Изобретение относится к машиностроению и может быть использовано в двигателях внутреннего сгорания и пневматических устройствах с неравномерным движением рабочих органов, в механизмах для передачи усилий на вращательное движение, преимущественно в мускульных приводах.
Известен четырехзвенный шарнирный кривошипно-коромысловый механизм, содержащий стойку и размещенные на ней кривошип, шатун и коромысло.
Недостатком известного механизма является низкий КПД (эффективность) передачи сил на вращательное движение по причине не выполнения механизма с определенными параметрами.
Техническим результатом изобретения является повышение КПД.
Это достигается тем, что четырехзвенный шарнирный кривошипно-коромысловый механизм выполнен с длиной шатуна и коромысла меньше 9,0 длин кривошипа и расстоянием между осями соединения кривошипа и коромысла к стойке меньше 6,0 длин кривошипа.
Увеличение КПД (эффективности) четырехзвенного шарнирного кривошипно-коромыслового механизма при передаче сил F на вращательное движение характеризуется моментом М на оси λ кривошипа и определяется углом давления ϕ по фиг.1. Посредством углов давления определяется сумма моментов сил на оси А;
Mi= F·r·cosϕ n1= 1, 2, 3; где Mi сумма моментов на оси;
F·r·cosϕ n1= 1, 2, 3; где Mi сумма моментов на оси;
F сила действующая вдоль шатуна;
r длина кривошипа;
ϕ угол давления;
Механизм содержит стойку 1, кривошип 2, шатун 3 и коромысло 4. Поставленная задача, повышения КПД (эффективности) решается определением зависимостей величин моментов на оси А от длин звеньев четырехзвенного шарнирного кривошипно-коромыслового механизма, стойки 1, кривошипа 2, шатуна 3, коромысла 4. Принимается угол Ψ независимый параметр, ϕ- функция. Задача сводится ϕ(Ψ) функция положения. По теореме косинусов из Δ АВД иΔ ДВС после преобразований определяем ϕ1 и ϕ2
ϕ1 arccos a; ϕ2= arccos K где a  K
K  после введения безразмерных относительных величин δ
после введения безразмерных относительных величин δ  P
P  λ
λ  возможны два случая
возможны два случая
1. ϕ1+ϕ2=  + ϕ Δ
+ ϕ Δ
2. ϕ1+ϕ2=  ϕ Δ
ϕ Δ
Δ arccos a·k-
a·k- 
Для упрощения анализа моментов принимается F 1, r 1,
тогда M  sinΔ(Ψ)dΨ
sinΔ(Ψ)dΨ
При условии l  R или λ
R или λ  р обеспечивается равномерное перемещение точек В и С в соответствующих прямом и обратном направлениях, а также достигается максимальный результат по моменту, где
р обеспечивается равномерное перемещение точек В и С в соответствующих прямом и обратном направлениях, а также достигается максимальный результат по моменту, где
Δ arccos 
 1-δcosΨ-δsinΨ
1-δcosΨ-δsinΨ 
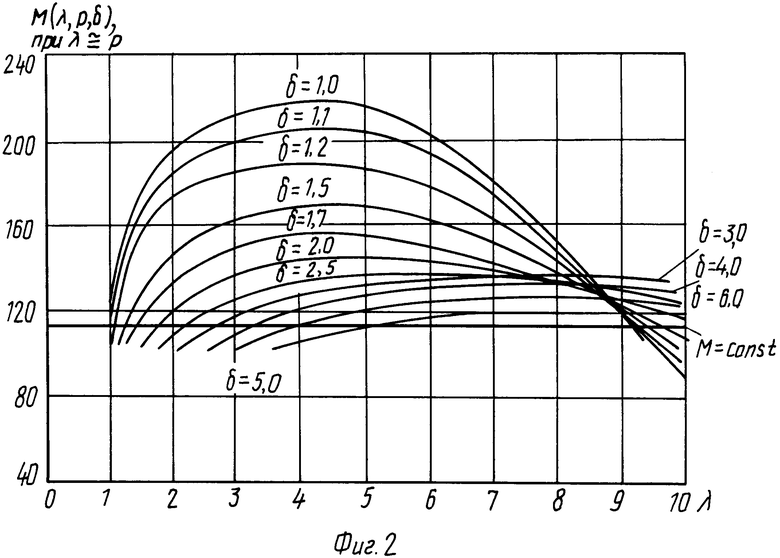
