Изобретение относится к точному приборостроению и может быть использовано в узлах, обеспечивающих перемещение объектов с шагом от нанометров до микрометров в диапазоне нескольких сантиметров и более. Оно может найти применение в различных микроскопах, микророботах, приборах, реализующих микрозондовые методы исследования (например, в туннельных микроскопах). Области применения устройства: физика поверхности, микроэлектроника, нанотехнология, оптика, биофизика, медицина.
Известно устройство [1] состоящее из последовательно расположенных пьезоэлементов и осуществляющее прижим детали, перемещающейся относительно основания к этому основанию. Набор из N пьезоэлементов, в каждом из которых при приложении напряжения V происходит смещение Δ х, позволяет получить суммарное смещение N ˙Δ x, необходимое для управления прижимом детали к основанию. Например, при отсутствии напряжения деталь прижата, а при снятии напряжения не прижата к основанию. Для работы устройства необходимо, чтобы диапазон перемещения в стопке пьезоэлементов превышал диапазон изменения величины зазора между соприкасающимися точками сжимаемых поверхностей. Эти изменения зазора связаны с микронеровностями поверхностей и в зависимости от конструкции устройства и желаемого диапазона перемещения подвижной детали могут составлять 20 мкм и более. Отсюда и требование на величину перемещения зажима более 20 мкм.
Для осуществления таких перемещений требуются довольно крупногабаритные устройства, состоящие из многих пьезоэлементов, что является недостатком устройства.
Известно устройство [2] выбранное в качестве прототипа, состоящее из пьезоэлемента, который одним концом упирается в регулировочный винт, ввинчиваемый в основание, а другим концом через закрепленную на нем опору упирается в перемещающуюся относительно основания деталь, и упругого элемента, одним концом закрепленного на основании, а другим притягивающего опору к основанию, тем самым притягивая к основанию подвижную деталь.
Когда на электроды пьезоэлемента не подано напряжение, подвижная деталь притянута к основанию упругими элементами. Когда напряжение подается на электроды пьезоэлемента, он расширяется и выжимает опору, тем самым ослабляя прижим подвижной детали к основанию. Наличие регулировочного винта позволяет устанавливать пьезоэлемент относительно подвижной детали, компенсируя неточности обработки поверхностей детали и основания. Применяемый пьезоэлемент с диапазоном перемещения ≈ 13 мкм позволяет осуществить надежную работу устройства. Однако недостатки устройства-прототипа те же, что и у аналога сложность конструкции и большие габариты.
Кроме того, обе конструкции позволяют осуществить прижим при условии тщательной обработки поверхностей трения и диапазоне перемещения пьезоэлементов, перекрывающем диапазон неровностей поверхностей трения. Если подвижная деталь, перемещаясь по основанию, переместится вследствие неровностей поверхностей в направлении, перпендикулярном поверхности, на величину большую, чем диапазон расширения пьезоэлемента, то может произойти либо заклинивание детали между пьезоэлементом и основанием, либо потеря прижима. Это приводит к ненадежности в работе устройств, где применяются описанные прижимы.
Предлагаемый зажим позволяет преодолеть указанный недостаток. С этой целью в пьезокерамическом зажиме, состоящем из пьезоэлемента, одним концом соединенного с основанием, а другим концом через закрепленную на нем опору упирающегося в подвижную относительно основания деталь, и упругого элемента, закрепленного на основании и прижимающего подвижную деталь к основанию, причем пьезоэлемент жестко закреплен на основании, подвижная деталь одним концом опирается на основание, а другим на опору, закрепленную на пьезоэлементе, а точка приложения силы со стороны упругого элемента расположена между этими опорными точками. Благодаря тому, что сила прижатия, обеспечиваемая предлагаемым пьезокерамическим зажимом, в очень малой степени зависит от неровностей и плоскостности зажимаемых поверхностей (поскольку эта сила определяется упругим элементом, имеющим рабочую длину, значительно превышающую диапазон этих неровностей), заклинивания и потеря прижима в процессе работы устройства исключаются.
