Изобретение относится к измерительной технике, предназначено для преобразования угловой скорости вращения вала в частоту следования импульсов, определения направления вращения вала и может быть использовано для измерения линейной скорости и определения направления движения (вперед-назад) подвижных наземных колесных или гусеничных объектов.
Известен электромеханический датчик скорости, используемый в серийной навигационной аппаратуре [1] содержащий модуляционный диск, индукционные датчики, расположенные с перекрытием зон срабатывания, генератор, выход которого соединен с первичными обмотками индукционных датчиков, вторичные обмотки которых соединены соответственно с входами детекторов, выходы которых соединены соответственно с входами формирователей прямоугольных импульсов.
Принцип действия известного устройства основан на том, что он формирует две одинаковые последовательности прямоугольных импульсов, сдвинутых относительно друг друга по фазе в ту или иную сторону в зависимости от направления вращения диска. При этом сдвиг не превышает длительности импульса и обычно равен ее половине. Частота следования импульсов пропорциональна скорости вращения диска.
Недостатком известного устройства является низкая достоверность, связанная с наличием помех на фронтах выходных импульсов, вызванных как паразитными механическими колебаниями диска вследствие вибрации объекта установки датчика, так и электрическими помехами на фронтах огибающих на входах формирователей прямоугольных импульсов. Помехи особенно вероятны на малых скоростях, когда фронты огибающих растянуты во времени.
Целью изобретения является повышение достоверности электромеханического датчика скорости за счет исключения ложных импульсов на границах зон срабатывания индукционных датчиков.
Цель достигается тем, что в электромеханический датчик скорости дополнительно вводятся три элемента НЕ, шесть триггеров, элемент 4И, причем выход одного формирователя прямоугольных импульсов соединен с первым элементом НЕ, с инверсными R-входами и прямыми D-входами первого и второго триггеров и прямым D-входом третьего триггера, прямой динамический С-вход которого соединен с выходом второго элемента НЕ, вход которого соединен с выходом элемента 4И и с прямым динамическим С-входом четвертого триггера, прямой D-выход которого соединен с выходом другого формирователя прямоугольных импульсов, прямыми динамическими С-входами первого и пятого триггеров и входом третьего элемента НЕ, выход которого соединен с прямыми динамическими С-входами второго и шестого триггеров, выход первого элемента НЕ соединен с инверсными R-входами и прямыми D-входами пятого и шестого триггеров, а инверсные выходы первого, второго, пятого, шестого триггеров соединены с входами элемента 4И.
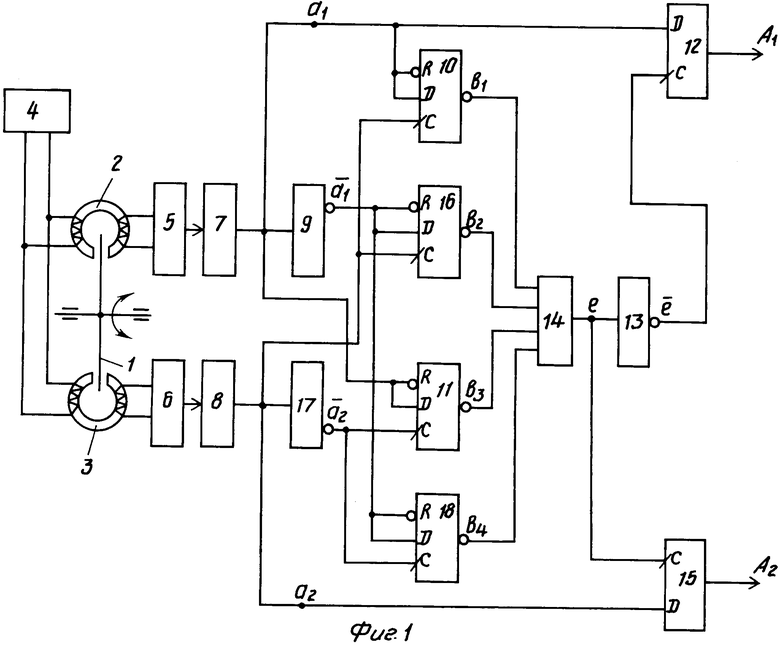
На фиг.1 представлена функциональная схема электромеханического датчика скорости.
Датчик содержит модуляционный диск 1, индукционные датчики 2, 3, расположенные с перекрытием зон срабатывания, генератор 4, выход которого соединен с первичными обмотками индукционных датчиков 2, 3, вторичные обмотки которых соединены соответственно с входами детекторов 5, 6, выходы которых соединены соответственно с входами формирователей 7,8 прямоугольных импульсов, выход формирователя 7 прямоугольных импульсов соединен с входом элемента НЕ 9, с инверсными R-входами и прямыми D-входами триггеров 10, 11 и прямым D-входом триггера 12, выход которого является первым выходом электромеханического датчика скорости, а прямой динамический С-вход соединен с выходом элемента НЕ 13, вход которого соединен с выходом элемента 4И 14 и с прямым динамическим С-входом триггера 15, выход которого является вторым выходом электромеханического датчика скорости, а прямой D-вход соединен с выходом формирователя 8 прямоугольных импульсов, прямыми динамическими С-входами триггеров 10, 16 и входом элемента НЕ 17, выход которого соединен с прямыми динамическими С-входами триггеров 11, 18, выход элемента НЕ 9 соединен с инверсными R-входами и прямыми D-входами триггеров 16, 18, а инверсные выходы триггеров 10, 11, 16, 18 соединены с входами элемента 4И.
