реализации и размещения в плоскости объединенного раскрыва приемопередающей радиоантенны и передающей и приемной оптической антенн.
Патентуемая лазерно-радиолокационная станция содержит (фиг.1) размещенные на опорно-поворотном устройстве 30 оптико-радиотехнический приемопередающий модуль 1, который, в свою очередь, содержит оптическую передающую антенну 2, оптическую приемную антенну 3, приемопередающую радиоантенну 4. На оси α опорно-поворотного устройства 30 установлен привод 5 для оси α и датчик 7 положения оси α, а на оси β опорно-поворотного устройства 30 установлены привод 6 для оси β и датчик 8 положения оси β.
На опорно-поворотном устройстве 30 в составе оптико-радиотехнического приемо-передающего модуля 1 станции (фиг.2) расположены лазерный передатчик 9, приемник оптического сигнала 10, диаграммообразующая схема 11, блок питания и управления лазерным передатчиком 12, блок первичной обработки принятых оптических сигналов 13, блок передающих модулей ФАР или НФАР 14, блок приемных модулей ФАР или НФАР 15, блок управления 16 приемопередающими радио и оптическими каналами, вращающееся контактное устройство (ВКУ) 27 (а, б), контрольно-юстировочная антенна 28 и приемопередающий блок контроля 29.
Станция содержит также блок вторичной обработки принятых оптических сигналов 17, блок вторичной обработки принятых радиосигналов 18, блок управления станцией 19, блок интерфейса с оператором станции 20, блок отображения информации станции 21, систему передачи информации внешним потребителям 22, блок интерфейса внешних целеуказателей 23, блок 24 управления приводом по оси α, блок 25 управления приводом по оси β и блок вторичного электропитания 26.
Патентуемая лазерно-радиолокационная станция в соответствии с разработанным техническим решением имеет следующую реализованную совокупность схемотехнических связей компонентов станции.
Размещенная на опорно-поворотном устройстве 30 передающая оптическая антенна 2 подключена к выходу лазерного передатчика 9, на входе которого установлен блок питания и управления лазерным передатчиком 12. Приемная оптическая антенна 3 подключена оптическим выходом к оптическому входу приемника оптических сигналов 10, многоразрядный выход которого подключен к многоразрядному входу блока первичной обработки принятых оптических сигналов 13. На оси α опорно-поворотного устройства 30 установлен привод 5 для оси α, первый вход которого подключен к выходу блока управления приводом 24 по оси α. На оси β опорно-поворотного устройства 30 установлен привод 6 для оси β, первый вход которого подключен к выходу блока управления приводом 25 по оси β.
На опорно-поворотном устройстве 30 размещены приемопередающая радио антенна 4, выход которой соединен с первым входом диаграммообразующей схемы ФАР или НФАР 11, первый и второй выходы которой подключены соответственно к входу приемопередающей радио антенны 4 и первому входу блока приемных модулей ФАР или НФАР 15. Второй вход диаграммообразующей схемы 11 соединен с выходом блока передающих модулей ФАР или НФАР 14, первый и второй входы которого подключен соответственно к первому и седьмому выходу, подвижной части вращающегося контактного устройства (ВКУ) 27а. Первый, второй, третий, четвертый, пятый и шестой выходы подвижной части ВКУ 27а подключены соответственно к второму входу приемопередающего блока контроля 29, к входу блока первичной обработки принятых оптических сигналов 13, к первому входу приемника оптических сигналов 10 и второму входу блока питания и управления лазерным передатчиком 12, к первому входу блока питания и управления лазерным передатчиком 12, второму входу приемника оптических сигналов 10, к третьему входу диаграммообразующей схемы 11 и второму входу блока приемных модулей ФАР или НФАР 15, третий вход которого подключен к седьмому выходу ВКУ 27а. Выход блока приемных модулей 15 подключен к первому входу подвижной части ВКУ 27а. Второй вход ВКУ 27а подключен к выходу приемопередающего блока контроля 29, первый вход которого соединен с выходом контрольно-юстировочной антенны 28. Первый, второй и третий многоразрядные входы подвижной части ВКУ 27а подключены соответственно к многоразрядному выходу датчика положения 8 оси β, многоразрядному выходу блока первичной обработки принятых оптических сигналов 13, и второму многоразрядному выходу неподвижной части вращающегося контактного устройства 27б, выход которого соединен с третьим входом подвижной части ВКУ 27а, многоразрядный выход которого соединен с первым многоразрядным входом неподвижной части ВКУ 27б. Первый многоразрядный выход ВКУ 27б подключен к первому многоразрядному входу блока управления приемопередающими радио и оптическими каналами 16.
