Изобретение относится к грузоподъемным и тяговым средствам, преимущественно к ручным лебедкам.
Известна ручная лебедка, содержащая барабан, раму, шестерню, связанную с ней ведущую шестерню, храповое колесо, собачку с пружиной и рукоятку.
Недостатком данной лебедки является сложность конструкции и низкое быстродействие, т.е. медленное перемещение груза.
Наиболее близким техническим решением является ручная лебедка, содержащая корпус, установленный в нем барабан с храповым механизмом и ручной привод барабана в виде вильчатой рукоятки и стопорного фиксатора.
Такая лебедка имеет следующие недостатки при опускании груза: требуется большое усилие на рукоятке, так как рукояткой необходимо удерживать полный вес груза; необходимость одновременного перемещения рукоятки и управления фиксаторами, что практически невозможно обеспечить одному человеку.
Целью изобретения является обеспечение опускания груза с небольшим усилием и при этом без ручного управления фиксаторами, т.е. возможность обслуживания лебедки одним человеком как при подъеме, так и при опускании груза.
Предлагаемая лебедка снабжена механизмом спуска, включающим в себя жестко закрепленный на вильчатой рукоятке кулачок и палец, жестко связанный с упомянутым стопорным фиксатором и установленный с возможностью взаимодействия с указанным кулачком.
В лебедке профиль кулачка может быть выполнен с двумя рабочими участками прямолинейной формы, одинаково наклоненными к оси стопорного фиксатора при контакте с ним.
На фиг.1 изображена схема предлагаемой ручной лебедки в исходном положении вильчатого рычага-рукоятки, когда один из рабочих участков профиля кулачка соприкасается с пальцем стопорного фиксатора; на фиг.2 ручная лебедка в положении вильчатого рычага-рукоятки в конце хода при упоре его в корпус, когда другой участок профиля кулачка соприкасается с пальцем стопорного фиксатора.
Ручная лебедка содержит барабан с храповым колесом 1, установленным на оси в корпусе 2, в котором размещены пружина 3 и стопорный фиксатор 4, перемещаемый вдоль своей оси через палец 5 кулачком 6, жестко закрепленным на вильчатой рукоятке 7, установленной на оси барабана 1. Кроме того, рукоятка 7 при помощи приводного фиксатора 8 и пружины 9, встроенных в эту рукоятку, взаимодействует с храповым колесом барабана 1.
Ручная лебедка работает следующим образом.
Для подъема и перемещения груза необходимо повернуть рукоятку 7 по часовой стрелке до упора в корпус 2. В это время приводной фиксатор 8 под действием пружины 9 замкнет рукоятку 7 через храповое колесо с барабаном 1, которое повернется на тот же угол, что и рукоятка 7, и переместит груз на определенную величину. Для дальнейшего подъема груза необходимо возвратить рукоятку 7 до упора кулачка 6 в палец 5 стопорного фиксатора 4, т.е. в исходное положение рукоятки 7, а в это время груз удерживается стопорным фиксатором 4. Затем рукоятку 7 снова необходимо повернуть по часовой стрелке до упора в корпус 2, и так повторять до тех пор, пока груз не будет поднят на необходимую высоту.
Для опускания груза необходимо приводной фиксатор 8 вывести из зацепления с храповым колесом барабана 1 и зафиксировать его в этом положении. Затем повернуть рукоятку 7 из исходного положения против часовой стрелки до упора в корпус 2, как показано на фиг.2. В результате этого кулачок 6 нажмет на палец 5 стопорного фиксатора 4 и выведет его из зацепления с храповым колесом барабана 1 и снова освободит палец 5, а пружина 3 возвратит стопорный фиксатор 4 в зацепление с храповым колесом барабана 1, который под действием груза успеет повернуться на один шаг храпового колеса. При возвращении рукоятки 7 в исходное положение снова произойдет взаимодействие всех звеньев механизма спуска, а барабан повернется еще на один шаг храпового колеса. Повторяя качательные движения рукоятки 7, можно опустить груз на требуемую величину. При этом благодаря одинаковым углам наклона рабочих участков профиля кулачка к оси стопорного фиксатора 4 во время контакта с ним обеспечиваются равные усилия на рукоятке 7 как в одну, так и в другую сторону.
