Изобретение относится к землеройно-транспортным машинам, а именно к автогрейдерам.
Известен автогрейдер, включающий двухосный тягач, отвал, связанный поворотным кругом с тяговой рамой, имеющей шарнир, закрепленный на хребтовой раме, которая одним концом впереди по ходу движения при копании грунта опирается на поперечную балку с колесами, а другим шарнирно связана с рамой двухосного тягача. Недостатком такой конструкции автогрейдера является низкая планирующая способность, обусловленная одноосной конструкцией переднего ходового механизма, из-за которого неровности опорной поверхности без изменения передаются хребтовой раме и отвалу, вызывая его соответствующие вертикальные перемещения, ухудшающие качество планировочных работ. Эта конструкция автогрейдера обладает, кроме того, плохой маневренностью при транспортных операциях из-за неуправляемой хребтовой рамы. Указанные недостатки автогрейдера приводят к снижению производительности и надежности.
Наиболее близким по технической сущности к изобретению является автогрейдер, включающий отвал, связанный поворотным кругом с тяговой рамой, имеющей шаровой шарнир, закрепленный на хребтовой раме, снабженной передним и задним седельно-сцепными устройствами, которые опираются соответственно на передний и задний ходовые механизмы. Недостатком данного изобретения является выполнение заднего ходового механизма в виде одноосного тягача. При переезде неровностей опорной поверхности колесами заднего одноосного тягача вертикальные перемещения передаются на хребтовую раму и вызывают соответствующие вертикальные перемещения отвала, ухудшая планирующие свойства автогрейдера. Другим недостатком этого изобретения являются большие нагрузки в вертикальном шарнире при повороте заднего седельно-сцепного устройства, обусловленные смещением оси вертикального шарнира относительно оси одноосного тягача. Указанные недостатки можно устранить путем изменения конструкции заднего ходового механизма и его седельно-сцепного устройства.
Целью изобретения является повышение надежности автогрейдера.
Достигается тем, что в автогрейдере, включающем отвал, связанный поворотным кругом с тяговой рамой, имеющей шаровой шарнир, закрепленный на хребтовой раме, которая передним и задним концами соответственно опирается на передний и задний ходовые механизмы, гидроцилиндры управления, введены следующие конструктивные изменения, задний ходовой механизм выполнен в виде двух балансирных колесных тележек, которые соединены с хребтовой рамой задним седельно-сцепным устройством, выполненным в виде вертикального и горизонтального поперечного цилиндрических шарниров, причем вертикальный шарнир расположен в центре опорного контура колес заднего ходового механизма.
Новыми существенными признаками изобретения является то, что задний ходовой механизм выполнен в виде двухбалансирных колесных тележек, которые соединены с хребтовой рамой задним седельно-сцепным устройством, выполненным в виде вертикального и горизонтального поперечного цилиндрических шарниров, причем вертикальный шарнир расположен в центре опорного контура колес заднего ходового механизма.
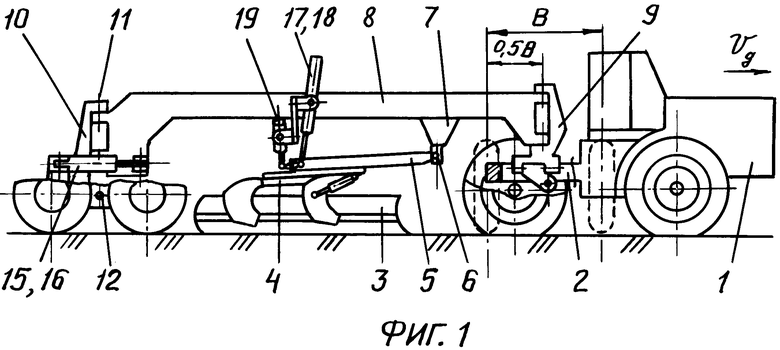
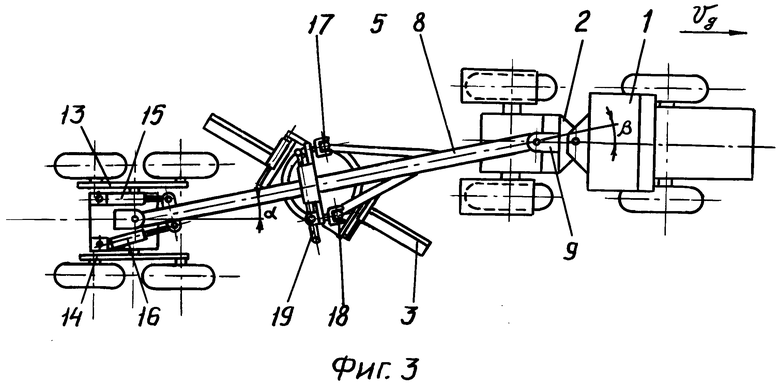
На фиг. 1 показан автогрейдер, вид сбоку; на фиг.2 - вид сверху при отсутствии угла поворота хребтовой рамы относительно продольной оси тягача; на фиг. 3 - вид автогрейдера сверху при работе с заданным углом хребтовой рамы относительно продольной оси тягача.
Автогрейдер включает двухосный тягач 1 с рамой 2, отвал 3, связанный поворотным кругом 4 с тяговой рамой 5, которая имеет шаровой шарнир 6, установленный на кронштейне 7, закрепленном на хребтовой раме 8, которая передним концом связана седельно-сцепным устройством 9 с рамой 2 тягача, а другим соединена с управляемым задним седельно-сцепным устройством 10, имеющим вертикальный цилиндрический шарнир 11 и горизонтальный поперечный шарнир 12, балансирные тележки 13, 14, гидроцилиндры управления 15, 16 образуют задний ходовой механизм. Тяговая рама 5 связана с хребтовой рамой 8 гидроцилиндрами вертикального перемещения 17, 18 и гидроцилиндров 19 бокового выноса тяговой рамы.
