Изобретение относится к машиностроению и может быть использовано, например, для балансировки роторов.
В технике широко известны балансировочные станки с приводом вращения изделия (типа вала), содержащие станину с установленной на ней гибкой опорой для размещения балансируемого изделия, датчики вибрации, установленные на опоре. Гибкая опора выполнена в виде люлек двух раздельных опор, закрепленных на станине, люльки опор соединены с их корпусами на податливой подвеске из двух стальных лент, обеспечивающих зарезонансный режим балансировки (Основы балансировочной техники, под редакцией Щепетильникова В.А. М. Машиностроение, 1975, т. 2, с. 371). Однако данная структура колебательной системы балансировочного станка не обладает достаточной линейностью, что приводит к погрешности процесса балансировки.
Известен также балансировочный станок, содержащий основание, параллельно размещенные на нем две направляющие, гибкую опору, выполненную в виде двух параллельно установленных стоек, размещенных с возможностью перемещения вдоль направляющих, двух люлек для размещения балансируемого объекта, каждая из которых соединена с соответствующей стойкой шарнирно посредством тяг и размещена с возможностью плоскопараллельного перемещения относительно стойки. Балансировочный станок содержит также два датчика виброскорости, фазоотметчик и микропроцессорный блок обработки информационного сигнала. (Проспект фирмы IRD Mechanalysis). Известный "Балансировочный станок" является ближайшим аналогом по технической сущности и достигаемому результату к предложенному техническому решению и принят за прототип. Известный станок обеспечивает высокую точность уравновешивания и надежность эксплуатации.
Однако использование датчика виброскорости в качестве информационного датчика обуславливает наличие погрешности преобразования сигнала при его фильтрации, поскольку из-за большого соотношения сигнал/шум возникают трудности выделения полезного сигнала, несущего информацию о колебаниях ротора.
Целью изобретения является повышение точности процесса балансировки путем уменьшения погрешности измерений за счет уменьшения соотношения сигнал/шум.
Это обеспечивается тем, что балансировочный станок, содержит основание, параллельно размещенные на нем две направляющие, гибкую опору, выполненную в виде двух параллельно установленных стоек, размещенных с возможностью перемещения вдоль направляющих, двух люлек для размещения балансируемого объекта, каждая из которых соединена с соответствующей стойкой шарнирно посредством тяг и размещена с возможностью плоско-параллельного перемещения относительно стойки, фазоотметчик вращения балансируемого объекта, два датчика информационного сигнала и микропроцессорный блок обработки сигнала. Датчики информационного сигнала выполнены в виде датчиков виброускорения, каждый из которых размещен на соответствующей люльке гибкой опоры, а микропроцессорный блок обработки сигнала выполнен в виде последовательно соединенных коммутатора, блока фильтров, аналого-цифрового преобразователя, микропроцессора и блока отображения информации, блока задания режима измерения, выход которого соединен со вторым входом микропроцессора, с третьим входом которого соединен выход фазоотметчика вращения балансируемого объекта и второй вход аналого-цифрового преобразователя, второй и третий выходы микропроцессора соединены соответственно с первым входом блока фильтров, второй и третий входы коммутатора соединены соответственно с выходами первого и второго датчиков виброускорения.
