Изобретение относится к грузоподъемным устройствам, а именно к ручным лебедкам.
Известна ручная лебедка, содержащая приводной рычаг и храповой механизм, взаимодействующие с барабаном, которые по своей конструкции работают только на подъем груза (см. авт. св. СССР N 434057, кл. В 66 D 1/02, 1974).
Известна ручная лебедка (см. авт. св. СССР N 622753, кл. B 66 D 1/04, 1978), которая по своему устройству является наиболее близкой к предлагаемой и содержит раму с крепежным крюком, на которой установлен канатный барабан, жестко закрепленный на оси, храповое колесо с зубчатым фиксатором и приводной рукояткой, стопорный и реверсивный механизмы.
Недостатком известных лебедок является ненадежность в работе.
Предлагаемое изобретение характеризуется тем, что стопорный и реверсивный механизмы выполнены в виде единого узла, включающего в себя установленное на упомянутой оси дополнительное храповое колесо с анкерным стопором, при этом анкерный стопор снабжен подпружиненными фиксаторами и рукояткой управления, а зубчатый фиксатор основного храпового колеса снабжен хвостовиком с дополнительным фиксатором.
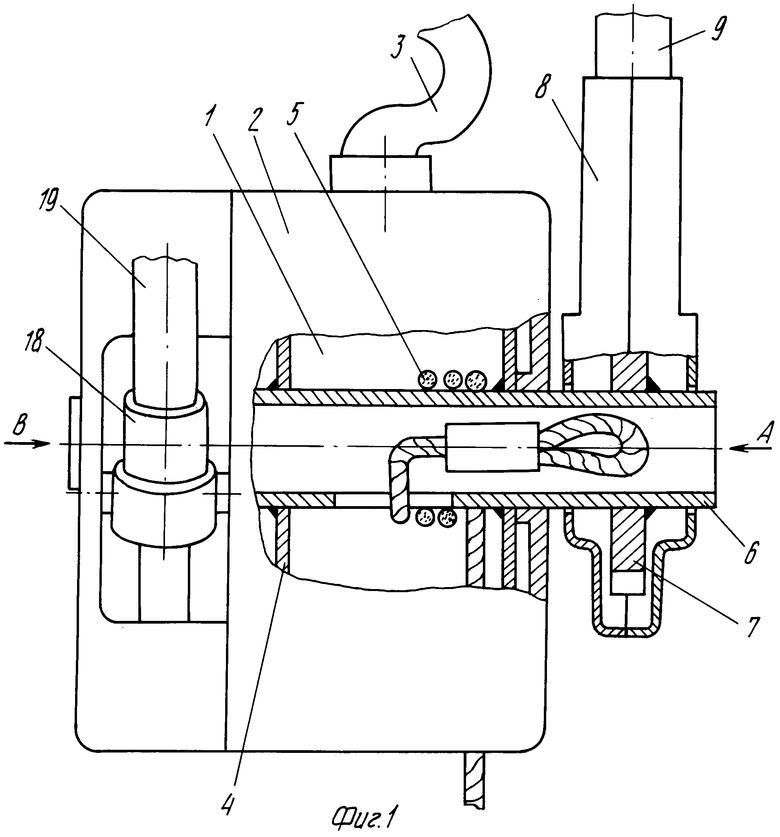
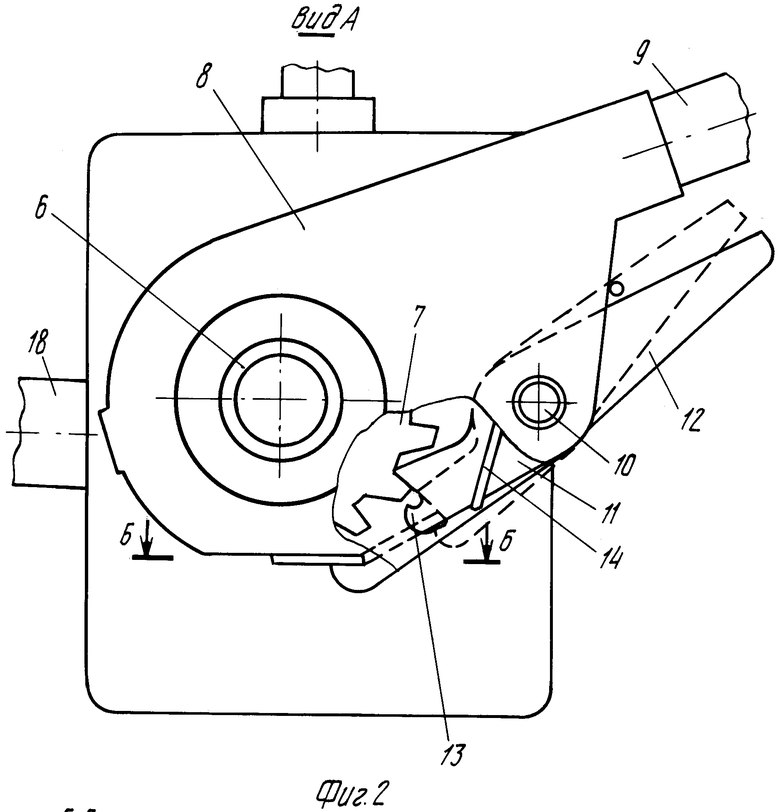
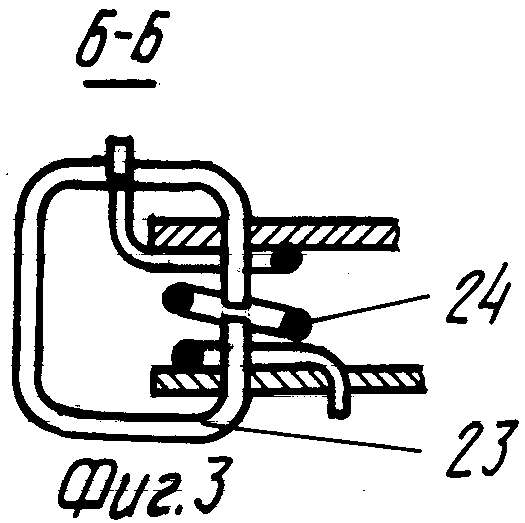
На фиг. 1 изображена предлагаемая лебедка, общий вид; на фиг. 2 вид по стрелке А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 2; на фиг. 4 вид по стрелке В на фиг. 1.
Лебедка 1 включает в себя раму 2 с крюком 3, в опорах которой установлен барабан 4 с намотанным на него тросом 5, на свободном конце которого крепится груз. На оси 6 барабана 4 жестко закреплено храповое колесо 7.
Держатель 8 приводной рукоятки 9 установлен на оси 6 с возможностью относительного вращения. В держателе 8 на оси 10 установлен зубчатый фиксатор 11, выполненный с хвостовиком 12 и захватом 13, который поджимается к храповому колесу 7 пружиной 14.
С другой стороны барабана 4 на оси 6 жестко закреплено храповое колесо 15.
