Изобретение относится к точному приборостроению и может быть использовано преимущественно в прецизионных инерциальных системах управления движением, например, самолетов, ракет, подводных лодок и других объектов.
Известные конструкции акселерометров содержат корпус, инерционную массу, упругий или электромагнитный подвес и датчик перемещений инерционной массы.
Известен акселерометр с упругой подвеской инерционной массы консольного типа, съем информации о положении которой производится с помощью сигнальной избирательной катушки, заэкранированной от электромагнитных наводок магнитным экраном, для съема сигнала с избирательной катушки применены токоподводы С-образной формы [1]
Наличие в конструкции таких акселерометров токоподводов для съема информации о положении инерционной массы, необходимость применения экрана для защиты датчика перемещений, демпфера для демпфирования колебаний инерционной массы, низкая точность взаимного расположения элементов акселерометров, влияющих на их точностные и динамические характеристики, усложняют конструкцию акселерометра и в значительной степени определяют величину возмущающего момента по оси чувствительности прибора.
Замена сигнальной избирательной катушки (индукционного датчика) на дифференциальный емкостной датчик с одной подвижной и двумя неподвижными обкладками (пластинами) улучшают (упрощают) конструкцию акселерометра, повышают его точностные характеристики, однако при простой замене датчика все же требуется: токоподвод для подсоединения к подвижной пластине, экранировка датчика и демпфирующее устройство, уменьшающее влияние механических воздействий вдоль плоскостей пластин. Все это затрудняет получить высокую точность взаимной ориентации элементов акселерометра, влияющих на его точностные и динамические характеристики [2]
Повышение точности акселерометра, содержащего корпус, подвижную часть, подвес подвижной части, дифференциальный емкостной датчик перемещений с подвижной и двумя неподвижными пластинами, токоподводы и усилительно-преобразовательный блок, достигается тем, что он снабжается цилиндрическим диэлектрическим стержнем, на котором расположены неподвижные пластины емкостного датчика, а в подвижной части предусмотрена цилиндрическая пластина емкостного датчика, при этом диэлектрический стержень укреплен в корпусе так, что входит в цилиндрическую выемку подвижной части.
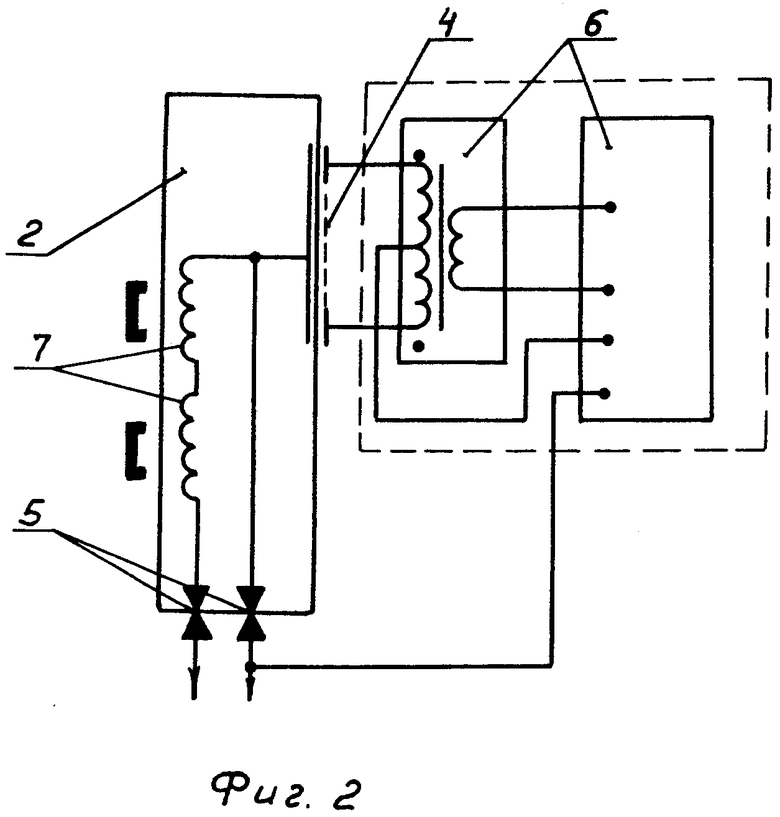
На фиг. 1 приведена конструкция описываемого акселерометра; на фиг. 2 то же, его принципиальная электрическая схема.
Акселерометр состоит из корпуса 1, подвижной части 2, подвеса подвижной части 3, диэлектрического цилиндрического стержня 4 с двумя неподвижными пластинами дифференциального емкостного датчика, упругих шарниров 5, усилительно-преобразовательного блока 6 и двух катушек возврата, при этом диэлектрический цилиндрический стержень 4 укреплен в корпусе акселерометра 1 так, что он входит в цилиндрическую выемку подвижной части 2 акселерометра.
Подвижная часть 2 представляет собой металлическую рамку прямоугольной формы с цилиндрическим хвостовиком, в центре которой выполнено отверстие. Поверхность отверстия является подвижной обкладкой емкостного датчика. На торцах подвижной части находятся две катушки возврата 7, соединенные последовательно (фиг.2). Хвостовик подвижной части закреплен в подвесе 3, который крепится к корпусу 1 (фиг.1). Подвес прибора состоит из двух керамических деталей, соединенных между собой двумя металлическими шарнирами 5 с утоньшениями в центральной части. Шарниры 5 выполнены из сплава со стабильными упругими свойствами, которые имеют малую жесткость в направлении действия измеряемого ускорения и большую жесткость в двух других взаимно перпендикулярных направлениях. Шарниры изолированы от корпуса прибора и подвижной части и служат токоподводами катушек возврата и подвижной обкладки емкостного датчика.
