Изобретение относится к объединенным (маршевым и управляющим ориентацией) электрореактивным двигательным установкам (ОЭРДУ) космических аппаратов (КА) преимущественно с ядерной энергетической установкой (ЯЭУ).
Как правило, двигательные установки КА состоят из нескольких двигателей, маршевая тяга которых направлена вдоль его оси. Известен его способ создания управляющих моментов по каналам тангажа и рыскания в таких КА за счет рассогласования тяги указанных двигателей относительно заданной оси КА путем дросселирования тяги одной группы двигателей и форсирования противоположной относительно этой оси группы двигателей.
Однако указанный способ управления КА по каналам тангажа и рычания пригоден в основном при использовании двигателей со сравнительно большой тягой (типа пороховых или жидкостных ракетных двигателей).
Для КА с ЯЭУ, использующих ЭРДУ в качестве маршевых двигателей ориентации, такой способ неэффективен, так как максимальная глубина форсирования и дросселирования ЭРД типа, например, стационарного плазменного двигателя (СПД) составляет 20% (при условии не очень большого снижения удельных реактивных параметров и ресурсов СПД). Известно также, что максимальный потребный управляющий момент на КА с ЯЭУ больших размерностей составляет от одного до нескольких кгм. Так как в случае применения ЯЭУ для КА с ЭРДУ максимальная величина плеча диаметрально расположенных ЭРД ограничена угловым размером (из-за применения теневой радиационной защиты) и, как правило, не превышает 10 м, то минимальный уровень тяги для создания необходимого управляющего момента должен превышать 100 г. В то же, время форсирование на 20% ЭРД мощностью даже 25 кВт дает прирост тяги всего 25 г.
Поэтому более эффективным способом получения управляющих моментов для КА с ЯЭУ и ЭРДУ является установка ЭРД на карданном подвесе, как это сделано в упомянутой выше двигательной установке, где 12 ионных двигателей за счет шарнирного закрепления допускают поворот на угол ±10о, т.е. до 40о (двигатели повернуты на 30о для предотвращения эрозии КА от ионной струи) относительно продольной оси КА, что дает возможность, изменяя угол наклона вектора тяги симметричных относительно соответствующей оси двигателей, получить управляющий момент.
Недостатками такой ЭРДУ и, соответственно, способа получения управляющих моментов являются значительное снижение эффективной тяги маршевой двигательной установки на 10-15% а также затраты энергии на многократный поворот двигателей и пониженная надежность карданных узлов при их многоразовой работе в условиях космического вакуума.
Наиболее близким к предлагаемому изобретению является конструктивно-компоновочная схема электроактивной двигательной установки с ядерным реактором генератором электрической энергии, в которой используется лучевой принцип построения КА, позволяющий получить минимальную массу радиационной защиты [1] ЭРДУ компонуется в виде последовательно соединенных отсеков внутри конического объема, в вершине которого расположен отсек реактора-генератора. Вслед за реактором-генератором и теневой защитой располагаются преобразователи электрической энергии, двигатели ориентации и отсек маршевых ЭРД. Обычно два блока по четыре ЭРД ориентации той же размерности, что и маршевые ЭРД, размещают непосредственно за теневой радиационной защитой. Такое расположение ЭРДУ необходимо для получения максимального плеча. Момент, создаваемый двигательной установкой ориентации, составляет от 0,1 до нескольких кгм. Максимальный момент создается включением двух ЭРД ориентации по каналам тангажа и рыскания или двух ЭРД по крену.
Для некоторого снижения массы указанных ЭРД ориентации они могли бы быть выполнены двухканальными, т.е. с единой магнитной системой [2] В этом случае прототип содержал бы аноды-газораспределители и катоды, разрядные каналы, электромагнит и магнитопровод, состоящий из плоских полюсов и соединенных между собой сердечников, тракты подачи рабочего тела.
Недостатками указанного технического решения являются, во-первых, необходимость затрат энергии и рабочего тела на питание ЭРД ориентации и, во-вторых, вынужденное расположение ЭРД ориентации в "горячей" зоне, в которой температура составляет более 750оС, что значительно снижает ресурс многих узлов электрореактивных двигателей.
