Изобретение относится к шахтному подъему, конкретно к управлению торможением шахтных подъемных машин.
Известен способ управления процессом торможения подъемников и устройство для его осуществления, имеющие трехступенчатый диапазон изменения скорости, при этом на второй ступени торможения величина скорости подъемника постоянная, следовательно, замедление равно нулю. Однако этот способ и устройство позволяют только сократить пути, проходимые подъемными сосудами с замедленной скоростью, но не позволяют получить необходимую зависимость изменения тормозного момента и безопасного замедления груженого подъемного сосуда из условия ненабегания сосуда на канат [1]
Этот же недостаток присущ и другому известному способу управления рабочим торможением шахтной подъемной машины, по которому торможение производят в несколько ступеней путем изменения тормозного момента в соответствии с заданной программой [2]
Известен способ контроля нестабильности параметров тормозной системы подъемной машины, включающий задание величины тормозного усилия, определение действительного значения тормозного усилия, сравнения его с заданным значением тормозного усилия и выработку тормозного воздействия на привод рабочего тормоза подъемной машины по их разности. Однако определение действительного значения тормозного усилия производится на валу двигателя или барабана подъемной машины, который отделен от подъемного сосуда тяговым канатом, вносящим погрешности в работу тормозной системы, что снижает точность и безопасность работы шахтной подъемной установки [3]
Цель изобретения повышение точности и безопасности работы шахтной подъемной установки.
Эта цель достигается тем, что измеряют полезную массу груза в груженом сосуде и рассчитывают величину приведенной массы движущихся частей подъемной установки, измеряют замедление подъемного сосуда, а действительное тормозное усилие определяют путем перемножения величины приведенной массы движущихся частей подъемной установки и замедления подъемного сосуда.
Сущность изобретения заключается в следующем.
Применяемые в настоящее время системы торможения шахтных подъемных машин относятся к так называемым системам постоянного тормозного воздействия (М.Н. Василевский и др. "Автоматизация шахтных подъемных машин с асинхронным приводом, М. Госгортехиздат", 1966), в которых торможение осуществляется приложением постоянного тормозного усилия на барабан подъемной машины, для реализации которого необходимо знать тормозной путь подъемного сосуда. В связи с невозможностью добиться абсолютно точной загрузки подъемного сосуда, следствием чего является вынужденное изменение его тормозного пути, в схему управления рабочего тормоза вводят датчик начала замедления, например, типа ДНЗ-1 (Л.И.Толпежников. Автоматизация подземных горных работ, М. Недра, 1976 с. 218-219). Все эти системы оказались необходимы потому, что отсутствовали средства для измерения ускорения (замедления) подъемного сосуда и приведенной массы движущихся частей подъемной установки из-за невозможности измерения полезной массы груза в груженом сосуде при движении подъемной машины.
Основное динамическое уравнение подъемной установки уравнение М.М.Федорова (В.В.Алексеев. Стационарные машины. М. Недра, 1989 с.385, ф-ла (5.52)) показывает, что тормозная сила, действующая на подъемную установку, определяется произведением изменяющихся величин замедления подъемных сосудов и приведенной массы всех движущихся частей подъемной установки. Последняя, по ф-ле (5.53), изменяется в каждом цикле подъема в зависимости от массы полезного груза. Следовательно, чтобы затормозить подъемную машину в строгом соответствии с расчетной диаграммой усилий, необходимо в каждый момент времени знать приведенную массу движущихся частей подъемной установки и действительное замедление подъемного сосуда.
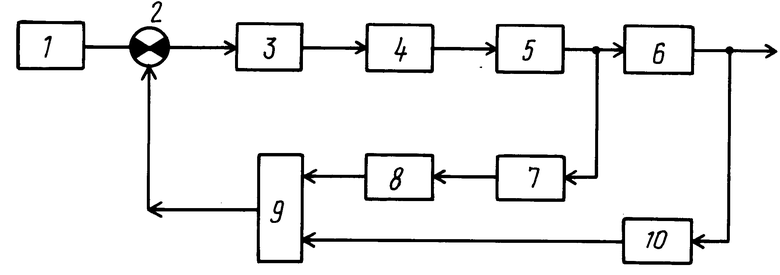
На чертеже приведена структурная схема устройства для реализации предлагаемого способа.
Напряжение задания тормозного усилия с командоаппарата 1 поступает на узел сравнения 2, в котором оно сравнивается с напряжением, пропорциональным необходимому тормозному усилию. Сигнал рассогласования их, так называемая ошибка регулирования, поступает на регулятор 3 давления, который управляет приводом рабочего тормоза 4 барабана подъемной машины 5, соединенной канатом с подъемным сосудом 6.
Сигнал, пропорциональный полезной массе груза в подъемном сосуде, с помощью датчика 7 полезной массы груза поступает на пересчетное устройство 8 приведенной массы движущихся частей подъемной установки, выход которого служит первым входом блока умножения 9. Сигнал, пропорциональный замедлению сосуда, с помощью датчика 10 (акселерометра Огнева) подается на второй вход блока умножения 9, в котором производится выработка сигнала, пропорционального произведению действительной приведенной массы движущихся частей подъемной установки и действительного замедления подъемного сосуда. При отклонении действительных значений приведенной массы движущихся частей подъемной установки и (или) замедления подъемного сосуда от расчетных на выходе блока умножения 9 появляется сигнал, отличающийся от заданного командоаппаратом 1. Узел 2, сравнив их, переключает регулятор 3 давления в такое положение, чтобы привод рабочего тормоза 4 воздействовал на барабан подъемной машины 5, а через канат на подъемный сосуд 6 в сторону устранения рассогласования заданного и действительного тормозных усилий.
Таким образом, предлагаемый способ управления, повышая точность и безопасность работы подъемной установки, позволяет отказаться от систем с постоянным тормозным воздействием со всеми присущими им недостатками и перейти к принципиально новым тормозным системам с постоянным замедлением, что безусловно повысит точность и безопасность работы шахтных подъемных установок.
Назначение: изобретение относится к шахтному подъему и предназначено для управления рабочим торможением шахтной подъемной машины. Сущность изобретения: цель изобретения повышение безопасности работы шахтной подъемной установки. Измеряют замедление подъемного сосуда и полезную массу груза в груженом сосуде. Производят расчет приведенной массы движущихся частей подъемной установки и перемножают приведенную массу и замедление. Произведение сравнивают с заданным тормозным усилием и по их разности вырабатывают тормозное воздействие на подъемную машину. 1 ил.
СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ТОРМОЖЕНИЕМ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНЫ, включающий задание величины тормозного усилия, определение действительного значения тормозного усилия, сравнение его с заданным значением тормозного усилия и выработку тормозного воздействия на привод рабочего тормоза подъемной машины по их разности, отличающийся тем, что измеряют полезную массу груза в груженом сосуде и рассчитывают величину приведенной массы движущихся частей подъемной машины, измеряют замедление подъемного сосуда, а действительное тормозное усилие определяют путем перемножения величины приведенной массы движущихся частей подъемной машины и замедления подъемного сосуда.
| Способ контроля нестабильности параметров тормозной системы подъемной машины | 1979 |
|
SU770983A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
