Изобретение относится к космической технике и может быть использовано для разгрузки системы силовых гироскопов (СГ) космических аппаратов (КА) от накопленного кинетического момента.
Известен способ разгрузки системы СГ КА с помощью реактивных двигателей ориентации (ДО) [1]. В нем разгрузка осуществляется по выходу системы СГ в режим насыщения вектора-функции  кинетического момента путем приложения разгрузочного момента от ДО. Использование реактивных ДО приводит к расходам рабочего тела, запасы которого на борту КА не восполнимы или требуют значительных затрат на его доставку.
кинетического момента путем приложения разгрузочного момента от ДО. Использование реактивных ДО приводит к расходам рабочего тела, запасы которого на борту КА не восполнимы или требуют значительных затрат на его доставку.
Известен способ разгрузки системы силовых гироскопов космического аппарата, наиболее близкий по технической сущности к предлагаемому изобретению, включающий измерение вектора накопленного кинетического момента  в системе СГ, измерение вектора абсолютной угловой скорости КА
в системе СГ, измерение вектора абсолютной угловой скорости КА  , определение суммарного вектора накопленного кинетического момента КА
, определение суммарного вектора накопленного кинетического момента КА  , приложение разгрузочного момента от силы давления светового потока [2].
, приложение разгрузочного момента от силы давления светового потока [2].
Сила светового давления  , действующая на КА в точке, названной центром светового давления, определяется на основании соотношения:
, действующая на КА в точке, названной центром светового давления, определяется на основании соотношения:  = P
= P 1-
1-  cos v
cos v -2εocos2v
-2εocos2v dS , где Pсв - световое давление; εo - коэффициент отражения поверхности КА; V - угол падения солнечных лучей, т. е. угол между ортом
dS , где Pсв - световое давление; εo - коэффициент отражения поверхности КА; V - угол падения солнечных лучей, т. е. угол между ортом  - нормаль к площадке и ортом -
- нормаль к площадке и ортом -  - направление пучка солнечных лучей; S - поверхность аппарата, освещенная Солнцем. Момент от светового давления
- направление пучка солнечных лучей; S - поверхность аппарата, освещенная Солнцем. Момент от светового давления  определяется в соответствии с выражением:
определяется в соответствии с выражением:  =
=  ×
×  , где
, где  - радиус-вектор центра светового давления, берущий начало из центра масс КА. Таким образом при условии Pсв и
- радиус-вектор центра светового давления, берущий начало из центра масс КА. Таким образом при условии Pсв и  - const,
- const,  является функцией ориентации КА.
является функцией ориентации КА.
Недостаток данного способа заключен в необходимости поддержания строго заданной для разгрузки системы СГ ориентации КА. Кроме того, к недостаткам можно отнести также невозможность выполнения разгрузки на теневой части орбиты КА; невозможность выполнения разгрузки для КА, конструкция которых такова, что центр масс КА и центр светового давления находятся в одной точке; невозможность выполнения разгрузки в тех случаях, когда другие составляющие главного вектора возмущающего момента (гравитационная, аэродинамическая и т.д.) превышают (иногда на порядки величин) значения  .
.
Целью изобретения является обеспечение разгрузки системы СГ без затрат ресурсов КА и расширение области использования для КА произвольной конструкции.