Технический результат предлагаемого изобретения заключается в следующем:
получить нужный управляющий момент относительно данной оси (т.е. по каналу тангажа или рыскания);
обеспечить размещение двигателей ориентации в паре с маршевыми, симметрично расположенных в виде четырех блоков относительно осей в плоскости маршевых двигателей так, чтобы включение по крайней мере одного из двигателей ориентации и выключение диаметрально противоположного аналогичного маршевого двигателя позволяло бы управлять моментом, не меняя величины маршевой тяги;
существенно снизить затраты энергии и рабочего тела при создании управляющего момента по крену при использовании трехканальных двигателей;
значительно сократить массу ОЭРДУ, а также повысить ресурс работы по сравнению с маршевой ОРДУ прототипа, так как в предлагаемом изобретении все ЭРД ориентации работают на создание маршевой тяги;
обеспечить расположение всех двигателей в "холодной" зоне КА.
В прототипе двигатели ориентации для создания необходимых по величине управляющих моментов (для увеличения плеча силы) вынуждены были располагать в "горячей" зоне (температура в зоне более 750оС) непосредственно за теневой радиационной защитой, что создавало большие трудности при конструировании ЭРД ориентации и дополнительно снижало их ресурс.
Кроме того, предлагаемые трехканальные ЭРД значительно упрощают управление КА по крену, так как оно заключается в основном в открытии клапана для подачи рабочего тела в соответствующий управляющий канал.
Технический результат достигается тем, что в объединенной электрореактивной двигательной установке для космического аппарата преимущественно с ядерной энергетической установкой [1] содержащей связку маршевых электрореактивных двигателей, расположенных симметрично относительно продольной оси установки в плоскости, перпендикулярной, и связку электроактивных двигателей ориентации аппарата по углам тангажа, рыскания и крена, связка двигателей ориентации выполнена в виде четырех блоков двигателей, симметрично расположенных в плоскости размещения маршевых двигателей, при этом попарно с двигателями ориентации расположено равное число маршевых двигателей, а остальные маршевые двигатели смонтированы равномерно в промежутках между указанными парами двигателей, причем двигатели ориентации по углу крена выполнены аналогично маршевым двигателям и установлены в паре с ними.
При этом в объединенной электрореактивной двигательной установке по крайней мере пара диаметрально расположенных маршевых двигателей, установленных в парах с двигателями ориентации по углу крена, выполнены трехканальными, один из которых маршевый, а два других ориентированы во взаимно противоположных направлениях, перпендикулярных ориентации маршевых двигателей, при этом все каналы параллельно подключены к энергетической установке.
Способ создания управляющих моментов по каналам тангажа и рыскания в указанной объединенной электрореактивной двигательной установке при поддержании номинальной величины маршевой тяги путем включения соответствующих ЭРД ориентации [2] заключается в том, что одновременно с включением одного или группы ЭРД ориентации выключают, соответственно, один или группу диаметрально противоположных маршевых ЭРД.
Кроме того, в трехканальном электрореактивном двигателе с замкнутым дрейфом электронов объединенной электрореактивной двигательной установки, содержащей маршевый и два управляющих канала с установленными в них анодами-газораспределителями, соединенными с системами подачи газа и катодами, источник магнитного поля, магнитопровод и полюсные наконечники, магнитопровод выполнен в виде Т-образно соединенных между собой сердечников, полюсные наконечники каждого канала выполнены в виде фланцев и перпендикулярно отогнутых лепестков, в которых выполнены указанные каналы, при этом в системах подачи газа в аноды-газораспределители установлены жиклеры, гидравлические сопротивления которых для маршевого и управляющих каналов соотносятся как (100К/n-1): 1, где К число трехканальных двигателей; n общее число маршевых двигателей.
