Изобретение относится к космической технике и может использоваться для эффективного управления угловым положением космических аппаратов.
Существует много систем для осуществления пространственного разворота космического аппарата. В аналогичной системе управления пространственным разворотом КА в требуемое конечное угловое положение вращение КА осуществляется по назначенным траекториям согласно концепции управления по ускорению.
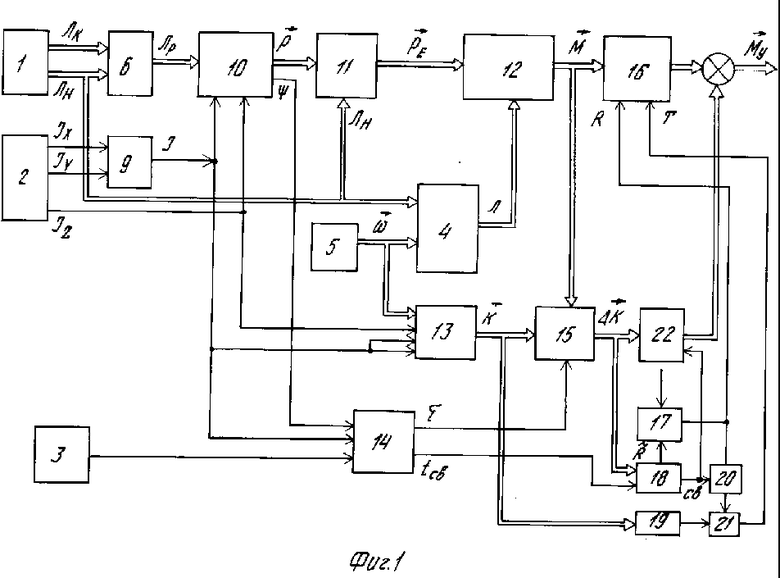
Ближайшей по технической сущности является система управления пространственным разворотом КА, представленная функциональной блок-схемой на фиг. 1, где 1 - блок задания начального и конечного положений, 2 - блок задания моментов инерции, 3 - задатчик времени разворота, 4 -бесплатформенная инерциальная навигационная система (БИНС), 5 - блок датчиков угловых скоростей (БДУС), 6 - блок определения параметров разворота, 7 - блок определения момента инерции вокруг поперечной оси, 8 - блок определения вектора разворота, 9 - блок определения направления разгонного импульса, 10 - блок формирования момента управления, 11 - блок определения кинетического момента, 12 - блок определения времени разгона (торможения), 13 - блок определения отклонения кинетического момента от расчетного, 14 - блок формирования разгонного и тормозного импульсов, 15 - блок формирования команды на разгон, 16 - блок формирования команды на свободное вращение, 17 - блок формирования команды на торможение, 18 - схема ИЛИ, 19 - схема ИСКЛЮЧАЮЩЕЕ ИЛИ, 20 - блок формирования корректирующего момента.
Система-прототип формирует моменты управления таким образом, чтобы кинетический момент сохранял в абсолютном пространстве свое направление неизменным во все время разворота. Движение состоит из участков, где действует максимальный момент m0 (участки разгона и торможения КА) и участка свободного движения, на котором кинетический момент КА остается постоянным.
Недостатком системы прототипа является необходимость отслеживать в процессе разворота назначенную заранее траекторию, для которой управляющие моменты формируются из требования совершения объектом регулярной прецессии, что требует дополнительных затрат топлива.
Целью изобретения является уменьшение затрат топлива на разворот динамически симметричного КА, а также обеспечение управления разворотом динамически несимметричного КА.
Цель достигается тем, что в систему управления пространственным разворотом КА, содержащую БИНС, БДУС, блок задания начального и конечного положений, блок задания моментов инерции, задатчик времени разворота, блок определения параметров разворота, блок прогноза вектора разворота, блок определения момента инерции вокруг поперечной оcи, блок определения кинетического момента, блок определения времени разгона (торможения), блок определения направления разгонного импульса, блок формирования момента управления, блок определения отклонения кинетического момента от расчетного, блок формирования разгонного и тормозного импульсов, блоки формирования управляющей команды на разгон, торможение и свободное вращение КА, схемы ИЛИ и ИСКЛЮЧАЮЩЕЕ ИЛИ, задатчик команды на начало разворота, в отличие от прототипа введены блок обновления параметров разворота, блок определения промаха разворота, блок коррекции параметров разворота, блок формирования команды на запоминание вектора разворота, блок запоминания вектора разворота, блок определения направления тормозного импульса, блок запоминания и коммутации вектора разворота, задатчик допустимой ошибки разворота.
