Изобретение относится к медицине, в частности к техническим средствам для лечения некоторых болезней позвоночника.
Известна установка для подводного вытяжения (см. авт.св. СССР N 482952), содержащая фиксаторы пациента, пояс, трос, направляющие ролики, рычаг, подвижно соединенный с несущей груз кареткой и с тросом, реверсивный электропривод каретки и пульт управления. Для изменения амплитуды нагрузки груз выполнен наборным. Два концевых выключателя, взаимодействующих с кареткой в крайних ее положениях, определяют фиксированное время нарастания и уменьшения нагрузки. Время стабилизации нагрузки задается входящим в пульт управления реле времени.
Недостатки прототипа:
фиксированное время изменения нагрузки сужает функциональные возможности установки;
необходимость изменять амплитуду нагрузки за счет наборного груза, что усложняет работу медсестры, которая должна до начала процедуры установить на каретку комплект гирь по 2 кг каждая, причем потребность в коррекции первоначального груза после начала процедуры (когда пациент находится в бассейне под грузом) связана с опасностью для пациента, а это значит, что зафиксированный в бассейне пациент в случае коррекции величины груза должен повторно проделать все предварительные этапы процедуры.
Указанное изобретение является наиболее близким к предлагаемому по технической сущности и назначению и выбрано в качестве прототипа.
Цель изобретения расширение функциональных возможностей установки путем осуществления различных временных режимов изменения нагрузки по заданию врача, повышение безопасности процедуры и облегчение труда медперсонала.