На фиг. 1,3 дополнительно показаны: α - угол поворота заднего ходового механизма относительно оси хребтовой рамы; β - угол, образованный хребтовой рамой с осью двухосного тягача; β - колея автогрейдера; Vg - вектор скорости движения автогрейдера.
Автогрейдер работает следующим образом. Рассмотрим три режима работы автогрейдера: 1 - режим копания с фиксацией заднего ходового механизма в соосном положении относительно оси хребтовой рамы; 2 - режим копания с отклонением хребтовой рамы на угол β относительно оси тягача; 3 - транспортный режим.
Для работы автогрейдера в первом режиме копания грунта гидроцилиндрами 15,16 задний ходовой механизм устанавливается соосно с хребтовой рамой 8 (фиг. 2). Отвал 3 устанавливается в заданное положение гидроцилиндрами 17,18,19. При копании грунта движение двухосного тягача происходит в направлении вектора Vg (фиг.2). При этом на отвал действуют боковые силы, которые стремятся сдвинуть вбок хребтовую раму 8 и задние колеса. Конструкция автогрейдера обеспечивает устойчивый режим копания грунта без вмешательства оператора. Благодаря указанному свойству данный автогрейдер имеет неуправляемое переднее седельно-сцепное устройство 9, а из-за симметричного расположения поперечного шарнира 12 и вертикального шарнира 11 заднего седельно-сцепного устройства 10 нагрузки в хребтовой раме 8 и гидроцилиндрах 15,16 минимальны, что обеспечивает повышение надежности автогрейдера. В рассмотренном режиме автогрейдер может выполнять любые технологические операции, присущие современным автогрейдерам.
Второй режим работы используется, когда по технологическим условиям требуется вынос хребтовой рамы в плане. Для реализации этого режима гидроцилиндрами 15,16 задний ходовой механизм устанавливается под углом α к оси хребтовой рамы (фиг.3).
Если после установки заднего ходового механизма под углом α к оси хребтовой рамы угол β был равен нулю, то при движении тягача хребтовая рама 8 сама устанавливается под углом α = β к продольной оси тягача (фиг.3). После установки хребтовой рамы в положение, соответствующее заданному углу α оператор устанавливает отвал 3 гидроцилиндрами 17,18,19 в требуемое рабочее положение. При движении тягача 1 происходит процесс копания грунта. Боковая сила, возникающая на отвале 3, стремится сдвинуть хребтовую раму и колеса заднего ходового механизма от заданного курса движения, однако, возникающий угол бокового увода колес возвращает хребтовую раму в заданное положение, обеспечивая устойчивый режим процесса копания. Для работы в транспортном режиме гидроцилиндрами 15,16 задний ходовой механизм устанавливается в соосное положение с осью хребтовой рамы (фиг.2).
При движении в транспортном режиме с поднятым отвалом хребтовая рама 8 с колесами заднего ходового механизма в ведомом режиме копирует движение двухосного тягача 1. Конструкция хребтовой рамы и расположение шарнира 6 тяговой рамы обеспечивает высокую маневренность автогрейдера и поворот, обеспечивая угол складывания β = 90о (пунктирное положение колес двухосного тягача на фиг.1).
Предлагаемое изобретение обеспечивает меньшие нагрузки в седельно-сцепных устройствах за счет оптимального расположения шарниров заднего седельно-сцепного устройства и за счет выполнения переднего седельно-сцепного устройства неуправляемым.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОГРЕЙДЕР НА ДВУХОСНОМ ТЯГАЧЕ | 1992 |
|
RU2041319C1 |
| АВТОГРЕЙДЕР | 1992 |
|
RU2046887C1 |
| АВТОГРЕЙДЕР | 1993 |
|
RU2034116C1 |
| ТРЕХОСНЫЙ АВТОГРЕЙДЕР | 2000 |
|
RU2200799C2 |
| Автогрейдер | 1982 |
|
SU1051172A1 |
| Автогрейдер | 1989 |
|
SU1701837A1 |
| АВТОГРЕЙДЕР | 1993 |
|
RU2036277C1 |
| Рабочее оборудование автогрейдера | 1991 |
|
SU1801163A3 |
| Землеройно-транспортный агрегат | 1979 |
|
SU787568A2 |
| АВТОГРЕЙДЕР | 1993 |
|
RU2036278C1 |

Использование: землеройно-транспортные машины, а именной автогрейдеры. Сущность изобретения: задний ходовой механизм выполнен в виде двух балансирных тележек, которые соединены с хребтовой рамой вертикальным поперечным цилиндрическим шарниром и горизонтальным поперечным цилиндрическим шарниром. Вертикальный шарнир расположен в центре опорного контура колес заднего ходового механизма. 3 ил.
АВТОГРЕЙДЕР, включающий отвал, связанный поворотным кругом с тяговой рамой, имеющей шаровой шарнир, закрепленный на хребтовой раме, которая передним и задним концами соответственно опирается на передний и задний ходовые механизмы, гидроцилиндры управления, отличающийся тем, что задний ходовой механизм выполнен в виде двух балансирных колесных тележек, которые соединены с хребтовой рамой задним седельно-сцепным устройством, выполненным в виде вертикального и горизонтального поперечного цилиндрических шарниров, причем вертикальный шарнир расположен в центре опорного контура колес заднего ходового механизма.
| Патент США N 4364438, кл.E 02F 3/76, опублик | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
