Изобретение относится к землеройно-транспортным машинам, а именно к автогрейдерам.
Известен грейдер, прицепной к двухосному тягачу, включающий отвал, связанный поворотным кругом с тяговой рамой, имеющей шаровую опору, закрепленную на хребтовой раме, задний ходовой механизм прицепного грейдера, выполненный в виде двух балансирных тележек [1] Недостатком грейдера является трудное управление прицепной машиной, находящейся сзади. Такие машины имеют плохую маневренность, более низкую производительность, чем современные автогрейдеры, из-за использования второго оператора, находящегося на прицепном агрегате.
Известен автогрейдер, включающий двухосный тягач, отвал, связанный поворотным кругом с тяговой рамой, имеющей шарнир, закрепленный на хребтовой раме, которая одним концом впереди по ходу движения при копании грунта опирается на поперечную балку и колеса, а другим шарнирно связана с рамой двухосного тягача [2] Недостатком такого автогрейдера на двухосном тягаче является плохая маневренность из-за неуправляемости хребтовой рамы в плане. Как следствие это приводит к снижению производительности и других технических показателей. Техническое решение имеет также сложную конструкцию.
Целью изобретения является повышение маневренности автогрейдера на двухосном тягаче.
Поставленная цель достигается тем, что в автогрейдере на двухосном тягаче, включающем двухосный тягач, отвал, связанный поворотным кругом с тяговой рамой, имеющей шаровой шарнир, закрепленный на хребтовой раме, которая одним концом шарнирно соединена с рамой двухосного тягача, другим с поперечной балкой, опирающейся на колеса, гидроцилиндры управления, введены следующие дополнительные элементы, соединение хребтовой рамы с рамой двухосного тягача выполнено управляемым седельно-сцепным устройством, состоящим из вертикального и поперечного цилиндрических шарниров, при этом гидроцилиндры управления хребтовой рамой одним концом закреплены на хребтовой раме, другим на седельно-сцепном устройстве.
Новыми существенными признаками изобретения являются соединение хребтовой рамы автогрейдера с двухосным тягачом при помощи управляемого седельно-сцепного устройства с двумя цилиндрическими шарнирами: вертикальным и поперечным, а также использование гидроцилиндров управления хребтовой рамы, которые одним концом закреплены на хребтовой раме, другим на седельно-сцепном устройстве.
Указанные признаки являются новыми и дают новый полезный эффект повышения маневренности, производительности и упрощение конструкции.
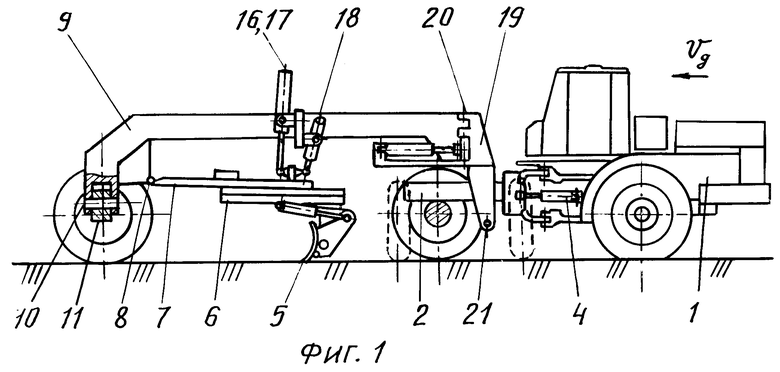
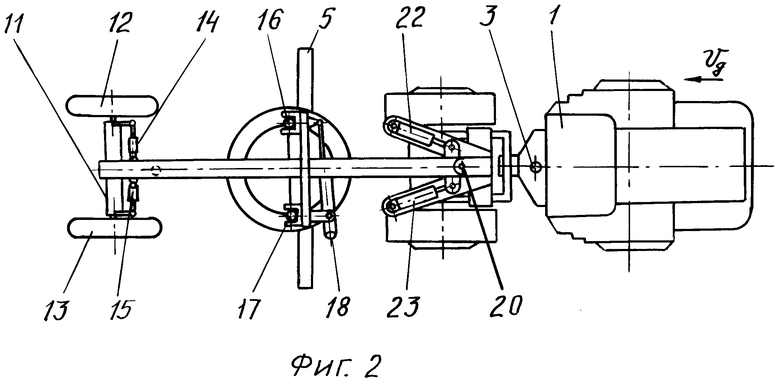
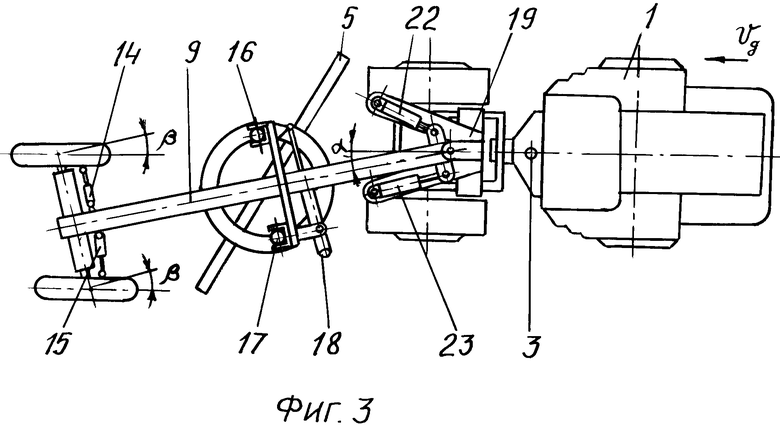
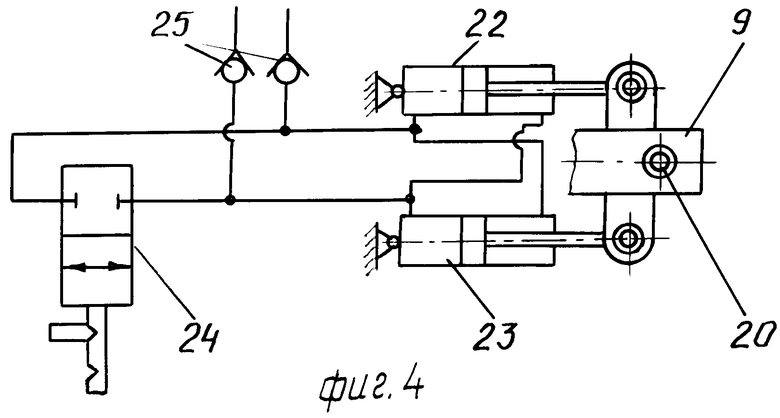
На фиг. 1 изображен вид автогрейдера сбоку; на фиг. 2 вид сверху при отсутствии угла отклонения хребтовой рамы относительно оси тягача; на фиг. 3 вид сверху при повернутой раме относительно продольной оси тягача; на фиг. 4 приведена безнасосная гидросистема гидроцилиндров управления хребтовой рамы.