Для этого в установку для подводного вытяжения позвоночника, содержащую фиксаторы и пояс пациента, трос с направляющими роликами, горизонтальный рычаг, груз, установленный на каретке с реверсивным приводом, и пульт управления приводом, включающий реле времени стабилизации нагрузки, причем пояс через трос соединен с концом рычага, вдоль которого расположен ходовой винт; введены установленные вдоль рычага магнитоуправляемые контакты, постоянный магнит, установленный на каретке, расположенные на пульте управления переключатель времени изменения нагрузки и переключатель амплитуд нагрузки, причем переключатели включены в цепь управления скоростью привода каретки, переключатель амплитуд нагрузки имеет отдельное напpавление для переключения магнитоуправляемых контактов, а число его положений равно числу магнитоуправляемых контактов, включенных в цепь реверсирования привода каретки.
Кроме того, реверсивный привод выполнен в виде электродвигателя постоянного тока, в цепь возбуждения которого введены группы резисторов, подключенных к переключателю амплитуд нагрузки, подключенному через переключатель времени изменения нагрузки к обмотке возбуждения двигателя, при этом число групп резисторов равно числу положений переключателя времени изменения нагрузки, а число резисторов в каждой группе равно числу положений переключателя амплитуд нагрузки.
Установка дополнительно снабжена щитовым ложем, установленным в ванне, на котором закреплены фиксаторы пациента и направляющие ролики.
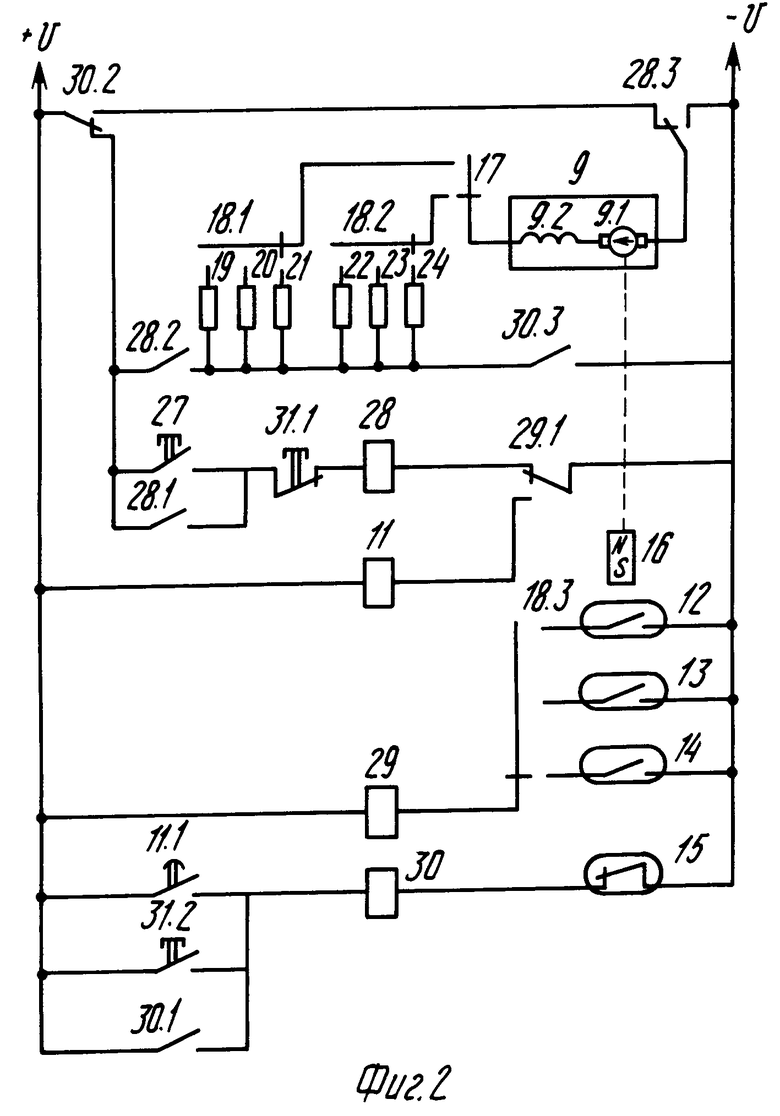
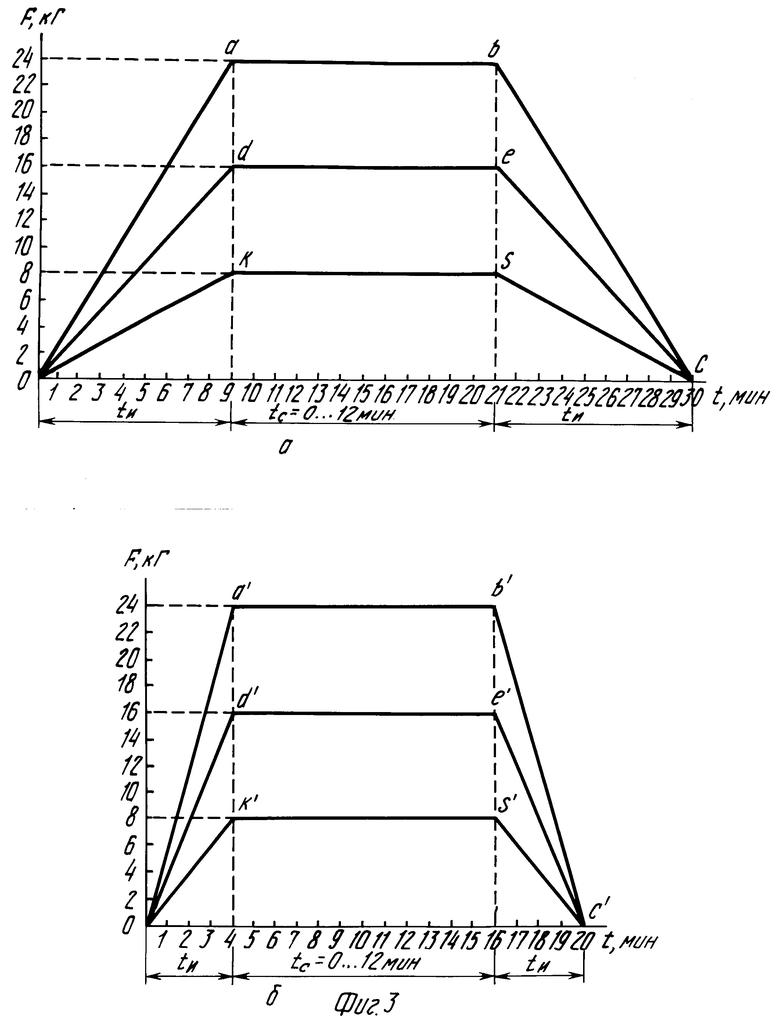
На фиг.1 изображена предлагаемая установка, общий вид; на фиг.2 принципиальная электрическая схема; на фиг.3 графики изменения нагрузки в течение процедуры.