В предлагаемой системе управляющие моменты формируются только при разгоне и торможении объекта. В системе автоматически определяется такой требуемый импульс кинетического момент  , сообщение которого корпусу КА гарантирует достижение через заданное время ТК требуемого углового положения λK с допустимой точностью ε доп.
, сообщение которого корпусу КА гарантирует достижение через заданное время ТК требуемого углового положения λK с допустимой точностью ε доп.
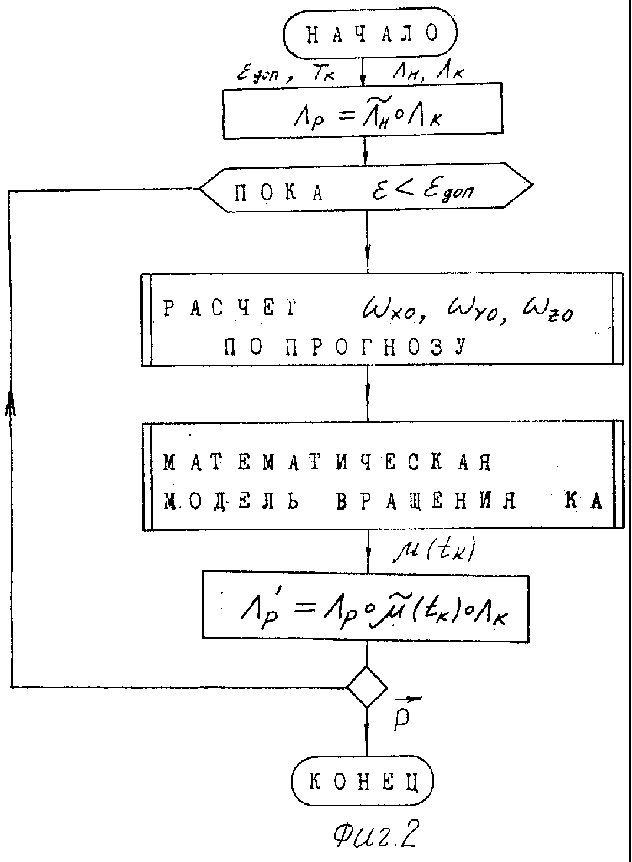
Отличительной особенностью системы является наличие в ней математической модели вращательного движения твердого тела в поле тяготения Земли, которая входит в блок определения промаха разворота ΔΛ=  (tk). Расчет требуемого кинетического момента
(tk). Расчет требуемого кинетического момента  носит итерационный характер и описывается алгоритмом, представленным блок-схемой на фиг. 2.
носит итерационный характер и описывается алгоритмом, представленным блок-схемой на фиг. 2.
Математическая модель вращательного движения твердого тела в предлагаемой системе описывается системой уравнений: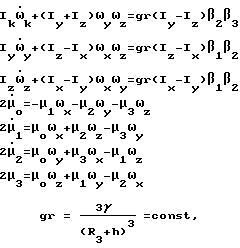 где γ - гравитационная постоянная Земли;
где γ - гравитационная постоянная Земли;
R3 - радиус Земли;
h - высота орбиты КА;
β1, β2, β3, - направляющие косинусы между радиус-вектором и связанными осями;
β1 = 2(λ1от˙λ2от-λ0от λ3от);
β2 = 1-2(λ1от + λ3от);
β3 = 2(λ0от˙λ1от-λ2от λ3от);
Λот= Λор˙μ (t), где λ ;
;
λ
λ ;
;
ωop=  - орбитальная угловая скорость КА.
- орбитальная угловая скорость КА.
Направление  считается найденным, когда ε=
считается найденным, когда ε=  εдоп (в идеале ε -> 1).
εдоп (в идеале ε -> 1).
Наличие в системе прогнозирующей модели в виде блока определения промаха разворота и организация итерационного процесса поиска расчетного направления 

 делает ее существенно отличной от системы-прототипа.
делает ее существенно отличной от системы-прототипа.