Достигается это тем, что в способе разгрузки системы силовых гироскопов (СГ) космического аппарата (КА), включающем измерение вектора накопленного кинетического момента  в системе СГ, измерение вектора абсолютной угловой скорости КА
в системе СГ, измерение вектора абсолютной угловой скорости КА  , определение суммарного вектора накопленного кинетического момента КА
, определение суммарного вектора накопленного кинетического момента КА  , приложение разгрузочного момента от силы давления светового потока, фиксируют местоположение управляемого источника светового потока, в инерциальном базисе, непрерывно определяют ориентацию рабочей поверхности КА в инерциальном базисе, совмещают линию действия светового потока с направлением на КА, формируют первый световой импульс минимальной длительности, определяют по времени между выдачей светового импульса и приемом отраженного сигнала, а также по местоположению источника и направлению линии действия светового потока радиус-вектор (
, приложение разгрузочного момента от силы давления светового потока, фиксируют местоположение управляемого источника светового потока, в инерциальном базисе, непрерывно определяют ориентацию рабочей поверхности КА в инерциальном базисе, совмещают линию действия светового потока с направлением на КА, формируют первый световой импульс минимальной длительности, определяют по времени между выдачей светового импульса и приемом отраженного сигнала, а также по местоположению источника и направлению линии действия светового потока радиус-вектор (  ) центра масс КА с началом в точке фиксированного местоположения источника светового излучения, через интервал дифференцирования Δ τ радиуса-вектора дальности центра масс КА относительно фиксированного местоположения источника формируют повторный световой импульс минимальной длительности и определяют по нему радиус-вектор
) центра масс КА с началом в точке фиксированного местоположения источника светового излучения, через интервал дифференцирования Δ τ радиуса-вектора дальности центра масс КА относительно фиксированного местоположения источника формируют повторный световой импульс минимальной длительности и определяют по нему радиус-вектор  , определяют в инерциальном базисе радиус-вектор (
, определяют в инерциальном базисе радиус-вектор ( ), с началом в центре масс КА, точки приложения вектора силы светового давления (
), с началом в центре масс КА, точки приложения вектора силы светового давления ( ) на поверхности КА, момент от которой противоположно направлен вектору
) на поверхности КА, момент от которой противоположно направлен вектору  , определяют радиус-вектор (
, определяют радиус-вектор ( ) точки приложения вектора силы по выражению:
) точки приложения вектора силы по выражению: =
=  +
+  +
+  ·Δtp , где Δ tp - постоянная, характеризующая время наведения управляемого источника светового излучения в точку, определенную радиусом-вектором
·Δtp , где Δ tp - постоянная, характеризующая время наведения управляемого источника светового излучения в точку, определенную радиусом-вектором 
 ·
·  > 0 определяют положение радиуса-вектора
> 0 определяют положение радиуса-вектора  в связанном базисе КА, проверяют выполнение условий
в связанном базисе КА, проверяют выполнение условий  · n > 0 и
· n > 0 и 
 > 0, где
> 0, где  - радиус-вектор
- радиус-вектор  в связанном базисе КА,
в связанном базисе КА,  - нормаль к рабочей поверхности точки приложения вектора силы Pр, при их выполнении, совмещают линию действия светового потока с радиусом-вектором
- нормаль к рабочей поверхности точки приложения вектора силы Pр, при их выполнении, совмещают линию действия светового потока с радиусом-вектором  и формируют третий импульс разгрузки СГ, по измеренным текущим значениям
и формируют третий импульс разгрузки СГ, по измеренным текущим значениям  (t) и
(t) и  (t) определяют векторы
(t) определяют векторы  (t) и повторяют цикл из трех импульсов светового потока до выполнения условия:
(t) и повторяют цикл из трех импульсов светового потока до выполнения условия: = 0 где PΣ = (1+r)
= 0 где PΣ = (1+r)
 P
P - вектор результирующей силы светового давления потока в точке приложения силы Pр, где r - коэффициент отражения светового потока, Pс - сила светового давления потока, а в случае
- вектор результирующей силы светового давления потока в точке приложения силы Pр, где r - коэффициент отражения светового потока, Pс - сила светового давления потока, а в случае  = 0 или невыполнения условия
= 0 или невыполнения условия  ·
·  > 0 сопровождают КА, совмещая направление светового потока с направлением на центр масс КА до выполнения этих условий.
> 0 сопровождают КА, совмещая направление светового потока с направлением на центр масс КА до выполнения этих условий.