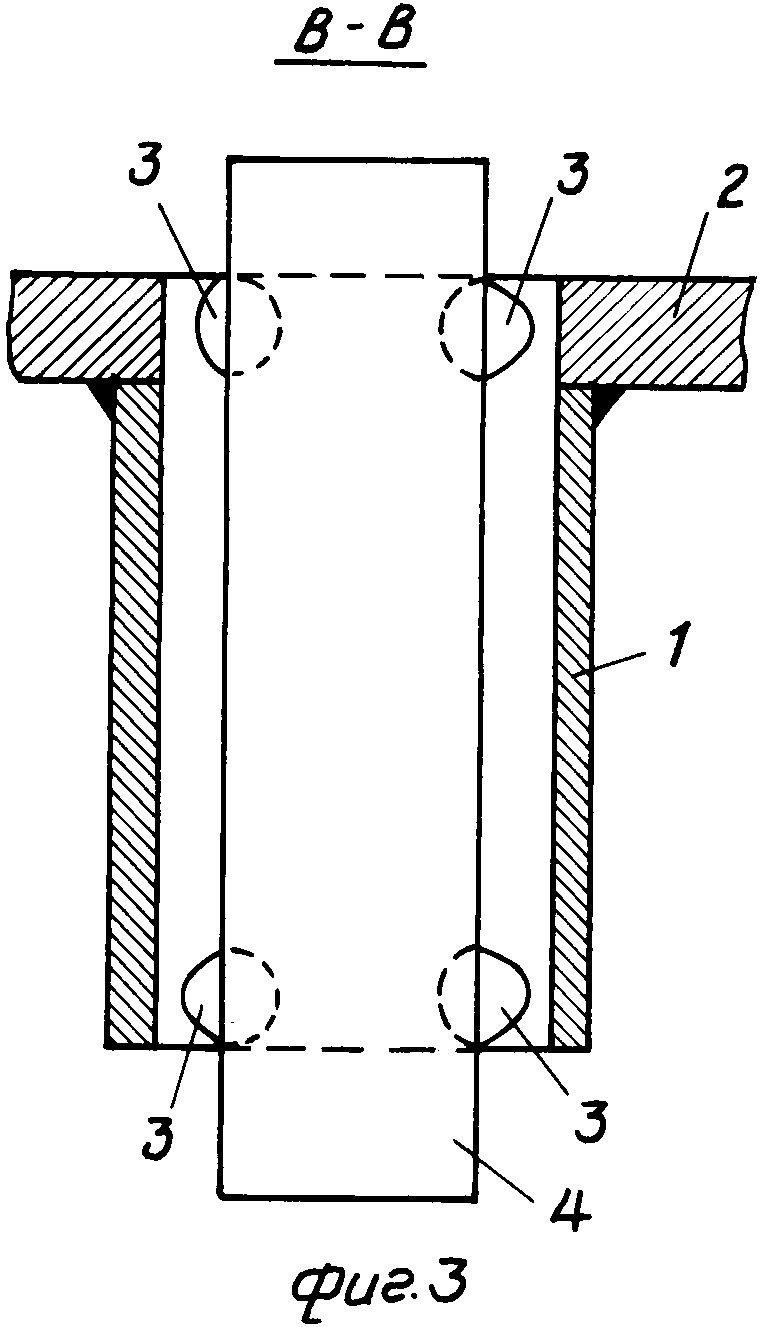
Вариант зажима изображен на фиг.1-3. Он состоит из выполненного с возможностью изгиба относительно своей оси трубчатого пьезоэлемента 1, одним концом закрепленного на основании 2, а другим концом через закрепленные на нем опоры 3 упирающегося в подвижную относительно основания 2 деталь 4, и упругого элемента 5, закрепленного на основании 2 и прижимающего подвижную деталь 4 к основанию 2 и опоре 3 пьезоэлемента 1.
Зажим работает следующим образом. Когда напряжение на электроды пьезоэлемента 1 не подано, деталь 4 прижата упругим элементом 5 к основанию 2 и опоре 3 пьезоэлемента. При подаче резкого фронта напряжения пьезоэлемент 1 изгибается и опора 3 отходит от детали 4, в то же время деталь под действием силы со стороны упругого элемента 5 начинает поворачиваться вокруг точки прижатия к основанию до тех пор, пока не упрется в отошедшую опору 3. Время этого процесса определяется моментами упругой силы и инерции подвижной детали. Во время этого процесса деталь в меньшей степени прижата к основанию, чем в начальный момент. Если на подвижную деталь 4 действовать силой в направлении линии, соединяющей опоры, то под действием этой силы подвижная деталь перемещается.