Электромеханический датчик скорости работает следующим образом.
Напряжение переменного тока высокой частоты поступает от генератора 4 на первичные обмотки индукционных датчиков 2, 3 и трансформируется в их вторичные обмотки. Магнитный поток, охватывающий сердечник индукционного датчика, зависит от углового положения модуляционного диска 1, имеющего периодическую структуру (например, в виде зубьев, равномерно расположенных по периферии диска). При вращении модуляционного диска магнитный поток индукционного датчика изменяется, вызывая изменение амплитуды напряжения на вторичной обмотке датчика. Огибающая амплитуда выделяется в детекторах 5, 6, поступает на входы формирователей 7, 8 прямоугольных импульсов, в качестве которых могут использоваться такие пороговые устройства, как триггер Шмитта или компараторы. Частота импульсов на выходе формирователей 7, 8 зависит от скорости вращения модуляционного диска 1, а фазовый сдвиг от направления его вращения. Количество импульсов пропорционально пути, проходимому объектом установки датчика. Оптимальным для предлагаемого технического решения является вариант, когда импульсные последовательности, снимаемые с выходов формирователей 7, 8 прямоугольных импульсов, имеют форму меандра и сдвинуты относительно друг друга на величину, равную половине длительности импульса, т.е. на 90о. Это достигается выбором размеров активной и пассивной зон модуляционного диска 1 (например, ширины зубьев и расстояния между зубьями) и относительным угловым положением индукционных датчиков.
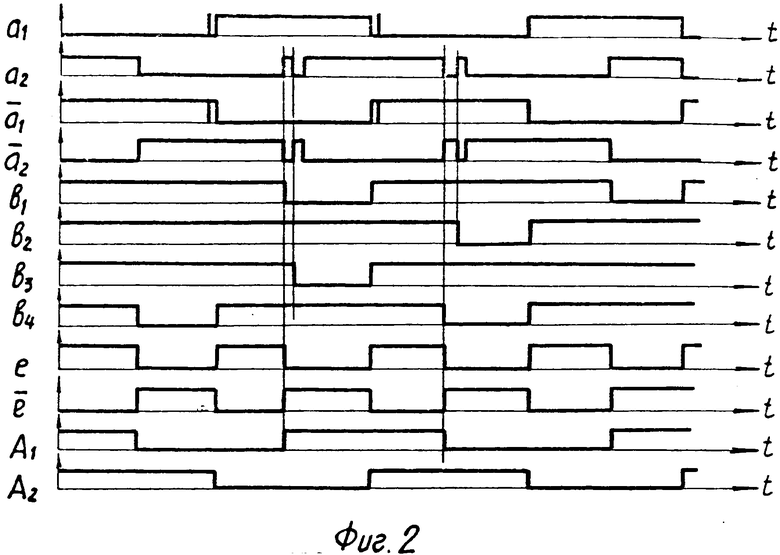
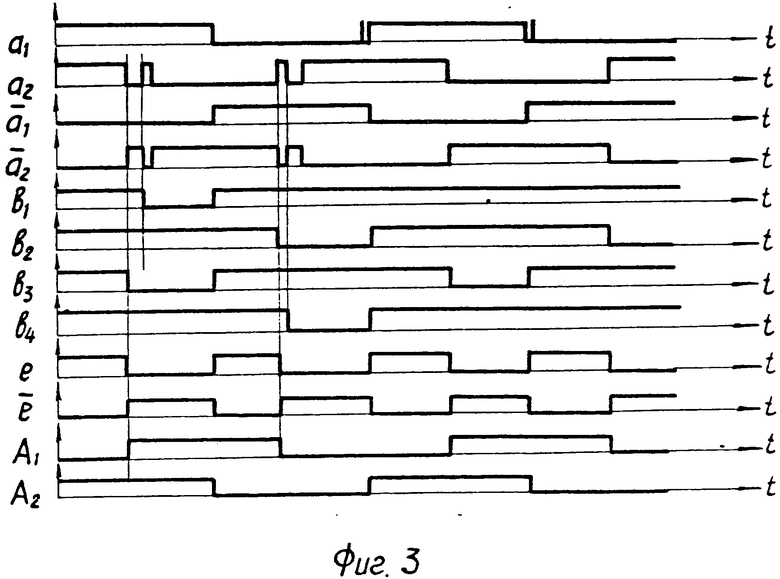
На фиг.2 и 3 представлены диаграммы работы вновь введенных элементов при различных направлениях диска 1.