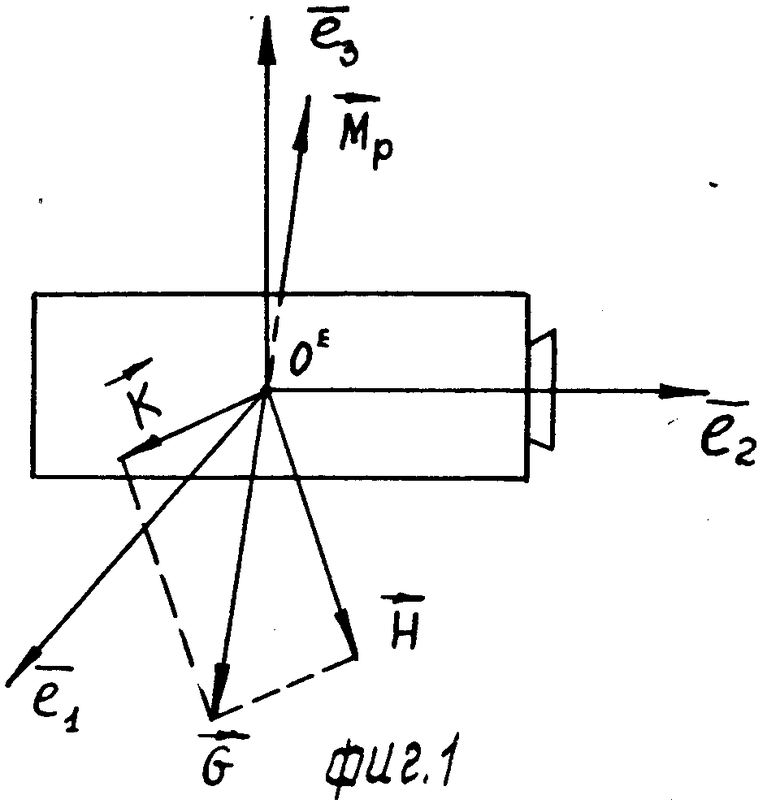
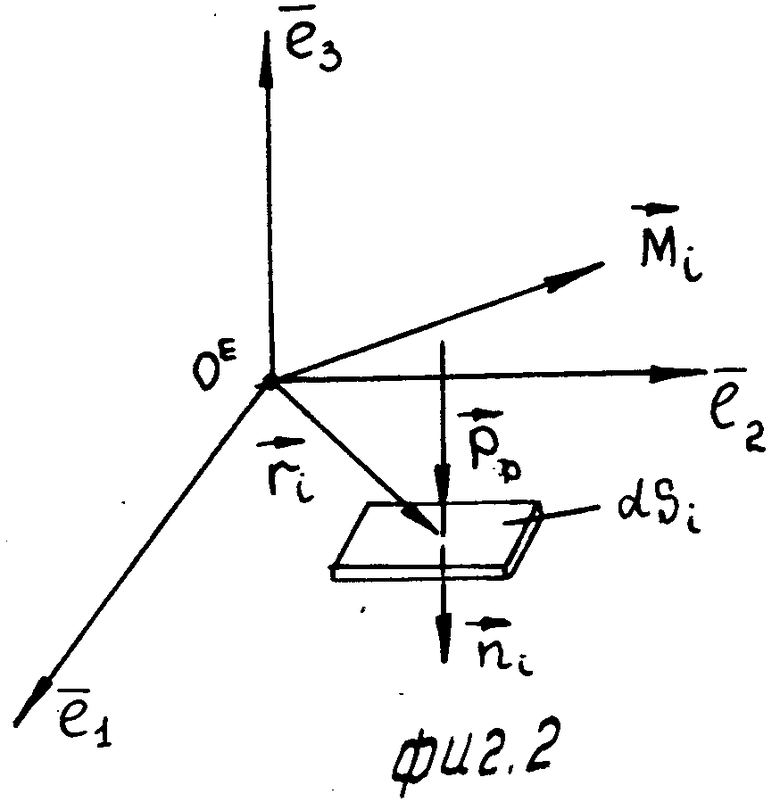
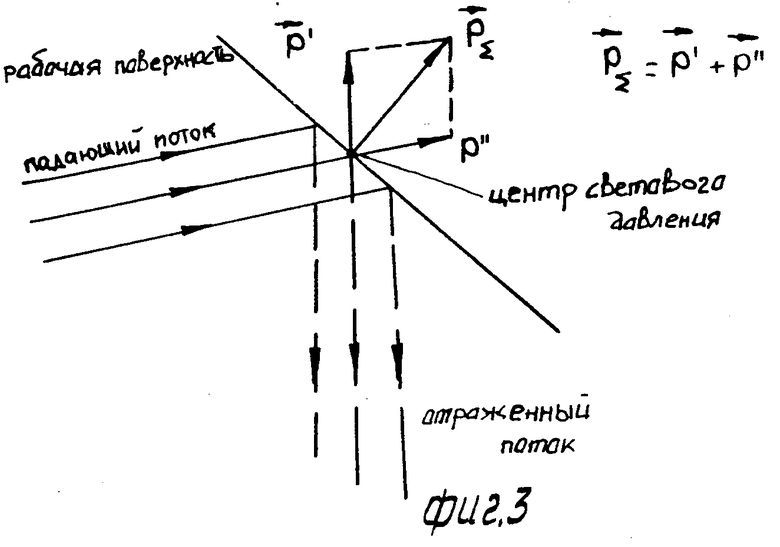
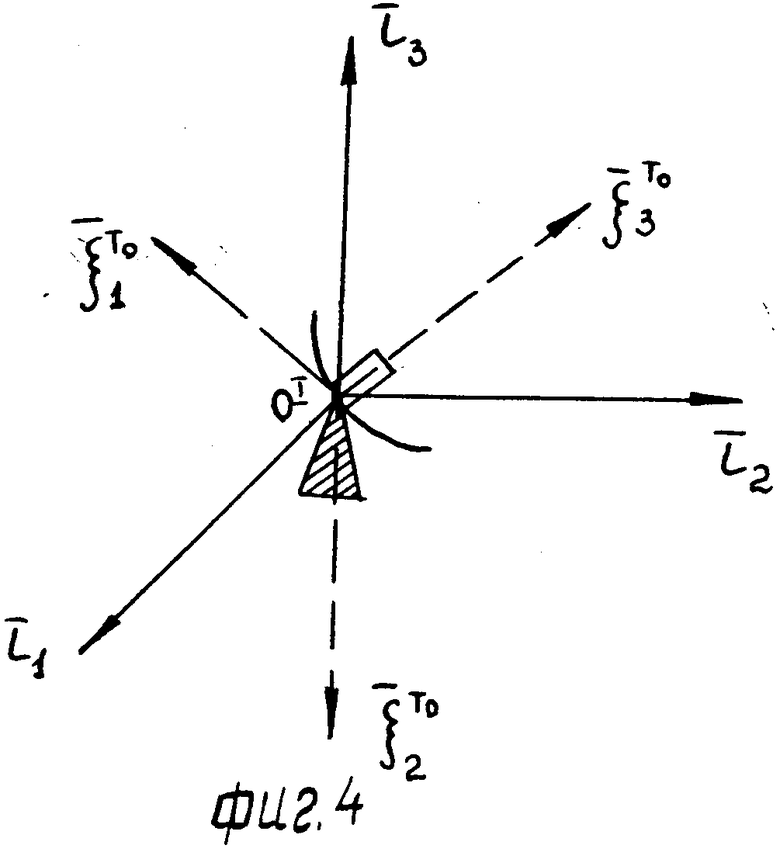
На фиг. 1 показано соотношение момента разгрузки Mр и накопленного кинетического момента G; на фиг. 2 - характеристики каждой элементарной площадки dSi корпуса КА; на фиг. 3 - графически представлено свойство давления светового потока; на фиг. 4 - положение источника направленного светового излучения в инерциальной системе координат; на фиг. 5 - процесс оптических траекторных измерений; на фиг. 6 - процесс определения  ; на фиг. 7 - проверка двух условий приложения силы
; на фиг. 7 - проверка двух условий приложения силы  в точке dSс радиусом-вектором
в точке dSс радиусом-вектором  ; на фиг. 8 - цикл приложения трех импульсов.
; на фиг. 8 - цикл приложения трех импульсов.
Способ разгрузки системы СГ КА осуществляется следующим образом.
Пусть в результате выполнения динамической части полета КА накоплен кинетический момент  . Для разгрузки необходимо к корпусу КА приложить разгрузочный момент
. Для разгрузки необходимо к корпусу КА приложить разгрузочный момент  , противоположно направленный вектору G (фиг. 1), который формируется путем приложения силы разгрузки