На раме 2 на оси 16 установлен анкерный стопор 17 с возможностью взаимодействия с храповым колесом 15. На оси 16 анкерного стопора 17 неподвижно закреплен держатель 18 рукоятки 19 управления.
В анкерном стопоре 17 жестко закреплен параллельно оси этого стопора палец 20, который взаимодействует с двухпозиционным фиксатором, установленным на раме 2 и состоящим из пружины 21 и закрепленного в ней свободно вращающегося шарика 22, который обкатывается вокруг пальца 20.
В держателе 8 применено устройство закрепления положения зубчатого фиксатора 11, выполненное в виде скобы 23 с пружиной 24.
Лебедка работает следующим образом.
Крюк 3 крепится к неподвижному предмету, а к свободному концу троса 5 крепится груз.
Для подъема или подтягивания груза поворотом рукоятки 9 поворачивают храповое колесо 7 на некоторый угол, при этом анкерный стопор 17 выходит из зацепления с храповым колесом, откатывается по нему и стопорит в другом положении посредством пружины 21 и шарика 22, который, обкатываясь вокруг пальца 20, перебрасывает анкерный стопор.
Последовательно совершая возвратно-поступательное движение приводной рукояткой 9 повторяют поворот храпового колеса 7 и тем самым поднимают груз на необходимую высоту.
Перед опусканием груза нажатием на хвостовик 12 фиксатор 11 выводится из зацепления с храповым колесом 7 и закрепляется в этом положении поворачивающейся скобой 23 посредством ее разворота и ввода в захват 13 зубчатого фиксатора 11.
Нажатием на рукоятку 19 управления возвратно-поступательными движениями необходимо придать колебательные движения анкерному стопору 17, который будет поочередно входить в зацепление с храповым колесом 15 то одним зубом с его внешней стороны, то другим зубом с его внутренней стороны. В результате после каждого колебательного движения анкерный стопор 17 будет опускаться на линейную величину, равную шагу храпового колеса 15.
Для переключения лебедки на подъем груза разовым нажатием на хвостовики 12 фиксатора 11 автоматически освобождает его от фиксирующей скобы 23, которая за счет пружины 24 переводится в противоположное положение.
