Изобретения относятся к машиностроению и могут быть использованы в двигателях внутреннего сгорания, тепловых машинах, пневматических устройствах, насосах и гидроагрегатах.
Известен способ построения направляющей кривой цилиндрической поверхности ротора или корпуса, заключающийся в том, что ее построение осуществляют в системе координат Х и Y и обкатывают без скольжения производящую окружность по неподвижной окружности (I). Известен способ построения направляющей кривой цилиндрической поверхности ротора или корпуса, заключающийся в том, что в системе координат Х и Y производящую окружность обкатывают без скольжения по неподвижной окружности, одновременно с производящей окружностью жестко закрепляют кривошип четырехзвенного шарнирного кривошипно-коромыслового механизма, так, что точки кривошипа описывают эпитрохоиды или гипотрохоиды, а несимметричную относительно оси Y системы координат направляющую кривую описывают точкой, расположенной на конце дуги-траектории одной из точек коромысла четырехзвенного шарнирного кривошипно-коромыслового механизма, энергетический параметр которого
A(λ, ρ, ξ)≠2,
где А - энергетический параметр механизма,
λ - относительная величина шатуна четырехзвенника,
ρ - относительная величина коромысла четырехзвенника,
δ - относительная величина стойки четырехзвенника (2).
Недостатками известных способов построения направляющей кривой цилиндрической поверхности ротора или корпуса является то, что они сложны по конструкции и имеют ограниченные возможности конструктивного исполнения при приеме и передаче максимальных значений энергии термодинамических процессов на вращательное движение.
Задачей изобретения является упрощение конструкций и расширение конструктивных возможностей устройств при сохранении повышенного КПД устройств.
Технический результат достигается тем, что цилиндрическая поверхность ротора или корпуса с направляющей кривой, построенной по предлагаемому способу, сохраняет уникальные свойства по (2) и решает поставленную задачу.
Основой достигаемого технического результата является:
Вариант первый. Cпособ построения направляющей кривой цилиндрической поверхности ротора или корпуса, заключающийся в том, что в системе координат Х и Y производящую окружность обкатывают без скольжения по неподвижной окружности так же, но с производящей окружностью жестко закрепляют кривошип кривошипно-ползунного механизма с осью направляющей, не проходящей через ось вращения кривошипа, что равносильно тому, что берут кривошипно-ползунный механизм с осью направляющей, не проходящей через ось вращения кривошипа, а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек ползуна этого кривошипно-ползунного механизма с энергетическим параметром
A(λ, ξ)≠2,
где А - энергетический параметр механизма;
λ - относительная величина шатуна механизма;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа,
при этом точки направляющей кривой определяют следующими уравнениями:
где Х и Y - оси декартовых координат;
R0 - радиус неподвижной окружности;
r0 - радиус производящей окружности;
ϕ - угол поворота вращения луча, проходящего через центр вращения производящей окружности и осью Х;
r - длина кривошипа;
l -длина шатуна;
ϕ(λ, ξ) - угол между осью Х и шатуном;
λ - относительная величина шатуна;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа;
d - расстояние от точки направляющей кривой до центра шарнира соединения шатуна и ползуна,
или берут любой механизм, содержащий кривошип, с различным ходом по углу поворота кривошипа и с энергетическим параметром:
A(λi, ρi,...)≠2,
где А - энергетический параметр механизма;
λi, ρi,... - относительные величины звеньев механизма, обеспечивающие различие ходов по углу поворота кривошипа, а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек одного из звеньев этого механизма, при этом точки направляющей кривой определяют следующими уравнениями:
где li - длина одного из звеньев механизма, связанного с кривошипом;
ϕ(λiρi,...)i - угол между осью Х и одним из звеньев, свчзанных с кривошипом, в зависимости от параметров механизма, обеспечивающих различие ходов по углу поворота кривошипа;
di+n - расстояние от предыдущей точки до точки направляющей кривой;
ϕn - угол между осью Х и величиной расстояния между точкой направляющей кривой и предыдущей точкой отсчета.
Под предыдущей точкой отсчета подразумевается предыдущий центр соединения одного из звеньев механизма в шарнире или без шарнира. В механизмах, содержащих кривошип, где обеспечиваются различие ходов по углу поворота кривошипа, в зависимости от параметров этого механизма или относительных величин звеньев, обеспечивается различие скоростей прямого и обратного ходов точек одного из звеньев.
Энергетический параметр механизмов обозначает работу сил, передаваемых на вращательное движение, в содержащих кривошип механизмах при силе, равной единице, и длине кривошипа, равной единице. К примеру, для кривошипно-ползунного механизма при A(λ, ξ) = 2 = const, происходит симметричный прямой и обратный ход по углу поворота кривошипа.
По фиг.1 в кривошипно-ползунном механизме: r - длина кривошипа, l - длина шатуна, a - расстояние от оси направляющей ползуна до центра оси вращения кривошипа или нецентральность механизма. Относительные величины звеньев λ= l/r - шатуна, a/r=ξ - нецентральности, получены разделением величины звена на длину кривошипа.
Точки направляющей кривой определяются уравнениями по фиг.1, где первые слагаемые представляют собой эпитрохоиду или гипотрохоиду в зависимости от знака "плюс" или минус". Значение угла γ = ϕ(λ, ξ) между осью Х и шатуном выводится из треугольника  и
и  и равен γ = (ϕ-β). Где угол β между шатуном и осью направляющей ползуна. После замены угла β через угол ψ, затем через угол ϕ получим с подстановкой относительных параметров кривошипно-ползунного механизма
и равен γ = (ϕ-β). Где угол β между шатуном и осью направляющей ползуна. После замены угла β через угол ψ, затем через угол ϕ получим с подстановкой относительных параметров кривошипно-ползунного механизма

Несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек Е ползуна, к примеру на фиг.1, прямая, соединяющая центр оси крепления шатуна и ползуна с точкой Е, расположена под углом α к оси направляющей ползуна. Проекция на ось направляющей ползуна, расстояния от точки направляющей кривой до центра оси шарнира, соединяющего шатун с ползуном, равна d=BEcosα.
Анализируя уравнения криволинейной направляющей, можно сделать вывод, что ее вид зависит от значений параметров нецентрального кривошипно-ползунного механизма и от отношения радиусов неподвижной и производящей окружностей.
Для нецентрального кривошипно-ползунного механизма энергетический параметр равен A(λ, ξ)≠2 и зависит от относительной величины шатуна и отношения расстояния от оси направляющей ползуна до центра оси вращения кривошипа к длине кривошипа. Энергетические параметры нецентральных кривошипно-ползунных механизмов, как и любых механизмов с различными ходами по углу поворота кривошипа, получаются в результате интегрирования суммарных единичных моментов при силе, равной единице, и длине кривошипа, равной единице, аналогично энергетическим параметрам шарнирных четырехзвенников по патентам России 2073803, опубл. 20.02.97, и 2043550, опубл. 10.09.95 по кл. F 16 Н 21/00.
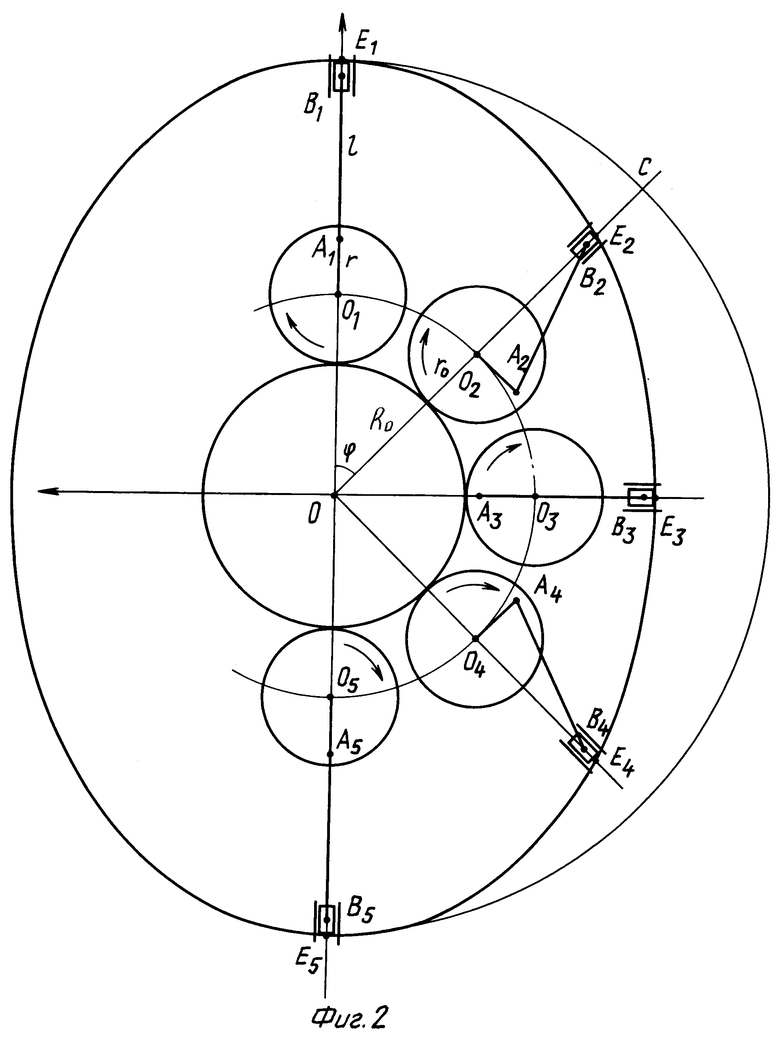
На фиг.2 показана симметричная направляющая кривая, которая описывается центральным кривошипно-ползунным механизмом при отношении радиусов неподвижной и производящей окружностей эпитрохоиды, равном двум с параметрами механизма λ=2,6; ξ=0. Данная кривая имеет форму эллипса и приведена для наглядного сравнения с последующими несимметричными направляющими кривыми.
