Изобретение относится к медицинской технике, конкретно к приспособлениям для сборки, установки и проверки протезов нижних конечностей.
Известно устройство для подбора параметров протеза нижней конечности [1] содержащее основание со стойками, подъемный механизм, фиксатор гильзы, измеритель нагрузки и регулировочный узел. При проведении примерки инвалида устанавливают на основание, при этом он опирается на стойку. С помощью регулировочного узла и подъемного механизма устанавливают оптимальное пространственное положение манжетки бедра по угловым параметрам в сагиттальной и фронтальной плоскостях.
Данное устройство используется только для определения трофики ткани культи путем дозированного распределения нагрузки на протез между приемником и манжеткой бедра, при этом давление на опору измеряется только в одном режиме без выбора оптимальных соотношений между положением стоп на опоре и нагрузкой.
За наиболее близкий аналог принято устройство для определения технологической базы гильз протезов нижних конечностей [2] содержащее протез-прибор с механизмом линейной регулировки протез-прибора в горизонтальной плоскости в двух взаимно перпендикулярных направлениях и два основания, одно из которых снабжено приводом вертикального перемещения с датчиком перемещения и соединено с платформой, выполненной в виде двух жестко соединенных друг с другом пластин, нижней и верхней, между которыми установлены датчики контроля силовой нагрузки, соединенные попарно по полумостовой схеме и подключенные к индикаторам. Регулируя высоту установки кронштейна приводом вертикального перемещения, добиваются, чтобы нагрузка на гильзу протеза составляла 50% от веса инвалида.
Посредством механизма линейной регулировки ориентируют основание, на котором установлена гильза, во фронтальной и сигиттальной плоскостях до установки на индикаторах нулевых показаний. При этом определяется местоположение гильзы относительно геометрического центра.
Это известное устройство используется только для нанесения технологических линий протеза бедра и не дает информации о распределении давления по опорной поверхности, о перемещении общего центра масс (ОЦМ) в горизонтальной плоскости, о наклоне гильзы в пространстве, о величине перекоса таза. Без этих факторов не представляется возможным оценить схему построения протеза и соответственно обеспечить точность сборки протеза.
Техническим результатом изобретения является повышение точности сборки протеза, ускорение процесса подгонки протеза и возможность точного воспроизводства схемы построения протеза при повторном протезировании путем оптимизации схемы построения протезом как голени, так и бедра.
Для этого в известное устройство для подбора параметров протеза нижней конечности, содержащее протез-прибор с механизмом линейной регулировки протез-прибора в горизонтальной плоскости в двух взаимно перпендикулярных направлениях, и неподвижное основание и основание, которое снабжено приводом вертикального перемещения с датчиком перемещения и соединено с платформой, выполненной в виде жестко соединенных друг с другом пластин, нижней и верхней, между которыми установлены датчики контроля силовой нагрузки, предложено ввести механизм независимой угловой регулировки протез-прибор в двух плоскостях, перпендикулярных друг к другу и к горизонтальной плоскости, датчик углового положения приемной гильзы протеза, устанавливаемой на гильзе протеза, вторую платформу, аналогичную упомянутой и соединенную с ней неподвижным основанием, ортопедический пояс с датчиком измерения перекоса таза, установленном на инвалиде. Механизм регулировки протез-прибора в горизонтальной плоскости содержит датчик линейных перемещений, включающий в конструкцию протез-прибора, который дополнительно содержит трубку голени и искусственную стопу. Платформы закреплены на основании с возможностью углового перемещения вокруг вертикальной оси платформы, расположенной в области проецирования пяточного бугра.
Механизм угловой регулировки протез-прибора выполнен в виде трех обойм, последовательно входящих одна в другую наружной, промежуточной и внутренней, имеющей полость для размещения приемной гильзы. Промежуточную обойму устанавливают с возможностью углового перемещения в одной из взаимно перпендикулярных плоскостей относительно внешней обоймы, а внутреннюю обойму с возможностью углового перемещения в другой плоскости относительно промежуточной обоймы. Механизм линейной регулировки протез-прибора в горизонтальной плоскости выполняют из трех плит, размещенных последовательно одна на другой нижней, средней и верхней, нижнюю жестко соединяют с трубкой голени, на верхней плите жестко закрепляют наружную обойму механизма независимой угловой регулировки протез-прибора. При этом верхнюю плиту устанавливают с возможностью перемещения относительно средней, а среднюю с возможностью перемещения относительно нижней плиты.