Первый, второй и третий многоразрядные выходы блока управления 16 подключены соответственно к второму многоразрядному входу неподвижной части ВКУ 27б, многоразрядному входу блока вторичной обработки принятых радиосигналов 18 и многоразрядному входу блока вторичной обработки принятых оптических сигналов 17.
Первый и второй выходы блока управления приемопередающими радио и оптическими каналами 16 соединены соответственно с первым входом датчика 8 положения оси β и первым входом датчика положения 7 оси α.
Первый, второй, третий, четвертый и пятый многоразрядные входы блока управления станцией 19 подключены соответственно к многоразрядному выходу блока вторичной обработки принятых оптических сигналов 17, многоразрядному выходу блока интерфейса с оператором станции 20, к многоразрядному выходу блока вторичной обработки принятых радиосигналов 18, многоразрядному выходу датчика 7 положения оси α и многоразрядному выходу блока интерфейса внешних целеуказаний 23.
Первый, второй и третий многоразрядные выходы блока управления станцией 19 соединены соответственно с вторым многоразрядным входом блока управления приемопередающими радио и оптическими каналами 16, с многоразрядным входом блока передачи информации внешним потребителям 22 и мнооразрядным входом блока отображения информации станции 21. Первый и второй выходы блока управления станцией 19 подключены соответственно к первому входу блока управления приводом 25 по оси β и первому входу блока управления приводом 24 по оси α.
Первый, второй, третий и четвертый выходы блока вторичного электропитания 26 подключены соответственно к вторым входам привода 5 по оси α, блока управления приводом 24 по оси α и блока управления приводом 25 по оси β, к второму входу датчика 8 положения оси β, к входу неподвижной части ВКУ 27б, к вторым входам привода 6 для оси β и датчика 7 положения оси α, входу блока управления приемопередающими радио оптическими каналами 16, входу блока вторичной обработки принятых радиосигналов 18, входу блока управления станцией 19, входу блока 20 интерфейса с оператором станции, входу блока отображения информации станции 21, входу блока передачи информации внешним потребителям 22 и входу блока интерфейса внешних целеуказателей 23.
Оптическая передающая антенна 2 и лазерный передатчик 9 обеспечивают заданную угловую расходимость и энергию лазерного излучения, направляемого к объекту, и могут быть реализованы на основе известных устройств данного назначения, например, (см. книгу «Инфракрасные лазерные локационные системы»; авторы: Протопопов В.В., Устинов Н.Д. М.: Воениздат, 1987 г., стр. 45; S.G.Lambert, W.L.Casey Laser Communications in Space. Artech House, 1995, стр. 119-128).
Оптическая приемная антенна 3 и приемник оптических сигналов 10 осуществляют прием оптического сигнала, отраженного от объекта, и могут быть выполнены в виде стандартных узлов, применяемых при построении лазерных локационных станций. Конструктивно блок приемной оптики 3 может быть реализован в виде оптического объектива (см., например, S.G. Lambert, W.L. Casey Laser Communications in Space. Artech House, 1995. стр. 119-128). Приемник оптических сигналов 10 может быть реализован по блок-схеме фиг.3.
Приемопередающая радиоантенна 4 и диаграммообразующая схема 11 предназначены для излучения и приема зондирующих импульсов в радиодиапазоне. Радиоантенна 4 может быть выполнена, например, в виде фазированной антенной решетки (ФАР) или неэквидестантной ФАР, а диаграммообразующая схема 11 на основе волноводно-распределительного устройства с фазовращателями проходного типа (см. «Проектирование фазированных антенных решеток», под ред. Воскресенского Д.И.; изд-во «Радио и связь». М., 1981 г.).
Компоновочно-передающая оптическая антенна 2, приемная оптическая антенна 3, приемопередающая радиоантенна 4, лазерный передатчик 9 и приемник оптических сигналов 10 выполнены в виде единого объединенного модуля. Изобретение предусматривает различные варианты конструктивной реализации данного модуля. Возможные варианты компоновки плоской ФАР (или НФАР) и приемопередающей оптики многообразны и диктуются конкретными тактико-техническими требованиями и возможностями конструктивного размещения комплекса на подвижном средстве. При этом при выборе конкретного варианта реализации модуля необходимо обеспечивать минимальный разнос фазового центра радиоантенны и оптического центра приемной оптики. Предлагаемая методика совмещения оптического раскрыва с раскрывом радио-антенны носит универсальный характер и описывается ниже. Примеры построения совмещенной компоновки плоских ФАР или НФАР с приемопередающей оптикой приведены на фиг.5, 6 и 7.
