Изобретение относится к измерительной технике, используемой преимущественно в балансировочных станках дпя управления частотой вращения гибких роторов.
По основному авт. св. № 932327 известно устройство для управления вращением шпинделя балансировочного станка, содержащее цепь фазовой автоподстройки частоты, выполненную в виде датчика дисбаланса, связанного с ним фильтра, усилителя и фазометра, входы которого соединены со входом и выходом фильтра, а выход со входом усилителя, силовой преобразователь, связанный с ним привод, блок частотной автоподстройки частоты, соединенный с приводом, программный блок, выполненный в виде последовательно соединенных генератора тактовой частоты, синтезатора частоты и ,преобразователя частота - напряжение, схему - равнения, вхо.цы которой соединены соответственно с выходами усилителя и блока частотной автоподстройки частоты, а выход со входом силового преобразователя, блок цифровой коррекции, выполненный в виде последовательно соединенных частотного тахогенератора, формирователя импульсов, цифрового корректора и преобразователя код-напряжение, выход которого связан с третьим входом схфмы сравнения и измерителя частоты вращения, вход которого соединен с входом цифрового корректора, четвертый вход схемы сравнения связан с выходом преобразователя частота-напряжение, а так10же задатчик скорости, подключенный ко второму входу синтезатора частоты, выход которого соединен со вторым входом цифрового корректора, выход генератора тактовой частоты - со
15 вторым входом измерителя частоты вращения, а частотный тахогенератор механически связан с приводом LIj
Недостатком известного устройства 20 является необходимость вручную подустраивать фильтр на текущую часто ту балансировки в процессе испытаний, требукядаш затрат времени и вызывающая погрешности при измерении параметров дисбаланса из-за субъективных
25 опшбок оператора, что снижает точность балансировки.
Цельизобретения - повышение точности балансировки.
Поставленная цель достигается тем,
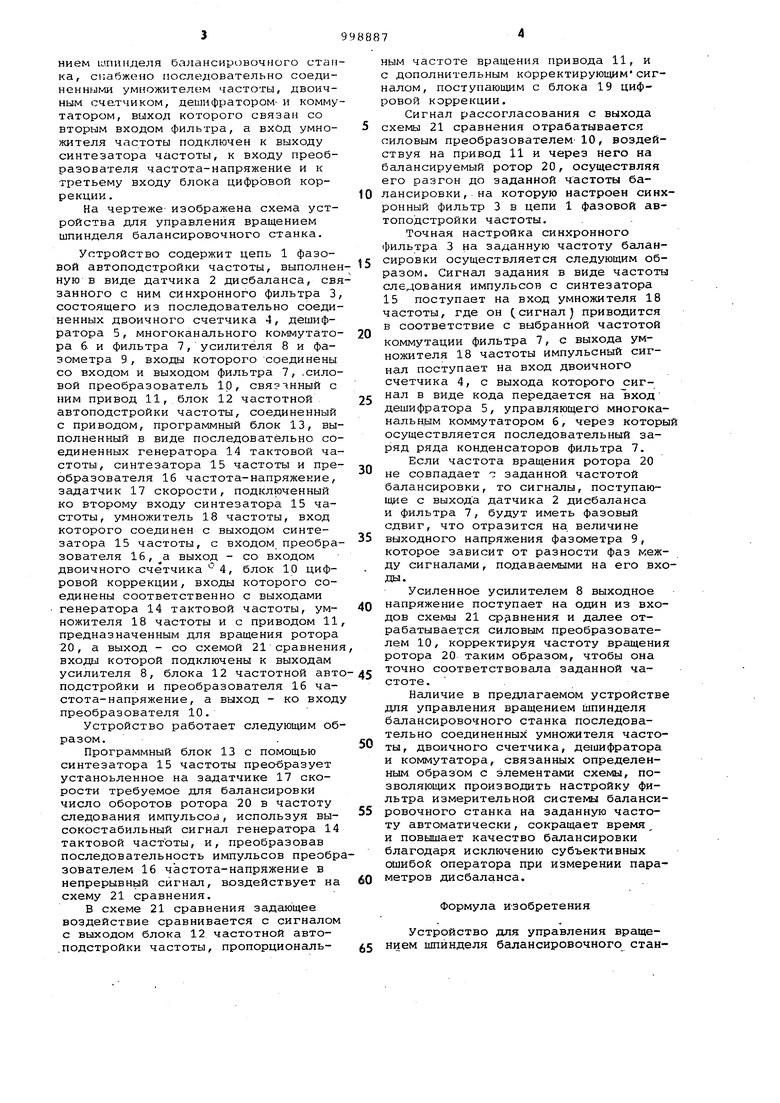
30 что устройство для управления вращёнием шпинделя балансировочного стан ка, снабжено последовательно соединенными умЕ1ожителем частоты, двоичным сче.тчиком, дешифратором и комму татором, выход которого связан со вторым входом фильтра, а вхОд умножителя частоты подключен к выходу синтезатора частоты, к входу преобразователя частота-напряжение и к третьему входу блока цифровой коррекции . На чертеже- изображена схема устройства для управления вращением шпинделя балансировочного станка. Устройство содержит цепь 1 фазовой автоподстройкк частоты, выполнен ную в виде датчика 2 дисбаланса, свя занного с ним синхронного фильтра 3 состоящего из последовательно соединенных двоичного счетчика 4, дешифратора 5, многоканального коммутатора 6 и фильтра 7, усилителя 8 и фазометра 9, входы которого соединены со входом и выходом фильтра 7, .силовой преобразователь 10, с ним привод 11, блок 12 частотной автоподстройки частоты, соединенный с приводом, программный блок 13, выполненный в виде последовательно соединенных генератора 14 тактовой частоты, синтезатора 15 частоты и преобразователя 16 частота-напряжение, задатчик 17 скорости, подключенный ко второму входу синтезатора 15 частоты, умножитель 18 частоты, вход которого соединен с выходом синтезатора 15 частоты, с входом преобра зователя 16, а выход - со входом двоичного счетчика -4, блок 10 цифровой коррекции, входы которого соединены соответственно с выходами генератора 14 тактовой частоты, умножителя 18 частоты и с приводом 11 предназначенным для вращения ротора 20, а выход - со схемой 21 сравнени входы которой подключены к выходам усилителя 8, блока 12 частотной авт подстройки и преобразователя 16 частота-напряжение, а выход - ко вход преобразователя 10. Устройство работает следующим об разом. Программный блок 13 с помощью синтезатора 15 частоты преобразует устаноьленное на задатчике 17 скорости требуемое для балансировки число оборотов ротора 20 в частоту следования импульсов, используя высокостабильный сигнал генератора 14 тактовой частоты, и, преобразовав последовательность импульсов преобр зователем 16 частота-напряжение в непрерывный сигнал, воздействует на схему 21 сравнения. В схеме 21 сравнения задающее воздействие сравнивается с сигналом с выходом блока 12 частотной авто.