Возможность углового перемещения промежуточной обоймы относительно наружной может быть осуществлена путем установки двух пар штырей, расположенных во взаимно перпендикулярных плоскостях, одна из которых размещена на внутренней поверхности промежуточной обоймы, а другая на наружной ее поверхности, и выполнения во внутренней и наружной обоймах ответных пазов, протяженных вдоль направляющей сферы. При этом механизм угловой регулировки предложено снабдить фиксирующим устройством, состоящим из хомута и хвостовика, имеющего сферическую головку, сопряженную с внутренней обоймой, а в основании наружной выполнить пазы, в которые входят фиксаторы хвостовика для фиксации хомутом выбранного углового положения.
Возможность перемещения верхней плиты относительно средней, а средней относительно нижней плиты предусмотрено осуществить путем установки направляющих на верхней и нижней плоскостях средней плиты, перпендикулярного расположения направляющих верхней плоскости относительно направляющих нижней плоскости и их зацепления с соответствующими направляющими в верхней и нижней плитах, при этом каждая из последних соединена со средней плитой винтовым соединением. На платформах изображены контуры стоп и датчики контроля силовой нагрузки установлены по контуру стопы в области проецирования пяточного бугра, первой и пятой плюсневых костей.
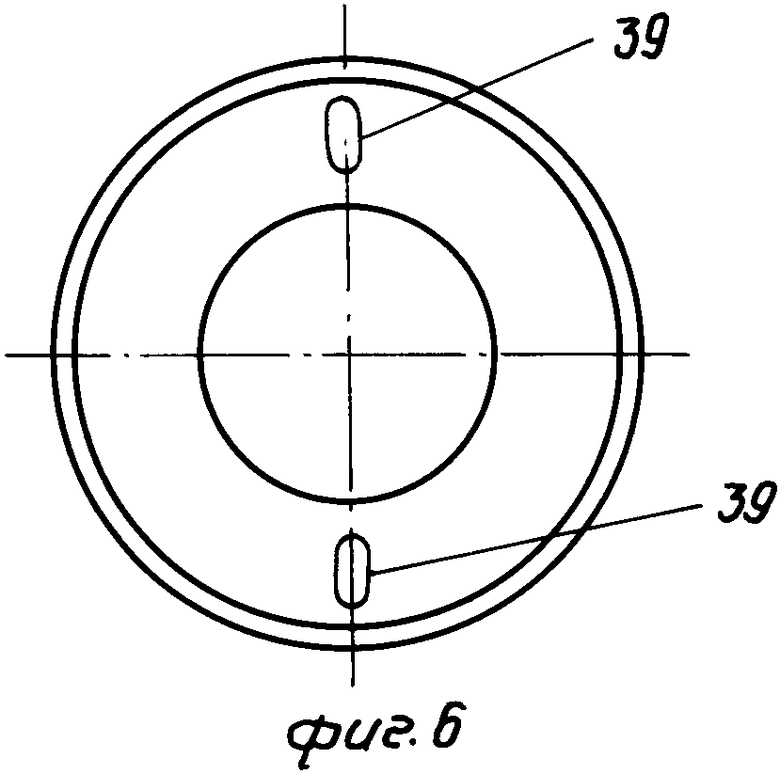
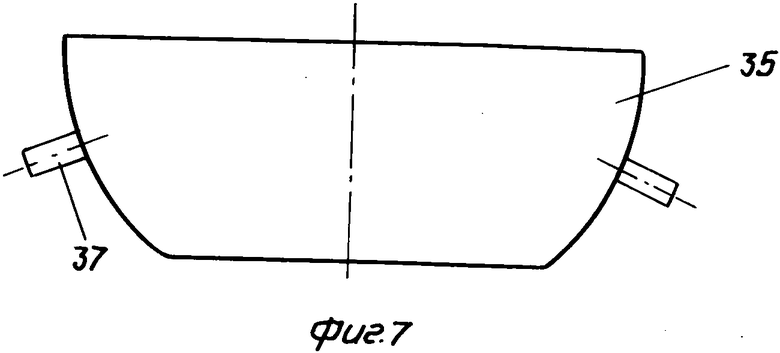
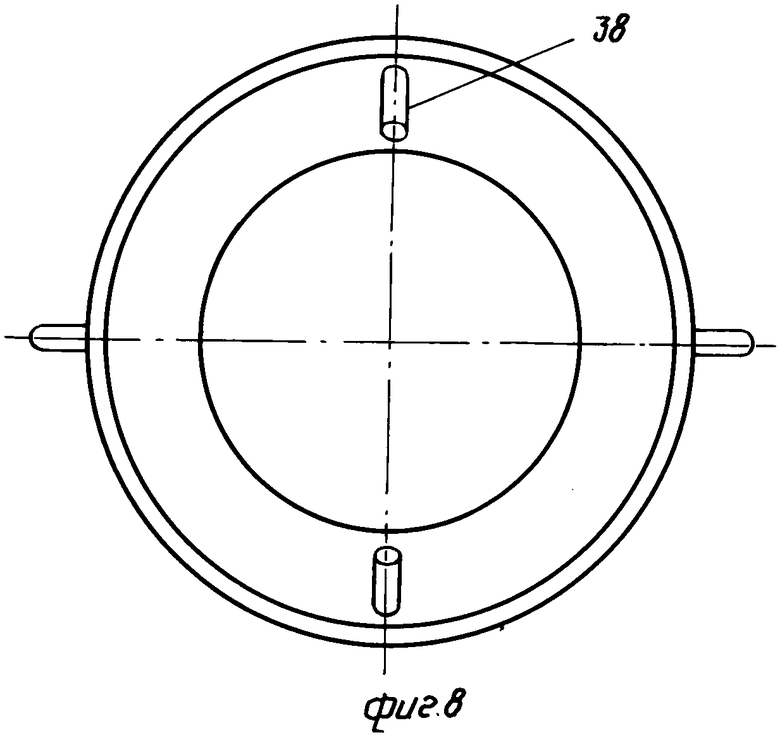
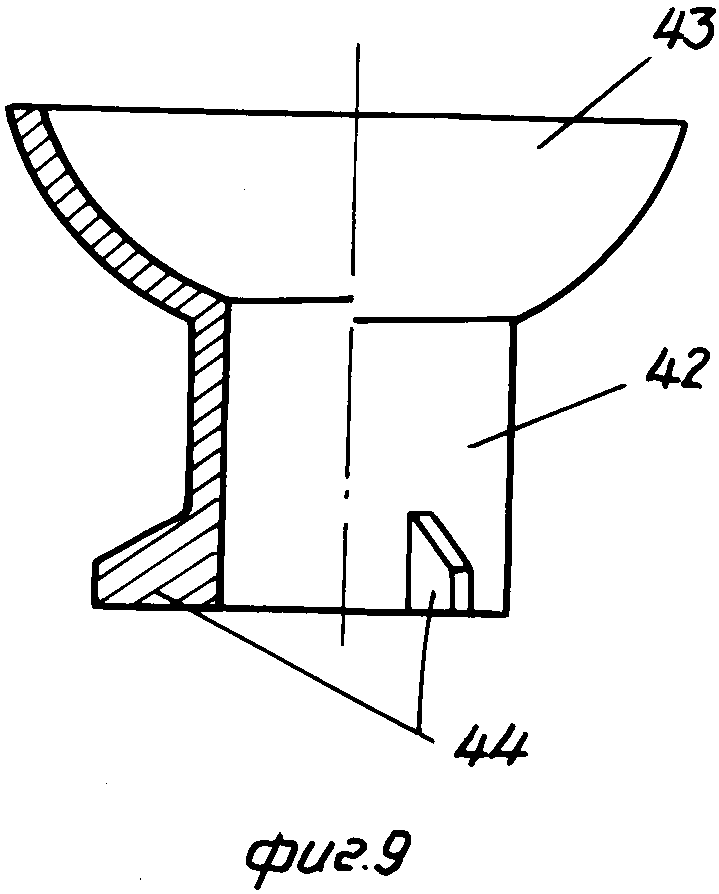
На фиг. 1 показано устройство для подбора параметров протеза нижней конечности, общий вид; на фиг. 2 то же, план; на фиг. 3 то же, вид сбоку; на фиг. 4 механизм угловой и линейной регулировки протез-прибора, общий вид; на фиг. 5 внутренняя обойма механизма угловой регулировки протез-прибора; на фиг. 6 то же, план; на фиг. 7 промежуточная обойма механизма угловой регулировки протез-прибора; на фиг. 8 то же, план; на фиг. 9 хвостовик.
