Изобретение относится к точному приборостроению, а точнее к измерителям компенсационного типа с магнитоэлектрическими датчиками силы или момента.
Известны схемы компенсации температурного изменения масштабного коэффициента, в которых в качестве компенсирующего элемента используются электрические или термомагнитные шунты [1]
Использование термомагнитных шунтов в конструкции датчика силы затрудняет подбор термошунта с необходимыми для точной компенсации параметрами. Особенно этот процесс усложняется для акселерометров, внутренняя полость которых заполнена демпфирующей жидкостью. Использование электрических шунтов, включаемых параллельно обмотке катушки датчика силы, позволяет решать задачу регулирования степени компенсации, однако из-за нелинейной зависимости тока в измерительной цепи акселерометра от температуры при больших диапазонах изменения температуры эффект от введения компенсации незначителен.
Этот акселерометр имеет невысокую точность измерений из-за большой температурной погрешности.
Целью изобретения является повышение точности компенсации температурного изменения масштабного коэффициента акселерометра.
Для достижения цели параллельно обмотке рамки датчика момента, в конструкциях которых используют датчики силы параллельно обмотке рамки датчика силы, подключается вход преобразователя напряжение-ток, выходной ток преобразователя подается на вход преобразователя выходной информации или же в измерительную цепь акселерометра. Направление выходного тока преобразователя выбирают, исходя из знака температурного изменения масштабного коэффициента.
Температурная зависимость тока на выходе преобразователя имеет вид:
Δiк= i (1+Kθ)(1+αpθ) где io величина тока обратной связи при начальной температуре;
(1+Kθ)(1+αpθ) где io величина тока обратной связи при начальной температуре;
R сопротивление обмотки рамки при начальной температуре;
сопротивление обмотки рамки при начальной температуре;
R сопротивление регулировочного резистора;
К температурный коэффициент масштаба акселерометра;
αр- ТКС обмотки рамки;
θ- разница между текущим и начальным значениями температуры. При выполнении условия ·(K+αp) K ток в измерительной цепи акселерометра
·(K+αp) K ток в измерительной цепи акселерометра
iк= io·  ·(1-K2·θ2) а температурная погрешность акселерометра
·(1-K2·θ2) а температурная погрешность акселерометра
δi= K2˙θ2 Видим, что квадратичный член в температурной зависимости остается, но доля его влияния по сравнению с описанной схемой прототипа существенно меньше. При тех же значениях параметров температурная погрешность акселерометра
δi= 4˙10-8 ˙900 3,6˙10-5, то есть температурная погрешность акселерометра при использовании предлагаемой схемы компенсации уменьшается более чем в 30 раз.
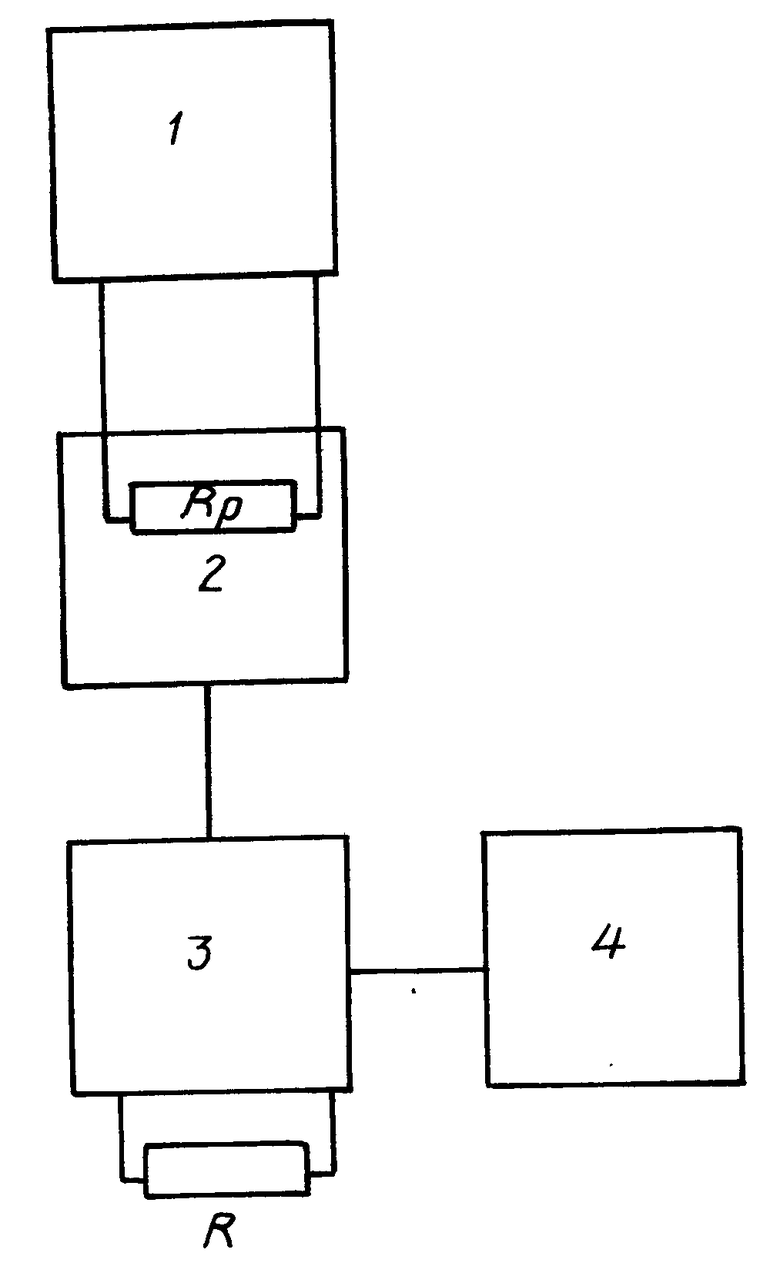
