Изобретение относится к космической технике и может быть использовано при проектировании систем управления угловым движением космических аппаратов (КА), в частности гравитационной системы ориентации КА.
Известно устройство для стабилизации углового движения КА, содержащее средство демпфирования углового движения КА по каналам крена и рыскания, выполненное в виде трехстепенного гиростабилизатора, связанного с корпусом КА через упруго-вязкий подвес. Недостатком указанного устройства является то, что канал управления по тангажу развязан с взаимосвязанными каналами крена-рыскания и для демпфирования колебаний по тангажу требуется введение специальных средств для прямого или косвенного определения угловой скорости и формирования демпфирующего воздействия. Так, например, для формирования демпфирующего сигнала используют сигнал с тахогенератора электродвигателя-маховика с линейным управлением скорости вращения. При использовании в гравитационной системе трехосной ориентации КА маховика с постоянной скоростью вращения для демпфирования угловых скоростей по каналам крена, рыскания и тангажа используется магнитный демпфер. Намагниченная сфера подобно стрелке магнитного компаса отслеживает направление вектора напряженности магнитного поля Земли, вращаясь в вязком жидком подвесе относительно корпуса КА, и энергия колебания упругой гравитационной штанги и корпуса аппарата за счет возникновения вихревых токов в материале магнитного демпфера и вязкого трения в жидкости при относительном угловом движении шара и корпуса КА переходит в тепловую и рассеивается в окружающем пространстве.
Наиболее близким к решаемой задаче является устройство для стабилизации углового движения КА с гравитационной системой ориентации, содержащее средство формирования и приложения к корпусу КА демпфирующих воздействий по каналам керна и рыскания, выполненное в виде гиродемпфера, представляющего собой маховик с постоянной скоростью вращения, связанный через упруго-вязкий однорамочный подвес с корпусом аппарата.
Недостатком известного устройства является невозможность демпфирования углового движения КА и его упругих элементов конструкции по каналу тангажа с использованием средств демпфирования по каналам керна и/или рыскания.
Целью изобретения является устранение указанных недостатков.
Цель достигается тем, что в устройстве для стабилизации углового движения космического аппарата с упругими выносными элементами, содержащем средства демпфирования угловой скорости движения аппарата по каналам крена и/или рыскания, для демпфирования колебаний по каналу тангажа средствами гашения угловых скоростей аппарата по каналам крена и/или рыскания поперечное сечение упругого выносного элемента выполнено с неравными главными моментами инерции, расположено параллельно вектору изгибающего момента, возникающего при колебательном угловом движении аппарата вокруг оси тангажа, и развернуто вокруг оси, перпендикулярной плоскости упомянутого поперечного сечения на расчетный угол, при этом расчетная величина угла между главной осью инерции поперечного сечения и строительной осью аппарата, параллельной вектору упомянутого выше изгибающего момента, больше нуля, но меньше угла между соседними главными центральными осями инерции поперечного сечения.
При стабилизации углового движения космического аппарата относительно орбитальной системы координат поперечные сечения двух или более симметрично установленных относительно центра масс аппарата упругих выносных элементов развернуты вокруг оси, перпендикулярной плоскости упомянутого поперечного сечения, на один и тот же угол и в одну и ту же сторону, если смотреть со стороны полуоси, направленной из центра масс аппарата в точку крепления выносного элемента на корпусе аппарата.
При стабилизации углового движения космического аппарата в режиме коррекции орбиты при действии линейных ускорений вдоль оси, перпендикулярной направлению оси из центра масс аппарата в точку крепления выносного элемента, последние развернуты вокруг оси, перпендикулярной плоскости поперечного сечения на один и тот же угол, но в противоположные стороны, если смотреть со стороны полуоси, направленной из центра масс аппарата в точку крепления выносного элемента на корпусе аппарата.
С целью обеспечения автоматической выставки и ориентации строительной оси тангажа КА с гравитационной штангой по вектору орбитальной угловой скорости и одновременного демпфирования угловых скоростей по каналам крена и рыскания в нем средство демпфирования угловой скорости движения аппарата по каналам крена и/или рыскания выполнено в виде маховика с ненулевой угловой скоростью вращения, связанного через одноосный упруго-вязкий рамочный подвес с корпусом аппарата, ось вращения маховика в неотклоненном положении установлена по строительной оси тангажа, причем ось вращения рамочного подвеса совмещена с плоскостью, образованной строительными осями крена и рыскания и установлена под углом 45о к строительным осям крена и рыскания.