Опорно-поворотное устройство 30 обеспечивает ориентацию плоскости раскрыва ФАР (или НФАР) в преимущественном направлении обзора пространства и может быть выполнено по традиционной азимутально-угломестной схеме, (см. книгу «Инфракрасные лазерные локационные системы»; авторы: Протопопов В.В., Устинов Н.Д. М.: Воениздат, 1987 г., стр. 78).
Блок 12 питания и управления лазерным передатчиком предназначен для обеспечения заданных пространственно-временных характеристик лазерного канала и выполнен по известной схемотехнике (см., например, Ежегодный Международный каталог оптоэлектронных приборов зарубежных фирм 2001 г. «Laser Focus World. Buyers Guide 2001 the Optoelectronics Industry Sourcebook». Vol.36).
Блок первичной обработки принятых оптических сигналов 13 осуществляет пространственно-временную фильтрацию принятого станцией лазерного сигнала, отраженного от объекта, и может быть реализован на современной элементной базе (ПЛИС-ов, ЦПОС и других стандартных микросхем), (см., например, информационные материалы ЗАО "Scan Engineering Telecom", Россия, г. Воронеж, а также информационные материалы ЗАО "Инструментальные системы", Россия, г.Москва).
Блок 14 передающих и блок 15 приемных модулей ФАР (или НФАР) осуществляют, соответственно, излучение зондирующих импульсов, прием и селекцию импульсов, рассеянных целью. Данные блоки могут быть выполнены в виде аналогичного назначения стандартных блоков РЛС, находящихся в эксплуатации в настоящее время.
Блок управления приемопередающими радио и оптическими каналами 16 обеспечивает программно-аппаратное управление режимами лазерного и радиоканалов и может быть реализован, например, на базе промышленного компьютера ADVANTECH (см., приложение, информационные материалы компании «ПРОСОФТ», Россия, г.Москва).
Блок вторичной обработки принятых оптических сигналов 17 и блок вторичной обработки принятых радиосигналов 18 осуществляют соответственно обнаружение и «завязку» траекторий объектов, находящихся в зоне действия станции и могут быть реализованы каждый в виде программно-управляемого процессора обработки сигналов (см., например, информационные материалы ЗАО "Инструментальные системы", Россия, г.Москва, модуль ADP101PCI, ADP6713PCI).
Блок управления станцией 19 обеспечивает управление режимами работы станции, обеспечивает взаимодействие двух каналов (лазерного и радио) и может быть реализован, например, на базе промышленного компьютера ADVANTECH (см., приложение, информационные материалы компании «ПРОСОФТ», Россия, г.Москва). Укрупненная блок-схема алгоритма работы станции приведена на фиг.4. Полное и подробное программное обеспечение для работы патентуемой ЛРЛС в различных режимах разработано заявителем и содержится в его технической документации.
Интерфейсы 20 и 23 обеспечивают соответственно возможность управления станции оператором и получение целеуказаний от любого внешнего источника и реализованы по известной схемотехнике цифровых устройств на базе микропроцессоров.
Блок отображения информации станции 21 предназначен для вывода оператору станции информации о задействованных режимах работы станции, измеряемой координатной информации об объектах в зоне действия станции и может быть реализован в виде стандартного монитора персональной ЭВМ и печатающего устройства.
Блок передачи информации внешним потребителям 22 обеспечивает формирование цифровых сигналов, несущих информацию об измеренных координатах объектов в зоне действия станции, а также любой служебной информации о работе станции, представляющей интерес потребителю, и может быть выполнена по известной схемотехнике цифровых устройств (например, Ступин Ю.В. Методы автоматизации физических экспериментов и установок на основе ЭВМ. - М.: Энергоатомиздат, 1983, - 288 с.).
Блок 24 управления приводом по оси α и блок 25 управления приводом по оси β осуществляют поворот опорно-поворотного устройства 30 соответственно по двум осям и наведение лазерного и радиолучей на объект измерения. В качестве приводов 24 и 25 могут быть применены стандартные редукторные или безредукторные приводы (см., например, Цаценкин В.К. «Безредукторный автоматизированный электропривод с вентильными двигателями». М.: Изд-во МЭИ, 1991 г.).
Блок вторичного электропитания 26 необходим для выработки и подачи на все другие блоки и узлы станции требуемых питающих напряжений и может быть реализован по стандартной схемотехнике блоков вторичного электропитания, широкий набор таких блоков питания поставляется отечественными и зарубежными производителями (см., например, каталог компании «ПРОСОФТ», Россия, г.Москва).