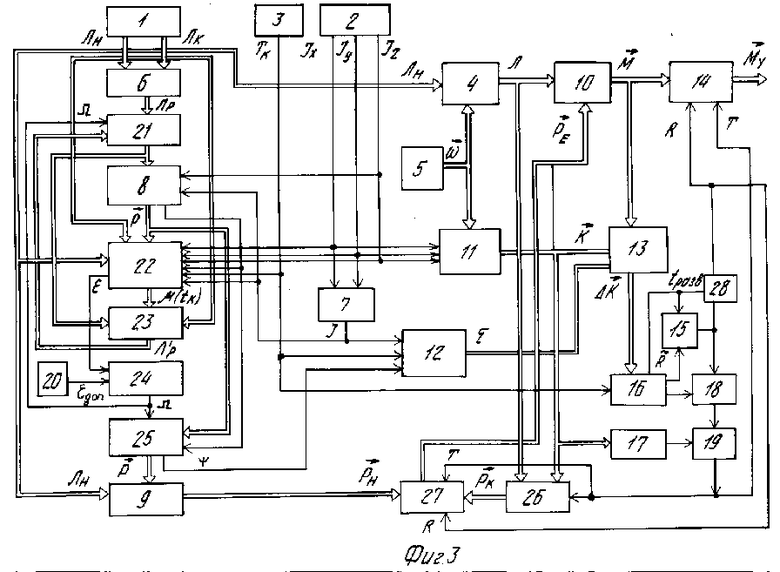
Блок-схема системы представлена на фиг. 3, где обозначено: 1 - блок задания начального и конечного положений, 2 блок задания моментов инерции, 3 - задатчик времени разворота, 4 - бесплатформенная инерциальная навигационная система (БИНС), 5 - блок датчиков угловых скоростей (БДУС), 6 - блок определения параметров разворота, 7 - блок определения момента инерции вокруг поперечной оси, 8 - блок определения вектора разворота, 9 - блок определения направления разгонного импульса, 10 - блок формирования момента управления, 11 - блок определения кинетического момента, 12 - блок определения времени разгона (торможения), 13 - блок определения отклонения кинетического момента от расчетного, 14 - блок формирования разгонного и тормозного импульсов, 15 - блок формирования команды на разгон, 16 - блок формирования команды на свободное вращение, 17 - блок формирования команды на торможение, 18 - схема ИЛИ, 19 - схема ИСКЛЮЧАЮЩЕЕ ИЛИ, 20 - задатчик допустимой ошибки разворота, 21 - блок обновления параметров разворота, 22 - блок определения промаха разворота, 23 - блок коррекции параметров разворота, 24 - блок формирования команды на запоминание вектора разворота, 25 - блок запоминания вектора разворота, 26 - блок определения направления тормозного импульса, 27 - блок запоминания и коммутации вектора разворота, 28 - задатчик команды на начало разворота.
Реализация отдельных блоков и элементов предлагаемой системы выполнена на интегральных схемах и стандартных аналоговых модулях.
Рассмотрим работу системы.
Блок 6 вычисляет кватернион разворота по формуле λр=  . Блок 7 усредняет моменты инерции вокруг поперечных осей Ix и Iy по выражению
. Блок 7 усредняет моменты инерции вокруг поперечных осей Ix и Iy по выражению
I =  (Ix+Iy)
(Ix+Iy)
Блок 8 в зависимости от условий разворота выбирает один из трех вариантов:
1) разворот вокруг продольной оси.
Этому случаю соответствует
λ 1р = λ 2р = 0,
поэтому Px = Py = 0, Pz = 1
2) развоpот вокруг поперечной оси.