Автогрейдер включает двухосный тягач, состоящий из моторной рамы 1, передней рамы тягача 2, соединенных вертикальным шарниром 3, гидроцилиндры 4 рулевого управления тягача, соединенные своими концами шарнирно с моторной рамой и передней рамой тягача, отвал 5, связанный с поворотным кругом 6 тяговой рамой 7, подсоединенной шаровой опорой 8 к хребтовой раме 9, которая впереди продольным шарниром 10 соединена с поперечной балкой 11, опирающейся на передние колеса 12, 13, гидроцилиндры 14, 15 рулевого управления закреплены на поперечной балке и связаны с рычагами управления колес 12, 13, гидроцилиндры 16, 17 вертикального перемещения тяговой рамы 7 и гидроцилиндр 18 выноса закреплены на хребтовой раме 9 и соединены шарнирно с тяговой рамой, хребтовая рама 9 вторым концом связана с передней рамой тягача 2 при помощи седельно-сцепного устройства 19, которое вертикальным шарниром 20 соединено с хребтовой рамой 9 и поперечным шарниром 21 с передней рамой 2 тягача, гидроцилиндры 22, 23 управления хребтовой рамой закреплены на кронштейнах сидельно-сцепного устройства 19 и своими штоками соединены с хребтовой рамой 9.
На фиг. 4 безнасосная гидросистема гидроцилиндров управления хребтовой рамы 22, 23 содержит распределитель 24, клапаны подпитки 25, связанные гидролиниями с гидросистемой тягача.
Рассмотрим работу автогрейдера в нескольких режимах копания грунта и транспортном режиме.
Режим копания при соосном положении хребтовой рамы относительно продольной оси тягача (фиг. 2) совершается при установке золотника 24 в запертое положение (фиг. 4), в котором гидроцилиндры 22, 23 жестко фиксируют хребтовую раму относительно передней рамы 2 тягача, одновременно гидроцилиндры 4 рулевого управления тягача устанавливаются в свободное положение (по схеме аналогичной на фиг. 4). Отвал 5 для копания грунта устанавливается в заданное положение гидроцилиндрами 16, 17, 18. При поступательном движении автогрейдера в направлении вектора Uд происходит копание грунта. Направление заданного курса движения обеспечивается рулевым управлением колес 12, 13 при помощи гидроцилиндров 14, 15, при этом задняя ось тягача 1 (с моторной рамой) работает как толкач, управлять которым не требуется. Боковая сила, возникающая на отвале 5, воспринимается передними колесами 12, 13 и колесами передней рамы 2 тягача.
Режим копания с боковым выносом хребтовой рамы 9 задается установкой угла α хребтовой рамы относительно оси тягача. Для установки заданного угла α золотник распределителя 24 переводится в положение, противоположное показанному на фиг. 4, при котором все полости гидроцилиндров 22, 23 соединены между собой, и поршни этих гидроцилиндров могут свободно перемещаться в цилиндрах.
Поворот передней рамы 2 тягача на угол α производится гидроцилиндрами 4 рулевого управления.
