Изобретение относится к области электрических измерений неэлектрических величин и может быть использовано в гироскопических чувствительных элементах систем стабилизации, измерения и в других областях техники, где необходимо измерять угловые отклонения (вибрации, биения) вращающихся валов (роторов).
Известен целый ряд датчиков, позволяющих осуществлять преобразование углового отклонения ротора в изменение какого-либо параметра (L, R, C и др.) или характеристики электрического сигнала (амплитуды, фазы и др.).
Описание и конструкция различных датчиков приведены в технической литературе, например, А.М.Туричин. Электрические измерения неэлектрических величин. М.-Л., Энергия, 1966 г.; Ю.И.Иориш. Виброметрия. М., 1963 г.
Наибольшее применение для измерения угловых отклонений вращающихся роторов, например, гироскопов по отношению к корпусу нашли индуктивные, емкостные и индукционные преобразователи угловых отклонений вращающегося ротора в электрический сигнал (датчики угла) (см., например, Красовский А.А. и др. Одноканальные двумерные измерительные и управляющие системы. Труды ВВИОЛКА им. Н.Е.Жуковского, вып. 1207, 1967, стр. 36-65, патент США N 3354726, кл. 74-5, 1967).
Известная конструкция датчика угла емкостного типа, используемая в динамически настраиваемом гироскопе, имеет простую и температурностабильную конструкцию и низкий (практически нулевой) уровень газоотделения.
Ввиду малых размеров роторов приборов и зависимости емкости от площади электродов и зазора между ними последний должен быть малым (≈ 0,3-0,1 мм), поэтому с целью исключения отрицательного влияния аэродинамических сил на параметры гироскопа, давление во внутренней полости гироскопа при использовании емкостного датчика угла должно быть низким (≈ 10-1-10-2 мм рт.ст.).
Менее жесткие требования к давлению во внутренней полости гироскопа предъявляются при использовании других типов датчиков, например, индуктивных, индукционных, параметры которых в меньшей степени зависят от сечения магнитопровода.
В качестве прототипа авторами выбран датчик угла индукционного типа, используемый в гироскопе по патенту США N 3354726, кл. 74-5, 1967. При малом зазоре между полюсными наконечниками такого датчика влияние аэродинамических сил на параметры гироскопа мало сказывается из-за малой площади полюсов.
Конструктивно индукционный датчик угла представляет собой постоянный магнит, закрепленный на роторе гироскопа (чувствительном элементе) и четыре катушки индуктивности с разомкнутыми магнитопроводами, закрепленные на корпусе гироскопа, полюса которых обращены к постоянному магниту. При измерении углового положения ротора гироскопа по отношению к 2-м, расположенным через 180o катушкам, уровень наведенной ЭДС сигнала в них изменяется в противоположные стороны. Разность амплитуд наведенной ЭДС сигналов с противоположных катушек несет в себе информацию об угловом отклонении ротора гироскопа.
Наличие магнитотвердого материала (постоянного магнита) на роторе гироскопа требует тщательной экранировки от внешних магнитных полей, подбора материала ротора и магнита по температурным коэффициентам линейного расширения с целью сохранения балансировки ротора в диапазоне рабочих температур, а также обуславливает воздействие магнитных сил на ротор гироскопа из-за замыканий полей рассеяния постоянного магнита через элементы конструкции прибора. Кроме того режим работы датчика угла с амплитудной модуляцией затрудняет непосредственную стыковку датчика угла с дискретными системами обработки информации с гироскопа.
Целью настоящего изобретения является устранение перечисленных недостатков.