Блок вращающегося контактного устройства (ВКУ) выполнен в виде двух частей, одна часть которого 27а расположена на опорно-поворотном устройстве 30 (подвижная часть ВКУ), а другая - 27б (неподвижная часть ВКУ) - на неподвижной части станции. Блок вращающегося контактного устройства (27а, б) необходим, для обеспечения передачи информационных сигналов, команд и питания между подвижной и неподвижной частями станции и представляет стандартное устройство, широко применяемое в радиолокационных станциях, конструкция которых предусматривает поворот радиоантенны в широком диапазоне углов. Конструктивное исполнение ВКУ стандартное и хорошо известное (см., например, «Справочник по радиолокации»; т.4 «Радиолокационные станции и системы». М.: Советское радио, 1978 г.).
Блоки 28 и 29 соответственно контрольно-юстировочная радиоантенна и приемо-передающий блок контроля радиоканала необходимы для тестовой проверки параметров аппаратуры радиоканала после развертывания станции на рабочей позиции и представляет из себя стандартное приемо-передающее радиолокационное устройство (см., например, «Справочник по радиолокации»; т.4 «Радиолокационные станции и системы». М.: Советское радио, 1978 г.).
Патентуемая лазерно-радиолокационная станция является двухканальным локационным комплексом. Первый информационно-измерительный канал осуществляет радиолокационное обнаружение, слежение и сопровождение объекта и тем самым обеспечивает уточненное целеуказание для второго информационно-измерительного канала и включает блоки 4, 11, 14, 15. Второй информационно-измерительный канал осуществляет лазерную (оптическую) локацию подвижного объекта, обеспечивая высокоточные координатные измерения и включает блоки 2, 3, 9, 10, 12, 13, при этом остальные блоки в соответствии с фиг.1,2 - общие для обоих каналов.
Авторами настоящего изобретения найдены и реализованы новые компоновочные, схемотехнические и алгоритмические решения, которые позволяют на качественно новом уровне организовать работу лазерно-радиолокационной станции.
Установлено, что при симметричном расположении приемопередающей оптики ЛЛС в раскрыве антенного полотна достигается совмещение оптической и радиотехнической осей систем и устраняются недостатки, присущие существующему пространственно, разнесенному варианту РЛС и ЛС. Однако такое совмещение станций, использующих различные физические принципы локации, не является чисто механическим объединением систем, так как в зависимости от геометрии и формы объединенного раскрыва существенным образом изменяются не только алгоритмы управления лучом ФАР и алгоритмы определения угловых координат целей, но и геометрия используемой антенной системы. Например, при использовании неэквидистантных ФАР (НФАР), имеющих ряд преимуществ перед эквидистантными решетками в части широкополосности, возможности сокращения числа элементов при сохранении разрешающей способности, меняется внутренняя структура НФАР, определяемая законом расстановки элементов в раскрыве (см. Гусевский В.И. «Метод апертурных ортогональных полиномов и его применение в антенной технике» - Зарубежная радиоэлектроника 2001 г., №3, с.50-72).
Это утверждение с очевидностью вытекает из рассмотрения четырех вариантов расположения ЛС в пределах плоского антенного раскрыва - Ω, (см. фиг.5, 6).
Установлено, что для всех вариантов объединенных антенных раскрывов формулы для определения ортогональных полиномов оказываются различными. В соответствии с методом апертурных ортогональных полиномов (АОП) алгоритмы фазирования антенных элементов ФАР, обеспечивающие наведение главного лепестка диаграммы направленности (ДН) в заданное направление, определение угловых координат цели либо по принципу равносигнальной зоны, либо с использованием моноимпульсного метода с одновременной пространственной фильтрацией сигналов и помех путем формирования глубоких провалов в ДН в направлениях прихода помех определяются конкретной геометрией и формой раскрыва, а также амплитудно-фазовым распределением поля в пределах антенного полотна.
Процедура построения алгоритмов фазирования связана с нахождением последовательности двумерных апертурных ортогональных полиномов (см. Гусевский В.И. «Метод апертурных ортогональных полиномов и его применение в антенной технике»). Синтезируемое фазовое распределение представляется отрезком двумерного обобщенного ряда Фурье по таким полиномам. В этом случае гармоники первого порядка ряда Фурье несут ответственность за ориентацию главного лепестка ДН в некотором направлении по критерию наилучшего среднеквадратичного приближения к фазовому распределению поля в раскрыве ФАР с учетом амплитудного распределения и формы раскрыва, а высшие гармоники ряда Фурье влияют в основном на структуру боковых лепестков и форму главного лепестка ДН.
Так как первые гармоники ряда Фурье ортогональны сумме всех высших гармоник, то при адаптивной вариации коэффициентами Фурье высших гармоник ориентация главного лепестка ДН и его форма остаются неизменными, если норма фазовых искажений, определяемых высшими гармониками, не превышает заданной величины..