При изменении угла α рабочая жидкость свободно перетекает из полостей гидроцилиндра 22 в полости гидроцилиндра 23 (фиг. 4). После установки угла α распределитель 24 переключается в запертое положение и одновременно рулевое управление тягача, т.е. его гидроцилиндры 4 переводятся в свободное положение. После установки отвала 5 в положение копания колеса 12, 13 устанавливаются под углом β к оси хребтовой рамы.
При поступательном движении происходит процесс копания. Установившийся режим движения автогрейдера по заданному курсу происходит при угле α β, установленном гидроцилиндрами 14, 15 рулевого управления колес 12, 13.
Таким образом рассмотренные процессы копания грунта функционально не отличаются от режимов копания обычных автогрейдеров после выполнения соответствующих операций переключения гидроцилиндров 22, 23 хребтовой рамы из свободного режима в запертое положение, и перевода гидроцилиндров 4 рулевого управления тягача в свободный режим или в рабочее положение.
Транспортные перемещения автогрейдера можно осуществлять разными способами. В рассмотренных режимах копания, в обоих случаях, при поднятом отвале 5 можно выполнять транспортный режим, осуществляя управление колес 12, 13, при этом хребтовая рама 9 находится в зафиксированном положении относительно передней рамы. Радиус поворота автогрейдера в этом случае зависит от углов α и β установки хребтовой рамы и передних колес.
Возможен второй способ транспортного перемещения автогрейдера, при котором передние колеса 12, 13 гидроцилиндрами 14, 15 фиксируются в положение, параллельное оси хребтовой рамы, когда угол β0, гидроцилиндры 22, 23 переводятся в свободный режим, а рулевое управление тягача в рабочий режим. Транспортный режим, а рулевое управление тягача в рабочий режим. Транспортный режим совершается при движении тягача в направлении, противоположном вектору Vд (см. фиг. 1, 2, 3), при этом хребтовая рама с задними колесами перемещается как прицеп в свободном режиме. Для получения минимальных радиусов разворота возможна установка хребтовой рамы под углом α90o к оси передней рамы (фиг. 1 пунктирное положение колес).
Описанный транспортный режим не отличается от режима работы тягача с прицепным орудием.
Таким образом, предлагаемое изобретение позволяет повысить маневренность при копании грунта и транспортном режиме, производительность автогрейдера повышается в 2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОГРЕЙДЕР | 1992 |
|
RU2019636C1 |
| АВТОГРЕЙДЕР | 1992 |
|
RU2046887C1 |
| ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА ДЛЯ АВТОГРЕЙДЕРОВ | 1993 |
|
RU2061607C1 |
| Автогрейдер | 1989 |
|
SU1701837A1 |
| МЕХАНИЗМ НАТЯЖЕНИЯ ГУСЕНИЦЫ МАЛОГАБАРИТНОЙ УНИВЕРСАЛЬНОЙ МАШИНЫ | 1992 |
|
RU2032576C1 |
| АВТОГРЕЙДЕР | 1993 |
|
RU2034116C1 |
| Рабочее оборудование автогрейдера | 1991 |
|
SU1801163A3 |
| АСФАЛЬТОУКЛАДЧИК | 1991 |
|
RU2005836C1 |
| ТРЕХОСНЫЙ АВТОГРЕЙДЕР | 2000 |
|
RU2200799C2 |
| АВТОГРЕЙДЕР | 1993 |
|
RU2036278C1 |
Использование: в землеройных транспортных машинах, а именно в автогрейдерах. Сущность изобретения: автогрейдер на двухосном тягаче содержит двухосный тягач, отвал, соединенный с тяговой рамой, имеющей шаровой шарнир, закрепленный на хребтовой раме, которая одним концом соединена шарнирно с рамой двухосного тягача, другим с поперечной балкой, опирающейся на колеса, и гидроцилиндр управления, который одним концом закреплен на хребтовой раме. Соединение хребтовой рамы с рамой двухосного тягача выполнено в виде управляемого сидельно сцепного устройства, состоящего из вертикального и поперечного цилиндрических шарниров. Автогрейдер имеет дополнительный гидроцилиндр управления хребтовой рамой, один конец которого закреплен на хребтовой раме, другие концы закреплены на седельно-сцепном устройстве. 4 ил.
АВТОГРЕЙДЕР НА ДВУХОСНОМ ТЯГАЧЕ, включающий двухосный тягач, отвал, соединенный с тяговой рамой, имеющей шаровой шарнир, закрепленный на хребтовой раме, которая одним концом шарнирно соединена с рамой двухосного тягача, другим с поперечной балкой, опирающейся на колеса, и гидроцилиндр управления хребтовой рамой, который одним концом закреплен на хребтовой раме, отличающийся тем, что соединение хребтовой рамы с рамой двухосного тягача выполнено в виде управляемого седельно-сцепного устройства, состоящего из вертикального и поперечного цилиндрических шарниров, при этом автогрейдер снабжен дополнительным гидроцилиндром управления хребтовой рамой, один конец которого закреплен на хребтовой раме, а другие концы гидроцилиндров на седельно-сцепном устройстве.
| Патент США N 4071090, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