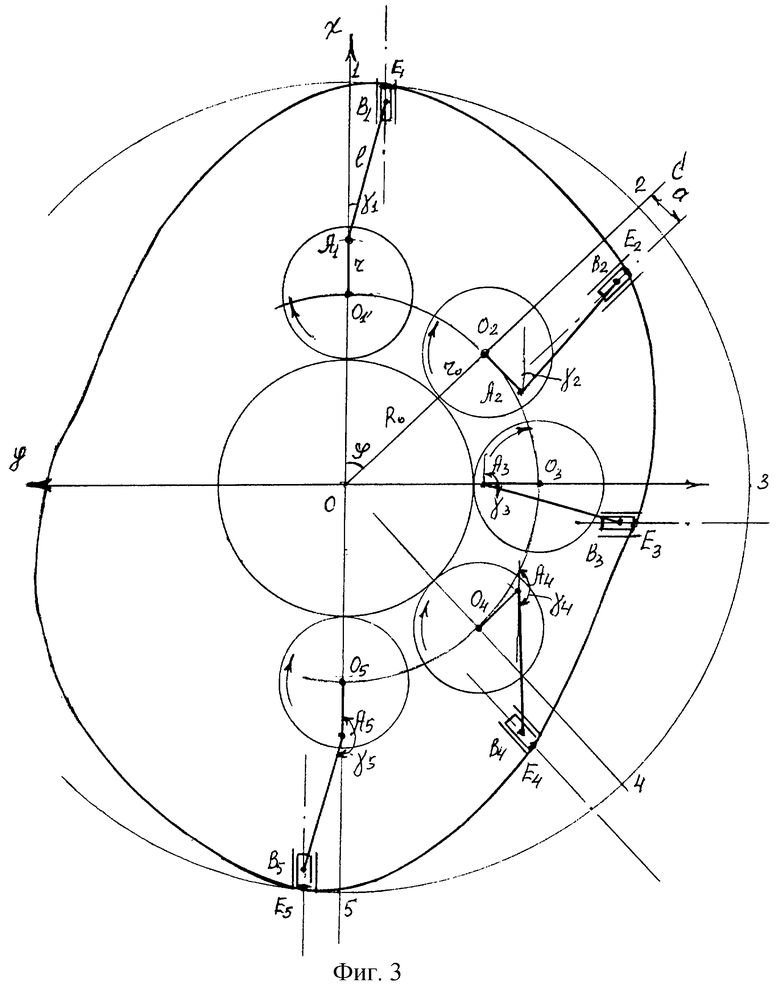
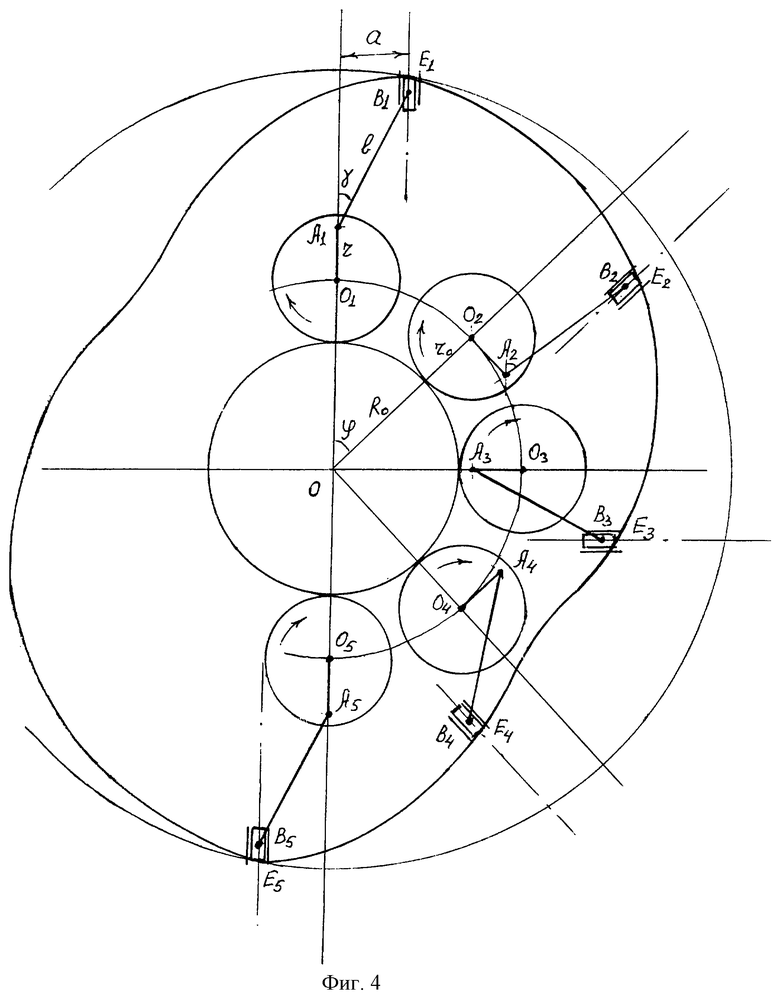
На фиг.3 приведена несимметричная направляющая кривая, описанная крайней точкой ползуна нецентрального кривошипно-ползунного механизма с параметрами λ= 2,6 и ξ= 0,7, а на фиг.4 показана направляющая кривая, описанная той же точкой ползуна нецентрального кривошипно-ползунного механизма с параметрами λ=2,6 и ξ=1,4 с отношениями радиусов окружностей, равными двум.
Свойства цилиндрической поверхности ротора или корпуса с направляющей кривой по предлагаемому автором способу построения:
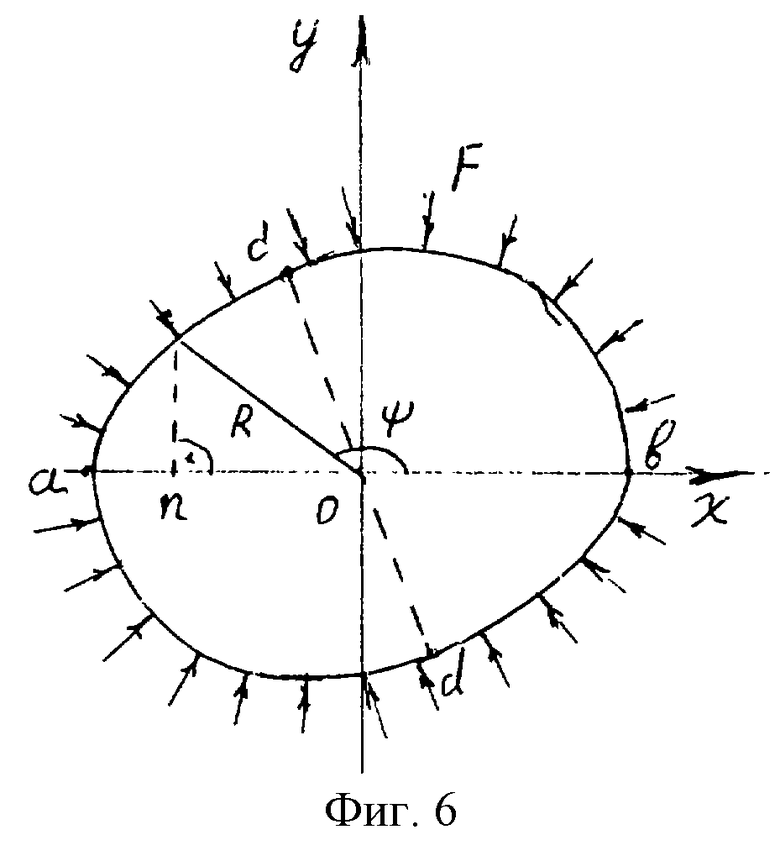
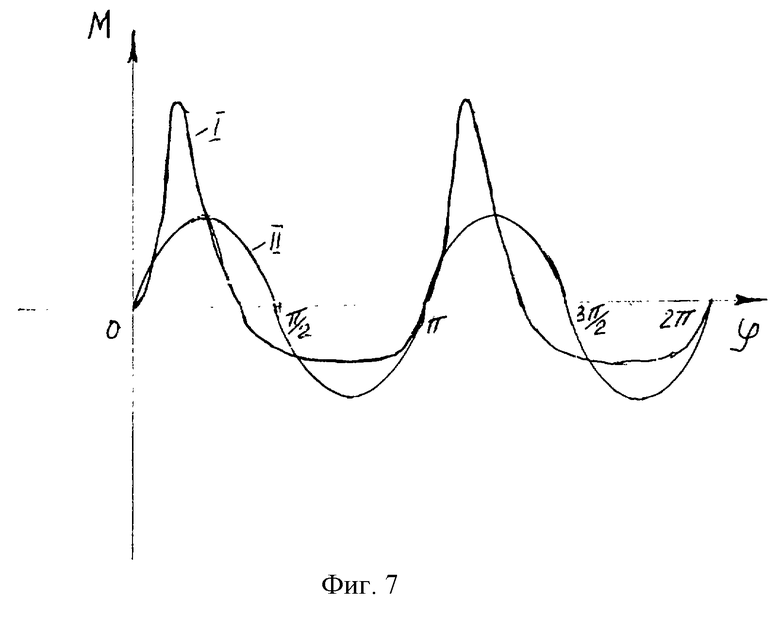
1. Передавать или воспринимать распределенные силы по цилиндрической поверхности, по несимметричной механической характеристике фиг.5-7 или собственной механической характеристике. Для каждого соотношения параметров нецентрального кривошипно-ползунного механизма, к примеру, имеет место своя собственная несимметричная механическая характеристика, с соответствующей кривой направляющей.
2. В зависимости от параметров нецентрального кривошипно-ползунного, к примеру, механизма амплитуды собственных механических характеристик имеют свойство смещаться влево или вправо от оси симметрии, что обеспечит широкий подбор прилагаемых усилий в устройствах с предлагаемой схемой построения формы поверхности ротора или корпуса.
