Изобретение относится к гироскопии и может быть использовано в системах инерциального управления объектами.
Известны динамически настраиваемые гироскопы (ДНГ), содержащие ротор, опоры, датчики угла, корпус /1, 2/.
Недостатками известных ДНГ являются низкая точность и большие габариты при заданной перегрузочной способности.
Прототипом изобретения является динамически настраиваемый гироскоп (ДНГ), содержащий корпус, ротор и датчики угла, закрепленные во вращающейся герметичной ампуле, электропривод, высокоскоростные газодинамические опоры, устройство передачи информации от датчиков к корпусу и устройство передачи энергии от корпуса /3/.
Недостатками этого ДНГ являются низкая точность и большие габариты.
Целью изобретения является повышение точности и сокращение габаритов ДНГ при заданной перегрузочной способности.
Цель достигается тем, что опорные поверхности газодинамических опор выполнены в корпусе полусферическими, а подвижные элементы выполнены в виде двух жестко связанных фланцев, каждый с аналогичной опорной поверхности корпуса рабочей поверхностью и с внутренней полостью, причем во внутренней полости первого фланца установлена герметичная ампула и дополнительно введен преобразователь сигнала датчика угла в код, а во внутреннюю полость второго фланца установлены элементы электропривода.
Кроме того, устройства передачи энергии могут быть выполнены в виде трансформаторного угла, неподвижная часть которого закреплена в корпусе, а подвижная часть на первом фланце.
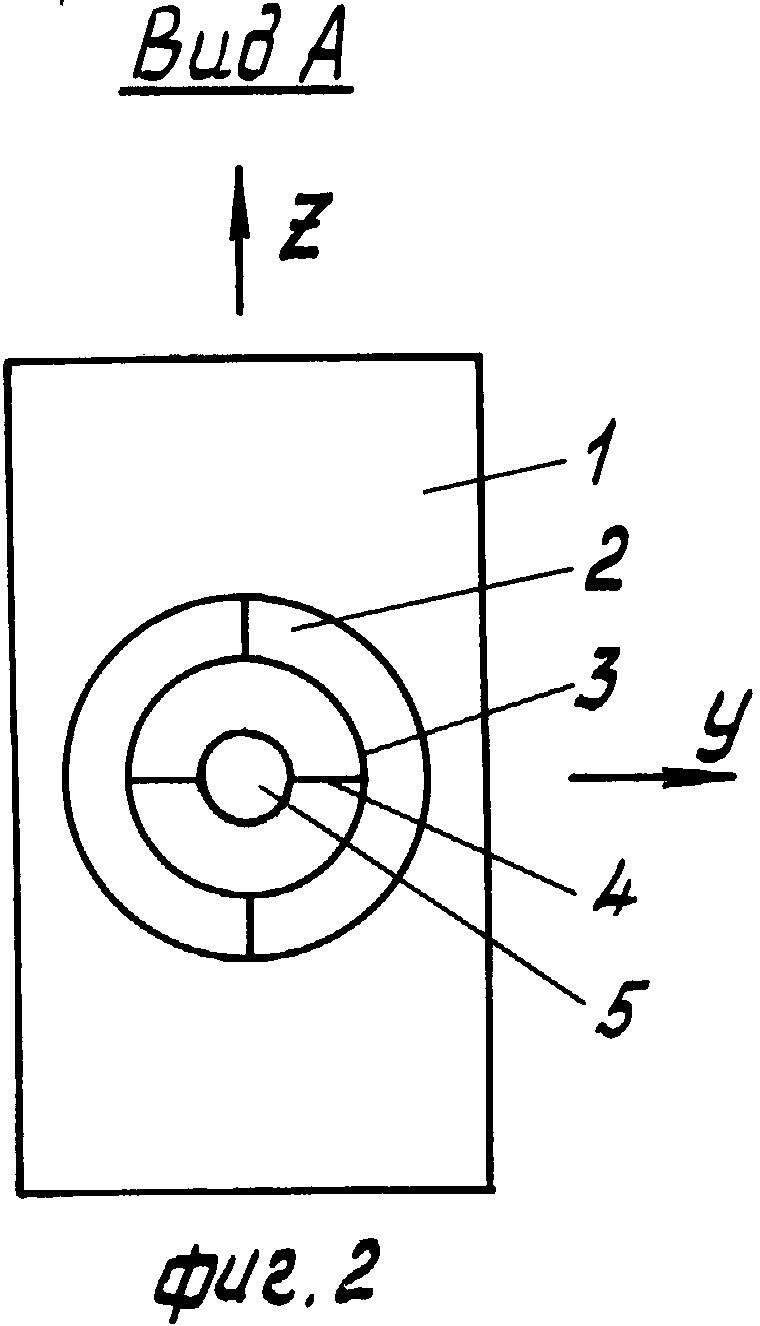
На фиг. 1 представлена конструкция ДНГ в частном случае его выполнения; на фиг. 2 вид по стрелке А фиг. 1; на фиг. 3 блок обработки информации ДНГ.