Разворот упругого выносного элемента целесообразно выполнять до достижения максимального значения перекачки энергии углового движения упругого выносного элемента из канала тангажа в каналы крена и/или рыскания УВЭ. Например, для прямоугольного поперечного сечения указанное условие выполняется в зависимости от соотношения размеров сторон сечения при таком угле между строительной осью тангажа аппарата и главной осью инерции поперечного сечения, при котором колебания КА вокруг оси тангажа вызывают колебание штанги в плоскости, расположенной под углом от 20 до 60о к тангажной плоскости аппарата (плоскость тангажа перпендикулярна строительной оси тангажа КА). При этом ось тангажа будет находиться между двумя соседними главными осями поперечного сечения упомянутого УВЭ.
Причинно-следственная связь между совокупностью вышеуказанных существенных признаков и достигаемым результатом заключается в том, что после вышеупомянутого разворота УВЭ вокруг оси, перпендикулярной поперечному сечению, колебания КА вокруг оси тангажа вызывают косой изгиб штанги УВЭ. Поэтому плоскость упругих колебаний имеет ненулевую проекцию на плоскость крена аппарата и энергия колебаний КА и УВЭ из канала тангажа перекачивается и демпфируется средствами гашения угловых скоростей каналов крена и/или рыскания.
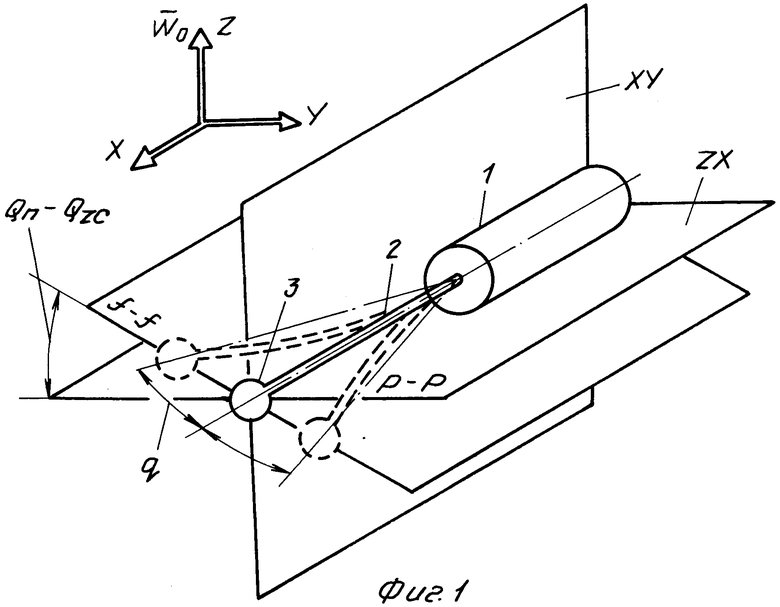
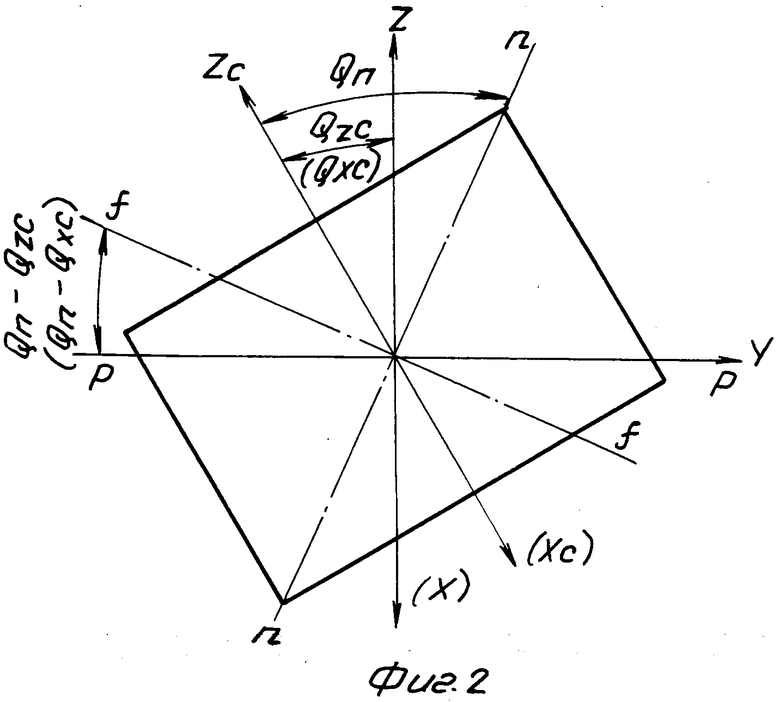
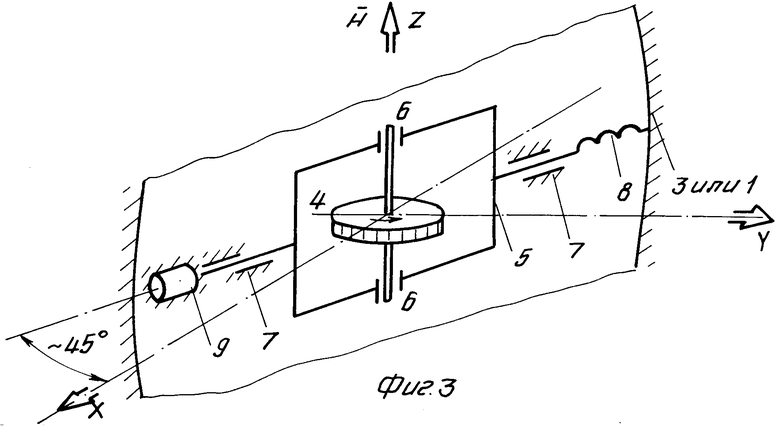