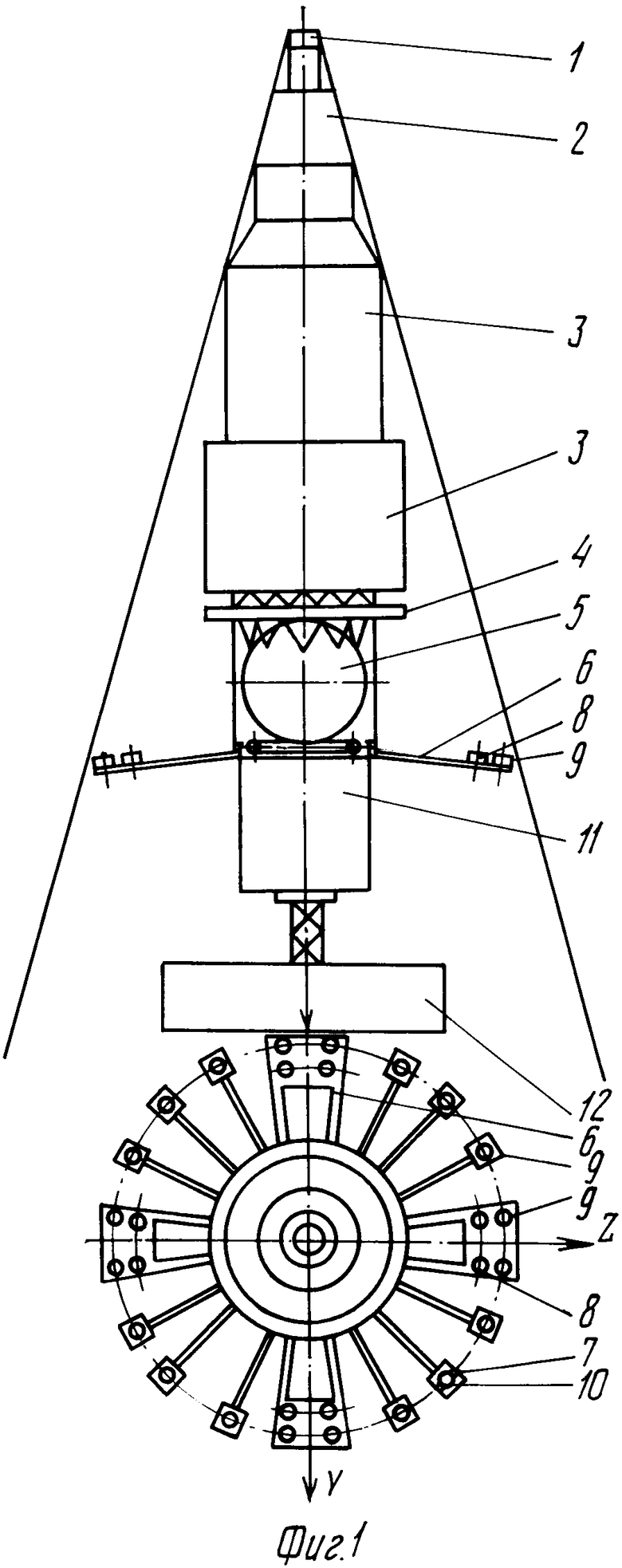
На фиг. 1 изображен межорбитального космический аппарат (буксир) с ядерной энергетической установкой 1, вырабатывающей электроэнергию для питания объединенной электрореактивной двигательной установки, расположенной за теневой радиационной защитой 2. ОЭРДУ смонтирована в относительно "холодной" зоне за холодильником-излучателем 3 и тепловым экраном 4 и состоит из системы хранения и подачи рабочего тела 5 и установленных на откидных штангах 6 электрореактивных двигателей типа СПД. Причем двигатели 8 ориентации (по каналам тангажа и рыскания) в количестве, кратном четырем (в данном случае восемь по числу двигателей ориентации в ЭРДУ прототипа), установлены по окружности (в рабочем положении) в плоскости маршевых двигателей 9 диаметрально противоположно и симметрично относительно координатных осей КА. При этом в паре с каждым из двигателей 8 ориентации расположены восемь маршевых двигателей 9, а остальные маршевые двигатели (в рассматриваемом примере 12 шт.) смонтированы равномерно в четырех промежуточных секторах окружности. Кроме того, по крайней мере одна пара из диаметрально противоположных маршевых ЭРД 10 выполнена трехканальная с основным маршевым каналом той же размерности, что и на других маршевых ЭРД, и двумя взаимно противоположными каналами 7 меньшей размерности, ось которых перпендикулярна оси основного канала и расположена в плоскости двигательной установки, причем все каналы параллельно подключены к энергетической установке. За ОЭРДУ расположены приборный отсек 11 и полезная нагрузка 12.