Информация о положении подвижной части выдается при помощи емкостного датчика, который имеет три обкладки: одну подвижную (внутреннюю поверхность отверстия подвижной части 2 акселерометра) и две неподвижные, расположенные на диэлектрическом цилиндрическом стержне 4. Диэлектрический стержень 4 крепится в цилиндрическом (полуцилиндрическом) отверстии корпуса 1 акселерометра. При смещении подвижной части 2 упругие шарниры изгибаются и изменяются зазоры между подвижной и неподвижными пластинами дифференциального емкостного датчика и происходит дифференциальное изменение его емкостей.
Для уменьшения паразитных емкостей и обеспечения экранирования неподвижные (измерительные) пластины емкостного датчика находятся внутри подвижной части 2 акселерометра. Такое размещение неподвижных пластин позволяет также использовать цилиндрический стержень 4 в качестве демпфера для подвижной части 2 акселерометра и повысить точность взаимной ориентации и стабильность взаимного положения неподвижных и подвижных пластин емкостного датчика.
Предлагаемая конструкция позволяет уменьшить габариты и вес акселерометра за счет совмещения функций: подвеса и токоподвода, емкостного датчика и демпфера. Кроме того, при этом нет надобности в экранах для экранирования датчика перемещений от электромагнитных полей, а цилиндрическая поверхность пластин емкостного датчика увеличивает линейность его характеристики. При этом обеспечивается также высокая точность взаимной ориентации элементов акселерометра.
Вся совокупность примененного технического решения в предлагаемой конструкции акселерометра повышает его точность.
Использование: приборы измерительной навигации, акселерометры. Сущность: акселерометр содержит корпус 1, подвижную часть 2, подвес 3 подвижной части, дифференциальный емкостный датчик смещения с подвижной и двумя неподвижными пластинами, токоподводы и усилительно-преобразовательный блок 6, диэлектрический цилиндрический стержень 4, на котором расположены неподвижные пластины емкостного датчика, а в подвижной части 2 предусмотрена цилиндрическая выемка, на внутренней поверхности которого закреплена подвижная пластина емкостного датчика, при этом диэлектрический стержень 4 укреплен в корпусе 1 так, что входит в цилиндрическую выемку в подвижной части 2. 2 ил.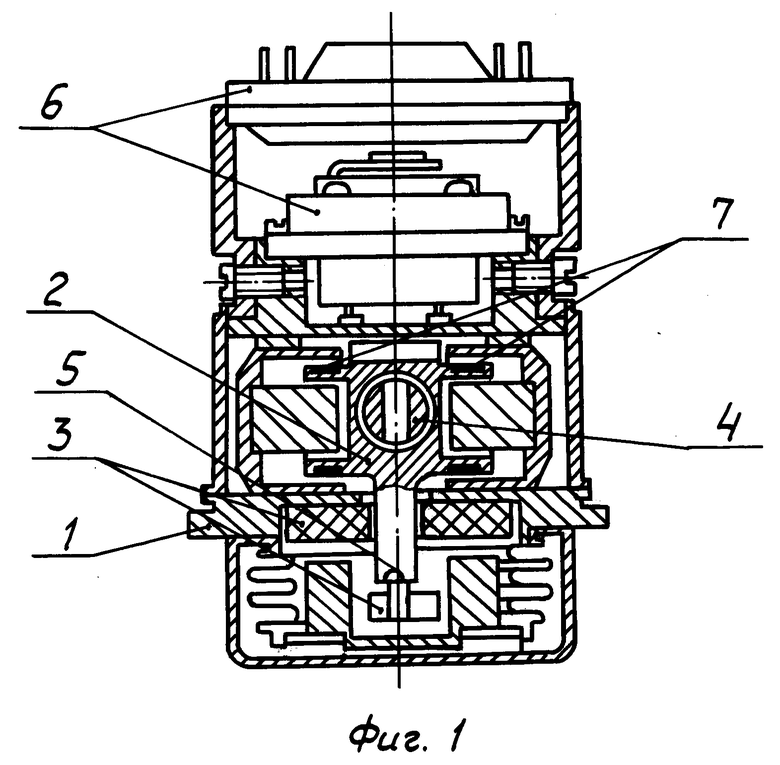
АКСЕЛЕРОМЕТР, содержащий корпус, подвижную часть, подвес подвижной части, дифференциальный емкостный датчик смещения с подвижной и двумя неподвижными пластинами, токоподводы и усилительно-преобразующий блок, отличающийся тем, что, с целью повышения точности, он снабжен диэлектрическим цилиндрическим стержнем, на котором размещены неподвижные пластины емкостного датчика, а в подвижной части предусмотрена цилиндрическая выемка, на внутренней поверхности которой закреплена подвижная пластина емкостного датчика, при этом диэлектрический стержень укреплен в корпусе так, что входит в цилиндрическую выемку подвижной части.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| В.П | |||
| Бухгольц и др | |||
| Емкостные преобразователи в системах автоматического контроля и управления | |||
| Энергия, 1972, с.5, 21-22. | |||