Устройство для подбора параметров протеза нижней конечности содержит корпус 1, в котором размещены два основания: дополнительное основание 2, соединенное с приводом 3 вертикального перемещения и с датчиком 4 величины вертикального перемещения, и основание 5, соединенное с приводом 6 горизонтального перемещения и с датчиком 7 величины горизонтального перемещения.
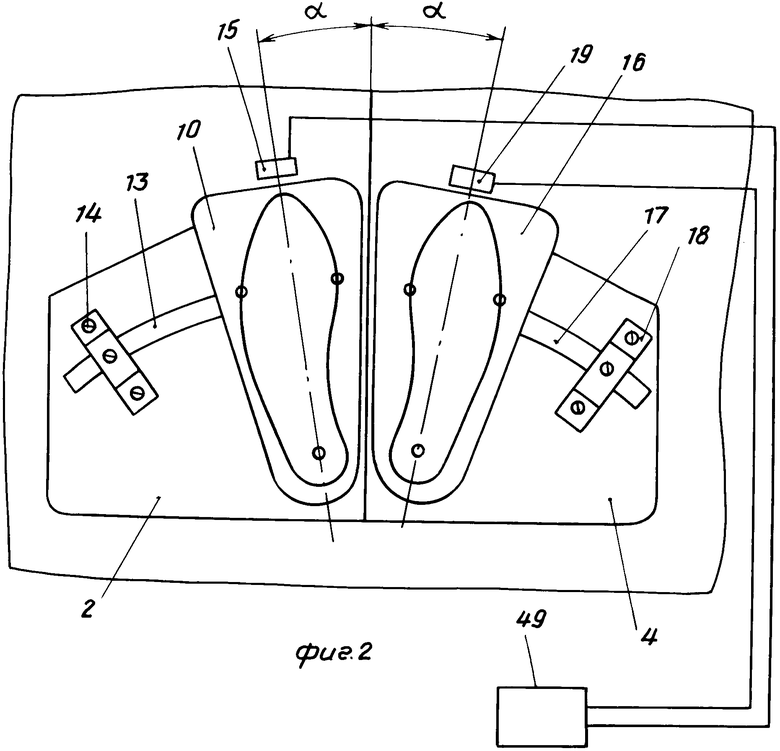
На основании 2 размещена платформа 8 с контуром стопы (фиг. 1) для установки стопы, состоящая из жестко соединенных друг с другом нижней пластины 9 и верхней пластины 10 (фиг. 2), между которыми установлены датчики 11 контроля силовой нагрузки (фиг. 3). Со стороны размещения пятки стопы платформа закреплена на основании 2 осью вращения 12, которая соединяет с основанием 2 нижнюю пластину 9 платформы 8 в центре пяточного бугра обчерка стопы.
В области размещения пальцев стопы платформа снабжена тягой 13 (фиг. 2) для ее вращения относительно основания 2 вокруг оси 12 и фиксатором 14, прижимающим тягу 13 к основанию 2. Для регистрации угла поворота платформы вокруг оси она снабжена датчиком 15.