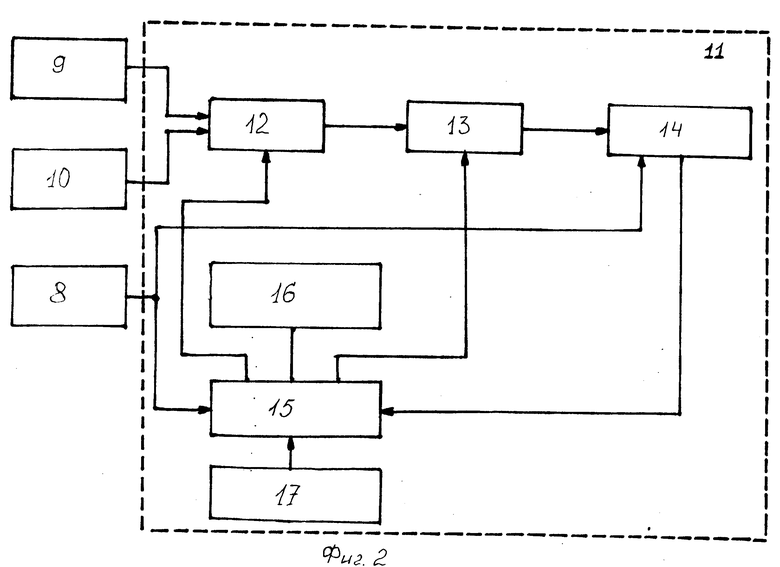
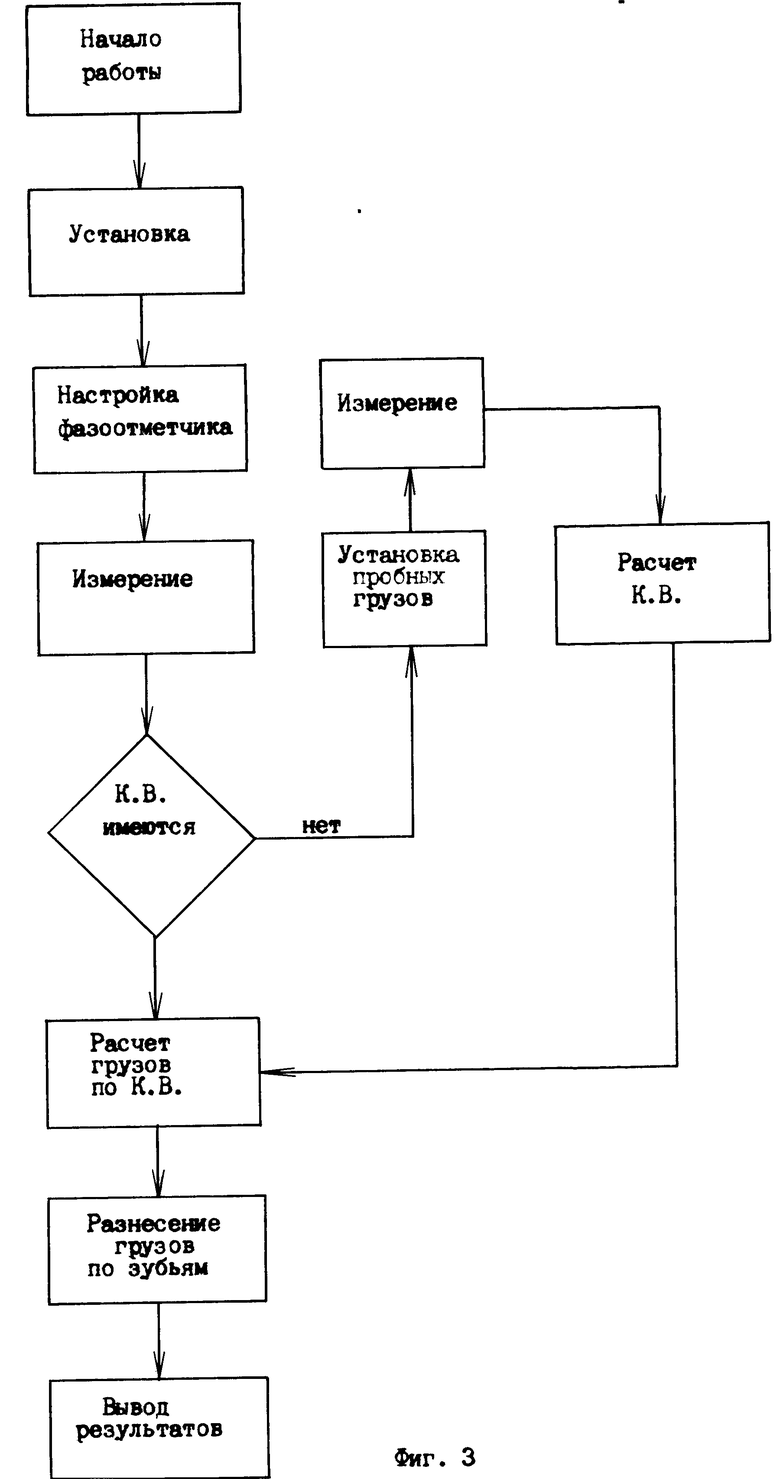
На фиг. 1 изображен балансировочный станок; на фиг. 2 блок-схема микропроцессорного блока обработки сигнала; на фиг. 3 блок-схема алгоритма процесса балансировки.