Гироскоп содержит ротор 1, наружные торсионы 2, кольцо 3, внутренние торсионы 4, кронштейн 5, первую ампулу 6, емкостные датчики угла 7, 8, вторую ампулу 9, автогенераторы 10, 11, смеситель 12, выпрямитель 13, первичную обмотку первого трансформатора 14, вторичную обмотку второго трансформатора 15, фланец 16, стяжку 17, фланец 18, корпус 19, втулку 20, ротор приводного двигателя 21, постоянные магниты 22, 23, статор приводного двигателя 24, генераторы опорных импульсов 25, 26, вторичную обмотку первого трансформатора 27, первичную обмотку второго трансформатора 28, частотный детектор 29, фазовые дискриминаторы 30, 31.
Ротор 1 (фиг. 1), имеющий неравные главные экваториальные моменты инерции относительно взаимно ортогональных осей Y и Z (фиг. 2), укреплен с помощью пары наружных торсионов 2, кольца 3, пары внутренних торсионов 4 на кронштейне 5, неподвижно установленном в первой металлической герметичной ампуле 6 (фиг. 1). В ампуле соответственно ротору укреплены емкостные датчики угла (ЕДУ) 7, 8.
С ампулой 6 непосредственно соприкасается вторая металлическая герметичная ампула 9, в которой установлен преобразователь "девиация емкости - код". Преобразователь содержит автогенераторы (АГ) 10, 11, смеситель 12, выпрямитель 13. На второй ампуле закреплены первичная обмотка 14 первого трансформатора и вторичная обмотка 15 второго трансформатора. Ампулы 6, 9 и обмотки 14, 15 образуют выполненный в виде съемного модуля информационный блок, укрепленный на фланце 16 газодинамической опоры. Фланец 16 с помощью стяжки 17 соединен неподвижно с фланцем 18. Фланцы 16, 18 выполнены с полусферическими поверхностями L, имеющими твердое покрытие и спиральные канавки для обеспечения работоспособности газодинамической опоры (на фиг. 1 канавки не показаны). С зазором 4-5 мкм фланцы 16, 18 установлены в корпусе 19. Стабильность зазора обеспечивается распорной втулкой 20 между фланцами. Во фланце 18 укреплен ротор 21 приводного двигателя и два постоянных магнита (ПМ) 22, 23, расположенных через 180o по диаметру фланца и противоположно намагниченных. Соответственно ротору 21 в корпусе укреплен статор 24 приводного двигателя. Соответственно ПМ в корпусе через 90o укреплены генераторы опорных импульсов (ГОИ) 25, 26 (на фиг. 3 показаны оба ГОИ, на фиг. 1 только ГОИ 25). Соответственно обмоткам 14, 15 в корпусе установлены вторичная обмотка 27 первого трансформатора и первичная обмотка 28 второго трансформатора.
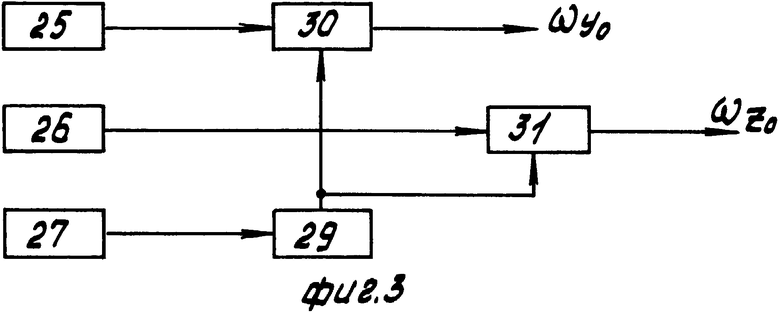
В корпусе установлены также частотный детектор (ЧД) 29, фазовые дискриминаторы (ФД) 30, 31 (фиг. 3).