, противоположно направленный вектору G (фиг. 1), который формируется путем приложения силы разгрузки  в точке на корпусе КА с радиусом-вектором
в точке на корпусе КА с радиусом-вектором  , при этом
, при этом  =
=  .
. Радиус-вектор
Радиус-вектор  , имеющий начало в центре масс КА, выбирается из следующих соображений: каждая элементарная площадка на корпусе КА dSi (фиг. 2) имеет характеристики:
, имеющий начало в центре масс КА, выбирается из следующих соображений: каждая элементарная площадка на корпусе КА dSi (фиг. 2) имеет характеристики:  - радиус-вектор dSi, берущий начало в центре масс КА,
- радиус-вектор dSi, берущий начало в центре масс КА,  - нормаль к dSi. При приложении по нормали к dSi силы
- нормаль к dSi. При приложении по нормали к dSi силы  момент
момент  , создаваемый этой силой, равен
, создаваемый этой силой, равен  =
=  .
. . Следовательно, каждой dSiкроме того, соответствует момент силы
. Следовательно, каждой dSiкроме того, соответствует момент силы  , у которой
, у которой  =
=  .Таким образом, выборка
.Таким образом, выборка  осуществляется из множества
осуществляется из множества  с условием максимального приближения
с условием максимального приближения  к
к  при постоянной силе
при постоянной силе  .