Установка содержит фиксаторы 1 пациента, пояс 2 пациента, трос 3, направляющие ролики 4, горизонтальный рычаг 5, груз 6, каретку 7, ходовой винт 8, электродвигатель 9, включающий якорь 9.1 и обмотку возбуждения 9.2, пульт 10 управления приводом и реле 11 времени стабилизации нагрузки. В установку введены магнитоуправляемые контакты 12-15, постоянный магнит 16, переключатель 17 времени изменения нагрузки, переключатель 18 амплитуд нагрузки, который имеет три галеты 18.1-18.3. В установку также введены две группы резисторов 19-21 и 22-24 в цепи обмотки возбуждения двигателя, ванна 25 и щитовое ложе 26. Кроме того, установка содержит кнопку "Пуск" 27, реле 28 увеличения нагрузки, промежуточное реле 29, реле 30 уменьшения нагрузки, кнопку "Реверс" 31, задатчик 32 реле 11 времени стабилизации нагрузки, компенсатор 33 разницы роста пациентов, муфту 34, ось 35 вращения рычага 5 и противовес 36.
Узлы и элементы соединены следующим образом.
Груз 6 установлен на каретке 7, которая подвижно соединена с ходовым винтом 8. Пояс 2 через трос 3 соединен с концом рычага 5, вдоль которого расположен ходовой винт 8. Магнитоуправляемые контакты 12-15 расположены вдоль рычага 5. Постоянный магнит 16 установлен на каретке 7. На пульте управления расположены переключатель 17 времени изменения нагрузки и переключатель 18 амплитуд нагрузки. Переключатели 17 и 18 включены в цепь управления скоростью привода каретки 7. Переключатель амплитуд имеет отдельное направление для переключения магнитоуправляемых контактов 12-15. Число положений у переключателя амплитуд равно числу магнитоуправляемых контактов, включенных в цепь реверсирования привода каретки. Реверсивный привод выполнен в виде электродвигателя постоянного тока, в цепь возбуждения которого введены группы резисторов 19-21 и 22-24, подключенных к переключателю 18 амплитуд нагрузки, подключенному через переключатель 17 времени изменения нагрузки к обмотке возбуждения 9.2 двигателя 9. Число групп резисторов равно числу положений переключателя 17 времени изменения нагрузки, а число резисторов в каждой группе равно числу положений переключателя 18 амплитуд нагрузки. На щитовом ложе закреплены фиксаторы 1 пациента и направляющие ролики 4. Щитовое ложе 26 установлено в ванне 25.
Установка работает следующим образом.
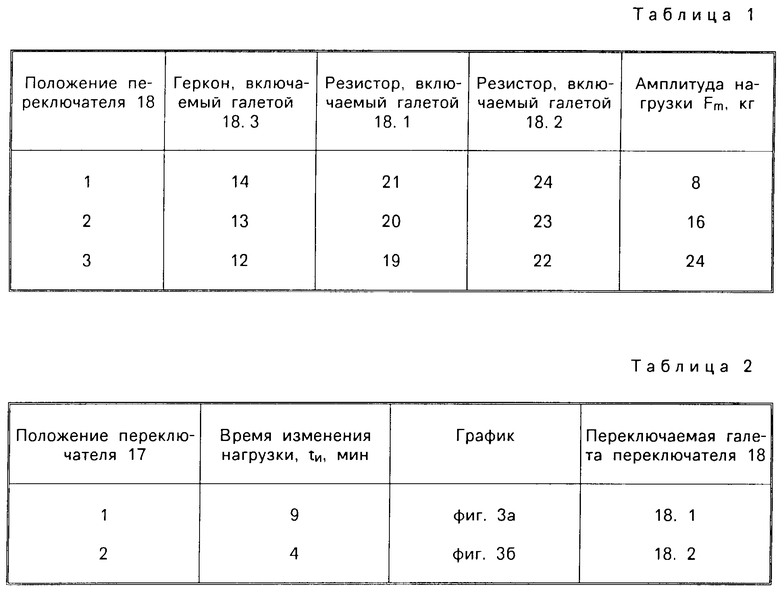
Больной, погруженный в ванну 25, удерживается на щитовом ложе 26 с помощью фиксаторов 1 (при шейном остеохондрозе используется петля Глиссона). Нагрузка на позвоночник прикладывается через пояс 2 с помощью троса 3 и направляющих роликов 4. Передачу усилия от троса к поясу удобно осуществить с помощью фиксатора пояса (см. авт. св. СССР N 485612). Трос 3 соединен с горизонтальным рычагом 5 через компенсатор 33 разницы роста пациентов, обеспечивающий рычагу 5 горизонтальное положение пеpед началом процедуры (см. авт. св. СССР N 487493). Трос 3 натягивается благодаря тому, что рычаг 5 может поворачиваться вокруг оси 35. На рычаге 5 закреплен электродвигатель 9, вал которого через муфту 34 связан с ходовым винтом 8, перемещающим вдоль рычага каретку 7, на которой установлены груз 6 и постоянный магнит 16. Этот магнит взаимодействует с магнитоуправляемыми контактами 12-15 (герконами). В момент начала пpоцедуры магнит 16 находится над герконом 15, рычаг 5 уравновешен противовесом 36 и нагрузка F равна нулю (фиг.3). Для упрощения описания на фиг.1 использованы лишь три геркона 12-14, поочередно подключаемые к схеме переключателем 18, задающим три амплитуды нагрузки в соответствии с табл.1.