На основании 5 размещена вторая платформа 16, конструктивно аналогичная первой платформе 8, для установки другой стопы. Вторая платформа снабжена тягой 17, фиксатором 18 и датчиком 19.
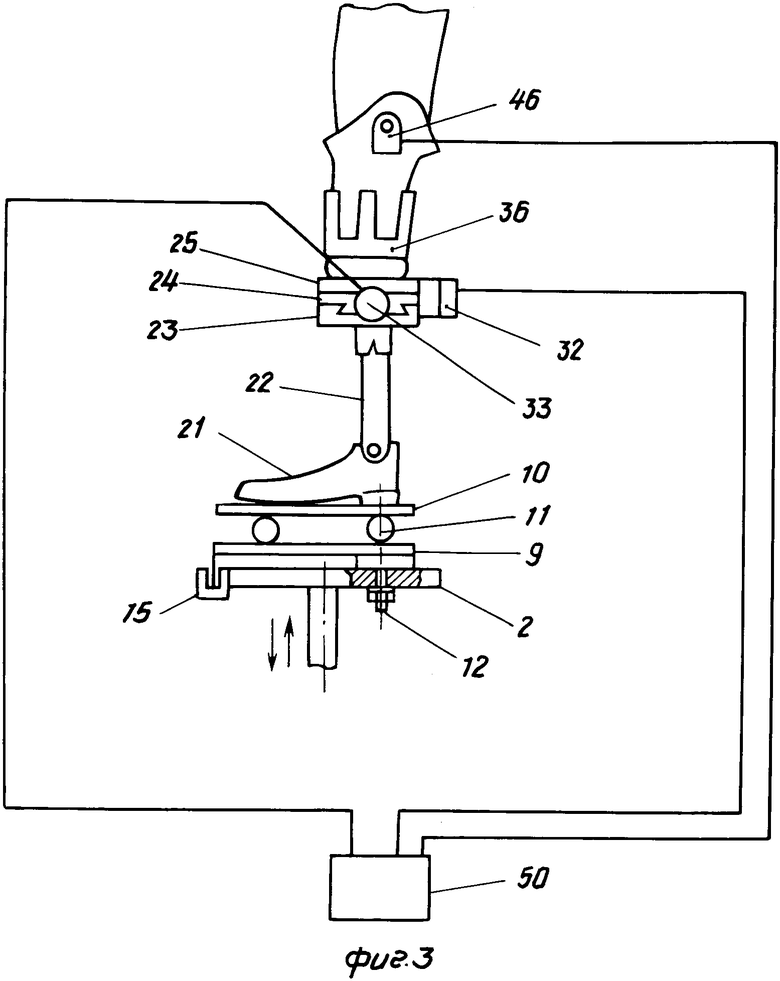
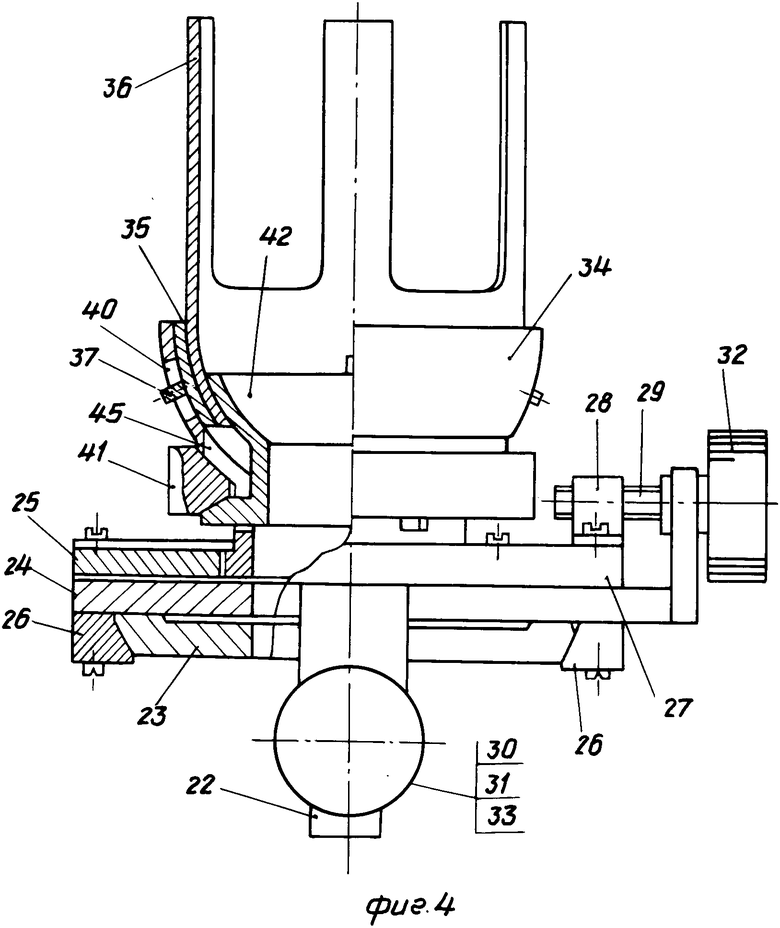
Составной частью предложенного устройства является также протез-прибор 20, состоящий из искусственной стопы 21 и трубки голени 22 (фиг. 3). Механизм регулировки протез-прибора в горизонтальной плоскости состоит из трех плит нижней 23, средней 24 и верхней 25. На средней плите 24 размещены две пары направляющих 26 и 27 (фиг. 24). В верхних направляющих 27 с помощью пары винт-гайка 28, 29 перемещается верхняя плита 25. В нижних направляющих 26 с помощью аналогичной пары винт-гайка 30, 31 перемещается нижняя плита в направлении, перпендикулярном перемещению верхней плиты. В рукоятке каждого винта размещены датчики 32, 33 линейных перемещений соответствующих плит.