.
Из вышесказанного вытекает необходимость формирования силы разгрузки  . Предлагается использовать с этой целью свойство давления светового потока (фиг. 3).
. Предлагается использовать с этой целью свойство давления светового потока (фиг. 3).
Для этого выбирается управляемый источник направленного светового излучения, местоположение которого фиксируется в точке OI начала инерциальной системы координат 1 (фиг. 4). Положение источника относительно системы координат I характеризуют две его оси чувствительности  o и
o и  o. С КА связывается система координат E, начало которой OE находится в центре масс аппарата (фиг. 1).
o. С КА связывается система координат E, начало которой OE находится в центре масс аппарата (фиг. 1).
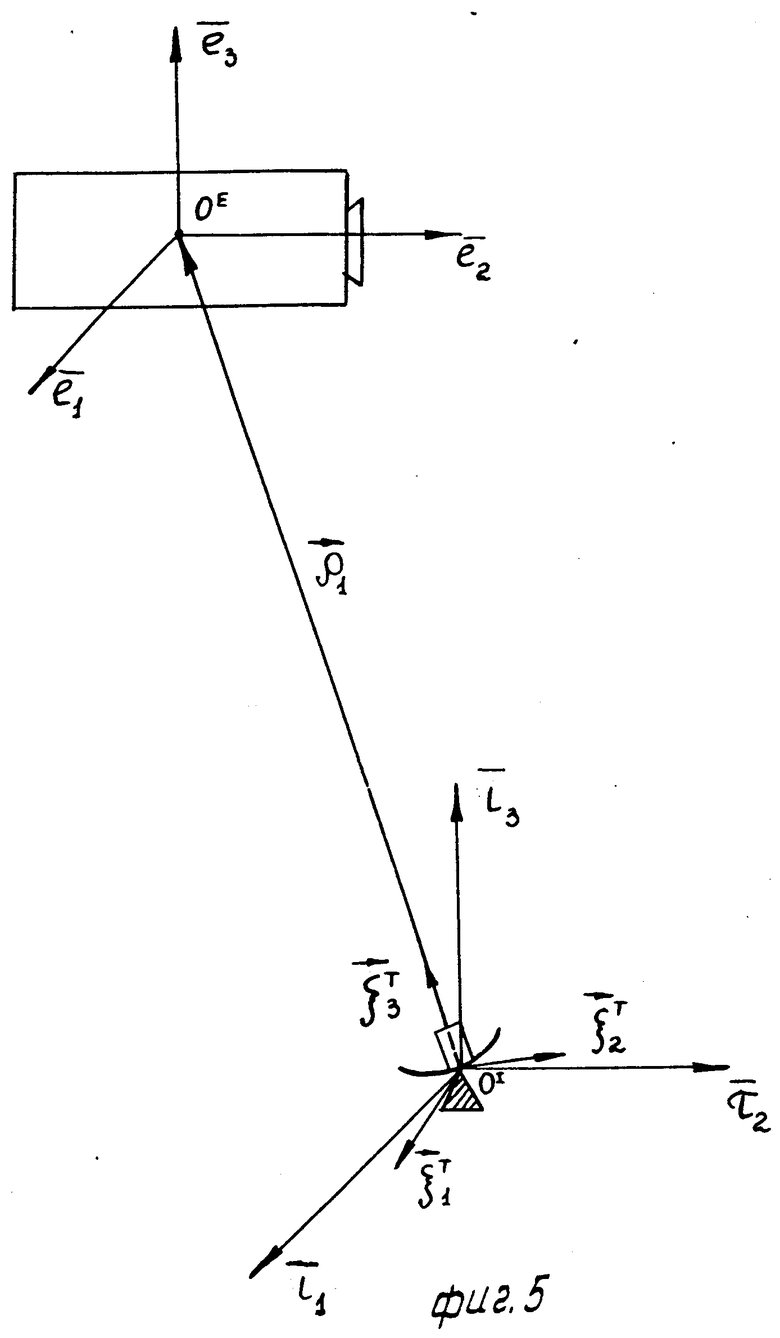
Далее решается задача оптических траекторных измерений (фиг. 5). Пусть начальное взаимное положение базисов 1 и ζ характеризует кватернион Λ (To), тогда  Λ(To)
Λ(To) (To). Путем вращения источника вокруг осей
(To). Путем вращения источника вокруг осей  o и
o и  o наводится линия действия светового потока
o наводится линия действия светового потока  o на КА. Пусть кватернион Λ(T) характеризует данное положение источника, тогда
o на КА. Пусть кватернион Λ(T) характеризует данное положение источника, тогда  = Λ(To)o·τ3
= Λ(To)o·τ3 (T) . Выдается первый световой направленный импульс высокой энергии длительностью несколько наносекунд. Сигнал, отражаясь от КА, возвращается на высокочувствительную детектирующую установку источника, при этом точно фиксируется промежуток времени между выходом сигнала и его возвращением. Используя известное значение скорости распространения света и измеренное время, можно вычислить расстояние D(T) до центра масс спутника в момент наблюдения. Отсюда с учетом местоположения источника и направления линии действия светового потока определяется в базисе 1 радиус-вектор
(T) . Выдается первый световой направленный импульс высокой энергии длительностью несколько наносекунд. Сигнал, отражаясь от КА, возвращается на высокочувствительную детектирующую установку источника, при этом точно фиксируется промежуток времени между выходом сигнала и его возвращением. Используя известное значение скорости распространения света и измеренное время, можно вычислить расстояние D(T) до центра масс спутника в момент наблюдения. Отсюда с учетом местоположения источника и направления линии действия светового потока определяется в базисе 1 радиус-вектор  центра масс КА, берущий начало в точке OI:
центра масс КА, берущий начало в точке OI: = Д(T)
= Д(T)