Эта цель достигается при использовании электромагнитного датчика угла (ЭДУ), состоящего из закрепленного на роторе гироскопа многосекционного якоря, выполненного в виде винтовых линий, неоднородных по магнитным свойствам с материалом обода ротора, а на корпусе гироскопа установлены четыре электромагнитных датчика импульсов (ЭМД) с зазором в магнитной цепи, соизмеримым с толщиной винтовой линии якоря. Конструкция и принцип действия ЭМД основаны на замыкании винтовой линией зазора(ов) в магнитной цепи, аналогичны, например, описанному в информационно-справочном листке Министерства радиопромышленности СССР N 022401, июнь 1971 г. ЭМД закрепляется в корпусе гироскопа диаметрально противоположно в направлении осей чувствительности гироскопа в экваториальной плоскости ротора; при этом углы наклона винтовых линий якоря и разворот средней линии зазора магнитной цепи по отношению к экваториальной плоскости ротора гироскопа равны, а наклон их такой, что при минимальном удалении винтовой линии якоря и ЭМД винтовая линия якоря и средняя линия зазора магнитной цепи лежат в одной плоскости
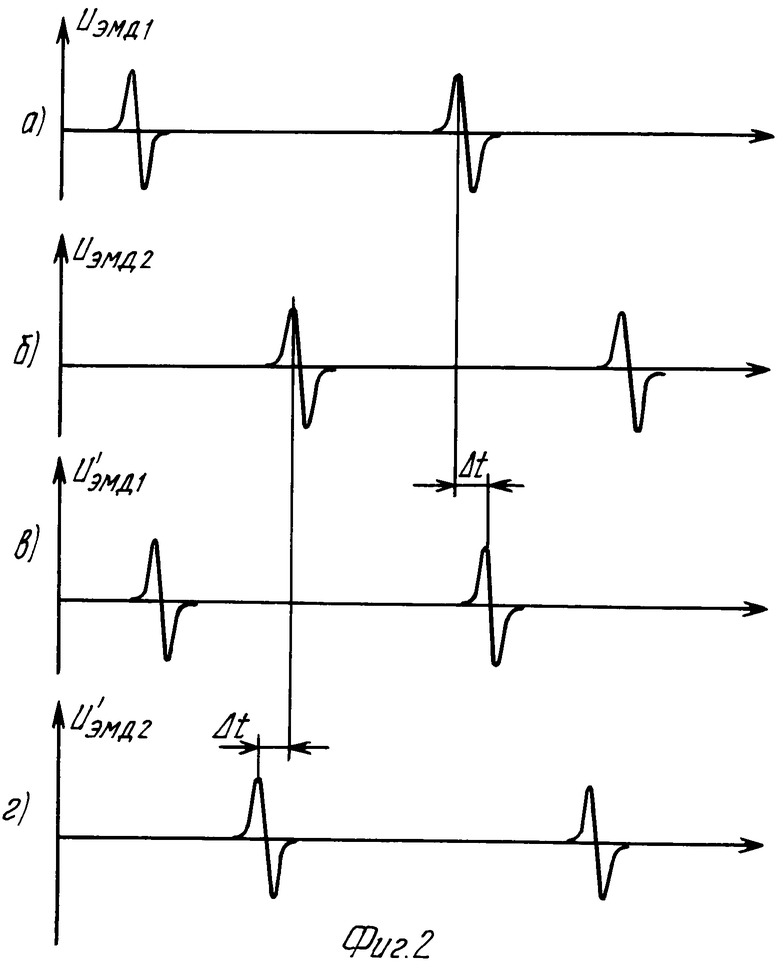
Принцип работу ЭДУ заключается в том, что при вращении ротора гироскопа винтовые линии якоря, проходя в зоне немагнитного зазора магнитной цепи ЭМД, вызывают изменение магнитного потока, а следовательно, индуцирование напряжения в катушке ЭМД. При неотклоненном роторе гироскопа фазовый сдвиг импульсов противоположных головок равен 180o. При отклонении ротора по одной из осей чувствительности происходит взаимное (встречное или противоположное) смещение импульсов, вырабатываемых противоположными ЭМД, совпадающими с этой осью чувствительности, т.е. в предлагаемом ЭДУ информация об угле отклонения ротора заключается во временном сдвиге импульсов ЭМД.
На фиг. 1 показан общий вид предложенного ЭДУ применительно к использованию его в динамически настраиваемом гироскопе. ЭДУ состоит из многосекционного якоря 1, выполненного в виде винтовых линий, закрепленного на ободе ротора гироскопа 2 с упругим подвесом 3 и четырех ЭМД 4, закрепленных в корпусе гироскопа 5.
На фиг. 2а изображены временные диаграммы импульсов с ЭМД по одной из осей чувствительности гироскопа при неотклоненном по этой оси чувствительности роторе, на фиг. 2б - при отклоненном по этой же оси чувствительности роторе. На фиг. 3а - суммарный вектор и составляющие вектора сил взаимодействия между ЭМД и якорем, лежащим в плоскостях, параллельной и перпендикулярной плоскости вращения ротора при приближении винтовой линии якоря к немагнитному зазору ЭМД, на фиг. 3б - те же векторы при удалении винтовой линии якоря от зазора ЭМД.