Балансиpовочный станок содержит основание 1, параллельно размещенные первую 2 и вторую 3 направляющие, гибкую опору, выполненную в виде двух параллельно установленных стоек 4 и 5, размещенных с возможностью перемещения вдоль направляющих 2 и 3, двух люлек 6 и 7 для размещения балансируемого объекта, каждая из которых соединена с соответствующей стойкой шарнирно посредством тяг и размещена с возможностью плоско-параллельного перемещения относительно стойки, фазоотметчик 8 вращения балансируемого объекта, первый 9 и второй 10 датчики виброускорения, каждый из которых размещен на соответствующей люльке 6 и 7 и микропроцессорный блок 11 обработки сигнала, который выполнен в виде соединенных последовательно коммутатора 12, блока 13 фильтров, аналого-цифрового преобразователя 14, микропроцессора 15 и блока 16 отображения информации, блок 17 задания режима измерения, выход которого соединен со вторым входом микропроцессора 15, с третьим входом которого соединены выход фазоотметчика 8 вращения балансируемого объекта и второй вход аналого-цифрового преобразователя 14, второй и третий выходы микропроцессора 15 соединены соответственно с первым входом коммутатора 12 и вторым входом блока 13 фильтров, второй и третий входы коммутатора 12 соединены соответственно с выходами первого 9 и второго 10 датчиков виброускорения.
Балансировочный станок работает следующим образом.
Балансируемый объект (например, ротор) размещается на люльках 6 и 7 гибкой опоры и включают привод (не показан) вращения вала. После разгона ротора до требуемой частоты (в диапазоне 120-3000 об/мин) при нажатии соответствующей клавиши блока 17 задания режима микропроцессором 15 устанавливается требуемый режим измерения.
Под действием дисбаланса неуравновешенный ротор вместе с люльками 6 и 7 совершает колебания. Кроме того, в силу воздействия импульсных возбуждений гибкая опора возбуждается на собственной частоте, что является помехой для процесса балансировки. В связи с использованием в качестве информационных датчиков в балансировочном станке датчиков виброускорения в выходном сигнале уровни полезного сигнала, несущего информацию о неуравновешенности ротора, и сигнал помехи, обусловленного собственными колебаниями люльки, становятся соизмеримыми, т. е. улучшается соотношение сигнал/шум. Это упрощает процесс выделения информационного параметра, который производится следующим образом. Под действием управляющего сигнала, поступающего с выхода микропроцессора 15 на вход коммутатора 12, производится коммутация сигнала вибрации, измеренной соответственно первым 9 и вторым 10 датчиками виброускорения, сигнал с выхода коммутатора 12 поступает на вход блока 13 фильтрации, где производится его аналоговая фильтрация в области верхних и нижних частот (2-60 Гц). Выделенный сигнал, содержащий информацию о неуравновешенности ротора после аналого-цифрового преобразования преобразователем 14, тактируемого сигналом фазоотметчика 8, поступает в микропроцессор 15.
Микропроцессор 15 по специальной программе производит интегральное преобразование Фурье поступившего сигнала, векторное усреднение полученных значений амплитуды A и фазы и расчет корректирующих масс по коэффициентам влияния.
Результат вычисления отображается на табло блока 16 отображения информации.
По полученным значениям производится установка требуемых корректирующих масс, т.е. осуществляется балансировка одним из известных способов.
В качестве микропроцессора 15 может быть использован, например, процессор фирмы INTEL 180С85.