Расчетами получены величины суммарных моментов в зависимости от параметров (относительных величин звеньев) четырехзвенников). Данные расчетов приведены на графике (фиг.2) зависимостей М ( λ,P,δ) при условии  p в области существования, проворачиваемого кривошипа. Расчеты единичных моментов произведены с точностью до четвертого знака. Предельные значения углов положения Ψ1 и Ψ2 определены, как
p в области существования, проворачиваемого кривошипа. Расчеты единичных моментов произведены с точностью до четвертого знака. Предельные значения углов положения Ψ1 и Ψ2 определены, как
Ψ1= arccos m;
Ψ2 arccos n; где m 
n  для каждого значения параметров. Для сравнения приведен единичный момент кривошипного, кривошипно-ползунного, известного шарнирного кривошипно-коромыслового четырехзвенного механизма и др. который равен 114,588. Момент вышеназванных механизмов не зависит от величин звеньев и равен константе при действии силы, равной единице, и кривошипе, равном единице. Значение М 114,588 получено с достаточной степенью точности для практического примечания. В доступной литературе (по механике, физике и др.) не приходилось встречать вышеназванную постоянную. Константа 114,588 имеет размерность произведения длины на силу и характеризует вращательный эффект силы при силе, равной единице, и (плече) кривошипе, равном единице, для механизмов, содержащих кривошип.
для каждого значения параметров. Для сравнения приведен единичный момент кривошипного, кривошипно-ползунного, известного шарнирного кривошипно-коромыслового четырехзвенного механизма и др. который равен 114,588. Момент вышеназванных механизмов не зависит от величин звеньев и равен константе при действии силы, равной единице, и кривошипе, равном единице. Значение М 114,588 получено с достаточной степенью точности для практического примечания. В доступной литературе (по механике, физике и др.) не приходилось встречать вышеназванную постоянную. Константа 114,588 имеет размерность произведения длины на силу и характеризует вращательный эффект силы при силе, равной единице, и (плече) кривошипе, равном единице, для механизмов, содержащих кривошип.
На фиг. 1 изображена кинематическая схема четырехзвенного шарнирного кривошипно-коромыслового механизма.
Он содержит стойку 1, размещенные на ней кривошип 2, шатун 3 и коромысло 4 в трех положениях. В начальном положении Cl Ψ1, в произвольном положении С1 Ψ, и в конечном положении С2, Ψ2.
На фиг.2 изображены значения суммарных единичных моментов в зависимости от параметров четырехзвенных шарнирных кривошипно-коромысловых механизмов. Кривая δ= 1,0 является наибольшей по суммарному моменту. Кривая δ 6,0 является наименьшей по суммарному моменту, т.е. она близко прилегает к горизонтальной прямой М( λ,p,δ) 114,588, которая отображает суммарный единичный момент известных механизм (кривошипного, кривошипно-ползунного и известного четырехзвенника и др.).