Для измерения угловых отклонений ротора гироскопа относительно корпуса по двум ортогональным осям чувствительности гироскопа, лежащим в экваториальной плоскости ротора, в корпусе гироскопа диаметрально противоположно установлены четыре ЭМД по два на каждую ось чувствительности. Два ЭМД по каждой оси необходимы для устранения влияния осевых смещений (перемещений) ротора гироскопа относительно корпуса на точность измерения угла.
На ободе ротора гироскопа закреплен многосекционный якорь из магнитомягкого материала, состоящий из нечетного числа винтовых линий, например, нарезана многозаходная резьба. Промежутки между винтовыми линиями (винтовые канавки) с целью исключения отрицательного влияния аэродинамических сил заполнены немагнитным материалом. Для исключения влияния осевых вибраций и несбалансированности ротора на результат измерения угла отклонения ротора число винтовых линий выбирается больше возможной гармоники вибраций ротора гироскопа. Нечетное число винтовых линий необходимо для более простого и точного определения направления отклонения ротора гироскопа, то есть для обеспечения начального (соответствующего нулевому неотклоненному положению ротора) фазового сдвига между сигналами с противоположных индукторов на половину периода (180o) импульсов ЭМД. Для исключения "перехлестывания" импульсов, то есть превышения величины начального (180o) сдвига суммарным фазовым сдвигом импульсов с диаметрально расположенных индукторов в случае максимального отклонения ротора, необходимо выполнение неравенства: ,
,
где
α - максимальный угол отклонения ротора;
a - ход винтовой линии;
r - радиус наружной поверхности ротора;
n - число винтовых линий.
Ход винтовой линии выбирается из технологических соображений, например, при нарезке винтовых линий на токарных станках - по техническим данным токарных станков.
Расчет взаимного смещения (сдвига) импульсов с противоположных ЭМД в масштабе времени может быть произведен по формуле: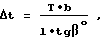 ,
,
где
l - длина окружности ротора (по наружной поверхности);
b - смещение экваториальной плоскости ротора гироскопа вдоль оси, параллельной оси вращения ротора, при заданном (определяемом) угловом отклонении ротора;
T - период вращения ротора;
β - угол наклона винтовой линии.
Например, для ротора диаметром 32 мм с углом наклона винтовой линии 15o, при угловом отклонении ротора на одну угловую минуту, вращающегося с частотой 500 Гц (T = 2•103 м/с) относительный временной сдвиг равен: .
.
Величина постоянного уводящего момента от магнитных полей ЭМД, действующего на ротор гироскопа в направлении, перпендикулярном плоскости вращения ротора, определяется разностью моментов от составляющих сил, направленных перпендикулярно плоскости вращения ротора, при приближении винтовой линии якоря к немагнитному зазору ЭМД и при удалении его от немагнитного зазора ЭМД, а также от разности сил притяжения между ротором гироскопа и ЭМД при исходном (неотклоненном) и отклоненном роторе.
Для исключения одновременного взаимодействия нескольких винтовых линий якоря с рабочей зоной ЭМД (с рабочими торцами полюсных наконечников ЭМД), расстояние между винтовыми линиями должно быть больше ширины рабочей зоны ЭМД, то есть больше суммы толщин полюсных наконечников и немагнитного зазора ЭМД.
Для уменьшения результирующего уводящего момента от магнитных полей ЭМД, действующего в направлении, перпендикулярном плоскости вращения ротора, наружная поверхность ротора, обращенная к рабочим торцам полюсных наконечников ЭМД, выполнена в виде сферы (радиуса r), центр которой совпадает с точкой подвеса ротора.
Использование ЭДУ позволяет:
- снизить требования к степени вакуумирования внутренней полости устройств, в которых он используется;
- исключить применение дополнительных источников для питания ЭДУ;
- повысить помехозащищенность сигналов, так как используется режим фазовой модуляции;
- осуществить простое преобразование информации в дискретную форму.
Испытания макетных образцов ЭДУ подтвердили их преимущество по сравнению с другими датчиками угла.