Рукоятки 9 и 19 могут быть взаимозаменяемыми, т.е. рукоятка может быть переставной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная лебедка | 1977 |
|
SU622753A2 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| РУЧНАЯ ЛЕБЕДКА | 1991 |
|
RU2020124C1 |
| МЕХАНИЧЕСКАЯ ЛЕБЕДКА | 1992 |
|
RU2047553C1 |
| РУЧНАЯ ЛЕБЕДКА | 1993 |
|
RU2045469C1 |
| СПОСОБ РАБОТЫ ГРУЗОВОЙ ТЯГОВОЙ ЛЕБЕДКИ И ГРУЗОВАЯ ТЯГОВАЯ ЛЕБЕДКА | 2016 |
|
RU2630266C1 |
| МОСТОВАЯ КОНСТРУКЦИЯ И МОСТОСБОРОЧНАЯ МАШИНА ДЛЯ ТРАНСПОРТИРОВКИ, СБОРКИ И УКЛАДКИ НА ПРЕГРАДУ МОСТОВОЙ КОНСТРУКЦИИ | 2001 |
|
RU2210656C2 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ ИНДИВИДУАЛЬНОГО СТРОИТЕЛЬСТВА | 1996 |
|
RU2092430C1 |
| Лебедка | 1990 |
|
SU1730016A1 |
| Ручная лебедка | 1978 |
|
SU812703A1 |
Использование: в грузоподъемных устройствах. Ручная лебедка содержит раму с крепежным крюком, на которой установлен канатный барабан, жестко закрепленный на оси 6, храповое колесо с зубчатым фиксатором 11 и приводной рукояткой, стопорный механизм и устройство для реверсирования, причем стопорный и реверсивный механизмы выполнены в виде единого узла и содержат жестко укрепленное на оси 6 храповое колесо 15 с анкерным стопором 17, который снабжен двухпозиционным подпружиненным фиксатором, установленным на раме и состоящим из пружины 21 и закрепленного в ней свободно вращающегося шарика 22, обкатывающегося вокруг пальца 20, и рукояткой 19 управления, а зубчатый фиксатор 11 основного храпового колеса, также жестко связанного с осью 6, снабжен хвостовиком для ручного выведения стопора из зацепления и фиксатором этого положения, выполненным в виде скобы с пружиной. 4 ил.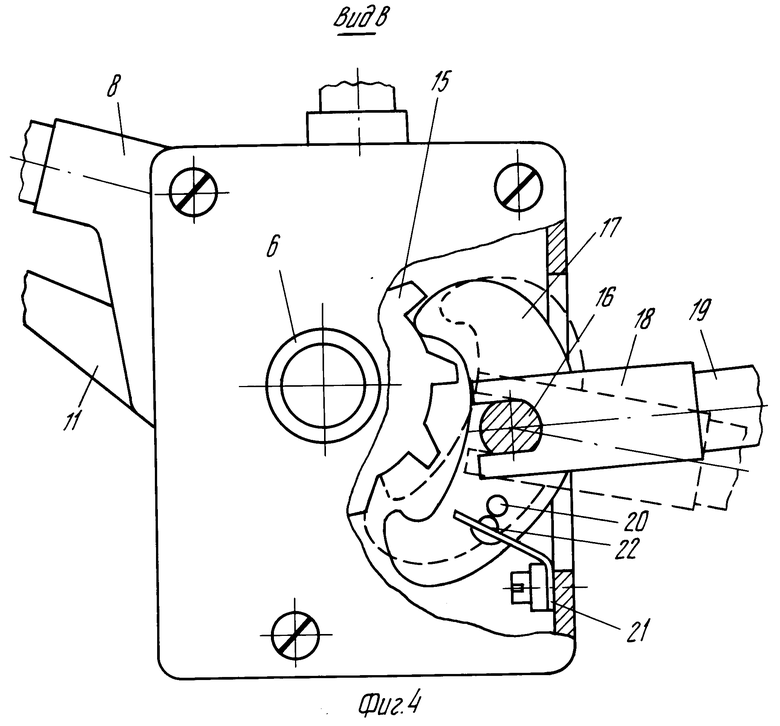
РУЧНАЯ ЛЕБЕДКА, содержащая раму с крепежным крюком, установленные на оси, закрепленной на раме, барабан, храповое колесо с зубчатым фиксатором и приводной рукояткой, стопорный и реверсивный механизмы, отличающаяся тем, что стопорный и реверсивный механизмы выполнены в виде единого узла, включающего в себя установленное на упомянутой оси дополнительное храповое колесо с анкерным стопором, при этом анкерный стопор снабжен подпружиненным фиксатором и рукояткой управления, а зубчатый фиксатор основного храпового колеса снабжен хвостовиком с дополнительным фиксатором.
| Ручная лебедка | 1977 |
|
SU622753A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