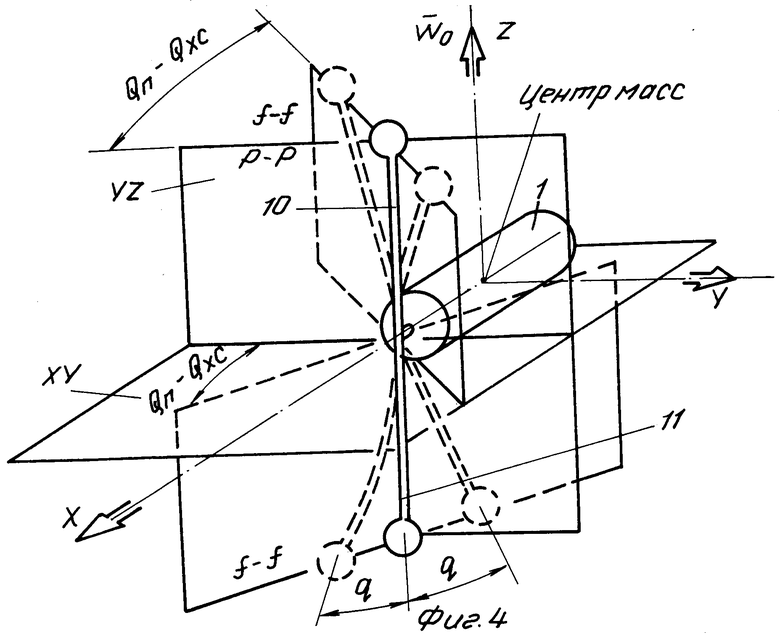
На фиг. 1 приведена схема компоновки КА с гравитационной штангой; на фиг. 2 - ориентация поперечного сечения упругого выносного элемента; на фиг. 3 - схема компоновки гиродемпфера; на фиг. 4 - схема компоновки КА с двумя симметрично расположенными упругими выносными элементами;
На чертежах приняты следующие обозначения:
1 - корпус КА;
2, 10 11 - упругие выносные элементы (гравитационная штанга, панели солнечных батарей и т.п.);
3 - корпус гиродемпфера;
4 - маховик
5 - рамка;
6 - подшипники оси вращения маховика 4;
7 - подшипники оси вращения рамки 5;
8 - упругая связь (пружина) между рамкой 5 маховика 4 и корпусом 3;
9 - демпфирующая связь между рамкой 5 маховика 4 и корпусом гиродемпфера 3;
Х - строительная ось КА по каналу рыскания;
У - строительная ось КА по каналу крена;
Z - строительная ось КА по каналу тангажа,
QZc(QXc) - первая главная центральная ось инерции поперечного сечения УВЭ,
QYс - вторая главная центральная ось инерции поперечного сечения УВЭ,
ХУ - плоскость угловых колебаний КА по каналу тангажа;
ZX - плоскость угловых колебаний КА по каналу крена;
ZY - плоскость угловых колебаний КА по каналу курса;
f-f - плоскость изгиба УВЭ;
р-р - плоскость действия изгибающего момента
n-n - нейтральная ось поперечного сечения, перпендикулярная плоскости изгиба f-f УВЭ при приложении изгибающего момента (на оси n-n нормальные напряжения в поперечном сечении УВЭ при его изгибе равны нулю).