Выборка номеров высших гармоник в процессе управления и адаптации осуществляется по критерию качества подавления помеховых сигналов с обеспечением минимального снижения коэффициента усиления в главном направлении путем минимизации следующего функционала:

где Сnm, - коэффициенты Фурье высших гармоник,
λk - множитель Лагранжа,
(θk,λk) - направления формирования провалов в ДН,
N1,N2 - число элементов в строке и в столбце, соответственно.
Функция фазирования Ф(х,у), обеспечивающая ориентацию луча в заданном направлении - (θ0,ϕ0), определяется из системы уравнений

где θ0,ϕ0 - углы линии визирования в сферической системе координат, полярная ось которой совпадает с нормалью к общему центру антенного и оптического раскрывов,
cosγх, cosγу - направляющие косинусы линии визирования,
α11, b01, b11 - коэффициенты апертурных ортогональных полиномов первого порядка,
C10,C01 - коэффициенты Фурье, причем,

p10(х,у)=α11х+α10, p01(х,у)=b11у+b01х+b10
где, в свою очередь,
Ω - область объединенного плоского антенного и оптического раскрывов,
2l - максимальный диаметр области Ω,
 - волновое число,
- волновое число,
ρ(х,у) - известная функция амплитудного распределения поля в пределах всей области Ω,
Ф(х,у) - искомая функция фазирования.
Следует заметить, что в пределах плоской области, занятой оптическими раскрывами (объективами) ρ(х,у)→0.
Интегралы в (3) понимаются в смысле Римана-Стильтьеса и применимы к дискретно-точечным амплитудным распределениям с ненулевой мерой, то есть допускается обобщение алгоритмов на точечные дискретные источники.
Практическое определение функции Ф(х,у) в условиях дискретного фазирования производится путем подстановки в (3) дискретизированной функции  , являющейся равномерным приближением к точному закону фазирования:
, являющейся равномерным приближением к точному закону фазирования:

которая определена на части области Ω1⊂ Ω таким образом, чтобы искомые корректирующие фазовые подставки на оставшейся области Δ Ω= Ω/ Ω1, обеспечивали наилучшее среднеквадратичное приближение к точному закону (4) в соответствии с уравнениями (2). Отсюда следует, например, что для объединенного раскрыва (фиг.5б) при равномерном амплитудном распределении ортогональные полиномы первого порядка имеют вид:

Для раскрыва, изображенного на фиг.8а, коэффициенты для ортогональных полиномов первого порядка существенно другие:

Совпадение коэффициентов p10 и p01 полиномов объясняется симметричной структурой объединенного раскрыва.
Для раскрыва, представленного на фиг.6б, ортогональные полиномы первых порядков имеют вид

Во всех приведенных случаях коэффициенты ортогональных полиномов высших порядков для раскрывов фиг.5б и фиг.6а, 6б имеют различные выражения.
Объединенный раскрыв ФАР РЛС (с увеличенным числом антенных панелей) с приемопередающей оптикой может иметь вид, показанный на фиг.7
Такая конструкция позволяет получить более высокий коэффициент усиления антенны РЛС, но при этом необходимо использовать для алгоритмов управления новый набор ортогональных полиномов, существенно отличающихся от полиномов для первых вариантов раскрывов.
В режиме измерения угловых координат цели по принципу равносигнальной зоны или с использованием моноимпульсного метода определение угловых координат цели также осуществляется с помощью выражений (2). Но в этом случае информация о фактических амплитудных и фазовых состояниях всех элементов ФАР, при которых формируются суммарные и разностные диаграммы направленности, передается из блока управления фазовращателями в процессор, где и вычисляются координаты цели, находящейся в равносигнальном направлении. То есть, обработка угловой информации в любом случае осуществляется на основе известных выражений для ортогональных полиномов первых порядков. При воздействии помеховых сигналов, приходящих по боковым лепесткам ДН ФАР, в РЛС используются адаптивные алгоритмы управления, также опирающиеся на метод апертурных ортогональных полиномов, зависящих от геометрии объединенного антенного и оптического раскрыва.
В этом случае функции фазирования определяются следующими выражениями:

где [·] - оператор выделения целой части,
ΔФmin - минимальный дискрет фазирования,
А0(х,у)=с10p01(х,у)+c01p01(х,у) - аддитивная линейная часть функции фазирования, обеспечивающая ориентацию луча ФАР в заданном направлении,
 - аддитивная нелинейная часть функции фазирования, ответственная за формирование глубоких провалов в ДН ФАР в направлениях прихода помех,
- аддитивная нелинейная часть функции фазирования, ответственная за формирование глубоких провалов в ДН ФАР в направлениях прихода помех,
cnm - коэффициенты Фурье высших гармоник,
pnm - полиномы высших порядков. При этом А0(х,у) и B(x,y,N1,N2) - функции ортогональны на объединенном антенном раскрыве Ω с весовой функцией - результирующим амплитудным распределением - так, что

Условие (9) означает, что при вариации коэффициентами Фурье высших гармоник, ориентация эквивалентного линейного фазового фронта вблизи раскрыва антенны остается неизменной и направления главного лепестка ДН в заданном направлении сохраняется.