Этому случаю соответствует
λ 3р = 0,
Px=  , Py=
, Py=  , Pz= 0
, Pz= 0
Для обоих случаев угол разворота Ψ= π- 2 arcsin λ 0р
3) косой разворот в остальных случаях
Px = sin θ sin ϕ , Py = sin θ cos ϕ,
Pz = cos θ
Ψ =  -arcsin
-arcsin , где θ определяется из уравнения
, где θ определяется из уравнения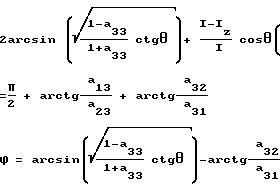
 -arcsin
-arcsin  =
=
a13 = 2 (λoр λ2р + λ1р λ3р);
a23 = 2 (λ2р λ3р - λ0р λ1р);
a31 = 2 (λ1р λ3р - λ0р λ2р);
a32 = 2 (λ2р λ3р + λ0р λ1р);
a33 = 1-2 (λ1р2 + λ2р2);
Блок 24 реализует математическую модель вращательного движения твердого тела в гравитационном поле Земли. Начальные условия Λ н = Λ(о) и  определяются начальным положением и вектором разворота, а также инерционными характеристиками Ix, Iy, Iz, I, углом разворота Ψ и временем разворота Тк. Требуемую на начало участка свободного движения угловую скорость определяют согласно соотношениям
определяются начальным положением и вектором разворота, а также инерционными характеристиками Ix, Iy, Iz, I, углом разворота Ψ и временем разворота Тк. Требуемую на начало участка свободного движения угловую скорость определяют согласно соотношениям
ωox=  Px, ωoy=
Px, ωoy=  Py, ωoz=
Py, ωoz=  Pz
Pz
Ориентация связанных осей относительно орбитальной системы координат определяется как
Λотн = Λор˙μ
Направляющие косинусы определяются по следующим зависимостям:
β1= 2(λ (t)λ
(t)λ (tk)·λk. Блок 26 сравнивает ε с допустимым ε доп. Как только логический сигнал на выходе блока пропадет и итерационный процесс, реализованный блоками 23, 8, 24, 25, прекращается.
(tk)·λk. Блок 26 сравнивает ε с допустимым ε доп. Как только логический сигнал на выходе блока пропадет и итерационный процесс, реализованный блоками 23, 8, 24, 25, прекращается.
Блок 27 выполняет логическое отрицание и хранение угла разворота Ψ и вектора разворота  .
.
Блок 28 определяет направление фактического кинетического момента в связанном с КА базисе  =
=  , а затем это направление пересчитывается из связанного базиса в инерциальный по выражению
, а затем это направление пересчитывается из связанного базиса в инерциальный по выражению  =
=  .
.
Блок 29 подает на выход либо направление разгонного импульса  (если R = "1"), либо направление тормозного импульса
(если R = "1"), либо направление тормозного импульса  (если Т = "1"). Если оба сигнала отсутствуют R = T = "0", то на выходе блока установится нулевой вектор
(если Т = "1"). Если оба сигнала отсутствуют R = T = "0", то на выходе блока установится нулевой вектор  = 0.
= 0.
Блок 9 реализует соотношение  =
= 
Блок 12 вычисляет потребный момент управления  , исходя из фактического углового положения Λ и вектора разворота
, исходя из фактического углового положения Λ и вектора разворота  . Реализует функцию
. Реализует функцию  = m
= m .
.
Блок 11 осуществляет умножение вектора на диагональную матрицу по выражению  = diag(Ix, Ig, Iz)
= diag(Ix, Ig, Iz) ; Kx= Ixωx, Κy= Iyωy; Kz= Izωz; Блок 12 вычисляет время разгона (торможения) τ и время свободного вращения tсв по формулам
; Kx= Ixωx, Κy= Iyωy; Kz= Izωz; Блок 12 вычисляет время разгона (торможения) τ и время свободного вращения tсв по формулам
τ =  (1-
(1- ) , tсв= Tк
) , tсв= Tк
Блок 13 вычисляет расчетный кинетический момент  =
=  , вычитает его из фактического
, вычитает его из фактического  .
.
Блок 14 коммутирует с выходом  либо
либо  (если R = "1"), либо -
(если R = "1"), либо -  (если Т = "1"). При отсутствии сигналов R и T (R = T = "0") на выходе блока будет нулевой вектор
(если Т = "1"). При отсутствии сигналов R и T (R = T = "0") на выходе блока будет нулевой вектор  = 0.
= 0.
Блок 15 представляет собой схему логического И.
Блок 16 при подаче разрешения на разворот (tразв = "1") изменяется  и растет сигнал t. Так как Δ К2 > 0, то
и растет сигнал t. Так как Δ К2 > 0, то  = "1". ТК> t, поэтому св = 0. По мере течения времени t растет и момент, когда t ≥ TК, устанавливается св = "1".
= "1". ТК> t, поэтому св = 0. По мере течения времени t растет и момент, когда t ≥ TК, устанавливается св = "1".