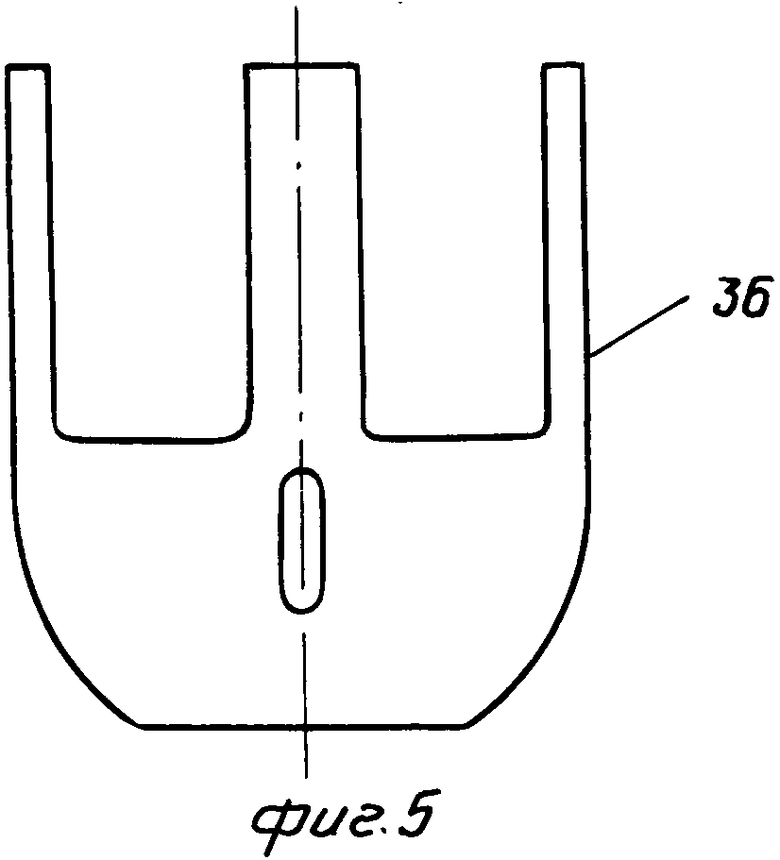
На верхней плите 25 жестко установлены наружная обойма 34 механизма независимой угловой регулировки протез-прибора в двух плоскостях, перпендикулярных друг к другу и к горизонтальной плоскости. Внутрь ее последовательно входят промежуточная 35 и внутренняя 36 обоймы. Промежуточная обойма 35 снабжена двумя парами штырей 37, 38, расположенных во взаимно перпендикулярных плоскостях (фиг. 7, фиг. 8). Одна пара штырей 37 установлена на наружной поверхности промежуточной обоймы, а другая 38 на внутренней ее поверхности.
На внутренней обойме 36 выполнены ответные пазы 39, протяженные (вытянутые) вдоль направляющей сферы обоймы (фиг. 5, фиг. 6), сопряженные со штырями 37 на внутренней поверхности промежуточной обоймы 35. На наружной обойме выполнены пазы 39, сопряженные со штырями 38, на наружной обойме выполнены пазы 40, сопряженные со штырями 37. Система пазов и штырей обеспечивает независимые угловые перемещения внутренней обоймы в двух взаимно перпедикулярных плоскостях.
Механизм угловой регулировки снабжен фиксирующим устройством, включающим хомут 41 и хвостовик 42. Последний имеет сферическую головку 43 (фиг. 9), сопряженную с внутренней обоймой 36, и три фиксатора 44, которые входят в сопряженные с ними пазы 45 в наружной обойме 34. При стягивании хомута 41 жестко фиксируется система, состоящая из внешней, промежуточной, внутренней обойм и хвостовика.
Датчик 46 углового положения приемной гильзы протеза установлен на самой гильзе. В состав предложенного устройства входят также ортопедический пояс 47 и датчик 48 измерения перекоса таза.
Управление движением горизонтального и вертикального приводов (соответственно 6 и 3) осуществляется с пульта управления 49.
Все датчики 4, 7, 15, 19, 32, 33, 46, 48 соединены с ЭВМ 50.