g - угловая координата упругих колебаний УВЭ 2, 10, 11;
Qzc(Qxc) - угол разворота главной оси инерции поперечного сечения QZc(QXc) вокруг оси Х (Z) относительно оси Z(X) КА;
Qn - угол между осью Qzc(QXc) и нейтральной линией n-n;
Qn-Qzc (Qn-Qxc) - угол отклонения плоскости f-f колебаний УВЭ при косом изгибе от плоскости р-р; - вектор орбитальной угловой скорости КА;
- вектор орбитальной угловой скорости КА; - вектор кинетического момента маховика гиродемпфера.
- вектор кинетического момента маховика гиродемпфера.
К корпусу 1 КА крепится штанга 2 с корпусом 3 гиродемпфера. Ось Ос поперечного сечения (фиг. 2) штанги повернута на угол Ос.
После отделения от ракеты-носителя для выполнения начальной ориентации включается электромагнитная катушка (не показана) и КА (фиг. 1) подобно магнитной стрелке ориентируется осью Х, совпадающей с вектором напряженности магнитного поля катушки, по вектору напряженности магнитного поля Земли (МПЗ). В районе одного из магнитных полюсов Земли, где вектор МПЗ близок к местной вертикали Земли, осуществляется выдвижение гравитационной штанги 2, чем достигается однозначность ориентации строительной оси рыскания КА X по радиусу-вектору центра масс аппарата, то есть в направлении от Земли. Затем включается раскрутка маховика 4 корпуса 3 гиродемпфера, установленного в рамке 5 (фиг. 3) через подшипники 6. При этом управляющий момент раскрутки маховика ограничивается величиной, не превосходящей гравитационный момент, для исключения возможности разориентации (переворота) КА. Изменение кинетического момента системы КА-гиродемпфер компенсируется гравитационным моментом. Возможны и другие варианты управления для выполнения начальной ориентации.
После раскрутки маховика ось его вращения (кинетический момент  , совпадающий с осью тангажа Z) в общем случае не совпадает с вектором орбитальной угловой скорости
, совпадающий с осью тангажа Z) в общем случае не совпадает с вектором орбитальной угловой скорости  . В силу гироскопического эффекта ось Z КА стремится оставаться неподвижной в инерциальном пространстве и в процессе орбитального движения ось Х аппарата отклоняется от местной вертикали. Возникающий при этом гравитационный момент вызывает прецессионное угловое движение КА вокруг оси Х до совмещения оси тангажа с вектором угловой орбитальной скорости. Угловые скорости по каналам крена и pыскания вызывают прецессионное отклонение рамки 5 маховика (ось подшипников 7 поворота рамки устанавливается под углом ≈ 45о относительно осей Х и У в плоскости ХУ, благодаря чему обеспечивается завязка каналов крена и рыскания), в результате чего гасятся с помощью упруго-вязкой связи (пружина 8 и демпфер 9 на оси вращения рамки) между маховиком и корпусом 1 КА.
. В силу гироскопического эффекта ось Z КА стремится оставаться неподвижной в инерциальном пространстве и в процессе орбитального движения ось Х аппарата отклоняется от местной вертикали. Возникающий при этом гравитационный момент вызывает прецессионное угловое движение КА вокруг оси Х до совмещения оси тангажа с вектором угловой орбитальной скорости. Угловые скорости по каналам крена и pыскания вызывают прецессионное отклонение рамки 5 маховика (ось подшипников 7 поворота рамки устанавливается под углом ≈ 45о относительно осей Х и У в плоскости ХУ, благодаря чему обеспечивается завязка каналов крена и рыскания), в результате чего гасятся с помощью упруго-вязкой связи (пружина 8 и демпфер 9 на оси вращения рамки) между маховиком и корпусом 1 КА.
После совмещения оси тангажа с вектором угловой орбитальной скорости гравитационный момент вызывает колебательное движение КА вокруг нормали к плоскости ХУ орбиты, т.е. по каналу тангажа вокруг оси Z. При этом инерционные силы, прикладываемые к штанге 2, вызывают изгибающий момент, вектор которого направлен по оси Z, который в свою очередь приводит к упругим деформациям штанги 2.