Как было показано выше, даже при равномерном амплитудном распределении выражения для ортогональных полиномов первого порядка оказываются различными при различной геометрии раскрывов антенной системы ЛЛС. Этот метод справедлив и в том случае, если антенная система РЛС представляет собой разреженную неэквидистантную фазированную антенную решетку (НФАР). Для нее вид весовой функции должен учитывать характер распределения поля в пределах отдельного антенного элемента и всего раскрыва.
где U(хq,yq) - означает окрестность точки размещения антенного элемента,
αq - функция, описывающая амплитудное распределение поля в раскрыве антенного элемента,
М - число элементов НФАР, причем должно выполняться условие

Законы расстановки антенных элементов, образующих в совокупности НФАР, определяются положением корней ортогональных полиномов на плоском антенном раскрыве, либо положением экстремальных точек произведений ортогональных полиномов на функцию амплитудного распределения поля в пределах всего раскрыва, (см. Гусевский В.И. «Метод апертурных ортогональных полиномов»...). Отсюда следует, что, например, для каждого объединенного антенного раскрыва, совмещенного с приемопередающей оптикой (фиг.5а, б и фиг.6а, б), внутренняя геометрия неэквидистантной ФАР, определяемая законом расстановки элементов, оказывается различной, что обуславливает потенциальное многообразие последующих конструктивных реализации.
Анализ потенциальных технических и эксплуатационных характеристик комбинированного радиотехнического и оптического угломерно-дальномерного локатора показал преимущество построения объединенного раскрыва системы в форме, представленной на фиг.6а.
В этом варианте проще решается проблема построения мобильной системы, так как антенная решетка представляет собой четыре плоские раскрывающиеся прямоугольные панели, которые в транспортном положении могут складываться вдоль цилиндрической конструкции лазерного передатчика.
Патентуемая лазерно-радиолокационная станция работает следующим образом.
После развертывания ЛРЛС на позиции осуществляют тестирование и функциональный контроль узлов и блоков станции и проверку ее готовности к работе (фиг.4). Для этого оператор с помощью пульта управления станцией 19 и специализированного программно-алгоритмического обеспечения (ПАО) дает команду на проведение серии тестов, которые включают в себя проверку работоспособности всех подсистем, узлов и блоков станции, определяя при этом значения ключевых для работоспособности ЛРЛС технических характеристик блоков. Для тестирования и функционального контроля радиоканала с НФАР используются контрольно-юстировочная антенна 28 и приемопередающий блок контроля радиоканала 29 (фиг.1), которые в штатных режимах работы ЛРЛС не задействованы. Для тестирования и функционального контроля лазерного канала используются штатные блоки и узлы. При положительном результате тестирования станция переходит в режим приема целеуказаний.
Внешние целеуказания принимаются через блок 23 и далее через пульт управления станцией 19 передаются в блок 16, в котором вырабатываются сигналы управления приемопередающими радио и оптическими каналами. При наличии целеуказаний привод станции переводится в режим наведения на объект по целеуказаниям (ЦУ) и работа станции аналогична нижеописанному режиму в отсутствие ЦУ с вполне очевидными изменениями.
При отсутствии ЦУ двухосный электромеханический привод станции переводится в режим обзора пространства.
При этом для обеспечения скрытности работы станции и устойчивости к средствам противодействия со стороны лоцируемого объекта ее конструкцией, алгоритмом работы и специализированным программно-алгоритмическим обеспечением (ПАО) предусмотрены следующие меры:
- при излучении радиоканала в эфир осуществляют перестройку в широкой полосе (около октавы) несущей частоты приемопередающей радиоантенны 4 по случайному закону, для чего на блок 14 подаются команды из блока 16;
- с помощью специализированного ПАО осуществляют также адаптивную настройку «нулей» диаграммы направленности в направлении источника помех или средств поражения ЛРЛС, например противорадиолокационных ракет с головкой самонаведения.