Оси обмоток 14, 15, 27, 28 параллельны оси X0 вращения приводного вала, образованного фланцами 16, 18, стяжкой 17, втулкой 20. Полярная ось ротора 1 параллельна оси X0.
Выходы ЕДУ 7, 8 (фиг. 1) соединены с входами преобразователя "девиация емкости код" (с первыми входами АГ 10, 11 соответственно). Обмотка 15 соединена с третьим входом преобразователя (входом выпрямителя 13). Выходы АГ 10, 11 подключены соответственно к первому и второму входам смесителя 12. Выход выпрямителя 13 соединен с вторыми входами АГ 10, 11 и третьим входом смесителя 12. Выход смесителя 12 (выход преобразователя "девиация емкости - код") подключен к обмотке 14 первого трансформатора. Выход вторичной обмотки 27 первого трансформатора через ЧД 29 (фиг. 3) подключен к первым входам ФД 30, 31, вторые входы которых соединены с выходами ГОИ 25, 26 соответственно.
Гироскоп работает следующим образом.
Информационный блок, состоящий из узлов 6, 9, 14, 15, и приводной вал, состоящий из элементов 16, 18, 17, 20, приведены во вращение со скоростью динамической настройки ωдин вокруг оси X0 от приводного двигателя, содержащего статор 24 и ротор 21. ПМ 22, 23, проходя под ГОИ 25, 26, генерируют в них опорные импульсы с частотой Ω поступающие на вторые входы ФД 30, 31. Напряжение питания информационного блока постоянной амплитуды и частоты (≈20 кГц) подают в обмотку 28 второго трансформатора, имеющего коэффициент передачи по напряжению, равный 1. С выхода обмотки 15 напряжение питания поступает в выпрямитель 13, формирующий постоянное напряжение для питания АГ 10, 11 и смесителя 12 и подающий это напряжение на соответствующие входы элементов 10, 11, 12.
При отсутствии входной угловой скорости ротор 1 не колеблется относительно ЕДУ 7, 8, и соответственно емкость между ротором 1 и статорной обкладкой ЕДУ 7, 8 не изменяется. Поскольку ЕДУ 7, 8 включены в контуры АГ 10, 11 соответственно, то АГ 10, 11 генерируют сигналы постоянной частоты (f1 в АГ 10, и f2 в АГ 11). Выходные сигналы АГ 10, 11 поступают на вход смесителя 12, формирующего сигнал на частоте f1 - f2 500 кГц. Этот сигнал поступает в обмотку 14 первого трансформатора, а затем с вторичной обмотки 27 на вход ЧД 29 (фиг. 3). Поскольку частота входного сигнала ЧД постоянна (при отсутствии входной угловой скорости), то амплитуда выходного сигнала ЧД также постоянна, а сигналы на выходах ФД 30, 31 равны нулю.
При вращении корпуса ДНГ в инерциальном пространстве с угловыми скоростями  относительно взаимно ортогональных осей Z0 и Y0, неподвижно связанных с корпусом и ортогональных X0, возникают колебания ротора 1 относительно статорных обкладок ЕДУ 7, 8 на частоте Ω (ось Y0 на чертеже не показана). В результате емкость между ротором и статорной обкладкой ЕДУ 7 изменяется по закону
относительно взаимно ортогональных осей Z0 и Y0, неподвижно связанных с корпусом и ортогональных X0, возникают колебания ротора 1 относительно статорных обкладок ЕДУ 7, 8 на частоте Ω (ось Y0 на чертеже не показана). В результате емкость между ротором и статорной обкладкой ЕДУ 7 изменяется по закону
t время;
К1 коэффициент пропорциональности, а емкость между ротором и статорной обкладкой ЕДУ 8 по закону
- ΔC•sin(Ω•t + ϕ) (2)
Изменения емкостей (1), (2) приводят к девиации частот, генерируемых АГ 10, 11 и соответственно к модуляции разности частот на выходе смесителя 12 по закону
K1 коэффициент пропорциональности.