Для упрощения описания на фиг. 2 переключатель 17 снабжен лишь двумя положениями для задания двух значений времени изменения нагрузки tи в соответствии с табл.2 (время нарастания нагрузки принято равным времени ее уменьшения).
Допустим, перед пуском установки медсестра устанавливает на пульте 10 заданные врачом параметры процедуры:
переключателем 17 время изменения нагрузки
tи=9 мин;
переключателем 18 амплитуду нагрузки Fm=16 кг;
задатчиком 32 реле 11 время стабилизации нагрузки tс=12 мин.
После нажатия кнопки "Пуск" 27 каретка 7 за 9 мин плавно перемещает груз 6 к подключенному геркону 13 (см. табл.1), линейно изменяя нагрузку от F=0 кг до Fm=16 кг. После срабатывания геркона 13 (под действием магнита 16) каретка 7 останавливается на время tс=12 мин. Затем электродвигатель 9 реверсируется, перемещая каретку 7 за 9 мин в исходное состояние. После срабатывания геркона 15 (при нагрузке F=0 кг) процедура окончена. Описанный выше цикл соответствует графику "оdec" на фиг.3а. Кнопка "Реверс" служит для аварийного перевода процедуры в режим уменьшения нагрузки в любой момент времени.
Электросхема работает следующим образом.
После нажатия кнопки "Пуск" 27 (см.фиг.2) срабатывает реле 28 увеличения нагрузки, блокируя себя контактом 28.1. Электродвигатель 9 включается по цепи: "+U" контакт 30.2 контакт 28.2 резистор 20 контакт галеты 18.1 переключатель 17 обмотка возбуждения 9.2 обмотка якоря 9.1 контакт 28.3 "-U". Если бы при той же амплитуде Fm=16 кг было задано время tи=4 мин, то переключатель 17 следовало бы установить в положение II для подключения вместо резистора 20 резистора 23 большего номинала, что уменьшает ток якоря и тем самым увеличивает число оборотов электродвигателя 9. Если бы при том же времени tи=9 мин была задана амплитуда Fm=8 кг, то переключатель 18 следовало бы установить в положение I для подключения вместо геркона 13 геркона 14, а вместо резистора 20 резистора 21 меньшего номинала, что увеличит ток якоря, уменьшит число оборотов двигателя и тем самым позволит каретке 7 пройти меньший путь за те же 9 мин. После того как электродвигатель 9 включен по указанной цепи, через 9 мин каретка 7 достигнет геркона 13, а нагрузка возрастет до Fm=16 кг. Магнит 16 замкнет геркон 13, сработает промежуточное реле 29, его контакт 29.1 включит реле 11 времени стабилизации нагрузки и обесточит реле 28, выключив электродвигатель 9. Через 12 мин (время установки задатчика 32) замкнется контакт 11.1 и сработает реле 30 уменьшения нагрузки, блокируя себя контактом 30.1. Тот же результат наступает после замыкания контакта 31.2 кнопки "Реверс", причем ее контакт 31.1 отключает реле 28 увеличения нагрузки. Электродвигатель 9 реверсивно включается по цепи "+U" контакт 30.2 контакт 28.3 обмотка якоря 9.1 обмотка возбуждения 9.2 переключатель 17 контакт галеты 18.1 резистор 20 контакт 30.3 "-U". Через 9 мин магнит 16 размыкает геркон 15, реле 30 обесточивается, выключая электродвигатель 9. На этом цикл процедуры заканчивается.