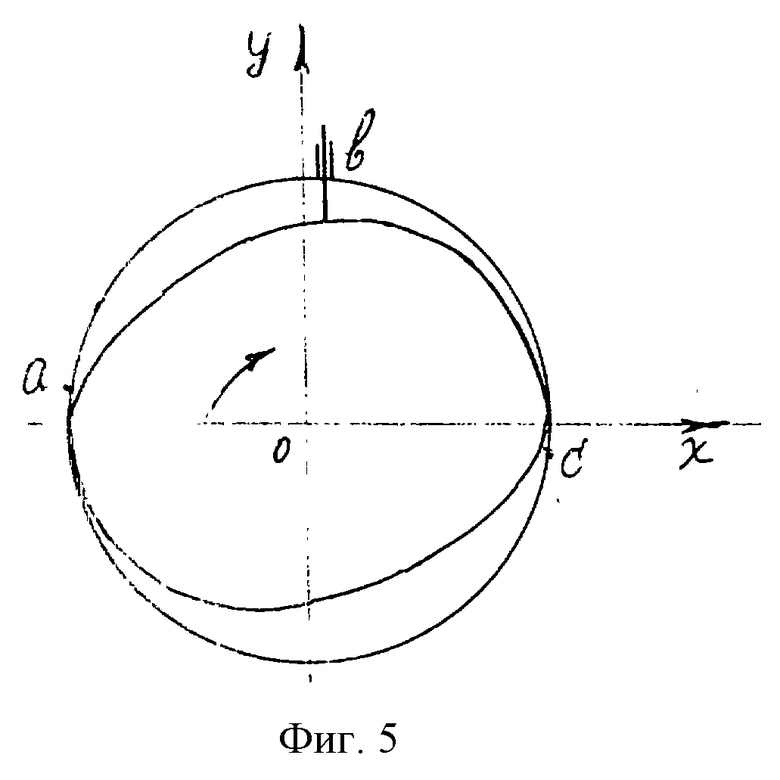
3. Возможность образования с касающейся круговой цилиндрической поверхностью изменяемых несимметричных объемов относительно половины периода. При рассмотрении фиг. 5 в периоде длины дуги заключен несимметричный объем аbс, относительно половины, ползун является чертой симметрии.
4. Возможность изменения рабочего объема, по пункту 3, посредством плоскости, соединенной с одной из точек ползуна нецентрального кривошипно-ползунного, к примеру, механизма, по степенной зависимости, что обеспечивает работу тепловых машин по циклу Яримова (3).
5. Цилиндрическая поверхность ротора с направляющей кривой по предлагаемому автором способу построения, с учетом четырех вышеизложенных свойств, имеет свойство передавать оптимальным образом энергию термодинамических процессов или сил давления расширяющихся газов непосредственно на выходной вал ДВС, т.е. без механического преломления.
6. Двигатель внутреннего сгорания, в котором будет применен ротор или корпус с цилиндрической поверхностью с направляющей кривой по предлагаемому автором способу построения, имеет существенный термический КПД.
При рассмотрении альтернативного признака необходимо отметить, что любой механизм, содержащий кривошип, где происходит несимметричный прямой и обратный ход по углу поворота кривошипа, вследствие чего точки последующих звеньев имеют различные скорости перемещения, соответствующие прямому и обратному их ходам, можно использовать для описания несимметричной направляющей кривой по способу, предложенному автором, для цилиндрической поверхности ротора или корпуса устройств. Наиболее приемлемые по простоте необходимо привести в качестве примера (4) четырехзвенный кулисный механизм с подвешенной кулисой 894, четырехзвенный кулисный механизм с круговой направляющей 914, трехзвенный кулисный механизм с остановкой 1279, кривошипно-ползунный механизм с круговой направляющей 1421. Особый интерес представляют механизмы, отождествленные с шарнирными кривошипно-коромысловыми четырехзвенниками, к примеру вышеупомянутые 914 и 1421, где вместо круговой направляющей необходимо применить приемлемую криволинейную направляющую с малыми углами давления, исключающими заклинивание механизма с одновременным улучшением собственной механической характеристикой ротора или корпуса с предлагаемой цилиндрической поверхностью с направляющей кривой по способу построения автора.
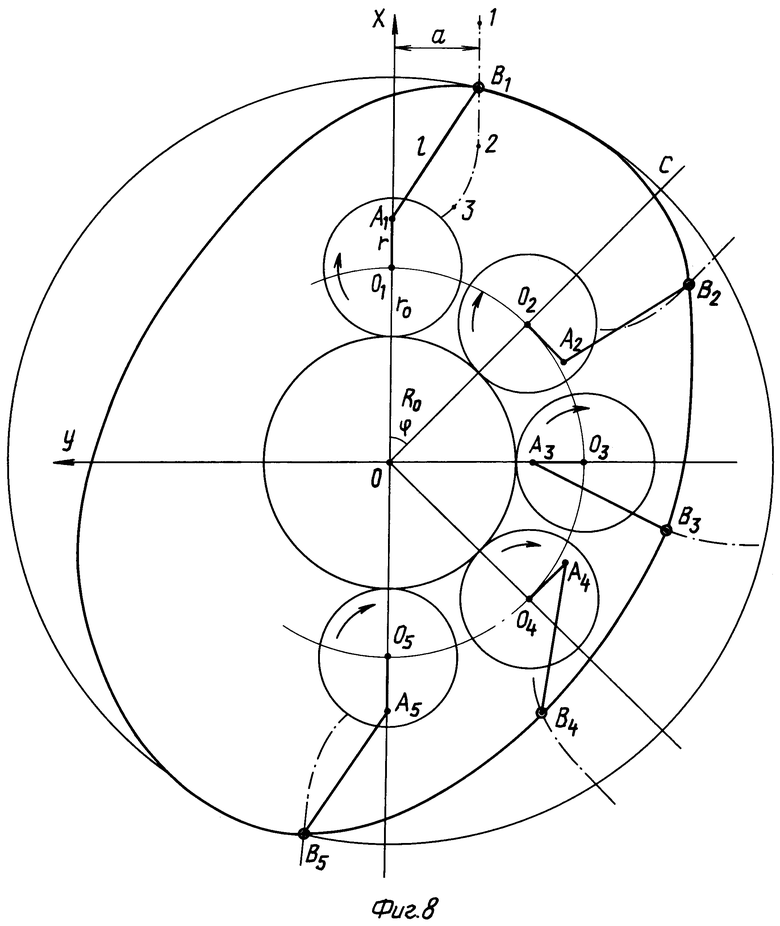
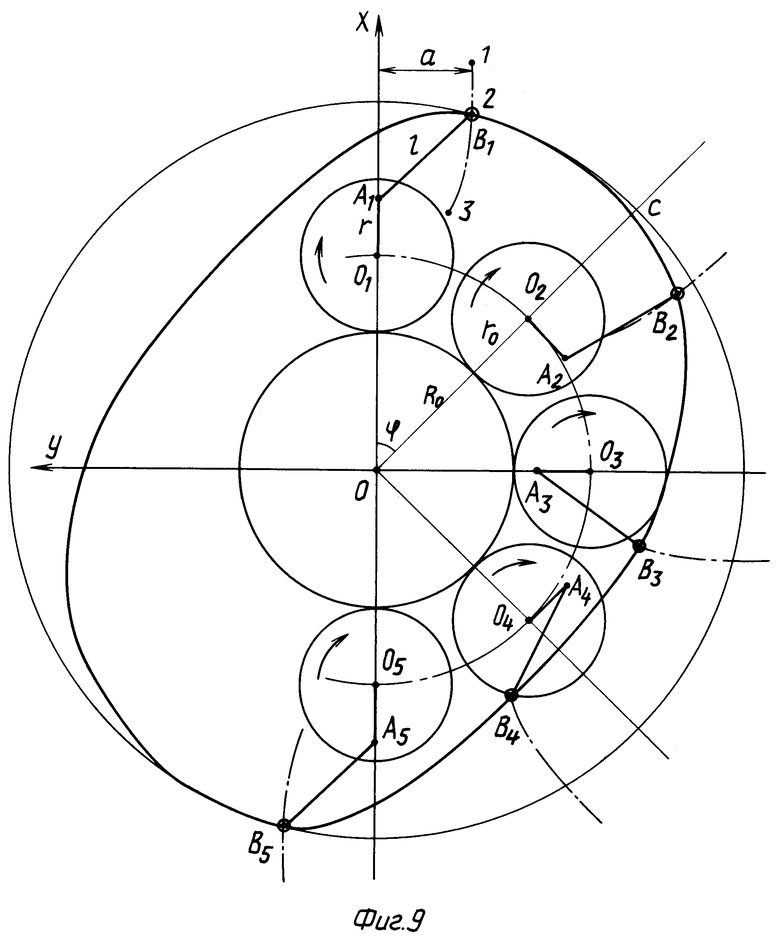
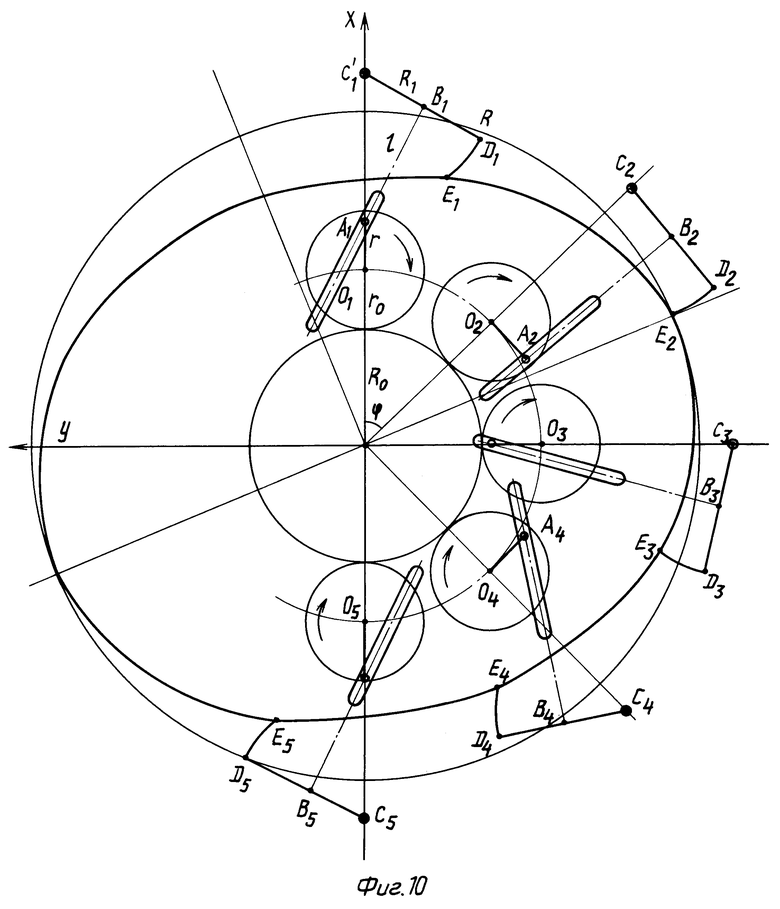
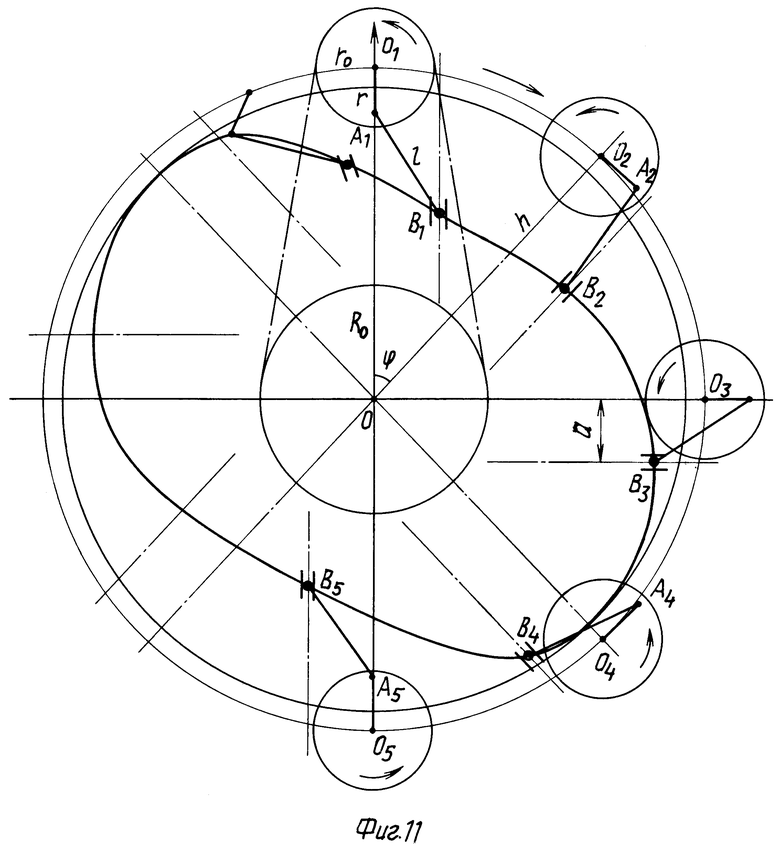
На фиг. 8 и 9 показан вид криволинейной направляющей ротора или корпуса по предлагаемому способу построения автора с параметрами описывающего механизма λ=2,8; ξ=1,6 и λ=2,2; ξ=1,6 соответственно. Направляющая кривая ползуна имеет прямолинейный участок 1-2 и криволинейный участок 2-3. Криволинейный участок предотвращает заклинивание ползуна при величине нецентральности кривошипно-ползунного механизма больше величины кривошипа. По фиг.10 показана возможность описания несимметричной направляющей кривой цилиндрической поверхности ротора или корпуса по способу построения, предлагаемому автором, с помощью четырехзвенного кулисного механизма с подвешенной кулисой. Аналогичные несимметричные направляющие кривые могут быть получены при перекатывании производящей окружности по неподвижной, без скольжения и на расстоянии. В этом случае синхронность перекатывания производящей окружности конструктивно обеспечивается, к примеру, цепной передачей или ременной зубчатой передачей и др. По фиг.11 показан такой вариант решения задачи, где для описания кривой применен нецентральный кривошипно-ползунный механизм, как механизм с различными ходами по углу поворота кривошипа, с размещением неподвижной и производящей окружностей на расстоянии h.
На фиг. 1 изображен схематично механизм для построения направляющей кривой цилиндрической поверхности ротора или корпуса со следующими обозначениями: неподвижная окружность - О, производящая окружность О1, с жестко закрепленным кривошипом - r, производящая окружность закреплена на луче, повернутом на угол ϕ, параллельно этому лучу на расстоянии а закреплена в определенном положении направляющая ось ползуна кривошипно-ползунного механизма с кривошипом - r, шатуном - l, с одной из точек ползуна Е на расстоянии ВЕ и под углом α к направляющей оси ползуна. На этой же фигуре представлены обозначения всех углов и вспомогательных отрезков, необходимых для вывода уравнений направляющей кривой по автору. Это угол ϕ(λ, ξ) = γ между шатуном и