Применение предлагаемой ручной лебедки позволит обеспечить возможность работать с ней одному человеку, сократить в несколько раз время пуска груза и при этом значительно снизить усилие на рукоятке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКВАЖИННЫЙ ШТАНГОВЫЙ НАСОС | 1992 |
|
RU2035621C1 |
| Массажный стол | 1991 |
|
SU1805941A3 |
| Ручная лебедка | 1977 |
|
SU743945A1 |
| Портативная лебедка с ручным приводом | 1977 |
|
SU742364A1 |
| Ручная лебедка | 1980 |
|
SU919979A1 |
| МЕХАНИЧЕСКАЯ ЛЕБЕДКА | 1992 |
|
RU2047553C1 |
| РУЧНАЯ ЛЕБЕДКА | 1991 |
|
RU2042604C1 |
| Ручная лебедка | 1989 |
|
SU1698178A1 |
| Устройство для прокручивания рабочих органов зерноуборочного комбайна | 1981 |
|
SU1012836A2 |
| Ручная лебедка | 1990 |
|
SU1744053A1 |
Использование: в грузоподъемных и тяговых средствах. Сущность изобретения: ручная лебедка содержит корпус 2, барабан 1, храповой механизм ручного привода барабана с вильчатой рукояткой 7 и стопорным фиксатором. Ручная лебедка снабжена механизмом спуска, содержащим кулачок 6, жестко закрепленный на вильчатой рукоятке 7, контактирующий со стопорным фиксатором, через палец жестко связанный с этим фиксатором. При этом профиль кулачка 6 может быть выполнен с двумя рабочими участками прямолинейной формы, одинаково наклоненными к оси стопорного фиксатора при контакте с ним. 1 з. п. ф-лы, 2 ил.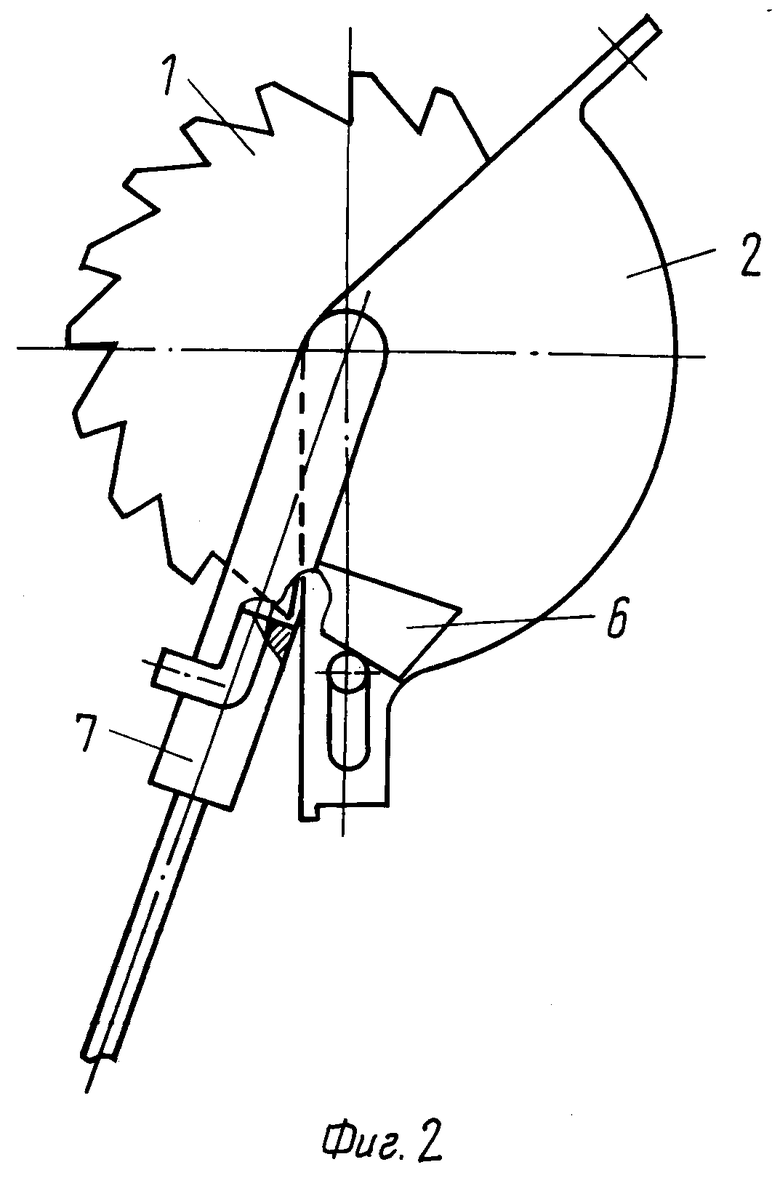
| Рычажная канатная лебедка | 1984 |
|
SU1221200A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