Устройство работает следующим образом. На человеке закрепляют ортопедический пояс 47 с датчиком 48 измерения перекоса таза. На приемной гильзе протеза крепят датчик 46 углового положения приемной гильзы протеза, а саму приемную гильзу закрепляют во внутренней обойме 36 протез-прибора. После этого человека помещают на платформы для установки стоп 8, 16. С помощью тяг 13, 17, фиксаторов 14, 18 и датчиков 15, 19 устанавливают и измеряют оптимальные углы разворота стоп. С помощью привода горизонтального перемещения 3 и в соответствии с показаниями датчика 4 оптимизируют расстояние между стопами и измеряют полученную величину. Оптимальные углы разворота стоп и оптимальное расстояние между стопами устанавливают по субъективным ощущениям комфорта человека. С помощью привода 3 вертикального перемещения по показаниям датчика 48 перекоса таза компенсируют разность длин правой и левой конечностей и оценивают величину этой разности с помощью датчика 4.
Затем с помощью датчиков 11 контроля силовой нагрузки определяется общий вес человека, нагрузки на правую и левую стопы, распределение давления по опорным поверхностям, положение проекции общего центра масс (ОЦМ) на горизонтальной плоскости определяется по одному из известных алгоритмов. Все эти данные передаются на ЭВМ для обработки и отображения на экране дисплея. На экране отображаются контуры правой и левой стопы, проекция общего центра масс на горизонтальную плоскость, направление перекоса таза и его величина, общий вес (в килограммах), нагрузка на правую и левую конечности (в килограммах), распределение нагрузки по поверхности стопы в трех опорных точках (в процентах).
После этого работают с протез-прибором. Если человек не стоит на пятке искусственной стопы 21, то с помощью винта 29 перемещают верхнюю плиту 27 вместе с приемной гильзой протеза назад. Если оказалось, что давление на внешней стороне стопы значительно больше давления на внутренней стороне стопы, то посредством винта 30 нижнюю плиту 23 с трубкой голени 22 и искусственной стопой 21 смещают во внешнюю сторону относительно вертикальной оси, проходящей через центр тяжести человека.
Если давление увеличено на внутренней стороне переднего отдела стопы, то регулировку производят в противоположном направлении тем же винтом 30, при этом возможно появление дискомфортных ощущений в гильзе протеза. Эти ощущения устраняют путем регулирования независимых угловых перемещений внутренней обоймы 36 в двух плоскостях, перпендикулярных друг другу.
В момент устранения ощущения дискомфорта вся система, состоящая из внутренней обоймы 36 с закрепленной в ней приемной гильзой протеза, промежуточной обоймы 35 с двумя парами штырей 37, 38 и внешней обоймой 34, хвостовиком 42 при затягивании хомута 41 жестко фиксируется и определяется пространственное угловое положение приемной гильзы протеза с помощью датчика углового положения этой гильзы.
В процессе работы с протез-прибором данные о пространственном положении приемной гильзы, линейном и угловом, с помощью датчиков 32, 33, 46, передаются на ЭВМ 50 для обработки и отображения на экране дисплея.
Используя линейные и угловые регулировки протез-прибора и манипулируя при необходимости горизонтальным и вертикальным приводами, добиваются оптимального распределения давления обеих стоп по опорной поверхности платформы.