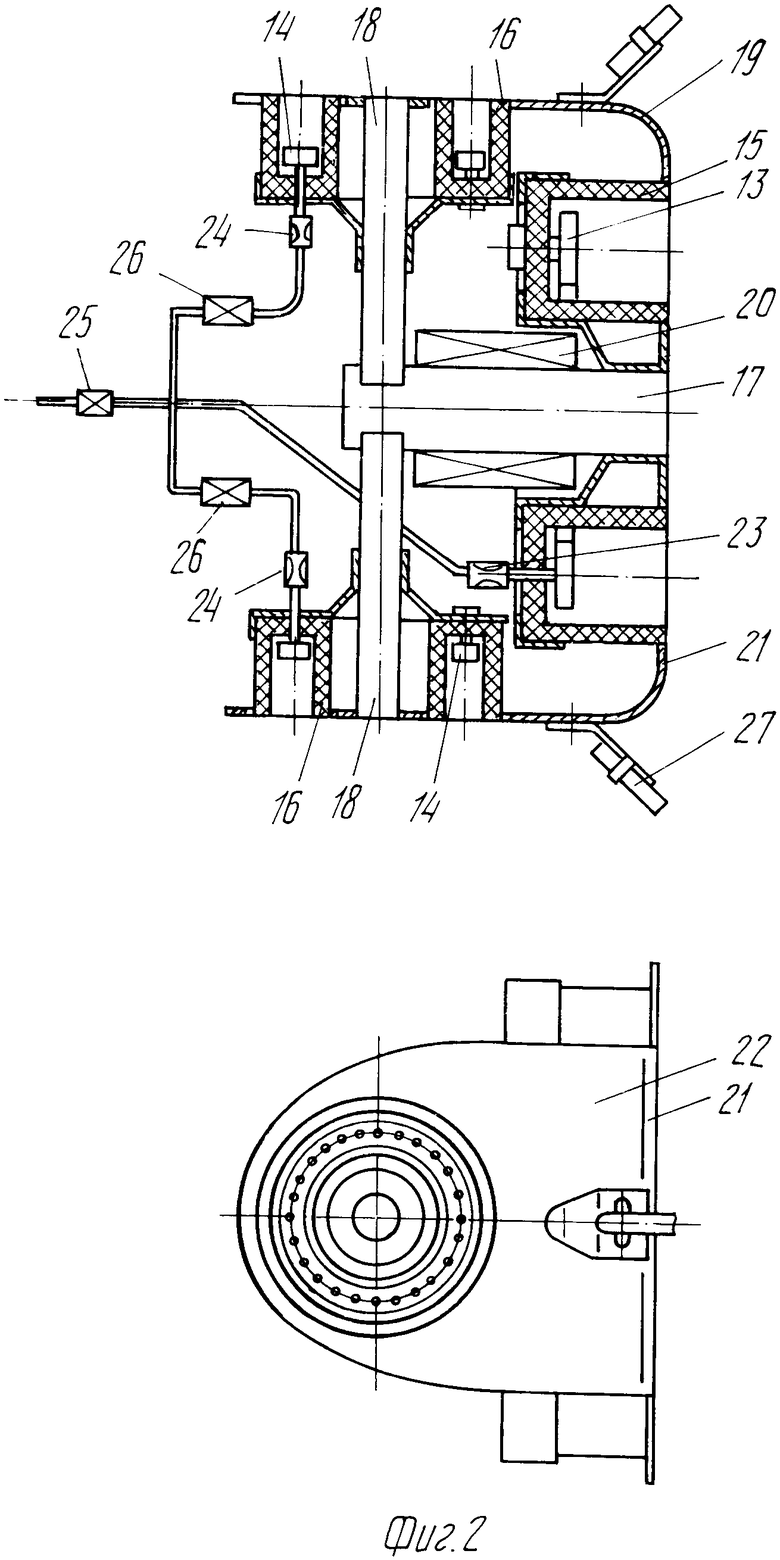
На фиг. 2 показана конструкция трехканальная ЭРД для указанной ОЭРДУ, в которой аноды-газораспределители 13 и 14 соответственно маршевого и управляющего разрядных каналов 15 и 16 установлены соосно с Т-образно соединенными сердечниками 17 и 18 магнитопровода 19. При этом площадь поперечного сечения центрального сердечника 17 маршевого канала выбрана вдвое большей, чем у периферийных сердечников 18, для обеспечения постоянства магнитного потока. Электромагнит 20 установлен на центральном сердечнике 17. Размеры маршевого 15 и управляющего 16 разрядных каналов выбраны из условия постоянства плотности тока в каналах. Так, для маршевого ЭРД типа СПД мощностью 25 кВт при среднем диаметре D 250 мм и ширине канала Н 36 мм плотность тока j равна j= I/ πDH 140 мА/см2. При одинаковых напряжении и плотности тока площадь поперечного сечения канала управляющего ЭРД составляет, например, 9 см при мощности, затрачиваемой на управление по крену, 10% от мощности маршевого ЭРД, что при диаметре канала 100 мм дает ширину 9 мм. Наружные полюса трехканального двигателя выполнены из сплава 49КФ и имеют форму центрального фланца 21 с перпендикулярно отогнутыми лепестками 22 с отверстиями под соответствующие разрядные каналы. В трактах подачи рабочего тела в аноды 13 и 14 установлены жиклеры 23 и 24 соответственно для маршевого и управляющего каналов. Соотношение их гидравлических сопротивлений (100 К/n 1):1, где К число трехканальных двигателей в ОЭРДУ; n количество маршевых ЭРД. В указанных трактах подачи рабочего тела установлены отсечные клапаны 25 и 26 соответственно для подачи рабочего тела в маршевый канал и управляющие каналы трехканального ЭРД. Между разрядными каналами 15 и 16 установлен катод 27, обеспечивающий эмиссию электронов для нейтрализации ионного потока из разрядных каналов двигателя.
Предлагаемая ОЭРДУ работает следующим образом.