При отсутствии ЦУ объединенный антенный раскрыв, состоящий из оптической передающей антенны 2, оптической приемной антенны 3 и приемопередающей радиоантенны 4 на базе, например, неэквидистантной фазированной антенной решетки (НФАР), размещенные на общем для них опорно-поворотном устройстве 30 (фиг.1, 2), с помощью двухосного электромеханического привода 5, 6 осуществляет сканирование верхней полусферы пространства. В блоке передающих модулей НФАР 14 формируется радиосигнал, который через диаграммо-образующую схему НФАР 11 и приемопередающую радиоантенну 4 посылается в сканируемое пространство. При наличии в сканируемой зоне объекта отраженный от него сигнал принимается той же приемопередающей радиоантенной 4 и через блок 11 передается в блок первичной обработки принятых радиосигналов 15, в котором осуществляется обнаружение радиосигнала на фоне шумов и преднамеренных помех при достаточной энергии принятого сигнала. Обнаруженный радиосигнал свидетельствует об обнаружении объекта в зоне сканирования. Отфильтрованный сигнал поступает в блок вторичной обработки принятых радиосигналов 18 и затем в блок управления станцией 19, на который поступают также сигналы с датчиков угол-код каждой из осей поворота 7, 8.
В блоке управления станцией 19 формируются данные об измеренных радиоканалом координатах обнаруженного объекта. Измеренные координаты используются в блоках 16 и 19 для перевода радиолокационной части станции в режим автослежения, а также передаются в качестве уточненных ЦУ в лазерную часть станции. По этим уточненным ЦУ осуществляется наведение приемной 3 и передающей 2 оптических антенн на объект аналогично описанному выше, включается лазерный передатчик 9, сигнал лазерного передатчика через оптическую передающую антенну 2 посылается к объекту, отраженный от объекта лазерный сигнал принимается оптической приемной антенной 3 и поступает на приемник оптических сигналов 10 (фиг.1, 2, 3) и далее в блок первичной обработки принятых оптических сигналов 13, в которых осуществляется фильтрация сигнала и выделение его на фоне шумов. Отфильтрованный оптический сигнал поступает в блок вторичной обработки принятых оптических сигналов 17 и затем в блок управления станцией 19, в которых реализуется алгоритм высокоточного определения координат объекта. Координаты объекта, измеренные лазерным каналом, в приоритетном порядке используются для автослежения за объектом, при пропадании сигналов в лазерной части станции автослежение передается радиоканалу, при пропадании сигналов в радиоканале станция переходит в режим обзора пространства. Все эти режимы предусмотрены специализированным программно-алгоритмическим обеспечением, имеющемся в пульте управления станцией 19. Координаты объекта, измеренные лазерным каналом, передаются потребителям информации через систему передачи информации внешним потребителям 22.
При автослежении по данным лазерного канала нормаль к плоскости антенного раскрыва ЛРЛС следит за объектом, при этом радиоканал переводится в дежурный режим обзора с помощью электронного сканирования лучом в рабочем секторе НФАР, который представляет собой конус раскрывом ±45° с нормалью к плоскости антенного раскрыва в качестве центральной оси. При дежурном режиме обзора производится обнаружение объектов радиоканалом аналогично вышесказанному. Обнаруженные при этом объекты ставятся в очередь на обслуживание лазерным каналом. Приоритет в этой очереди определяется оператором станции командами, передаваемыми через блок управления станцией 19.
Выключение станции производится по сигналу оператора с пульта блока управления станцией 19, либо по сигналу об отрицательном прохождении тестового и функционального контроля.