осью X и d - проекция расстояния одной из точек ползуна, угол β между шатуном и осью ползуна кривошипно-шатунного механизма и угла ψ поворота кривошипа. На фиг.2 изображен наглядный пример получения симметричной направляющей кривой с помощью центрального кривошипно-ползунного механизма, с указанием точек О1А1В1Е1 через каждые 90o поворота кривошипа за период, соответствующий 45o поворота луча на угол ϕ, при отношении радиусов окружностей Rо/rо, равных двум, при этом получена кривая, похожая на эллипс. На фиг. 3, 4 с целью объяснения сути изобретения наглядно показан ход описания несимметричной направляющей цилиндрической поверхности ротора или корпуса с помощью нецентрального кривошипно-ползунного механизма с указанием его точек О1А1В1Е1 через каждые 90o поворота кривошипа за период, соответствующий каждым 45o поворота луча на угол ϕ, при отношении радиусов окружностей неподвижной - R0 и производящей - r0, равном двум. Нецентральность механизмов по фиг.3 - a<r, а по фиг.4 - a>r, что наглядно показывает зависимость формы направляющей кривой от величины a нецентральности. На фиг.5 условно показана точка b ползуна, как одна из его точек, через которую проходит плоскость, которая делит несимметричный объем, образованный известной цилиндрической поверхностью с круговой направляющей и предлагаемой с направляющей кривой автора. Объем между дугой аb больше объема, заключенного между дугой bc, а точка b расположена на половине хода рабочего органа. При вращении ротора происходит изменение несимметричного объема по степенной зависимости - как объяснение третьего свойства цилиндрической поверхности с направляющей кривой по автору. На фиг.6 показано действие распределенных сил F, равномерно по цилиндрической поверхности ротора по автору, относительно центра вращения O в системе декартовых координат с периодом 180o. Здесь показан пример определения момента одной из точек цилиндрической поверхности с кривой автора, где n - плечо, сила F действует перпендикулярно плечу для данной точки поверхности, расположенной на радиусе под углом ψ от оси X. Пунктирной линией показаны границы ас и bd положительных значений моментов, сb и da отрицательных значений моментов собственной механической характеристики цилиндрической поверхности роторов с криволинейной направляющей по автору, которые зависят только от соотношений параметров нецентральных кривошипно-ползунных механизмов. На фиг.7 изображены графики моментов распределенных сил по цилиндрической поверхности ротора I - с несимметричной направляющей кривой по фиг.4 и II - с симметричной направляющей кривой по фиг.2 с периодом 180o. На фиг.8, 9 с целью наглядного изложения альтернативного признака, изображены ход описания несимметричной направляющей кривой цилиндрической поверхности ротора или корпуса с помощью нецентрального кривошипно-ползунного механизма с некруговой произвольной, но необходимой направляющей, с указанием его точек О1А1В1 через каждые 90o поворота кривошипа, за период, соответствующий 45o поворота луча на угол ϕ, при отношении радиусов R0 и r0 окружностей, равном двум. На фиг.8 параметр механизма λ=2,8, а на фиг.9 λ= 2,2 при одинаковых нецентральностях и произвольных, но подобных кривых на участках 2, 3, наглядно показаны формы и величины несимметричных направляющих кривых роторов по автору. На фиг.10 изображена возможность описания несимметричной направляющей ротора с помощью механизма, содержащего кривошип с различным ходом по углу поворота кривошипа, как раскрытие альтернативного признака, где берут четырехзвенный кулисный механизм с подвешенной кулисой, а описывающей точкой является точка Е на конце дуги траектории одной из точек D коромысла на продолжении рычага подвеса кулисы CB. Звенья механизма обозначены: r - кривошип с ползуном в центре A, А1В1 - направляющая ось кулисы, С1В1 - рычаг подвеса кулисы, В1D1 - коромысло на продолжении рычага подвеса, D1E1 - дуга траектории точки D1, Е1 - точка, описывающая несимметричную кривую автора. Отношения R0 и r0 радиусов окружностей равны двум. На фиг. 11 показано решение поставленной задачи с размещением неподвижной и производящей окружностей на определенном расстоянии h, с сохранением всех шести вышеизложенных свойств в различной степени качества. На фиг.11 изображен механизм О1А1В1 с центрами неподвижной О и О1 производящей окружности на расстоянии h, точки механизма О1А1В1 через каждые 90o поворота кривошипа за период, соответствующий каждым 45o поворота луча на угол ϕ, при отношении радиусов R0 и r0 окружностей, равном двум.
Возможность осуществления изобретения.