подстройки частоты, пропорциональным частоте вращения привода 11, и с дополнительным корректирующимсигналом, поступающим с блока 19 цифровой коррекции. Сигнал рассогласования с выхода схемы 21 сравнения отрабатывается силовым преобразователем- 10, воздействуя на привод 11 и через него на балансируемый ротор 20, осуществляя его разгон до заданной частоты балансировки, на которую настроен синхронный фильтр 3 в цепи 1 фазовой автоподстройки частоты. Точная настройка синхронного фильтра 3 на заданную частоту балансировки осуществляется следующим образом. Сигнал задания в виде частоты следования импульсов с синтезатора 15 поступает на вход умножителя 18 частоты, где он Qсигнал) приводится в соответствие с выбранной частотой коммутации фильтра 7, с выхода умножителя 18 частоты импульсный сигнал поступает на вход двоичного счетчика 4, с выхода которого сигнал в виде кода передается на Ъход дешифратора 5, управляющего многоканальным коммутатором 6, через который осуществляется последовательный заряд ряда конденсаторов фильтра 7. Если частота вращения ротора 20 не совпадает т: заданной частотой балансировки, то сигналы, поступающие с выхода датчика 2 дисбаланса и фильтра 7, будут иметь фазовый сдвиг, что отразится на величине выходного напряжения фазометра 9, которое зависит от разности фаз между сигналами, подаваемыми на его входы. Усиленное усилителем 8 выходное напряжение поступает на один из входов схемы 21 сравнения и далее отрабатывается силовым преобразователем 10, корректируя частоту вращения ротора 20 таким образом, чтобы она точно соответствовала заданной частоте. Наличие в предлагаемом устройстве для управления вращением шпинделя балансировочного станка последовательно соединенных умножителя частоты, двоичного счетчика, дешифратора и коммутатора, связанных определенным образом с элементами схемы, позволяющих производить настройку фильтра измерительной системы балансировочного станка на заданную частоту автоматически, сокращает время, и повышает качество балансировки благодаря исключению субъективных свиибой оператора при измерении параметров дисбаланса. Формула и-зобретения Устройство для управления вращением шпинделя балансировочного станка по авт. св. 932327, о т л и чaющeecя тем, что, с целью повышения точности балансировки, оно снабжено последовательно соединенными умножителем частоты, ДВОИЧНЕЛМ счетчиком, дешифратором и коммутато ром, выход которого связан с вторым входом фильтра, а вход умножителя
частоты подключен к выходу синтезатора частоты, /к входу преобразователя частота-напряжение и к третьему входу блока цифровой коррекции.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельстго СССР №932327,кл.йО М 1/22,1980;прог6гипГ .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления вращением шпинделя балансировочного станка | 1980 |
|
SU932327A1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| Устройство для управления вращениемшпиНдЕля бАлАНСиРОВОчНОгО CTAHKA | 1979 |
|
SU847104A1 |
| Устройство для измерений дисбаланса роторов | 1981 |
|
SU1017937A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1173213A1 |
| Цифровой синтезатор частоты | 1984 |
|
SU1234966A1 |
| Измерительное устройство балансировочного станка | 1977 |
|
SU748156A1 |
| Цифровой синтезатор частоты | 1989 |
|
SU1637022A2 |
| Балансировочный станок | 1983 |
|
SU1155886A1 |
| Автоматический балансировочный станок | 1985 |
|
SU1226089A1 |