Через интервал времени Δ τ (несколько милисекунд) выдается повторный импульс и определяется  :
:  = Д(T+Δτ)
= Д(T+Δτ) , где
, где  = Λ(T+Δτ)
= Λ(T+Δτ) (T+Δτ). По определенным радиус-векторам
(T+Δτ). По определенным радиус-векторам  и
и  вычисляется радиальная скорость КА относительно источника
вычисляется радиальная скорость КА относительно источника  :
: =
=  . В момент времени (T + Δτ ) также определяется по вышеизложенному алгоритму радиус-вектор
. В момент времени (T + Δτ ) также определяется по вышеизложенному алгоритму радиус-вектор  в базисе E и затем переводится в базис 1. Пусть кватернион N (T + Δτ) определяет текущую ориентацию КА относительно источника излучения, тогда
в базисе E и затем переводится в базис 1. Пусть кватернион N (T + Δτ) определяет текущую ориентацию КА относительно источника излучения, тогда  ±= N(T+Δτ)
±= N(T+Δτ)
 (T+Δτ) . Далее в базисе 1 определяется радиус-вектор
(T+Δτ) . Далее в базисе 1 определяется радиус-вектор  (фиг. 6) точки приложения силы
(фиг. 6) точки приложения силы  , берущий начало в точке O1 по выражению:
, берущий начало в точке O1 по выражению: =
=  +
+  +
+  tp где Δ tp - постоянная величина, определяющая момент времени (T+ Δ τ + Δ tp) выдачи третьего разгрузочного импульса, которая может быть подобрана экспериментально с учетом фиксированной ориентации КА в течение Δ tp . Затем определяется радиус-вектор
tp где Δ tp - постоянная величина, определяющая момент времени (T+ Δ τ + Δ tp) выдачи третьего разгрузочного импульса, которая может быть подобрана экспериментально с учетом фиксированной ориентации КА в течение Δ tp . Затем определяется радиус-вектор  в базисе E(
в базисе E( ' ) по выражению:
' ) по выражению: =
=  (T+ Δτ)
(T+ Δτ) N(T+ Δτ) и проверяются два условия приложения силы
N(T+ Δτ) и проверяются два условия приложения силы  в точке dS, определенной радиусом-вектором
в точке dS, определенной радиусом-вектором  (фиг. 7):
(фиг. 7): ·
·  > 0 (1)
> 0 (1) ·
·  > 0 (2) Если условия (1) и (2) выполняются, что соответствует условию разгрузки СГ с помощью
> 0 (2) Если условия (1) и (2) выполняются, что соответствует условию разгрузки СГ с помощью  , то совмещается линия действия светового потока
, то совмещается линия действия светового потока  с
с  и выдается третий разгрузочный импульс, равнодействующая сила ((
и выдается третий разгрузочный импульс, равнодействующая сила (( ) ) которого равна
) ) которого равна = (I + r)
= (I + r) ·
·  Pc·
Pc·  где r - коэффициент отражения светового потока; Pc - сила светового давления потока, равная: Pc = p .S, где p - давление потока; S - площадь пятна направленного светового потока на поверхности КА.
