Изобретение относится к автоматическому управлению процессами балансировки вращающихся элементов деталей машин и может быть использовано в машиностроительной и авиационной промышленностях.
Известно устройство для балансировки, содержащее резонансный датчик дисбаланса, фильтр, измеритель дисбаланса, коммутатор. Подстройка частоты вращения осуществляется с помощью перестройки статического генератора при визуальном контроле по строболампе.
Данное устройство, хотя и позволяет повысить точность измерений за счет исключения погрешности одного из блоков, но имеет невысокую производительность процесса балансировки. Это объясняется невозможностью включения данного устройства в процесс автоматизации, так как процесс балансировки контролируется визуально по строболампе. Кроме этого, данное устройство обладает довольно низкой точностью определения дисбаланса (процесс балансировки) в целом, так как имеется первоначально заложенная ошибка по углу, связанная с применением строболампы.
Кроме этого, низкие функциональные возможности, связанные с работой устройства на фиксированных частотах, не позволяют перестраивать устройство в рабочем процессе балансировки, что сужает область применения.
Целью изобретения является повышение точности при измерении дисбаланса, повышение производительности процесса балансировки, расширение функциональных возможностей, повышение надежности.
Это достигается применением специальных электронных схем съема и обработки сигналов с механической колебательной системы, калибровкой измерительного тракта, возможностью цифровой обработки аналоговых сигналов, использованием средств ВТ, наличием в устройстве обратных связей, что позволяет оперативно изменять программным путем алгоритмы обработки и осуществлять гибкую перестройку самой структуры устройства.
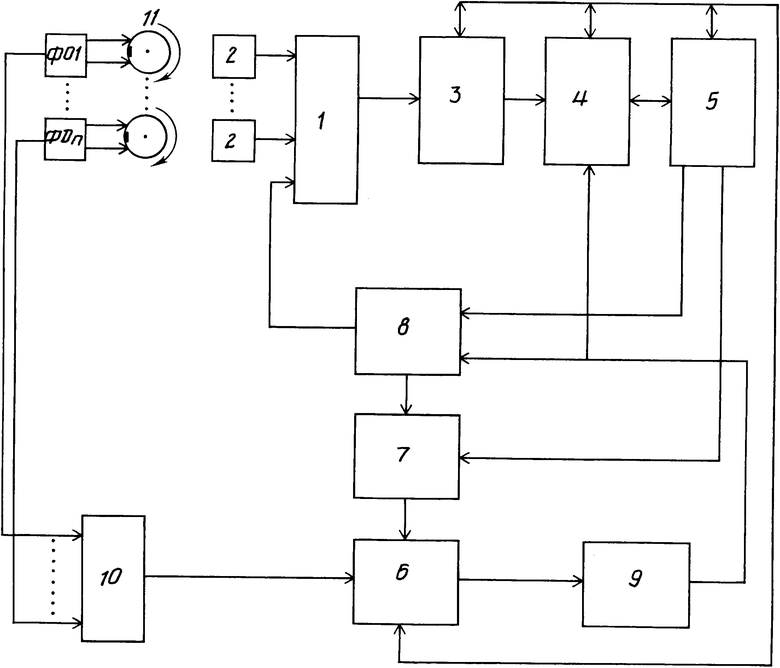
На чертеже представлена принципиальная схема устройства для балансировки.
Коммутатор 1, на входы которого подаются сигналы с вибродатчиков 2, расположенных на балансировочном станке, связан с усилителем-формирователем 3 аналогового сигнала, выход которого связан с преобразователем 4. На выходе последнего установлен вычислитель 5 микро-ЭВМ, с которым шинно связаны усилитель-формирователь 3, измеритель 6 скорости, синхронизатор 7, преобразователь 4.
Выход измерителя скорости соединен с входом умножителя 9, выход которого соединен с 3 входом преобразователя и входом генератора 8, 1-й выход которого соединен со 2-м входом синхронизатора; 2-й выход генератора связан с аналоговым входом коммутатора 1.
Выход синхронизатора 7 связан с 2-м входом измерителя скорости, на 3-й вход которого подается сигнал со 2-го коммутатора 10, входы которого связаны с фотодатчиками 11, размещенными на балансировочном станке.
Устройство работает следующим образом.
На балансируемый элемент (ротор) наносят метку начала отсчета угла дисбалансов. Импульсный сигнал с фотодатчика 11 через коммутатор 10 поступает на измеритель 6 скорости, где преобразуется в цифровой код, соответствующий скорости вращения балансируемого ротора. Данный код (последовательность) одновременно поступает на умножитель 9 и вычислитель 5.