Согласно изобретению предлагается УВЭ (штангу 2) выполнить с неравной (анизотропной) жесткостью в различных направлениях, например, за счет конструктивного выбора поперечного сечения в виде эллипса или прямоугольника (фиг. 2, обозначение осей без скобок). УВЭ устанавливается на КА или ориентируется путем поворота электроприводом так, чтобы поперечное сечение было параллельно вектору изгибающего момента, возникающего при колебательном угловом движении аппарата вокруг оси тангажа (в данном примере вектор изгибающего момента, прикладываемый к штанге 2, совпадает с осью тангажа Z), а главные оси инерции поперечного сечения Qzс и QYc поворачивают вокруг оси Х (также предварительно или в процессе эксплуатации с помощью электропривода) на расчетный угол Qzc так, чтобы главные оси инерции находились под ненулевым углом к оси аппарата, совпадающей с вектором изгибающего момента (то есть, к оси тангажа Z). Величина угла Ос выбирается, например, из условия обеспечения максимума перекачки энергии упругих колебаний из канала тангажа в канал крена и/или рыскания за счет косого изгиба УВЭ. В частности, для прямоугольной формы поперечного сечения угол Ос можно вычислить из соотношения:
tg Qzc=(Iус/Izc)tgQn,
где Iус, Izc - главные моменты инерции поперечного сечения;
Qn - требуемое угловое положение нейтральной линии n-n, рассчитываемое из условия максимума перекачки энергии колебаний из канала тангажа в канал крена и/или рыскания, например, рассчитываемое исходя из равенства угла (Qn-Qzc) величине в пределах от 20 до 60о.
Изменение угловой скорости КА по каналу тангажа, вызываемое гравитационным моментом, приводит к упругим деформациям штанги 2. Благодаря упомянутому развороту осей OZc и Oyc поперечного сечения относительно оси тангажа КА Z возмущающий момент в плоскости орбиты ХУ вызывает косой изгиб штанги 2 и она совершает гармонические упругие колебания с амплитудой угла g и ненулевой проекцией на плоскость Х. Плоскость колебаний штанги f-f составляет со следом плоскости р-р действия изгибающего момента (в нашем примере р-р ориентируется в плоскости орбиты ХУ) некоторый расчетный угол, равный (Qn-Qzc). Причем нейтральная ось n-n отклоняется от оси Zc на угол Qn в ту же сторону, в которую след плоскости р-р отклонен от оси Ус на угол Qzc. Таким образом, энергия колебаний аппарата и УВЭ в плоскости орбиты (по каналу тангажа) перекачивается в канал крена и гасится гиродемпфером или другим средством демпфирования. Путем выбора параметров гиродемпфера, жесткостных и инерционных и т.п. характеристик КА собственная частота колебаний по каналу крена и рыскания может быть обеспечена на порядок ниже собственной частоты системы корпус КА-УВЭ-гиродемпфер по каналу тангажа и практически исключена перекачка колебаний из каналов крена и/или рыскания в тангажный канал.
На фиг. 4 приведена схема компоновки КА с двумя симметрично расположенными относительно оси Х КА УВЭ, которыми могут быть панели солнечных батарей (СБ). В данном примере штанги СБ расположены параллельно оси тангажа и смещены вдоль оси рыскания Х от центра масс КА. При колебательном движении КА к штанге 10 (ось (+Z) и штанге 11 (ось (-Z) прикладываются инерционные силы, вызывающие изгибающий момент, вектор которого направлен по оси Х. Штанги 10 и 11 совершают гармонические колебания в плоскости, параллельной строительной плоскости КА У, периодически образуя форму, похожую на латинскую букву U (U-образная форма колебаний).
Согласно изобретению предлагается УВЭ 10 и 11 выполнять с неравной (анизотропной) жесткостью в различных направлениях, например, за счет конструктивного выбора поперечного сечения в виде эллипса или прямоугольника (фиг. 2, для рассматриваемого примера обозначение осей заключено в скобки). УВЭ (панели СБ) устанавливаются на КА или ориентируются путем поворота электроприводом так, чтобы поперечное сечение было параллельно вектору изгибающего момента, возникающего при колебательном движении аппарата вокруг оси тангажа (в данном примере вектор изгибающего момента, прикладываемый к штангам 10 и 11, совпадает с осью рыскания Х), а главные оси инерции поперечного сечения ОХс и ОУс поворачивают вокруг оси Z (предварительно или в процессе эксплуатации с помощью электропривода) на расчетный угол Qyc так, чтобы главные оси инерции находились под ненулевым углом к оси аппарата, совпадающей с вектором изгибающего момента (то есть к оси рыскания Х). Величина угла Qyc выбирается аналогично, как угол Qzc в рассмотренном примере компоновки КА на фиг. 1. При стабилизации КА относительно орбитальной системы координат симметрично установленные УВЭ 10 и 11 необходимо развернуть на один и тот же угол и в одну и ту же сторону, если смотреть с конца каждого из УВЭ 10 и 11. Тогда при изгибе штанг 10 и 11 в направлении оси +Y (-Y) (U-образная форма колебаний в плоскости Y) возникает отклонение штанги 10 вследствие косого изгиба в направлении оси -Х (+Х) и штанги 11 в направлении оси +Х (-Х) (S-образные колебания в плоскости ZX). Таким образом, и в указанном примере энергия колебаний КА по каналу тангажа перекачивается через упругие колебания УВЭ 10 и 11 в канал крена (ось Y), где рассеивается средством демпфирования, например гиродемпфером.