На чертеже приведена схема соединений элементов предлагаемого акселерометра.
Схема содержит усилитель 1 обратной связи, датчик 2 силы акселерометра, преобразователь 3 напряжение-ток (ПНТ), преобразователь 4 выходной информации, R-регулировочный резистор, Rp-сопротивление обмотки ДС. Преобразователь ПНТ представляет собой источник тока, управляемый напряжением с дифференциальным входом.
Работа заявляемого акселерометра подобна прототипу, за исключением того, что из тока обратной связи, протекающего в измерительной цепи, вычитается ток температурной компенсации.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 1986 |
|
RU2042955C1 |
| ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 1992 |
|
RU2066863C1 |
| АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА | 1988 |
|
RU2041465C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1988 |
|
RU2065575C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| МОМЕНТНОЕ УСТРОЙСТВО ДЛЯ ГИРОСКОПА | 1986 |
|
RU2129255C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРЕЦЕССИЕЙ РОТОРА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2061207C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| АКСЕЛЕРОМЕТР | 1979 |
|
RU2041464C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ АКСЕЛЕРОМЕТРА | 1988 |
|
RU2039354C1 |
Использование: приборы инерциальной навигации, акселерометры. Сущность изобретения: для повышения точности измерений в акселерометр, содержащий чувствительный элемент с магнитоэлектрическим датчиком силы, усилитель обратной связи и преобразователь выходной информации, введен преобразователь напряжение-ток с определенным согласованием параметрических элементов. 1 ил.
АКСЕЛЕРОМЕТР КОМПЕНСАЦИОННОГО ТИПА, содержащий чувствительный элемент с магнитоэлектрическим датчиком силы, усилитель обратной связи, преобразователь выходной информации, отличающийся тем, что, с целью повышения точности акселерометра, в него дополнительно введен преобразователь напряжение ток, вход которого подключен параллельно обмотке датчика силы, а выход соединен с входом преобразователя выходной информации, при этом величины сопротивлений обмотки датчика силы и регулировочного резистора преобразователя напряжение
ток связаны соотношением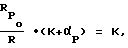
где  сопротивление обмотки датчика силы при начальной температуре;
сопротивление обмотки датчика силы при начальной температуре;
R сопротивление регулировочного резистора;
K коэффициент температурного изменения масштаба акселерометра;
αP температурный коэффициент сопротивления обмотки датчика силы.
| Сборник статей под ред | |||
| д | |||
| т | |||
| н | |||
| проф | |||
| Б | |||
| А | |||
| Рябова | |||
| Труды института МАИ, вып | |||
| Раздвижной паровозный золотник со скользящими по его скалке поршнями и упорными для них шайбами | 1922 |
|
SU147A1 |