Блок 19 состоит из блока возведения вектора  в квадрат и компаратора. Сигнал на выходе компаратора будет соответствовать логической "1" до тех пор, пока
в квадрат и компаратора. Сигнал на выходе компаратора будет соответствовать логической "1" до тех пор, пока  ≠ 0. В момент полной остановки (
≠ 0. В момент полной остановки ( = 0) компаратор устанавливает на выходе блоке логический "0".
= 0) компаратор устанавливает на выходе блоке логический "0".
Система работает следующим образом.
Прежде всего определяется момент инерции вокруг поперечной оси блоком 7. По начальному Λ н и конечному Λ к положениям в блоке 6 определяется кватернион разворота Λ р. Согласно полученному Λ р и инерционным характеристикам I и Iz, блоком 8 выдается угол прецессии Ψ и направление кинетического момента  в связанной системе координат. Далее в блоке 24 моделируется движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинетический момент в полученном направлении
в связанной системе координат. Далее в блоке 24 моделируется движение объекта в ускоренном масштабе времени в предположении, что ему сообщили кинетический момент в полученном направлении  ; определяется величина промаха разворота ε и кватернион μ(Тк ). Пока ε < εдоп, фактическое угловое положение μ (tк), полученное моделированием в блоке 24, сравнивается с требуемым Λ К и рассчитывается блоком 25 новый кватернион разворота, который через блок 23 поступает в качестве исходных данных в блок 8, рассчитывается новое направление
; определяется величина промаха разворота ε и кватернион μ(Тк ). Пока ε < εдоп, фактическое угловое положение μ (tк), полученное моделированием в блоке 24, сравнивается с требуемым Λ К и рассчитывается блоком 25 новый кватернион разворота, который через блок 23 поступает в качестве исходных данных в блок 8, рассчитывается новое направление  и т. д. Процесс повторяется. Как только ε ≥ εдоп , блок 27 запоминает полученные в блоке 10 угол прецессии Ψ и направление кинетического момента
и т. д. Процесс повторяется. Как только ε ≥ εдоп , блок 27 запоминает полученные в блоке 10 угол прецессии Ψ и направление кинетического момента  . Далее это направление пересчитывается блоком 9 в направление относительно инерциального базиса
. Далее это направление пересчитывается блоком 9 в направление относительно инерциального базиса  по формуле
по формуле  = Λно
= Λно д
д . Запомненный угол прецессии Ψ служит исходным для определения времени разгона (торможения) τ . По фактическому угловому положению, определенному блоком 4, определяется действующий момент
. Запомненный угол прецессии Ψ служит исходным для определения времени разгона (торможения) τ . По фактическому угловому положению, определенному блоком 4, определяется действующий момент  = m
= m , по которому в блоке 12 вычисляется расчетный кинетический момент
, по которому в блоке 12 вычисляется расчетный кинетический момент  = τ×M.
= τ×M.
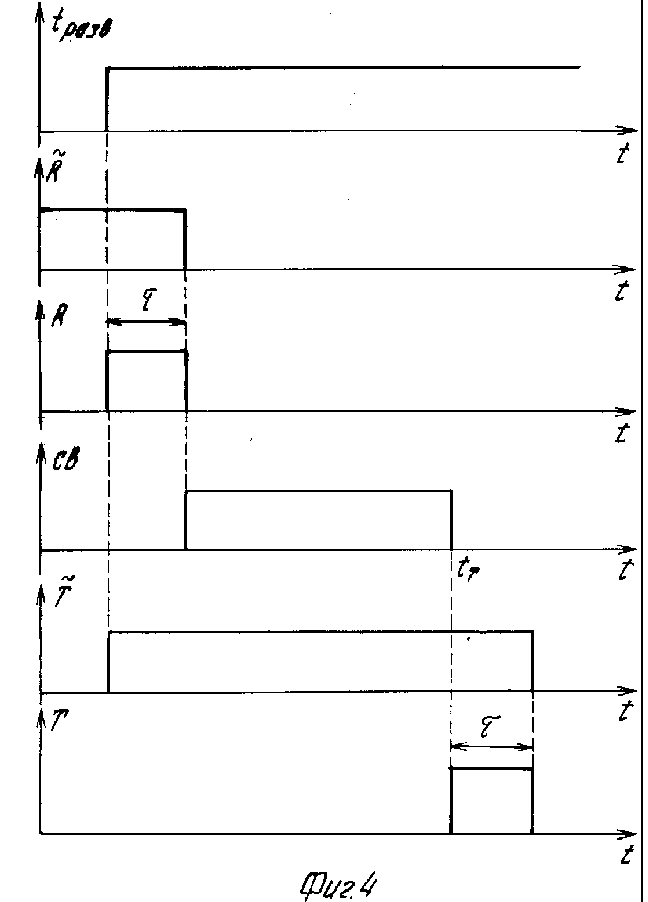
Временные диаграммы процесса разворота представлены на фиг. 4. В начальный момент времени tразв = "0";  = 0, Λ= Λн,
= 0, Λ= Λн,  = 0,
= 0,
В момент скачка tразв = "1" (поступила команда на разворот) появляется сигнал R= "1" (разгон). Управляющий момент  =
=  Блок 5 измеряет абсолютную угловую скорость
Блок 5 измеряет абсолютную угловую скорость  , вычисляется фактический кинетический момент
, вычисляется фактический кинетический момент  = { Ixωx, Iyωy, Izωz} в блоке 11 и разгон продолжается (R = "1") до тех пор, пока
= { Ixωx, Iyωy, Izωz} в блоке 11 и разгон продолжается (R = "1") до тех пор, пока  =