В варианте коррекции орбиты, когда работа реактивных двигателей вызывает линейные ускорения КА, с целью исключения угловых колебаний корпуса КА вокруг линии действия тяги из-за упругих колебаний симметрично установленных УВЭ, целесообразно повернуть каждый из двух упомянутых УВЭ на один и тот же угол, но в разные стороны, если смотреть с конца каждого из УВЭ 10 и 11 вокруг оси, перпендикулярной поперечному сечению. Тогда одноименные главные оси инерции поперечных сечений УВЭ 10 и 11 будут расположены параллельно друг другу и под расчетным углом Qxc относительно оси рыскания Х и линейное ускорение КА вдоль оси У вызывает U-образные колебания упругих штанг, вызывающие линейные колебания корпуса КА в направлении, перпендикулярном линии действия тяги двигателей и параллельном плоскости поперечного сечения УВЭ.
Таким образом, введение новых элементов конструкции, нового их расположения относительно корпуса КА и формы их выполнения позволяет обеспечить кинематическую завязку каналов тангажа, крена и рыскания и гашение колебательного углового движения аппарата и его УВЭ по каналу тангажа средствами демпфирования колебаний в каналах крена и/или рыскания.
Использование в космической технике при проектировании систем управления угловым движением космических аппаратов (КА), в частности гравитационной системы ориентации КА, систем ориентации КА с упругими панелями солнечных батарей и т.п. Устройство содержит упругие выносные элементы, средство демпфирования угловой скорости движения аппарата по каналам крена и/или рыскания. Поперечное сечение упругого выносного элемента выполнено с неравными главными моментами инерции, расположено параллельно вектору изгибающего момента, возникающего при колебательном угловом движении аппарата вокруг оси тангажа, и развернуто вокруг оси, перпендикулярной плоскости поперечного сечения на расчетный угол, при этом расчетная величина угла между главной осью инерции поперечного сечения и строительной осью аппарата, параллельной вектору изгибающего момента, больше нуля, но меньше угла между соседними главными центральными осями инерции поперечного сечения. В процессе поддержания орбитальной ориентации КА в нем поперечные сечения двух или более симметрично установленных относительно центра масс аппарата упругих выносных элементов развернуты вокруг оси, перпендикулярной плоскости поперечного сечения, на один и тот же угол и в одну и ту же сторону вокруг оси, направленной из центра масс аппарата в точку крепления выносного элемента на корпусе аппарата. В процессе поддержания ориентации при приложении линейного управляющего воздействия к корпусу КА, например при коррекции орбиты, в нем поперечные сечения двух или более симметрично установленных относительно центра масс аппарата упругих выносных элементов развернуты вокруг оси, перпендикулярной плоскости поперечного сечения на один и тот же угол и в противоположные стороны относительно оси, направленной из центра масс аппарата в точку крепления выносного элемента на корпусе аппарата. Средство демпфирования угловой скорости движения аппарата по каналам крена и/или рыскания выполнено в виде маховика с ненулевой угловой скоростью вращения, связанного через одноосный упруговязкий рамочный подвес с корпусом аппарата, ось вращения маховика в неотклоненном положении установлена по строительной оси тангажа, причем ось вращения рамочного подвеса совмещена с плоскостью, образованной строительными осями крена и рыскания и установлена под углом 45° к строительным осям крена и рыскания. 3 з.п.ф-лы, 4 ил.
| В.А.Сарычев | |||
| Вопросы ориентации искусственных спутников | |||
| Исследование космического пространства | |||
| Итоги науки и техники, т.11, М., ВИНИТИ, 1978. |