Заявителем были проведены исследования аппаратной реализации настоящего изобретения в виде исследований основных узлов и блоков, которые подтвердили эффективность разработанного технического решения.
Моделирование и эксперимент показали, что данное изобретение позволяет создать современную мобильную и компактную лазерно-радиолокационную станцию, обеспечивающую точность измерения трех координат объекта на хуже 10 см каждую, время развертывания в штатный режим работы до 5 минут, которая имеет эффективную систему защиты от обнаружения ее работы в эфире.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНАЯ СИСТЕМА ЗАЩИТЫ СТАНЦИЙ С ЗЕРКАЛЬНО-ПАРАБОЛИЧЕСКИМИ АНТЕННАМИ ОТ ВОЗДЕЙСТВИЯ ПОМЕХОВЫХ СИГНАЛОВ И СПОСОБ ЕЕ ПОСТРОЕНИЯ | 2006 |
|
RU2311708C1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
| СПОСОБ ФОРМИРОВАНИЯ И УСТРОЙСТВО МАЛОГАБАРИТНОЙ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ РЛС С УПРАВЛЯЕМОЙ ПО ШИРИНЕ ДИАГРАММОЙ НАПРАВЛЕННОСТИ | 2000 |
|
RU2183891C2 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| ПЕРЕДАЮЩАЯ СИСТЕМА ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2005 |
|
RU2295738C1 |
| СПОСОБ НАСТРОЙКИ УГЛОВОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2002 |
|
RU2208810C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ И РАЗВЕДЫВАТЕЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2002 |
|
RU2205418C1 |

Изобретение относится к оптико-радиолокационным устройствам и может быть использовано в высокоточных локационных комплексах для наведения лазерного излучения на наблюдаемые подвижные воздушные и космические объекты, для обнаружения и определения параметров (координат) движения удаленных объектов. Техническим результатом является обнаружение, захват и сопровождение подвижной цели, а также лазерная локация подвижной цели, обеспечение высокой точности измерения координат различных летательных и движущихся целей, сокращение времени предварительного целеуказания для лазерного канала и тем самым уменьшение времени поиска, обнаружения и захвата на автосопровождение обнаруженной цели, сокращение времени развертывания комплекса и приведения его в рабочую готовность, обеспечение скрытности работы комплекса. Лазерно-радиолокационная станция содержит размещенные на опорно-поворотном устройстве оптико-радиотехнический приемопередающий модуль, который содержит оптическую передающую антенну, оптическую приемную антенну, приемопередающую радиоантенну, на оси α опорно-поворотного устройства установлен привод для оси α и датчик положения оси α, на оси β опорно-поворотного устройства установлены привод для оси β и датчик положения оси β, на опорно-поворотном устройстве расположены лазерный передатчик, приемник оптического сигнала, диаграммообразующая схема, блок питания и управления лазерным передатчиком, блок первичной обработки принятых оптических сигналов, блок передающих модулей ФАР или НФАР, блок приемных модулей ФАР или НФАР, блок управления приемопередающими радио и оптическими каналами, вращающееся контактное устройство (ВКУ), контрольно-юстировочная антенна, приемопередающий блок контроля, блок вторичной обработки принятых оптических сигналов, блок вторичной обработки принятых радиосигналов, блок управления станцией, блок интерфейса с оператором станции, блок отображения информации станции, систему передачи информации внешним потребителям, блок интерфейса внешних целеуказателей, блок управления приводом по оси α, блок управления приводом по оси β и блок вторичного электропитания. 3 з.п. ф-лы, 7 ил.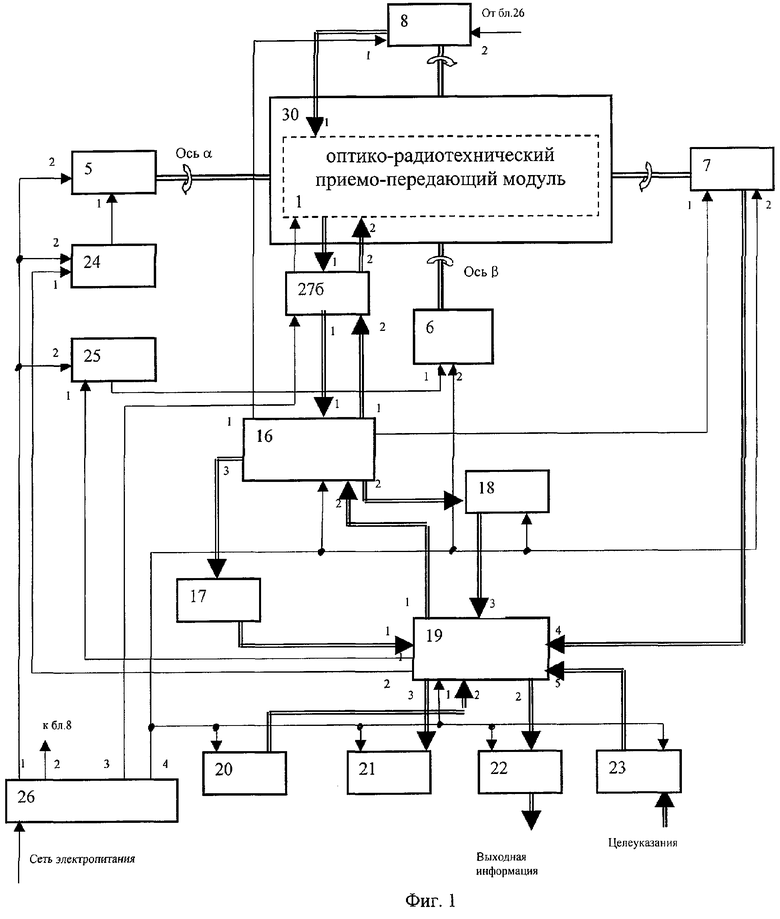
| СПУТНИКОВАЯ ЛАЗЕРНАЯ ДАЛЬНОМЕРНАЯ СИСТЕМА | 1992 |
|
RU2037849C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР | 1991 |
|
RU2028645C1 |
| US 5953110 A, 14.09.1999 | |||
| DE 19724080 A1, 10.12.1998 | |||
| US 4615496 A, 07.10.1986 | |||
| US 5220328 A, 15.06.1993. | |||