Все эти параметры запоминаются ЭВМ и могут быть распечатаны в виде протоколов.
Полученные с помощью устройства параметры переносятся на изготавливаемый протез по известным технологиям.
Устройство дает возможность произвести тонкую, индивидуальную подгонку протеза, повышает качество протезирования, уменьшает количество примерок и манипуляций с человеком и позволяет точно воспроизвести параметры протеза при повторном протезировании.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДБОРА ПАРАМЕТРОВ ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2063195C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ГИПСОВОГО НЕГАТИВА И ПОЗИТИВА ПРИЕМНОЙ ГИЛЬЗЫ ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2071747C1 |
| СПОСОБ ИЗМЕРЕНИЯ И РЕГУЛИРОВКИ ПАРАМЕТРОВ ПРОТЕЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2093110C1 |
| УСТРОЙСТВО ДЛЯ СТЕНДОВЫХ ИСПЫТАНИЙ ОБЪЕКТОВ ПРОТЕЗНО-ОРТОПЕДИЧЕСКИХ ИЗДЕЛИЙ | 2001 |
|
RU2269981C2 |
| ПРОТЕЗ НИЖНЕЙ КОНЕЧНОСТИ И ЧАСТИ ТУЛОВИЩА | 2001 |
|
RU2219875C2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Установка для резки листового проката | 1987 |
|
SU1470468A1 |
| Способ протезирования нижней конечности и устройство для его осуществления | 1978 |
|
SU719626A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СПИРТОСОДЕРЖАЩЕЙ ЖИДКОСТИ | 1999 |
|
RU2151392C1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА С ТРАНСЛЯТОРОМ ПЕРЕМЕЩЕНИЯ ТУЛОВИЩА ПАЦИЕНТА | 2011 |
|
RU2571805C9 |
Использование: изобретение относится к медицинской технике, конкретно к приспособлениям для сборки, установки и проверки протезов нижних конечностей. Существо изобретения: устройство содержит протез-прибор 20 с механизмом линейной регулировки протез-прибора в горизонтальной плоскости в двух взаимно перпендикулярных направлениях и два основания, одно из которых снабжено приводом 3 вертикального перемещения с датчиком 4 перемещения и соединено с платформой 8, выполненной в виде двух жестко соединенных друг с другом пластин; нижней и верхней, между которыми установлены датчики контроля силовой нагрузки. Устройство дополнительно содержит механизм независимой угловой регулировки протез-прибора в двух плоскостях, перпендикулярных друг к другу и к горизонтальной плоскости, датчик 46 углового положения приемной гильзы протеза, вторую платформу, аналогичную упомянутой и соединенную со вторым основанием, механизм регулировки позы человека в горизонтальной плоскости, ортопедический пояс 47 с датчиком 48 измерения перекоса таза. Механизм линейной регулировки протез-прибора снабжен датчиками линейных перемещений, включенными в конструкцию протез-прибора, по крайней мере одна из платформ закреплена на основании с возможностью углового перемещения в горизонтальной плоскости вокруг вертикальной оси, проходящей в зоне пяточного бугра. Изобретение позволяет производить тонкую, индивидуальную подгонку протеза, повышает качество протезирования, уменьшает количество примерок и манипуляций с человеком и позволяет точно воспроизвести параметры протеза при повторных протезированиях. 2 з.п. ф-лы, 9 ил.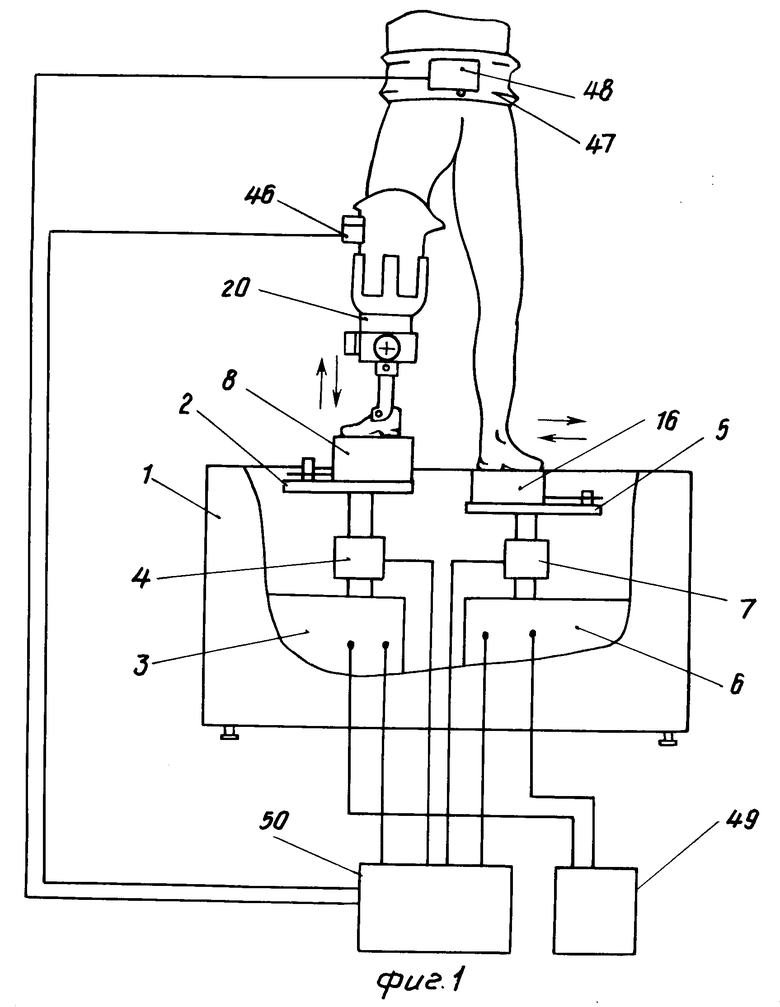
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения технологической базы гильз протезов нижних конечностей | 1984 |
|
SU1195997A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