где r - коэффициент отражения светового потока; Pc - сила светового давления потока, равная: Pc = p .S, где p - давление потока; S - площадь пятна направленного светового потока на поверхности КА.
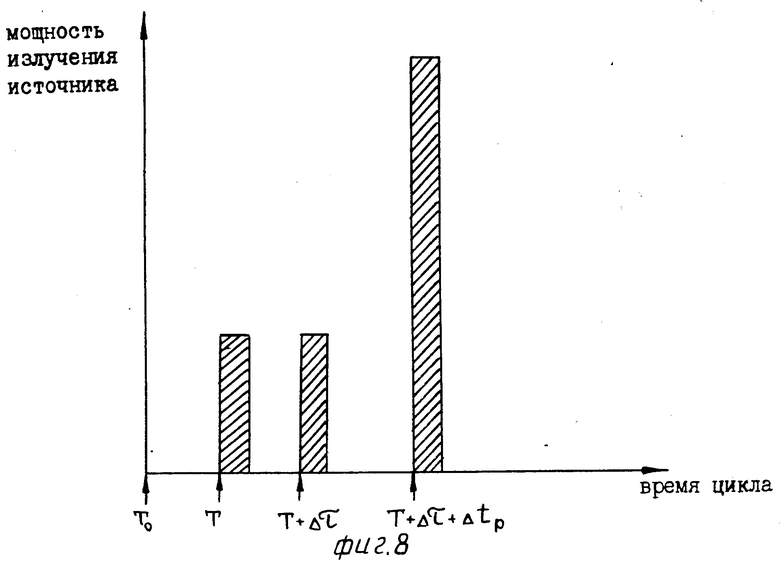
После выполнения цикла из трех импульсов (фиг. 8) определяется текущее  (T) и в случае невыполнения условия
(T) и в случае невыполнения условия 
 = 0 (3) вышеуказанный цикл приложения трех импульсов повторяется (фиг. 8). Условие (3) предусматривает три варианта его выполнения:
= 0 (3) вышеуказанный цикл приложения трех импульсов повторяется (фиг. 8). Условие (3) предусматривает три варианта его выполнения: = 0, цели разгрузки СГ достигнуты (нет необходимости в приложении силы Pp);
= 0, цели разгрузки СГ достигнуты (нет необходимости в приложении силы Pp); = 0, наведение светового потока в расчетную точку приложения силы невозможно в силу существующих технических ограничений;
= 0, наведение светового потока в расчетную точку приложения силы невозможно в силу существующих технических ограничений; 
 Если же условия (1) и (2) не выполняются, то цикл повторяется без выдачи разгрузочного импульса до выполнения условий (1) и (2) и выдачи третьего импульса.
Если же условия (1) и (2) не выполняются, то цикл повторяется без выдачи разгрузочного импульса до выполнения условий (1) и (2) и выдачи третьего импульса.
Для реализации данного способа в качестве управляемого источника направленного светового потока возможно использование оптического квантового генератора (ОКГ) (он же лазер) с двухосной системой наведения, установленного в плоскости орбиты КА. В последние годы круг задач, решаемых с помощью ОКГ, значительно расширился.
Для реализации данного способа также предполагается, что системы отсчета углов ориентации КА и источника излучения построены по бескарданной схеме. Это дает возможность непрерывно интегрировать уравнения движения ориентируемого объекта при сколь угодно сложном характере его движения, определяя в каждый момент времени текущий кватернион, описывающий взаимное положение базисов.
Задачи обмена информацией между КА и лазерно-локационной станцией в предложенном способе разгрузки решаются с помощью командно-измерительного комплекса.
С целью усиления ответного сигнала, предотвращения местного перегрева КА, повышения  , на корпусе КА предварительно определяются области воздействия пучка ОКГ с коэффициентом отражения, близким к единице. В качестве рабочих поверхностей воздействия также могут использоваться установленные на КА призменные отражатели, зеркала-мишени с двухстепенными приводами.
, на корпусе КА предварительно определяются области воздействия пучка ОКГ с коэффициентом отражения, близким к единице. В качестве рабочих поверхностей воздействия также могут использоваться установленные на КА призменные отражатели, зеркала-мишени с двухстепенными приводами.


Изобретение относится к космической технике и может быть использовано для разгрузки системы силовых гироскопов (СГ) космических аппаратов (КА) от накопленного кинетического момента. Целью изобретения является обеспечение разгрузки системы СГ без затрат ресурсов КА и расширение области использования для КА произвольной конструкции. Это достигается за счет приложения к КА внешней управляемой силы светового давления от источника излучения, функционально независимого от бортовых ресурсов КА. 1 п.ф. 8 ил.