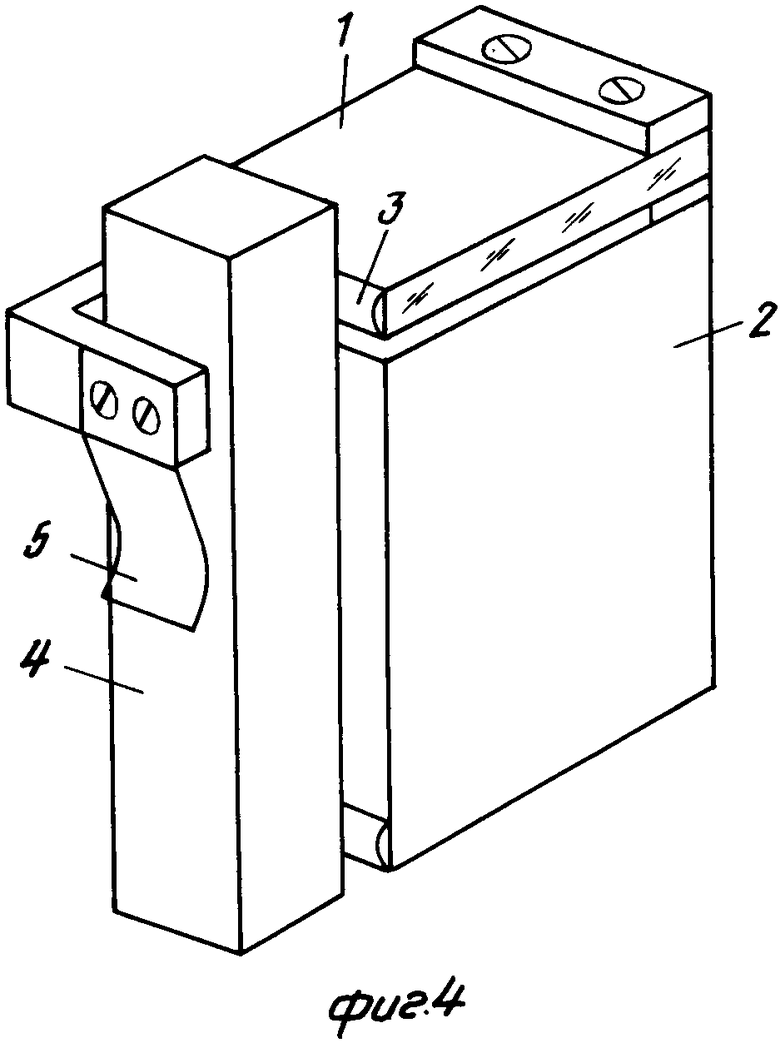
Второй вариант зажима изображен на фиг.4. Он состоит из пьезоэлемента в форме пластины 1, одним концом закрепленного на основании 2, а другим концом через закрепленные на нем опоры 3 упирающегося в подвижную относительно основания 2 деталь 4, и упругого элемента 5, закрепленного на основании 2 и прижимающего подвижную деталь 4 к основанию и опоре 3 пьезоэлемента 1.
Устройство работает следующим образом. Когда напряжение на электроды пьезоэлемента 1 не подано, деталь 4 прижата упругим элементом 5 к основанию 2 и опоре 3 пьезоэлемента. Сила трения препятствует проскальзыванию детали 4 вниз под действием силы тяжести. При подаче на пьезоэлемент резкого фронта напряжения, полярность которого соответствует направлению поперечной поляризации пьезоэлемента, пластина пьезоэлемента расширяется в поперечном направлении (по толщине), а сокращается по своей длине и опора 3 отходит от детали 4. Сила трения уменьшается и, когда становится меньше силы тяжести, деталь 4 начинает двигаться вниз. В то же время деталь 4 под действием силы со стороны упругого элемента 5 начинает поворачиваться вокруг точек прижатия к основанию до тех пор, пока не упрется в отошедшую опору 3. Время этого процесса определяется моментами упругой силы и инерции подвижной детали. В это время деталь 4 в меньшей степени прижата к основанию 2, чем в начальный момент.
Когда деталь 4 снова упрется в отошедшую опору 3, вновь возросшая сила трения останавливает движение детали 4.