При движении КА по заданной траектории работают все маршевые ЭРД, кроме резервных, на номинальном режиме. При необходимости корректировки траектории по каналам тангажа или рыскания одновременно выключают пару маршевых двигателей 9 соответственно относительно оси Y или Z и включают пару двигателей 8 ориентации, расположенных диаметрально противоположно выключенным двигателям 9 относительно нужной оси. Так как двигатели 8 и 9 аналогичны друг другу, то маршевая тяга ОЭРДУ не изменяется, а управляющий момент по каналу тангажа или рыскания, равный произведению диаметра, на котором установлены двигатели, на тягу указанной пары двигателей для рассматриваемого примера составляет величину порядка четырех кгм.
При необходимости создания управляющих моментов по каналу крена по крайней мере в двух диаметрально противоположных трехканальных двигателях 10, все три канала которых параллельно подключены к источнику электропитания (ЯЭУ 1), перераспределяют рабочее тело, снижая на величину n/K, расход в маршевые разрядные каналы 15 и одновременно подавая это рабочее тело в управляющие разрядные каналы 16, расположенные на ОЭРДУ либо по часовой, либо против часовой стрелки (как показано на фиг.1). Для указанного перераспределения рабочего тела в параллельно подключенные к источнику электропитания разрядные каналы трехканальных ЭРД 10 открывают соответствующую пару клапанов 26, и рабочее тело обратно пропорционально гидравлическим сопротивлениям жиклеров 23 и 24 распределяется между каналами указанных двигателей.
Снижение расхода в паре маршевых двигателей на величину n/K, выбрано из следующих соображений. Пусть момент по крену Мкр создается при работе К каналов (К четное число). Тогда расход Gкр рабочего тела, необходимый для создания Мкр на плече R, при удельной тяге Руд, равной удельной тяге маршевого ЭРД, равен
Gкр Мкр/Руд.R
Отношение этого расхода к расходу Gок трехканальных двигателей
Gкр/Gок Мкр/Руд ˙Gок ˙R.