Построение направляющей кривой для цилиндрической поверхности ротора или корпуса осуществляют следующим образом. В системе декартовых координат X и Y производящую окружность обкатывают без скольжения по неподвижной окружности, одновремменно с производящей окружностью жестко закрепляют кривошип, к примеру нецентрального кривошипно-ползунного механизма, точки которого описывают эпитрохоиды с отношением радиусов неподвижной и производящей окружностей, равным двум, а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек E ползуна по фиг.1 этого кривошипно-ползунного механизма с энергетическим параметром A(λ, ξ)≠2, а точки направляющей кривой определяют уравнениями по [I, II]. Как альтернативный признак берут механизм, содержащий кривошип, с различным ходом по углу поворота кривошипа на примере четырехзвенного кулисного механизма с подвешенной кулисой, а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек одного из звеньев механизма к примеру точкой Е1 по фиг.10 или фиг.8, 9, при этом точки направляющей кривой автора определяют уравнениями по [III, IV]. На фиг.3 наглядно показано построение направляющей кривой с отношением радиусов неподвижной и производящей окружностей для случая, равным двум. По этой фигуре в начальный момент времени задаем следующие значения параметров ϕ=0, ψ=0, γ1 = ϕ1(λ, ξ) для данного соотношения величин звеньев нецентрального кривошипно-ползунного механизма О1А1В1 с точкой Е1 ползуна, совпадающей с осью направляющей для предотвращения загромождения чертежа. Ведется перекатывание без скольжения производящей окружности по часовой стрелке. Ось направляющей ползуна принята параллельной к лучу поворота вращения, проходящему по центру производящей окружности, в самом общем случае конструктивно может допускаться размещение оси направляющей под определенным углом к лучу поворота ϕ. На фиг.3 показан весь период вращения кривошипа r с разделением равными интервалами положения луча ОС через каждые 45o по часовой стрелке поворота угла ϕ, что соответствует 90o поворота кривошипа, с соответствующими цифрами 1-5 положения луча ОС с вращением без скольжения производящей окружности с центром О1 по неподвижной окружности О. В следующий момент времени производящая окружность О2 катится без скольжения по неподвижной окружности по часовой стрелке равномерно. Луч ОС принимает положение 2 по наружной окружности, которая является вспомогательной. Произошел поворот угла ϕ на 45o, а поворот кривошипа на 90o вместе с производящей окружностью. Для положения 2 значение углов принимает значение ϕ=45o, ψ=90o, γ2 = ϕ2(λ, ξ), кривошипно-ползунный механизм принимает положение О2А2В2 с точкой направляющей кривой Е2, которая перемещается параллельно лучу ОС вдоль радиуса к центру, делает неравномерное движение, описываемое уравнениями [I,II]. От положения 1 до положения 2 угол γ2 изменяется приблизительно на 30o относительно оси ОС. Далее в положение 3 луча ОС кривошипно-ползунный механизм примет положение О3А3В3 с точкой направляющей кривой Е3 при этом углы равны ϕ=90o, ψ=180o, γ3 = ϕ3(λ, ξ), угол γ3 увеличится приблизительно на 70o, скорость точки Е3 перемещения
к центру О уменьшилась и далее изменится незначительно. В следующий момент времени луч ОС примет положение 4 с размещением кривошипно-ползунного механизма О4А4В4 с точкой E4 направляющей кривой, при этом углы примут значения ϕ=135o, ψ=270o, γ4 = ϕ4(λ, ξ). Скорость точки Е4 изменится на противоположное направление и будет направлена от центра на незначительную величину, угол γ4 также изменится приблизительно на 70o, по сравнению с предыдущим положением. В следующем положении луча ОС точка Е5 с большей скоростью возвращается в первоначальное положение и соответствует положению механизма О5А5В5 с углами ϕ=180o, ψ=360o, γ5 = ϕ5(λ, ξ). Завершается один период вращения кривошипа и производящая окружность совершает один полный оборот вокруг оси О1, перекатываясь без скольжения по неподвижной окружности, охватив ее длину ровно на половину, что соответствует отношению радиусов числу два по формуле. Дальнейшее вращение производящей окружности без скольжения по неподвижной окружности приведет к образованию такой же формы направляющей кривой автора, ее второй половины по предлагаемому автором способу построения. Аналогичным образом происходит осуществление способа построения направляющей кривой цилиндрической поверхности ротора или корпуса для любого механизма, содержащего кривошип, с различным ходом по углу поворота кривошипа, с помощью которого описывается кривая автора.
Вариант второй. Новый способ построения направляющей кривой цилиндрической поверхности ротора или корпуса заключается в том, что ее построение осуществляют в системе декартовых координат Х и Y, неподвижно фиксируют кривошип кривошипно-ползунного механизма с осью направляющей, не проходящей через ось вращения кривошипа, а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек ползуна этого кривошипно-ползунного механизма с энергетическим параметром
A(λ, ξ)≠2,
где А - энергетический параметр механизма;
λ - относительная величина шатуна механизма;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа,
при этом точки направляющей кривой определяют следующими уравнениями:
X = rcosϕ+lcosϕ(λ, ξ)+dcosϕ; [V],
Y = rsinϕ+lsinϕ(λ, ξ)+dsinϕ; [VI],
где Х и Y - оси декартовых координат;
r - длина кривошипа;
ϕ - угол между осью Х и кривошипом;
l - длина шатуна;
ϕ(λ, ξ) - угол между осью Х и шатуном;
λ - относительная величина шатуна;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа;
d - расстояние от точки направляющей кривой до центра шарнира соединения шатуна и ползуна,
или берут механизм, содержащий кривошип, с различным ходом по углу поворота кривошипа и с энергетическим параметром
A(λi, ρi,...)≠2,
где А - энергетический параметр механизма;
λi, ρi,... - относительные величины звеньев механизма, обеспечивающих различие ходов по углу поворота кривошипа,
а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек одного из звеньев механизма, при этом точки направляющей кривой определяют следующими уравнениями:
где li - длина одного из звеньев механизма, связанного с кривошипом,
ϕ(λiρi,...)i - угол между осью Х и одним из звеньев, связанным с кривошипом, в зависимости от параметров механизма, обеспечивающих различие ходов по углу поворота кривошипа,
di+n - расстояние от предыдущей точки отсчета до точки направляющей кривой;
ϕn - угол между осью Х и величиной расстояния между точкой направляющей кривой и предыдущей точкой отсчета.
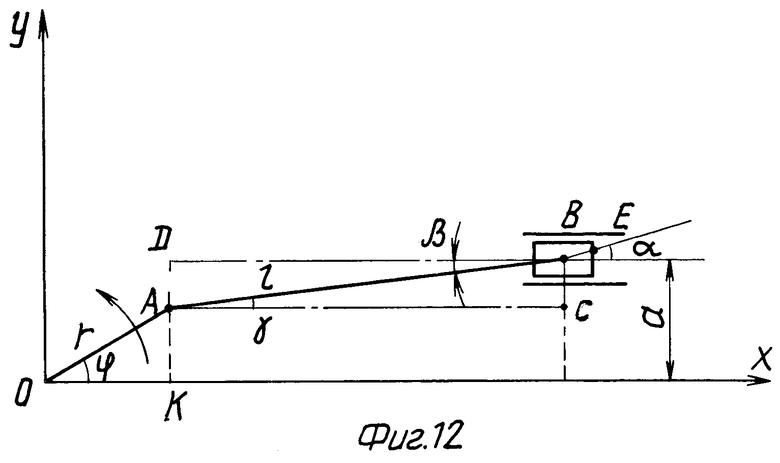
Точки направляющей кривой определены уравнениями [V, VI] по фиг.12, аналогично варианта предыдущего описания изобретения с той разницей, что нет окружностей, как неподвижной, так и производящей, а точки пересечения осей координат совпадает с центром вращения кривошипа. Значение угла γ = ϕ(λ, ξ) выводится из треугольников  и
и  по фиг.12, где γ = β = ϕ(λ, ξ), АК= rsinϕ, AD=a-rsinϕ, AD=lsinβ, a-rsinϕ = lsinβ, тогда
по фиг.12, где γ = β = ϕ(λ, ξ), АК= rsinϕ, AD=a-rsinϕ, AD=lsinβ, a-rsinϕ = lsinβ, тогда 
Возможны два варианта: 1. a>r и 2. a<r.