СПОСОБ РАЗГРУЗКИ СИСТЕМЫ СИЛОВЫХ ГИРОСКОПОВ КОСМИЧЕСКОГО АППАРАТА (КА), включающий измерение вектора накопленного кинетического момента  в системе гироскопов (СГ), измерение вектора абсолютной угловой скорости
в системе гироскопов (СГ), измерение вектора абсолютной угловой скорости  определение суммарного вектора накопленного кинетического момента
определение суммарного вектора накопленного кинетического момента  приложение разгрузочного момента от силы давления светового потока, отличающийся тем, что, с целью обеспечения разгрузки системы СГ без затрат ресурсов КА и расширения области использования для КА произвольной конструкции, фиксируют местоположение управляемого источника светового потока в инерциальном базисе, непрерывно определяют ориентацию рабочей поверхности КА в инерциальном базисе, совмещают линию действия светового потока с направлением на КА, формируют первый световой импульс минимальной длительности, определяют по времени между выдачей светового импульса и приемом отраженного сигнала, а также по местоположению источника и направлению линии действия светового потока радиус-вектор
приложение разгрузочного момента от силы давления светового потока, отличающийся тем, что, с целью обеспечения разгрузки системы СГ без затрат ресурсов КА и расширения области использования для КА произвольной конструкции, фиксируют местоположение управляемого источника светового потока в инерциальном базисе, непрерывно определяют ориентацию рабочей поверхности КА в инерциальном базисе, совмещают линию действия светового потока с направлением на КА, формируют первый световой импульс минимальной длительности, определяют по времени между выдачей светового импульса и приемом отраженного сигнала, а также по местоположению источника и направлению линии действия светового потока радиус-вектор  центра масс КА с началом в точке фиксированного местоположения источника светового излучения, через интервал дифференцирования Δτ радиус-вектора дальности центра масс КА относительно фиксированного местоположения источника формируют повторный световой импульс минимальной длительности и определяют радиус вектор
центра масс КА с началом в точке фиксированного местоположения источника светового излучения, через интервал дифференцирования Δτ радиус-вектора дальности центра масс КА относительно фиксированного местоположения источника формируют повторный световой импульс минимальной длительности и определяют радиус вектор  определяют в инерциальном базисе радиус-вектор
определяют в инерциальном базисе радиус-вектор  с началом в центре масс КА, точки приложения вектора силы светового давления
с началом в центре масс КА, точки приложения вектора силы светового давления  на поверхности КА, момент от которой противоположно направлен вектору
на поверхности КА, момент от которой противоположно направлен вектору  определяют радиус-вектор
определяют радиус-вектор  точки приложения вектора силы по выражению
точки приложения вектора силы по выражению
где ΔtР - постоянная, характеризующая время наведения источника светового излучения в точку, определенную радиус-вектором 
определяют положение радиус-вектора  в связанном базисе КА, проверяют выполнение условий
в связанном базисе КА, проверяют выполнение условий
где  - радиус-вектор
- радиус-вектор  в связанном базисе КА;
в связанном базисе КА; - нормаль к рабочей точке поверхности приложения вектора силы
- нормаль к рабочей точке поверхности приложения вектора силы 
при их выполнении совмещают линию действия светового потока с радиус-вектором  и формируют третий импульс разгрузки СГ, по измеренным текущим значениям
и формируют третий импульс разгрузки СГ, по измеренным текущим значениям  определяют векторы
определяют векторы  и повторяют цикл из трех импульсов светового потока до выполнения условия
и повторяют цикл из трех импульсов светового потока до выполнения условия
где  - вектор результирующей силы светового давления потока в точке приложения силы
- вектор результирующей силы светового давления потока в точке приложения силы  где r - коэффициент отражения светового потока, Pс - сила светового давления потока, а в случае
где r - коэффициент отражения светового потока, Pс - сила светового давления потока, а в случае  или невыполнения условия
или невыполнения условия  сопровождают КА, совмещая направление светового потока с направлением на центр масс КА, до выполнения этих условий.
сопровождают КА, совмещая направление светового потока с направлением на центр масс КА, до выполнения этих условий.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Раушенбах Б.В | |||
| и др | |||
| Управление ориентацией КА | |||
| - М.: Наука, 1974, с.101-103, 126-127, 174-175. | |||