=  -
- 0. В момент времени, когда
0. В момент времени, когда  =
=  , R = 0 и
, R = 0 и  = 0; объект предоставлен сам себе. По истечении времени Тк - τ с начала разворота формируется сигнал на торможение Т = "1", по которому блок 29 фиксирует направление
= 0; объект предоставлен сам себе. По истечении времени Тк - τ с начала разворота формируется сигнал на торможение Т = "1", по которому блок 29 фиксирует направление  , вычисляемое в блоке 28 по выражению
, вычисляемое в блоке 28 по выражению  =
=  1/
1/ , где Λт= Λ (tт); Это направление сохраняется постоянным в инерциальном пространстве. Блок 10 определяет момент
, где Λт= Λ (tт); Это направление сохраняется постоянным в инерциальном пространстве. Блок 10 определяет момент  = m
= m . Момент управления
. Момент управления  = -
= - , который направлен против фактического кинетического момента
, который направлен против фактического кинетического момента  и действует до полной остановки объекта (
и действует до полной остановки объекта (  = 0). Когда
= 0). Когда  = 0, сигнал Т = "0" и
= 0, сигнал Т = "0" и  = 0, tразв = "0", разворот окончен. Система готова к следующему развороту.
= 0, tразв = "0", разворот окончен. Система готова к следующему развороту.
Эффективность предлагаемой системы определяется прежде всего тем, что управляющий момент действует только при разгоне и торможении. На большей части траектории разворота - участке свободного вращения - управление отсутствует, что позволяет значительно экономить расход топлива на разворот. (56) Бранец В. Н. , Черепок Н. Б. , Казначеев Ю. В. Оптимальный разворот твердого тела с одной осью симметрии. Космические исследования, 1984, т. 22, вып. 3.
Изобретение относится к космической технике и может быть использовано для управления угловым положением. Технико-экономическим эффектом является уменьшение затрат топлива на разворот динамически симметричного космического аппарата (КА) и возможность управления разворотом динамически несимметричного КА. Система управления пространственным разворотом КА осуществляют изменение ориентации КА из начального углового положения в требуемое конечное угловое положение за заданное время. В предлагаемой системе автоматически определяется такой импульс кинетического момента, сообщение которого корпусу КА и обеспечивает переход его из начального углового положения в конечное угловое положение, причем на большей части разворота моменты управления отсутствуют. Вычисление расчетного кинетического момента осуществляется контуром, образованным блоком обновления параметров разворота, блоком определения промаха разворота, блоком коррекции параметров разворота, блоком запоминания вектора разворота, блоком определения направления тормозного импульса, блоком запоминания и коммутации вектора разворота. В системе управления алгоритмически решается краевая задача: определения таких начальных угловых скоростей, чтобы из углового положения Λн в результате свободного вращения КА принял бы угловое положение Λк через заданное время Tк . Решив ее, система управления сообщает объекту вычисленные угловые скорости, а при подходе к конечному положению гасит имеющиеся угловые скорости. Преимуществом предлагаемой системы управления пространственным разворотом КА является ее экономичность. Затраты топлива на осуществление разворота являются практически минимально возможными, т. к. топливо тратится только на разгон и на торможение. Собственно разворот - участок движения по свободной траектории - является безрасходным. 4 ил.