В первом случае
во втором случае
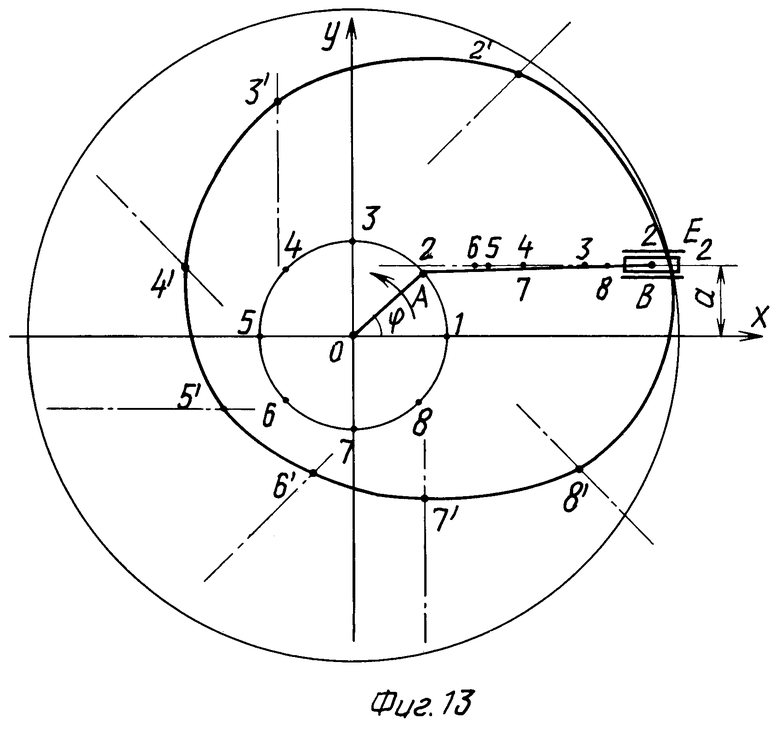
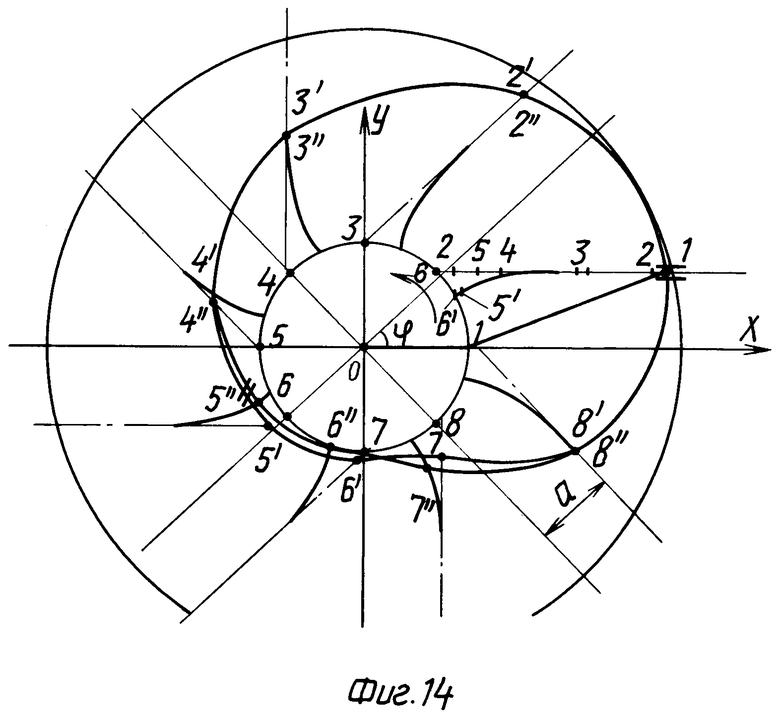
Рассмотрев уравнения направляющей кривой [V, VI], можно сделать вывод, что ее вид зависит только от величин шатуна и нецентральности кривошипно-ползунного механизма в отличие от первого вариантом изобретения. На фиг.13 показан вид и форма направляющей кривой по второму варианту изобретения с нецентральным кривошипно-ползунным механизмом, точкой В ползуна которого описывается кривая. Период образования кривой автора по второму варианту всегда равен длине окружности. При энергетическом параметре кривошипно-ползунного механизма A(λ, ξ)≠2, имеет место центральный кривошипно-ползунный механизм, где направляющая ползуна проходит через центр оси вращения кривошипа, а вид образованной направляющей кривой является симметричной относительно половины периода. Аналогично точки направляющей кривой определяются уравнениями [VII, VIII] при использовании любого механизма, содержащего кривошип с несимметричным или различным ходом по углу поворота кривошипа. В качестве примера может быть использован нецентральный кривошипно-ползунный механизм с частично прямолинейной и частично овальной направляющей ползуна. Или четырехзвенный кулисный механизм с подвешенной кулисой и другие. На фиг. 14 показана направляющая кривая автора цилиндрической поверхности ротора или корпуса по способу построения, предложенному автором, с обозначениями цифр с двумя штрихами 1", 2", 3", 4", 5", 6", 7", 8", описанная нецентральным кривошипно-ползунным механизмом с частично прямолинейной и частично овальной направляющими, на фоне направляющей кривой автора, описанной одной из точек ползуна, как одной из точек одного из звеньев, кривошипно-ползунного механизма с прямолинейной направляющей, с обозначением цифр с одним штрихом, 1', 2', 3', 4', 5', 6', 7', 8'. На прямолинейных участках при одинаковых параметрах кривошипно-ползунного механизма точки направляющей кривой совпадают.
Свойства цилиндрической поверхности ротора или корпуса с направляющей кривой автора по предлогаемому способу построения:
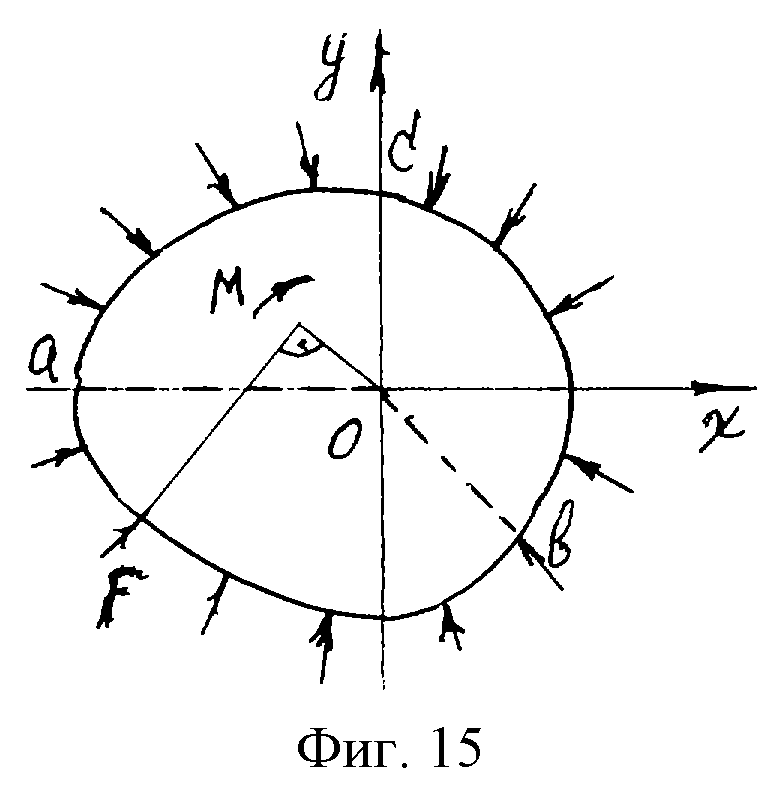
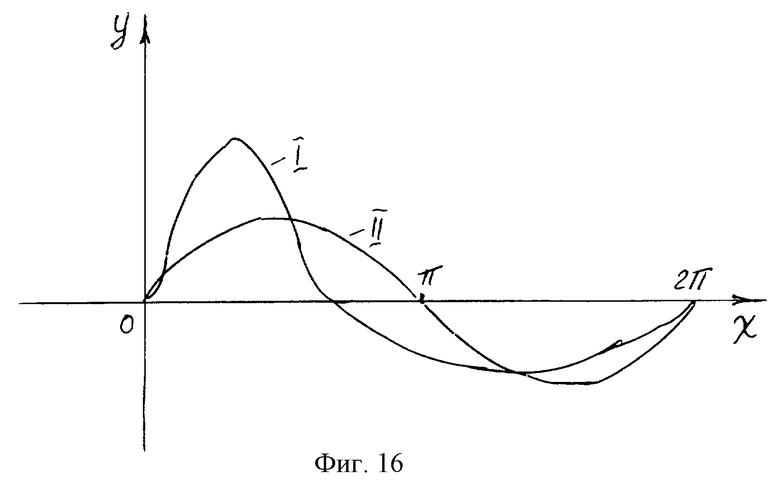
1. Передавать или воспринимать распределенные силы по цилиндрической поверхности, по несимметричной собственной механической характеристике, в зависимости от параметров нецентрального кривошипно-ползунного механизма или от параметров механизма, содержащего кривошип, обеспечивающих различие ходов по углу поворота кривошипа по фиг.15 и 16.
2. В зависимости от параметров механизмов, содержащих кривошип, точки звеньев которых описывают направляющие кривые автора, амплитуды собственных механических характеристик имеют свойство смещаться влево или вправо от оси симметрии, что обеспечит широкий подбор прилагаемых усилий в устройствах.
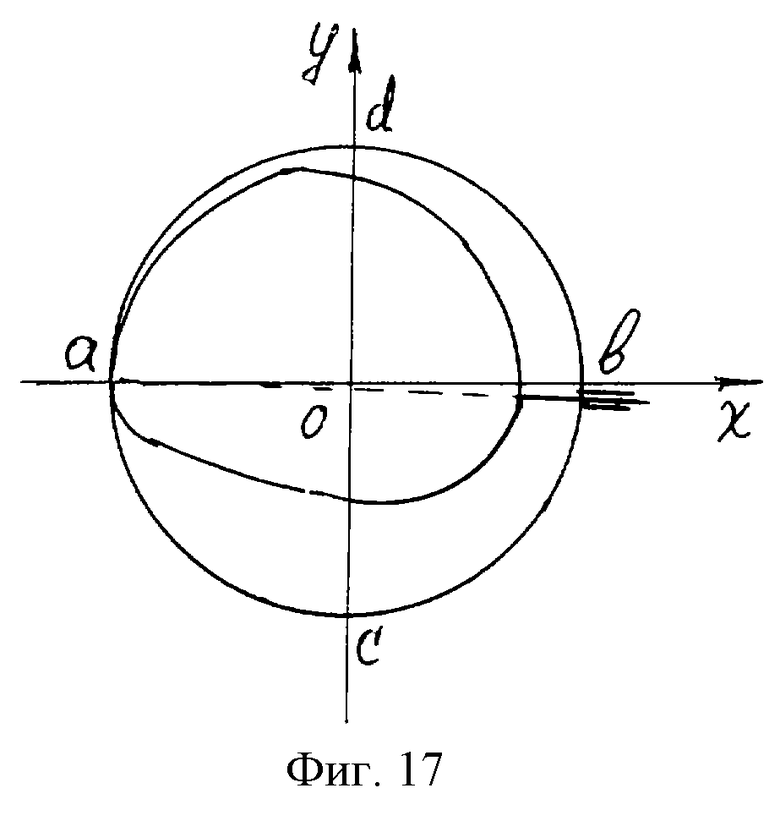
3. Возможность образования с описанной цилиндрической поверхностью с круговой направляющей изменяемых несимметричных объемов относительно половины периода, по фиг.17.
4. Возможность изменения рабочего объема, по пункту 3, посредством, к примеру, плоскости, соединенной с одной из точек ползуна нецентрального кривошипно-ползунного механизма, по степенной зависимости, что обеспечивает работу тепловых машин по циклу Яримова (3).
5. С учетом четырех вышеизложенных свойств, к примеру ротор имеет возможность передавать оптимальным образом энергию термодинамических процессов или сил давления расширяющихся газов непосредственно на выходной вал ДВС, т. е. без механического преломления.
6. Двигатель внутреннего сгорания, к примеру с ротором, имеющим цилиндрическую поверхность с предлагаемой направляющей кривой, имеет существенный термический и механический КПД.
Способ построения направляющей кривой автора цилиндрической поверхности ротора или корпуса можно осуществить двумя путями, при которых получится одно и то же уравнение [V, VI] или [VII, VIII].