В первом случае (фиг.2) фаза а1 опережает фазу а2, во втором (фиг.3) наоборот.
На фронтах фаз а1, а2 показаны помехи. Диаграммы  ,
,  представляют собой инверсию диаграмм а1, а2.
представляют собой инверсию диаграмм а1, а2.
Триггеры 10, 11, 16, 18 формируют сигналы, управляющие триггерами 12, 15 (см. диаграммы b1, b2, b3, b4). Два из четырех триггеров формируют управляющие сигналы безусловно (см. b1, b4 фиг.2; b2, b3 фиг.3), а два триггера при наличии помех (см. b2, b3 фиг.2; b1, b4 фиг.3). Результаты сложения управляющих сигналов представлены на диаграмме е. Помехи на нем уже отсутствуют. Для управления триггером 12 используется сигнал диаграммы е, для управления триггером 15 этот сигнал инвертируется (диаграмма  ). Триггеры 12, 15 переключаются только по передним фронтам сигналов, поступающих на их С-входы. Поскольку указанные фронты приходятся на середину импульса или паузы исходных фаз а1, а2, т.е. на часть зоны срабатывания индукционных датчиков (в угловом или временном выражении), информация которой максимально достоверна, то информация на выходах триггеров 12, 15 будет наиболее достоверна. Выходные сигналы А1, А2 имеют такие же фазовые соотношения, как и а1, а2.
). Триггеры 12, 15 переключаются только по передним фронтам сигналов, поступающих на их С-входы. Поскольку указанные фронты приходятся на середину импульса или паузы исходных фаз а1, а2, т.е. на часть зоны срабатывания индукционных датчиков (в угловом или временном выражении), информация которой максимально достоверна, то информация на выходах триггеров 12, 15 будет наиболее достоверна. Выходные сигналы А1, А2 имеют такие же фазовые соотношения, как и а1, а2.
При нулевой скорости (на стоянке объекта) наличие колебаний диска в пределах зоны уверенного срабатывания (без помех) индукционного датчика (например, 2) не вызовет, так же как и в прототипе, помех по этой фазе. В отличие от прототипа ложные импульсы по другой фазе, вызываемые пересечением границы срабатывания ее индукционного датчика 3, будут отсутствовать, так как при этом на С-входе соответствующего триггера 15 сохраняется потенциал и на выходе триггера 15 соответственно сохраняется предыдущая информация.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ | 1986 |
|
RU2039988C1 |
| ЯЧЕЙКА ПАМЯТИ | 2001 |
|
RU2214037C2 |
| Реверсивный импульсный датчик угловых перемещений | 1989 |
|
SU1696847A1 |
| ТРЕХСТАБИЛЬНЫЙ СЧЕТНЫЙ ТРИГГЕР (ВАРИАНТЫ) | 1993 |
|
RU2093955C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК СКОРОСТИ | 1979 |
|
RU2039997C1 |
| СЧЕТНОЕ УСТРОЙСТВО | 1992 |
|
RU2040113C1 |
| СЧЕТЧИК ИМПУЛЬСОВ В КОДЕ ГРЕЯ | 1991 |
|
RU2110146C1 |
| СЧЕТЧИК ИМПУЛЬСОВ В КОДЕ ГРЕЯ | 1991 |
|
RU2042268C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ТИРИСТОРОВ | 1992 |
|
RU2026591C1 |
| ФОРМИРОВАТЕЛЬ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 1992 |
|
RU2033685C1 |
Использование: в измерительной технике для преобразования угловой скорости вращения вала в частоту следования импульсов, определения направления вала. Сущность изобретения: введение трех элементов НЕ, четырехвходового элемента И и шести триггеров обеспечивает исключение ложных импульсов на границах зон срабатывания индуктивных датчиков, что повышает достверность измерения скорости. 3 ил.
ЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК СКОРОСТИ ВРАЩЕНИЯ ВАЛА, содержащий модуляционный диск, два индукционных датчика, расположены с перекрытием зон срабатывания элементами диска, генератор, подключенный к первичным обмоткам индукционных датчиков, вторичные обмотки которых соединены через детекторы с формирователями прямоугольных импульсов, отличающийся тем, что, с целью повышения достоверности за счет исключения ложных импульсов на границах зон срабатывания индукционных датчиков, в него введены три элемента НЕ, четырехвходовый элемент И и шесть триггеров, причем выход первого формирователя импульсов соединен с инверсными R-входами первого и второго триггеров, с D-входами первого, второго и третьего триггеров и через первый элемент НЕ с инверсными R-входами и D-входами четвертого и пятого триггеров, выход второго формирователя импульсов соединен с прямыми C-входами первого и четвертого триггеров, D-входом шестого триггера и через второй элемент НЕ с прямыми C-входами второго и пятого триггеров, инверсные выходы первого, второго, четвертого и пятого триггеров подключены к входам элемента И, выход которого соединен с прямым C-входом шестого триггера и через третий элемент НЕ с прямым C-входом третьего триггера, при этом выходы третьего и шестого триггеров являются выходами датчика.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