Таким образом, ротор и ЕДУ формируют первичную информацию (амплитудно-модулированный сигнал), преобразователь "девиация емкости код" преобразует первичную информацию в девиацию частоты (Δf) на частоте модуляции Ω с учетом фазы v (причем Df, ϕ функции составляющих  входной угловой скорости), а с выхода обмотки 14 информационного блока через обмотку 27 информация об угловых скоростях
входной угловой скорости), а с выхода обмотки 14 информационного блока через обмотку 27 информация об угловых скоростях  передается на корпус 19.
передается на корпус 19.
С обмотки 27 выходной сигнал поступает на вход ЧД 29, преобразующего девиацию частоты в девиацию амплитуды сигнала
К3 коэффициент пропорциональности.
Выходной сигнал (3) ЧД фазочувствительно выпрямляется в ФД 30, 31 с использованием опорных сигналов с выходов ГОИ 25, 26, в результате с выходов ФД 30, 31 в виде постоянного тока поступает информация об угловых скоростях 
В приведенном примере реализации предлагаемого технического решения преобразователь "девиация емкости код" осуществляет преобразование девиации емкости в девиацию частоты на частоте модуляции Ω с учетом фазы v Возможны и другие варианты реализации преобразователя, например, преобразователь девиации емкости в интервал времени с соответствующим изменением блока обработки информации.
Для обеспечения высокой точности ДНГ и эффективности работы преобразователя в первой ампуле (в среде, окружающей ротор) обеспечивают глубокий вакуум (остаточное давление газа не более 10-3 мм рт. ст.), вторую ампулу заполняют инертным газом с давлением немного более нормального.
Корпус прибора (газодинамическая опора) заполняется осушенным воздухом при нормальном давлении.
Использование: в системах инерциального управления объектами. Сущность: гироскоп содержит корпус, ротор и датчики угла, закрепленные во вращающейся герметичной ампуле, электропривод, высокоскоростные газодинамические опоры, опорные поверхности которых выполнены в корпусе полусферическими, устройство передачи информации от датчиков к корпусу и устройство передачи энергии от корпуса. Подвижные элементы выполнены в виде двух жестко связанных фланцев, каждый с аналогичной опорной поверхности корпуса рабочей поверхностью и с внутренней полостью. Во внутренней полости первого фланца установлена герметичная ампула и преобразователь сигнала датчика угла в код, а во внутреннюю полость второго фланца установлены элементы электропривода. 1 з.п.ф-лы, 3 ил.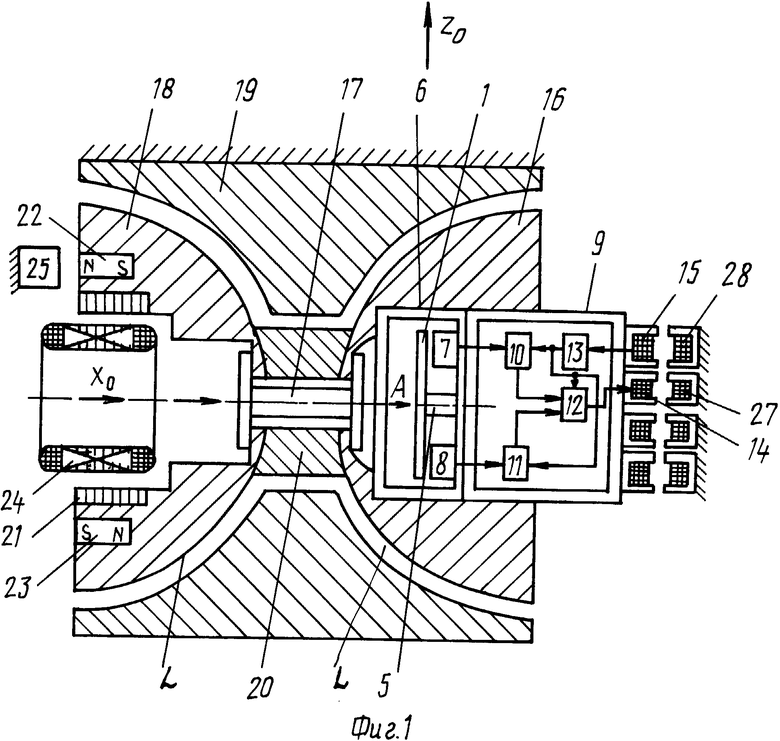
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| FR, патент, 2354534, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| FR, патент, 2059783, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| US, патент, 3394597, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