СИСТЕМА УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ РАЗВОРОТОМ КОСМИЧЕСКОГО АППАРАТА(КА), содержащая последовательно соединенные блок задания начального и конечного положений, бесплатформенную инерциальную навигационную систему, блок формирования момента управления и блок формирования разгонного и тормозного импульсов, блок определения параметров разворота, первый и второй входы которого соединены соответственно с первым и вторым выходами блока задания начального и конечного положений, последовательно соединенные задатчик времени разворота, блок определения времени разгона, блок определения отклонения кинетического момента от расчетного, второй вход которого соединен с выходом блока формирования момента управления, блок формирования команды на свободное вращение, схему ИЛИ и схему ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которой соединен с вторым входом блока формирования разгонного и тормозного импульсов, блок формирования команды на торможение, вход которого соединен с выходом блока определения кинетического момента, а выход соединен с вторым входом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, блок формирования команды на разгон, вход которого соединен с вторым выходом блока формирования команды на свободное вращение, последовательно соединенные блок датчиков угловой скорости, выход которого соединен с вторым входом бесплатформенной инерциальной навигационной системы, и блок определения кинетического момента, выход которого соединен с третьим входом блока определения отклонения кинетического момента, блок определения вектора разворота, блок определения момента инерции вокруг поперечной оси, выход которого соединен с вторым входом блока определения времени разгона и первым входом блока определения вектора разворота, блок задания моментов инерции, первый и второй выходы которого соединены соответственно с первым и вторым входами блока определения момента инерции вокруг поперечной оси, третий выход соединен с вторыми входами блока определения вектора разворота и блока определения кинетического момента, блок определения направления разгонного импульса, вход которого соединен с первым выходом блока задания начального и конечного положений, отличающаяся тем, что в нее дополнительно введены блок обновления параметров разворота, первый вход которого соединен с выходом блока определения параметров разворота, а выход - с третьим входом блока определения вектора разворота, блок определения промаха разворота, первый и второй входы которого соединены соответственно с первым и вторым выходами блока задания начального и конечного положений, третий и четвертый входы соединены соответственно с первым и вторым выходами блока определения вектора разворота, пятый вход - с выходом задатчика времени разворота, шестой вход - с выходом блока определения момента инерции вокруг поперечной оси, седьмой, восьмой и девятый входы - соответственно с первым, вторым и третьим выходами блока задания момента инерции, блок коррекции параметров разворота, первый вход которого соединен с первым выходом блока определения промаха разворота, второй вход - с вторым выходом блока задания начального и конечного положений, третий вход - с выходом блока обновления параметров разворота, а выход - с вторым входом блока обновления параметров разворота, последовательно соединенные задатчик допустимой ошибки разворота и блок формирования команды на запоминание вектора разворота, второй вход которого соединен с вторым выходом блока определения промаха разворота, а выход - с третьим входом блока обновления параметров разворота, блок запоминания вектора разворота, первый вход которого соединен с выходом блока формирования команды на запоминание вектора разворота, второй и третий входы - соответственно с первым и вторым выходами блока определения вектора разворота, первый выход - с вторым входом блока определения направления разгонного импульса, второй выход - с третьим входом блока определения времени разгона, последовательно соединенные блок определения направления тормозного импульса, первый вход которого соединен с выходом бесплатформенной инерциальной навигационной системы, второй вход - с выходом блока определения времени разгона, третий вход - с выходом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, и блок запоминания и коммутации вектора разворота, второй вход которого соединен с выходом блока определения направления разгонного импульса, третий вход - с выходом схемы ИСКЛЮЧАЮЩЕЕ ИЛИ, четвертый вход - с выходом блока выдачи команды на разгон, а выход - с вторым входом блока формирования момента управления, выход блока выдачи команды на разгон соединен с третьим входом блока формирования разгонного и тормозного импульсов и вторым входом схемы ИЛИ, третий и четвертый входы блока определения кинетического момента соединены соответственно с первым и вторым выходами блока задания моментов инерции, второй вход блока формирования команды на свободное вращение соединен с выходом задатчика времени разворота, задатчик команды на начало разворота, выход которого соединен с вторым входом блока формирования команды на свободное вращение.