Механизм работает следующим образом. Под действием силы F (фиг.1) происходит перемещение точек С1 и В1 механизма в положение С2 и В2 против часовой стрелки. Соответственно при перемещении кривошипа из первоначального положения Ψ1 в конечное положение Ψ2, происходит рабочий ход или максимальная передача силы F для образования суммарного момента на оси А кривошипа при определенных параметрах механизма. Затем из положения Ψ2 в положение Ψ1 кривошипа происходит обратный ход, также против часовой стрелки, сила F не действует, т.е. точка С2 механизма возвращается в первоначальное положение. Затем этот цикл повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ ЯРИМОВА | 1992 |
|
RU2073803C1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| ДЕЗАКСИАЛЬНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ЯРИМОВА | 2002 |
|
RU2267672C2 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЯРИМОВА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 2001 |
|
RU2202702C2 |
| ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2033366C1 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ ПО МЕХАНИЧЕСКОМУ ЦИКЛУ ЯРИМОВА И ДВИГАТЕЛЬ ЯРИМОВА | 2003 |
|
RU2249709C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 1992 |
|
RU2062893C1 |
| СПОСОБ ВЫПОЛНЕНИЯ РАБОЧЕГО ОБЪЕМА ДВИГАТЕЛЯ (ТЕПЛОВОЙ МАШИНЫ) | 2001 |
|
RU2213873C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 2005 |
|
RU2290520C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2265726C2 |
Изобретение относится к машиностроению и может быть использовано в двигателях внутреннего сгорания и пневматических устройствах с неравномерным движением рабочих органов. Техническим результатом изобретения является повышение КПД. Для достижения этого результата длина шатуна 3 и коромысла 4 меньше в 9,0 раз длины кривошипа 2, а расстояние между осями соединения кривошипа 2 и коромысла 4 к стойке 1 меньше в 6,0 раз длины кривошипа 2. 2 ил.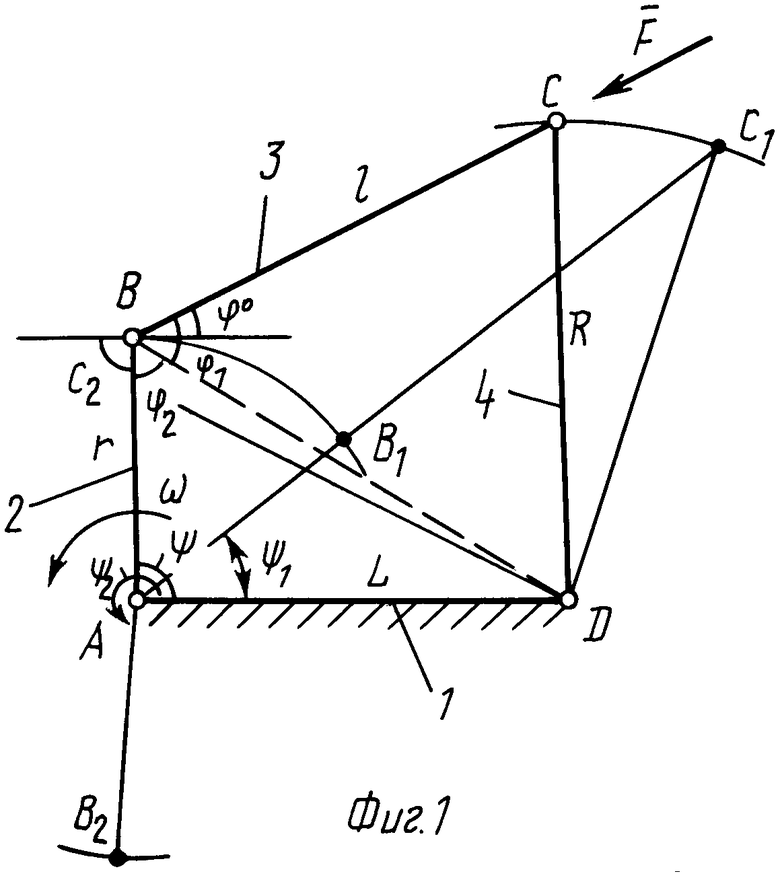
Четырехзвенный шарнирный кривошипно-коромысловый механизм, содержит стойку, размещенные в ней кривошипы, шатун и коромысло, отличающийся тем, что длина шатуна и коромысла меньше 9 длин кривошипа, а расстояние между осями соединения кривошипа и коромысла к стойке меньше 6 длин кривошипа.
| И.И | |||
| Артоболевский, Механизмы в современной технике, т.1 ст.257, механизм 509, 1979, |