1. Зафиксировать на плоскости в системе координат X и Y нецентральный, к примеру, кривошипно-ползунный механизм по фиг.12 ОАВ, совместив начало координат O с центром вращения кривошипа и установив ось перемещения ползуна параллельно оси Х. Данная плоскость должна иметь прямолинейную прорезь так, чтобы зафиксированное в точке Е острие карандаша или ручки, перпендикулярное плоскости, могла наносить кривую на подложенный лист бумаги под эту плоскость. При этом на нижнем листе бумаги также нанесены оси декартовых координат Х и Y, совпадающие с осями координат на плоскости в первоначальном положении. При этом кривошип жестко связан с нижним листом бумаги в центре точки O с возможностью его вращения совместно. При вращении кривошипа на плоскости вокруг центра O и неподвижной стойке острие карандаша иди ручки нанесет направляющую кривую на вращающемся нижнем листе бумаги совместно с кривошипом по предложенному автором способу построения. Или аналогично, данная плоскость должна иметь дугообразную прорезь для механизмов, имеющих кривошип с различным ходом по углу поворота кривошипа и завершающихся к примеру коромыслом, и чтобы зафиксированное в одной из точек коромысла острие карандаша или ручки, перпендикулярное плоскости, могло наносить кривую на подложенный лист бумаги под эту плоскость.
2. Зафиксировать на плоскости в системе координат Х и Y, к примеру, нецентральный кривошипно-ползунный механизм по фиг.12 ОАВ, совместив начало координат O с центром вращения стойки, при неподвижном кривошипе ОА. При вращении стойки, оси направляющей ползуна вокруг точки О, точка Е ползуна нецентрального кривошипно-ползунного механизма опишет направляющую кривую автора цилиндрической поверхности ротора или корпуса устройств, соответствующую уравнениям [V, VI] или [VII, VIII].
На фиг.12 изображена схема механизма для выполнения направляющей кривой цилиндрической поверхности ротора иди корпуса с обозначениями и вспомогательными отрезками для выведения формул кривой. На этой фигуре также показаны углы ϕ, γ = ϕ(λ, ξ), β и α, фигурирующие при выводе формул, звенья нецентрального кривошипно-ползунного механизма: r - кривошип, l - шатун, а - нецентральность, расстояние от оси направляющей ползуна до оси вращения кривошипа, d - расстояние от точки E до центра шарнира крепления ползуна к шатуну, 

 - треугольники, как вспомогательные фигуры для вывода формул, α - угол между осью Х и прямой - расстоянием между точкой направляющей кривой и центром крепления ползуна к шатуну. На фиг.13 изображена направляющая кривая цилиндрической поверхности ротора или корпуса с несимметричной направляющей кривой со схемой механизма, ее образующего, и с указанием точек кривой 1', 2', 3', 4', 5', 6', 7', 8' через каждые 45o поворота кривошипа или стойки и указанием звеньев r, l, a кривошипно-ползунного механизма ОАВ. На фиг.14 показаны направляющие кривые, описанные посредством нецентрального кривошипно-ползунного механизма, только с прямолинейной направляющей, а также, как альтернативного признака, - нецентрального кривошипно-ползунного механизма с частично прямолинейной и частично овальной направляющей ползуна, с указанием точек кривых автора 1', 2', 3', 4', 5', 6', 7', 8' и 1", 2", 3", 4", 5", 6", 7", 8" через каждые 45o поворота кривошипа или стойки. На фиг.15 показан ротор с перпендикулярными направляющей кривой распределенными силами F равномерно по цилиндрической поверхности. Пунктирной линией показаны границы секторов по дуге аb - положительные значения моментов, по дуге асb - отрицательные значения моментов, по Фиг.16 собственных механических характеристик цилиндрических поверхностей, которые зависят только от соотношения параметров описывающих кривошипно-ползунных механизмов. График I представлен для несимметричных поверхностей роторов, график II для симметричных поверхностей вида по фиг.18, с периодами "два пи", в системе координат Х и Y. На фиг.17 показана возможность образования несимметричного рабочего объема изменяемого по степенной зависимости. Внутри цилиндрической поверхности с круговой направляющей вписан ротор с цилиндрической поверхностью с направляющей кривой по автору соосно и разделительной плоскостью-перегородкой, проходящей через одну из точек ползуна нецентрального кривошипно-ползунного механизма, при этом эта точка ползуна одновременно принадлежит кривой направляющей цилиндрической поверхности ротора. Объем, заключенный по дуге аdb, меньше объема, заключенного по дуге асb, то есть объем, заключенный между ротором и корпусом, несимметричен относительно половины хода рабочего органа. В точке b условно показана плоскость, проходящая через точку ползуна нецентрального кривошипно-ползунного механизма.
- треугольники, как вспомогательные фигуры для вывода формул, α - угол между осью Х и прямой - расстоянием между точкой направляющей кривой и центром крепления ползуна к шатуну. На фиг.13 изображена направляющая кривая цилиндрической поверхности ротора или корпуса с несимметричной направляющей кривой со схемой механизма, ее образующего, и с указанием точек кривой 1', 2', 3', 4', 5', 6', 7', 8' через каждые 45o поворота кривошипа или стойки и указанием звеньев r, l, a кривошипно-ползунного механизма ОАВ. На фиг.14 показаны направляющие кривые, описанные посредством нецентрального кривошипно-ползунного механизма, только с прямолинейной направляющей, а также, как альтернативного признака, - нецентрального кривошипно-ползунного механизма с частично прямолинейной и частично овальной направляющей ползуна, с указанием точек кривых автора 1', 2', 3', 4', 5', 6', 7', 8' и 1", 2", 3", 4", 5", 6", 7", 8" через каждые 45o поворота кривошипа или стойки. На фиг.15 показан ротор с перпендикулярными направляющей кривой распределенными силами F равномерно по цилиндрической поверхности. Пунктирной линией показаны границы секторов по дуге аb - положительные значения моментов, по дуге асb - отрицательные значения моментов, по Фиг.16 собственных механических характеристик цилиндрических поверхностей, которые зависят только от соотношения параметров описывающих кривошипно-ползунных механизмов. График I представлен для несимметричных поверхностей роторов, график II для симметричных поверхностей вида по фиг.18, с периодами "два пи", в системе координат Х и Y. На фиг.17 показана возможность образования несимметричного рабочего объема изменяемого по степенной зависимости. Внутри цилиндрической поверхности с круговой направляющей вписан ротор с цилиндрической поверхностью с направляющей кривой по автору соосно и разделительной плоскостью-перегородкой, проходящей через одну из точек ползуна нецентрального кривошипно-ползунного механизма, при этом эта точка ползуна одновременно принадлежит кривой направляющей цилиндрической поверхности ротора. Объем, заключенный по дуге аdb, меньше объема, заключенного по дуге асb, то есть объем, заключенный между ротором и корпусом, несимметричен относительно половины хода рабочего органа. В точке b условно показана плоскость, проходящая через точку ползуна нецентрального кривошипно-ползунного механизма.
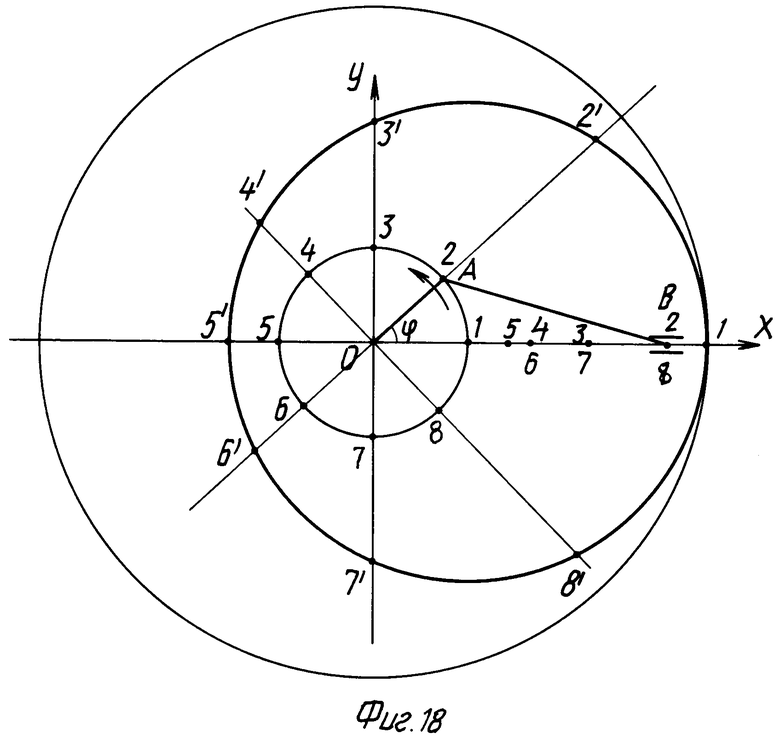
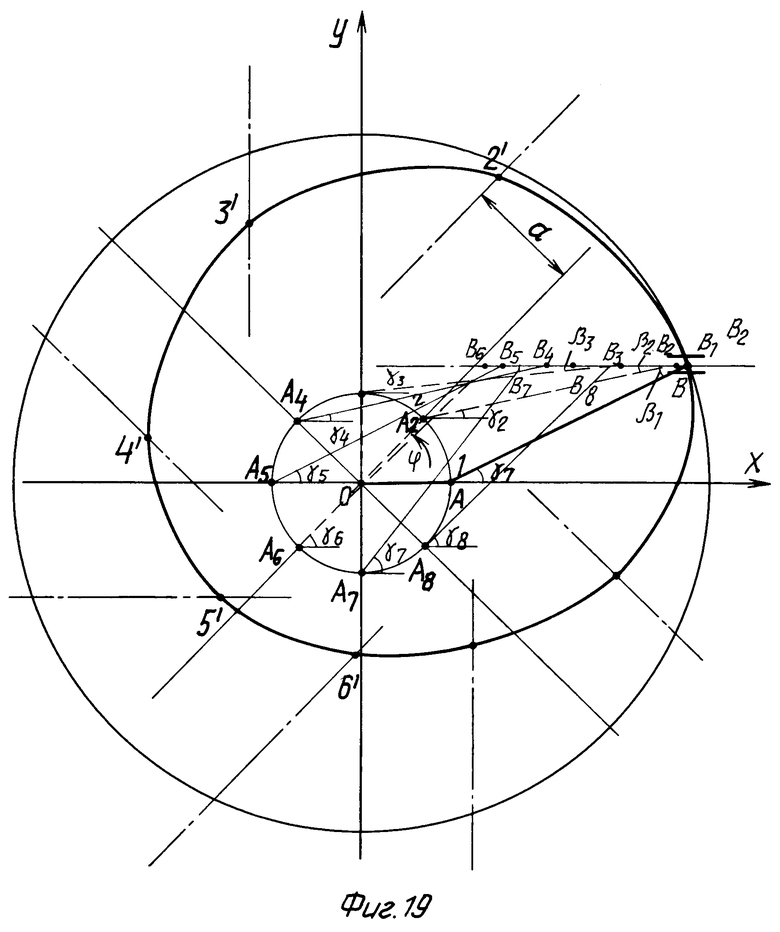
На фиг.18 показана симметричная направляющая кривая, образованная центральным кривошипно-ползунным механизмом с указанием ее точек 1', 2', 3', 4', 5', 6', 7', 8', через каждые 45o поворота кривошипа или стойки. На фиг.19 показана направляющая кривая цилиндрической поверхности ротора или корпуса, построенная с помощью механизма с нецентральностью а, большей величины кривошипа r с указанием точек направляющей 1', 2', 3', 4', 5', 6', 7', 8' через каждые 45o поворота кривошипа или стойки кривошипно-ползунного механизма.