При снятии напряжения пластина пьезоэлемента 1 расширяется по длине, опора 3 упирается в деталь 4 сильнее и перемещения детали 4 относительно основания 2 не происходит.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2065245C1 |
| Туннельный микроскоп | 1990 |
|
SU1721662A1 |
| Пьезоэлектрическое устройство перемещения | 1987 |
|
SU1541741A1 |
| Устройство для создания туннельного контакта | 1987 |
|
SU1585847A1 |
| Туннельный микроскоп | 1987 |
|
SU1520609A1 |
| ПОЗИЦИОНЕР ТРЕХКООРДИНАТНЫЙ | 2005 |
|
RU2297078C1 |
| Способ регулирования зазора между двумя поверхностями проводящих электродов | 1987 |
|
SU1499321A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ И КОНТРОЛЯ ЗОНДОВ | 2006 |
|
RU2358239C2 |
| ЗОНД НА ОСНОВЕ ПЬЕЗОКЕРАМИЧЕСКОЙ ТРУБКИ ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2005 |
|
RU2300150C1 |
| Зажимное приспособление | 1988 |
|
SU1646778A1 |
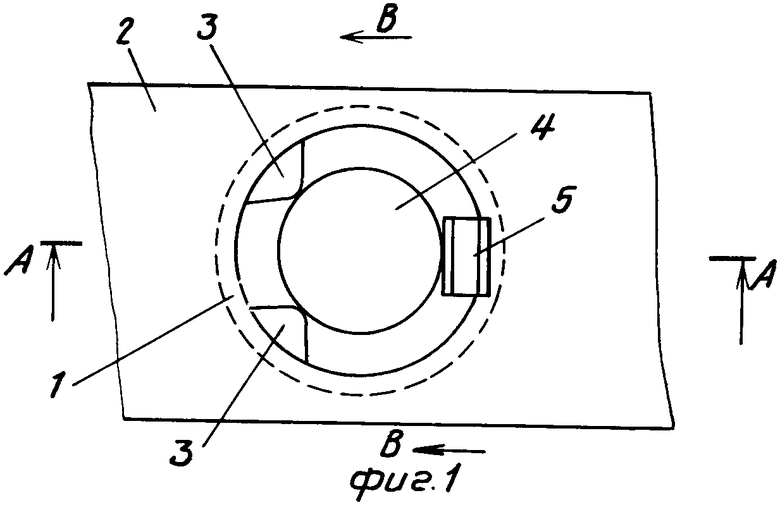
Использование: в узлах, обеспечивающих перемещение объектов с шагом от нанометров до микрометров в диапазоне нескольких сантиметров и более, а также в различных микроскопах, микророботах, приборах, реализующих микрозондовые методы исследования. Сущность изобретения: зажим состоит из выполненного с возможностью изгиба относительно своей оси трубчатого пьезоэлемента 1, одним концом закрепленного на основании 2, а другим концом через закрепленные на нем опоры 3 упирающегося в подвижную относительно основания 2 деталь 4, и упругого элемента 5, закрепленного на основании 2 и прижимающего подвижную деталь 4 к основанию 2 и опоре 3 пьезоэлемента 1. 1 з.п. ф-лы, 4 ил.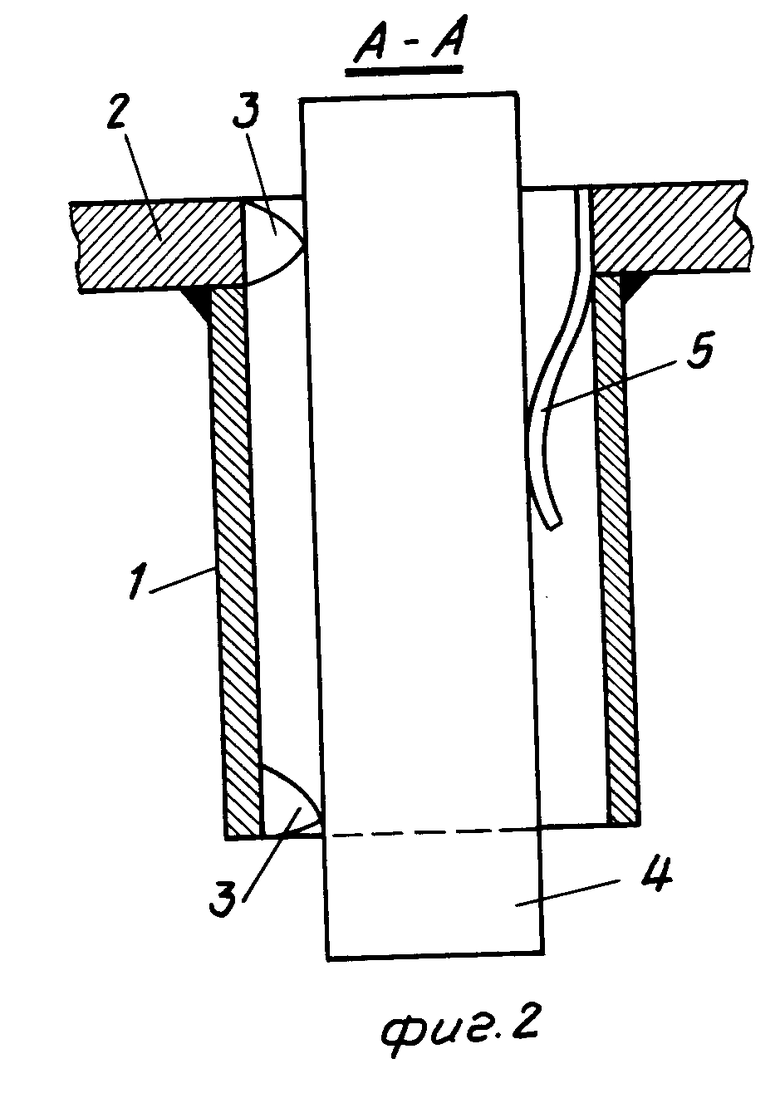
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| K | |||
| Takata et al, Rev | |||
| Ski | |||
| Instr | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