Т.о. измерение сигнала вибрации датчиками виброускорения, его аналоговая фильтрация в выбранном диапазоне частот и обработка сигнала, заключающаяся в методах интегрального преобразования Фурье и векторного усреднения, позволило в предлагаемом станке значительно увеличить точность определения информативного параметра, тем самым улучшить качество процесса балансировки и уменьшить его трудоемкость.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРОВОЧНЫЙ СТАНОК И НИЗКОЧАСТОТНАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2593676C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ВРАЩАЮЩИХСЯ ЭЛЕМЕНТОВ ДЕТАЛЕЙ МАШИН | 1993 |
|
RU2039957C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИСБАЛАНСА | 1994 |
|
RU2078320C1 |
| МИКРОПРОЦЕССОРНЫЙ ВИБРОМЕТР | 1995 |
|
RU2098777C1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627968C1 |
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛЯТОР | 1995 |
|
RU2091630C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 2014 |
|
RU2561249C2 |
| Способ балансировки ротора газоперекачивающего агрегата | 2017 |
|
RU2658597C1 |
Использование: изобретение относится к машиностроению и может быть использовано, например, для балансировки роторов. Сущность: балансируемый объект размещают на люльку 6,7 гибкой опоры станка. После разгона ротора до требуемой частоты (120-3000 об/мин) датчиками 9, виброускорения регистрируется информационный сигнал, который поступает в микропроцессорный блок 11 обработки. Микропроцессор поочередно коммутирует входы коммутатора и сигнал, после его аналоговой фильтрации в блоке в области верхних и нижних частот (2-60 Гц) и аналого-цифрового преобразования преобразователем поступает в микропроцессор. Микропроцессор по специальной программе производит интегральное преобразование Фурье поступившего сигнала, его векторное усреднение и расчет корректирующих масс по коэффициенту влияния. Результат вычислений отображается на табло блока отображения. Затем производится установка требуемых корректирующих масс, т. е. осуществляется балансировка одним из известных способов. 3 ил.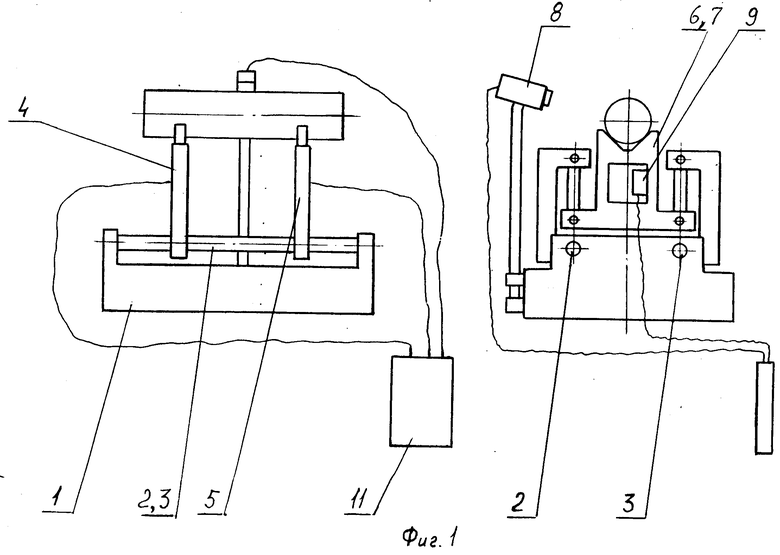
БАЛАНСИРОВОЧНЫЙ СТАНОК, содержащий основание, размещенные на нем две направляющие, гибкую опору, выполненную в виде двух параллельно установленных стоек, размещенных с возможностью перемещения вдоль направляющих, двух люлек для размещения балансируемого объекта, каждая из которых соединена с соответствующей стойкой шарнирно посредством тяг и размещена с возможностью плоскопараллельного перемещения относительно стойки, фазоотметчик вращения балансируемого объекта, первый и второй датчики информационного сигнала, и микропроцессорный блок обработки сигнала, отличающийся тем, что датчики информационного сигнала выполнены в виде датчиков виброускорения, каждый из которых размещен на соответствующей люльке гибкой опоры, а микропроцессорный блок обработки сигнала выполнен в виде последовательно соединенных коммутатора, блока фильтров, аналого-цифрового преобразователя, микропроцессора и блока отображения информации, блока задания режимов измерения, выход которого соединен со вторым входом микропроцессора, с третьим входом которого соединен выход фазоотметчика вращения балансируемого объекта и второй вход аналого-цифрового преобразователя, второй и третий выходы микропроцессора соединены соответственно с первым входом коммутатора и вторым входом блока фильтров, второй и третий входы коммутатора соединены соответственно с выходом первого и второго датчиков виброускорения.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Проспект фирмы "IRD Mechanalusis" Балансировочный станок. | |||