Если учесть, что управление по каналам крена, рыскания и тангажа ведется с использованием ЭРД, имеющих практически одинаковую маршевую тягу и симметрично расположенных практически на одинаковых плечах R, и что для создания, например, управляющего момента Мр по каналу рыскания потребуется несимметричное включение m двигателей, то
Gкр/Gок m/К ˙Мкр/Мр
При соблюдении условия, что потери эффективной маршевой тяги ОЭРДУ составляют 1% (т.е. маршевая тяга двигательной установки в пределах точности измерения не меняется), можно показать, что
(Gкр/n M)·100 1, где
M)·100 1, где  M расход рабочего тела в один маршевый ЭРД или
M расход рабочего тела в один маршевый ЭРД или
Gкр/Gок ˙n/K 100 1 K/n ˙m/K ˙Мкр/Мр ˙100.
Окончательно можно записать
Gкр/Gок n/100 ˙K где n/K b˙ Мкр/Мр;
b коэффициент, зависящий от числа двигателей, используемых по каналам рыскания и крена;
Мкр/Мр задается при разработке системы управления КА.
Таким образом, для рассмотренного примера имеем: n 20, К 2, тогда Gкр/Gок= 1/10 и при заданном Мкр/Мр и n/K определяется коэффициент b.
Например, для рассматриваемого в примере межоpбитального буксира при Мкр/Мр 0,05 и n/K 10,b 200, т.е. m/K 2 или m 4, т.е. для создания управляющего момента по каналу рыскания (или тангажа) нужно несимметрично относительно соответствующей оси включить четыре двигателя.
Таким образом, для управления КА по крену необходимо в паре маршевых трехканальных ЭРД уменьшить расход рабочего тела в маршевые каналы на n/K, и подать рабочего тело в соответствующие управляющие каналы. Для этого в тракты подачи рабочего тела в трехканальных ЭРД установлены жиклеры 23 и 24, гидравлические сопротивления которых соотносятся как (100K/n -1):1, т.е. для рассматриваемого примера 9:1.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ МУСОРА | 1992 |
|
RU2040449C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ МУСОРА | 1992 |
|
RU2040448C1 |
| СОЛНЕЧНЫЙ ТЕПЛОВОЙ РАКЕТНЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2028503C1 |
| СПОСОБ РАЗГРУЗКИ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2028256C1 |
| ЭЛЕКТРОРЕАКТИВНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА КОСМИЧЕСКОГО АППАРАТА | 1990 |
|
RU1753775C |
| СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2006431C1 |
| КОСМИЧЕСКИЙ КОРАБЛЬ | 1992 |
|
RU2021172C1 |
| ЭЛЕКТРОРЕАКТИВНАЯ ДВИГАТЕЛЬНАЯ УСТАНОВКА | 1992 |
|
RU2024785C1 |
Изобретение относится к объединенным (маршевым и управляющим ориентаций) электрореактивным двигательным установкам (ОЭРДУ) для космических аппаратов (КА). Использование: КА с ядерной энергетической установкой. Сущность изобретения: в ОЭРДУ для КА, содержащей связку маршевых ЭРД и связку ЭРД ориентации аппарата по углам тангажа, рыскания и крена, последняя выполнена в виде четырех блоков двигателей, симметрично расположенных в плоскости размещения маршевых двигателей (МД), при этом попарно с двигателями ориентации расположено равное число МД, а остальные МД установлены равномерно в промежутках между указанными парами двигателей, причем двигатели ориентации по углу крена выполнены аналогичными МД и установлены в паре с ними. По крайней мере пара диаметрально расположенных МД, установленных в парах с двигателями ориентации по углу крена, выполнены трехканальными, один из которых маршевый, а два других ориентированы во взаимно противоположных направлениях, перпендикулярных ориентации МД, при этом все каналы параллельно подключены к энергетической установке. Способ создания управляющих моментов по каналам тангажа и рыскания заключается в том, что одновременно с включением одного или группы ЭРД ориентации выключают соответственно один или группу диаметрально противоположных МД. Кроме того, в трехканальном ЭРД с замкнутым дрейфом электронов, применяемом в данной ОРДУ, аноды-газораспределители, источник магнитного поля, магнитопровод и полюсные наконечники выполнены специальным образом, обеспечивающим упрощение управления системой ЭРД и повышение надежности системы. 3 с.п. ф-лы, 2 ил.
(100K/n 1) 1,
где K число трехканальных двигателей;
n общее число маршевых двигателей.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Там же, с.80. | |||