Умножитель осуществляет временную дискретизацию измеренной скорости и формирует импульсы запуска для преобразователя 4, который формирует цифровой код из аналогового сигнала, поступающего с вибродатчика 2 через коммутатор 1 и усилитель-формирователь 3, осуществляющий предварительную фильтрацию сигнала по верхней и нижней частоте, которая необходима для расширения динамического диапазона усилителя-формирователя и дальнейшей цифровой обработки сигнала,
Сформированный цифровой код, соответствующий аналоговому сигналу, поступает в вычислитель 5. На основе этой информации (от измерителя скорости 6 и преобразователя 4) вычислитель производит перенастройку аналоговых блоков (усилителя-формирователя, преобразователя, измерителя скорости), находящихся на общей шине с ним, и рассчитывает текущие значения амплитуд и фаз (угловые положения) измерительных сигналов с вибродатчиков, используя метод гармонического анализа непериодических сигналов, вычисляет дисбалансы баланструемого ротора по динамическим уравнениям Эйлера и Даламбера с учетом их геометрических размеров и масс.
Усилитель-формирователь 3 позволяет в зависимости от частоты и амплитуды входного сигнала аппаратно перестраивать внутреннюю структуру (как в частотном диапазоне, так и по коэффициенту усиления) по программе, заданной вычислителем. Это приводит к устранению субъективных факторов при настройке устройства.
Вычислитель 5 позволяет осуществлять связь между параметрами, характеризующими дисбаланс, и непосредственно дисбалансом элементов с учетом нелинейных характеристик параметров. Это позволяет использовать данное устройство для динамической и статической в динамическом режиме балансировок не только на балансировочных станках, но и для уравновешивания элементов в штатных корпусах на месте эксплуатации.
В предложенном алгоритме, реализованном в устройстве, применен широко известный из теории колебаний (например: Д.В. Хронин. Теория и расчет колебаний в двигателях летательных аппаратов. М. Машиностроение, 1970, с. 62) метод разложения прогибов балки по собственным формам колебаний применительно к разложению параметров, характеризующих дисбаланс, от самого дисбаланса. Это позволяет повысить точность вычисления дисбаланса за счет существенно меньшей зависимости форм разложения от величины дисбаланса, чем параметров дисбаланса от его величины.
Следует отметить новизну использования данного метода применительно к балансировочным станкам.
Функциональные возможности расширяются также за счет возможности применения устройства в зарезонансных и дорезонансных системах балансировок, а также за счет возможности подключения к одному предложенному устройству нескольких балансируемых роторов.
Таким образом, внедрение данного устройства в процесс балансировки позволяет увеличить производительность, расширить функциональные возможности, повысить надежность, при сведении субъективных факторов к минимуму.
Наличие стандартного интерфейса ИРПС в устройстве позволяет включать его в АСУТП.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИСБАЛАНСА | 1994 |
|
RU2078320C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1994 |
|
RU2046310C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| Балансировочный станок | 1977 |
|
SU729456A2 |
| Устройство для управления вращением шпинделя балансировочного станка | 1981 |
|
SU998887A2 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1983 |
|
SU1151845A1 |
| Балансировочный станок | 1974 |
|
SU531052A1 |
Использование: машиностроение, авиационная промышленность, автоматическая балансировка вращающихся элементов деталей машин. Сущность изобретения: устройство содержит датчики дисбаланса, фотодатчики, два коммутатора, усилитель-формирователь, генератор эталонной частоты, умножитель, вычислитель, преобразователь, измеритель скорости и синхронизатор. Датчики дисбаланса и фотодатчики соединены соответственно с первым и вторым коммутаторами, генератор эталонной чатоты с первым коммутатором, синхронизатором, умножителем и вычислителем. Измеритель скорости соединен с синхронизатором, вторым коммутатором, и умножителем. Усилитель-формирователь соединен с первым коммутатором и преобразователем, который, в свою очередь, соединен с умножителем. Вычислитель, усилитель-формирователь, преобразователь и измеритель скорости соединены общей шиной. 1 ил.
УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН, содержащее датчик дисбаланса, коммутатор, имеющий два входа, усилитель-формирователь, вход которого соединен с выходом коммутатора, и генератор эталонной частоты, выход которого соединен с первым входом коммутатора, отличающееся тем, что оно снабжено по крайней мере одним дополнительным датчиком дисбаланса, фотодатчиками, умножителем, дополнительным коммутатором, вычислителем и имеющими по два входа каждый преобразователем, измерителем скорости и синхронизатором, генератор эталонной частоты выполнен с двумя входами и двумя выходами, выход усилителя-формирователя соединен с первым входом преобразователя, выход которого соединен с вычислителем, а второй вход с выходом умножителя, выход вычислителя соединен с первым входом синхронизатора, выход которого соединен с первым входом измерителя скорости, а второй вход с вторым выходом генератора эталонной частоты, датчики дисбаланса соединены с вторым входом коммутатора, фотодатчики соединены с входом дополнительного коммутатора, выход которого соединен с вторым входом измерителя скорости, выход которого соединен с входом умножителя, первый вход генератора эталонной частоты соединен с выходом умножителя, а второй вход с вычислителем, вычислитель, усилитель-формирователь, преобразователь и измеритель скорости соединены общей шиной.
| Балансировочный станок | 1986 |
|
SU1383124A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