Следует отметить, что вместо двигателя постоянного тока для изменения скорости каретки можно применить шаговый двигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1992 |
|
RU2040230C1 |
| Установка для подводного вытяжения | 1969 |
|
SU482952A1 |
| УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2021924C1 |
| МОБИЛЬНАЯ КАРОТАЖНАЯ ЛЕБЕДКА | 2000 |
|
RU2191741C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794243C1 |
| Учебный прибор по физике | 1990 |
|
SU1720069A1 |
| Переключатель | 1979 |
|
SU782009A2 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2001 |
|
RU2195243C1 |
| Электромеханический уровнемер | 1975 |
|
SU609058A1 |
| Устройство для автоматического управления стволом гидромонитора | 1980 |
|
SU883452A1 |
Использование: изобретение относится к техническим средствам, используемым в медицине для лечения заболеваний позвоночника (остеохондроза и др. ). Сущность изобретения: установка содержит фиксаторы 1 и пояс 2 пациента, трос 3, направляющие ролики 4, рычаг 5, груз 6, установленный на каретке 7 с реверсивным приводом, и пульт управления 10. Вдоль рычага 5 установлены герконы, на каретке постоянный магнит 16, а на пульте управления переключатели времени изменения нагрузки и ее амплитуды. Оба переключателя включены в цепь управления скоростью привода. Груз соответствует максимальной амплитуде нагрузки. В приводе может быть использован двигатель постоянного тока, либо шаговый двигатель. Установка применяется при вертикальном вытяжении в бассейне, либо при горизонтальном вытяжении в ванне, снабженной щитовым ложем. 2 з.п. ф-лы, 3 ил.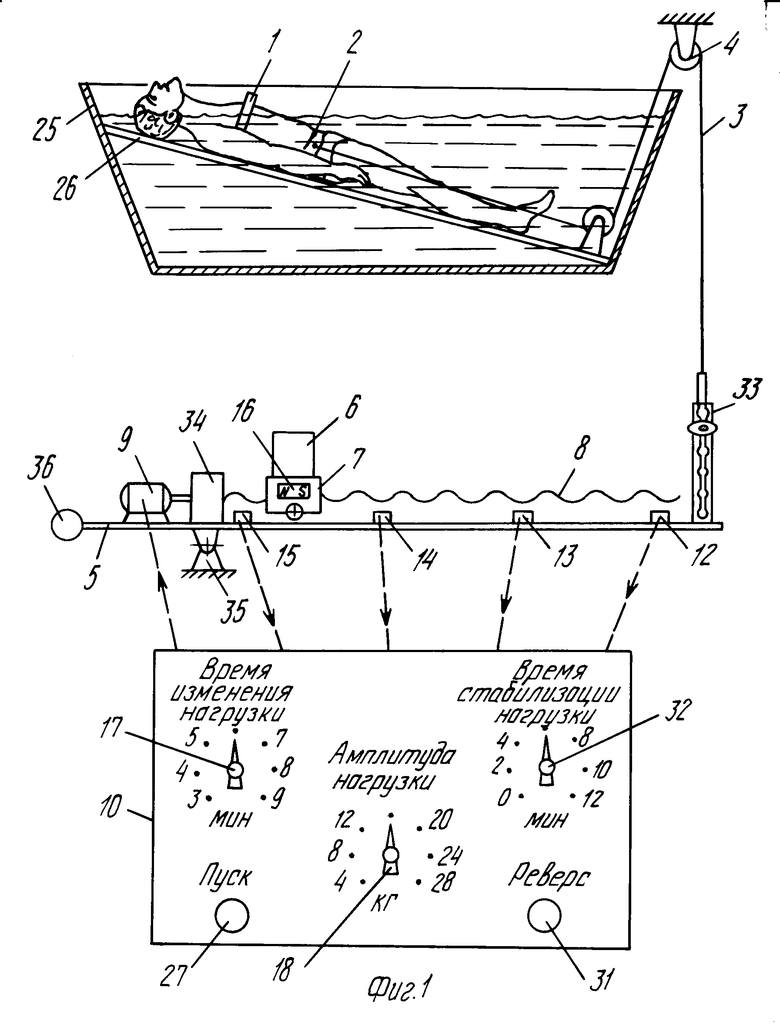
| Установка для подводного вытяжения | 1969 |
|
SU482952A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