Намечено изготовление опытной партии заявляемого ЭДУ в составе одного из динамически настраиваемых гироскопов.

Использование: в гироскопических чувствительных элементах систем стабилизации. Сущность изобретения: электромагнитный датчик угла поворота ротора гироскопа содержит катушки индуктивности с магнитопроводами, установленные в корпусе гироскопа, и закрепленный на ободе ротора якорь. Якорь выполнен в виде ряда винтовых линий. Каждый магнитопровод выполнен с немагнитным зазором и снабжен постоянным магнитом. Угол наклона средней линии немагнитного зазора магнитопровода равен углу наклона винтовой линии якоря к экваториальной плоскости ротора. 3 ил.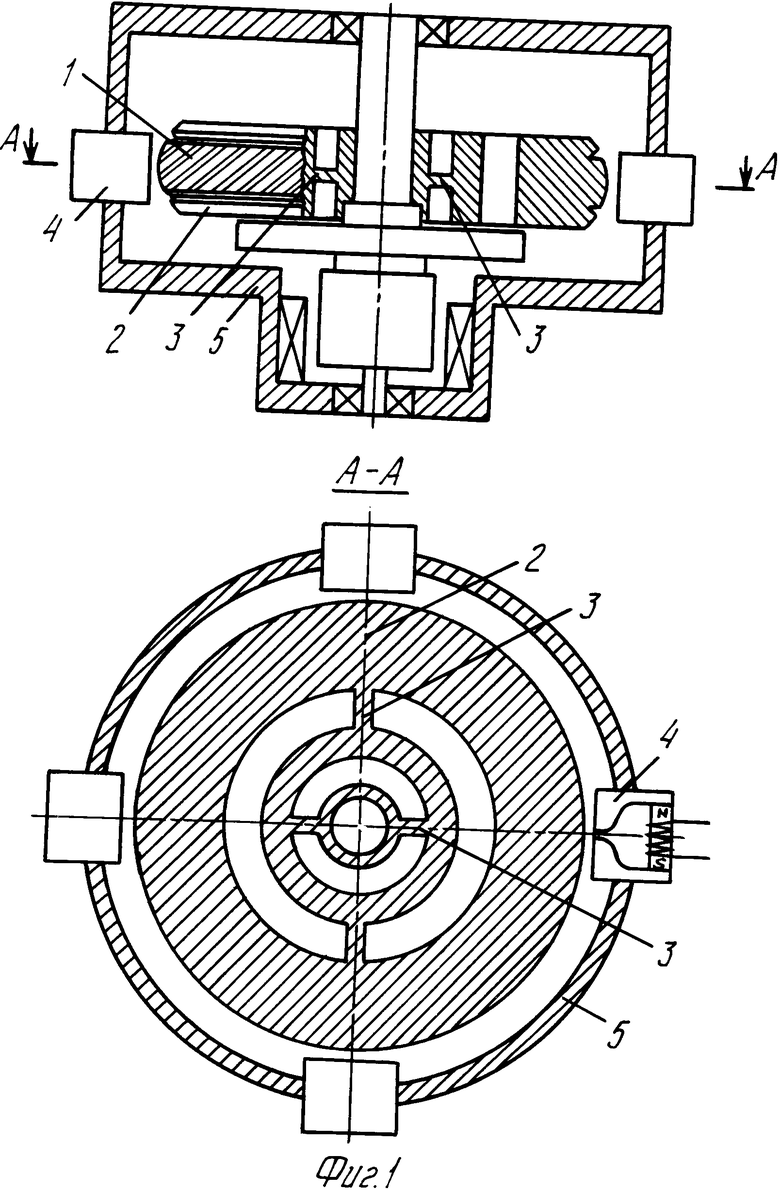
Электромагнитный датчиик угла поворота ротора гироскопа, содержащий катушки индуктивности с магнитопроводами, установленные в корпусе гироскопа, и закрепленный на ободе ротора якорь, отличающийся тем, что, с целью повышения точности гироскопа якорь выполнен в виде ряда винтовых линий, каждый магнитопровод выполнен с немагнитным зазором и снабжен постоянным магнитом, причем угол наклона средней линии немагнитного зазора магнитопровода равен углу наклона винтовой линии якоря к экваториальной плоскости ротора.
| Патент США N 3354726, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