В случае примера построения направляющей кривой, изображенной на фиг.19 в начальный момент времени, задаем следующие значения угла ϕ = 0, γ1, β1, которым соответствует начальное расположение нецентрального кривошипно-ползунного механизма ОАВ и одной из точек ползуна В. В следующий момент времени после поворота кривошипа на угол 45o против часовой стрелки значения углов начинают изменяться в положении ϕ = 45°, γ2, β2, образующий механизм примет положение ОА2В2. В связи с тем, что "ротор" повернется совместно с кривошипом также на 45o, эту точку надо перенести в точку 2' кривой или 2' на "нижнем листе бумаги" по условному новому положению механизма. В следующий момент времени после дальнейшего поворота кривошипа ОА3 против часовой стрелки на 90o вместе с жестко закрепленным "ротором" и на нем точки В3 ползуна продолжает описывать кривую автора, а значение углов изменяется далее ϕ = 90°, γ3, β3, γ3 - уменьшится далее до минимального, а положение ползунного механизма ОА3В3, а скорость точки В3 увеличивается вдоль направляющей ползуна к центру "ротора". После переноса на "ротор" она соответствует точке 3', который условно вращается под листом вместе с кривошипом. В следующий момент времени после поворота кривошипа ОА против часовой стрелки на 135o значения углов изменятся далее ϕ = 135°, γ4, β4, γ4 - после предельного уменьшения начинает увеличиваться, точка 4' продолжает приближаться к центру вращения О кривошипа с одновременным уменьшением скорости, перпендикулярной к радиусу кривизны в данной точке 4'. Положение нецентрального кривошипно-ползунного механизма соответствует ОА4В4. Далее в положении ОА5В5 механизма точка 5' направляющей кривой будет соответствовать углам ϕ = 180°, γ5, β5, где γ5 - продолжает увеличиваться, достигнув максимального значений в точке 6'. B этой точке кривая имеет минимальное расстояние до центра О вращения кривошипа, a углы примут значения ϕ = 225°, γ6, β6, при положении механизма ОА6В6. В следующие моменты времена одна из точек ползуна кривошипно-ползунного механизма В7 и В8 c большой скоростью возвращается в первоначальное положение, минуя углы ϕ = 270°, γ7, β7 и ϕ = 315°, γ8, β8 с точками направляющей кривой 7' и 8'. Аналогичная кривая получится, если на листе бумаги в системе координат Х и Y, к примеру, неподвижно зафиксировать кривошип ОА нецентрального кривошипно-ползунного механизма в определенном положении к примеру ОА, а затем вращать стойку или ось направляющей ползуна, условно возьмем линию с точками от В1 по В6 вокруг оси О на той же фиг.19 с сохранением расстояния нецентральности а, параллельной лучу поворота на угол ϕ. Тогда опять точка В - одна из точек ползуна начертит несимметричную кривую автора. Это покажет совпадение точки В с цифрами 1', 2', 3', 4', 5', 6', 7', 8', и если начертить этот кривошипно-ползунный механизм ОАВ с зафиксированными в одном положении кривошипа ОА, а ось направляющей ползуна начертить через каждые 45o последовательно, к примеру, против часовой стрелки с соответствующими положениями ползуна и шатуна.
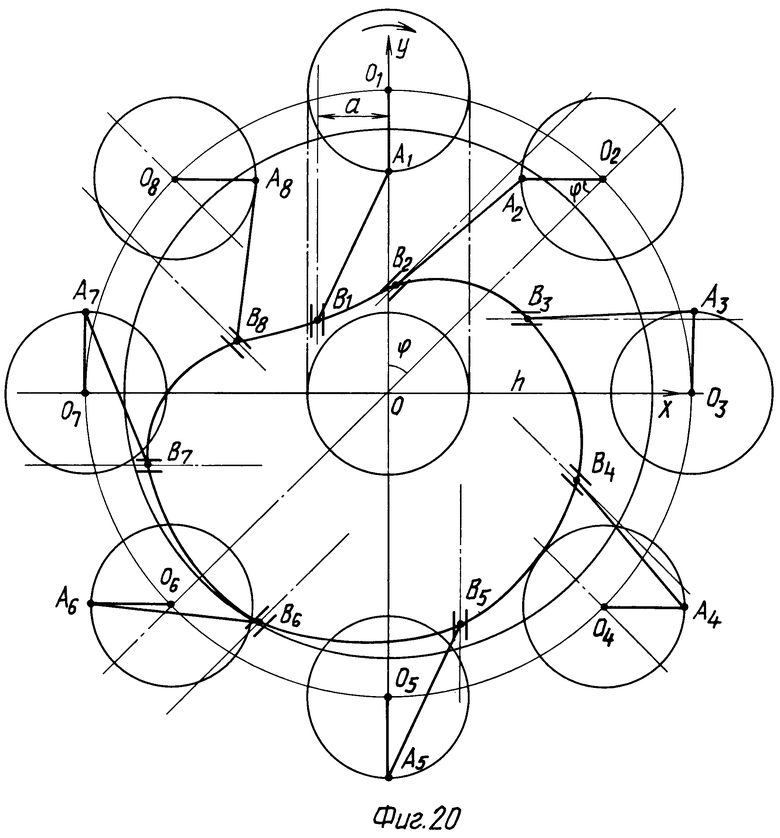
На фиг. 20 показана возможность исполнения изобретения с размещением на расстоянии h кривошипа ОА такого же кривошипно-ползунного механизма с синхронным приводом, к примеру, цепным или зубчатым ремнем, с соответствующими положениями механизма ОАВ через каждые 45o, которым соответствует положение точек В1, В2, В3, В4, В5, В6, В7, В8 направляющей кривой цилиндрической поверхности ротора или корпуса устройств, по способу, предлагаемому автором.
С аналогичной последовательностью происходит описание или вычерчивание направляющих кривых цилиндрической поверхности ротора или корпуса по способу построения, предложенному автором, с помощью любого механизма, содержащего кривошип, с различными ходами по углу поворота кривошипа, одной из точек одного из звеньев этого механизма.
Угол α является конструктивным элементом и может не фигурировать в формулах [I-VII] ввиду того, что, к примеру, точка направляющей кривой лежит на оси перемещения ползуна по фиг.13, 19.
Предлагаемый способ построения направляющей кривой автора цилиндрической поверхности ротора или корпуса (варианты) соответствует критериям изобретения, является новым, имеет изобретательский уровень и промышленно применим.
Источники информации
1. Б.Н. Бирюков, "Роторно-поршневые гидравлические машины, Москва, Машиностроение, 1972, стр. 41-49, рис. 30-32.
2. Патент России, М.О. Яримов, 2163997 по заявке 99104449/06, "Способ построения направляющей кривой цилиндрической поверхности ротора или корпуса (варианты), с датой приоритета 09.03.1999 г.
3. М.О. Яримов, Патент России 2160373, "Способ работы ДВС по циклу автора", с датой приоритета 11.01.1999 г.
4. И. И. Артоболевский, Справочник, "Механизмы в современной технике", Москва, Наука, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ РАБОЧЕГО ОБЪЕМА ДВИГАТЕЛЯ (ТЕПЛОВОЙ МАШИНЫ) | 2001 |
|
RU2213873C2 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| ДЕЗАКСИАЛЬНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ ЯРИМОВА | 2002 |
|
RU2267672C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ЯРИМОВА | 2005 |
|
RU2290520C1 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ ПО МЕХАНИЧЕСКОМУ ЦИКЛУ ЯРИМОВА И ДВИГАТЕЛЬ ЯРИМОВА | 2003 |
|
RU2249709C2 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2004 |
|
RU2265726C2 |
| ЧЕТЫРЕХЗВЕННЫЙ ШАРНИРНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ ЯРИМОВА | 1991 |
|
RU2043550C1 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2154174C2 |
| ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ ЯРИМОВА | 1992 |
|
RU2073803C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ С КРУГОВОЙ НАПРАВЛЯЮЩЕЙ ЯРИМОВА | 1992 |
|
RU2092731C1 |
Группа изобретений относится к машиностроению и может быть использована в ДВС, тепловых машинах, пневматических устройствах, насосах и гидроагрегатах. Способ построения направляющей кривой цилиндрической поверхности ротора или корпуса включает описание кривой посредством нецентрального кривошипно-ползунного механизма с энергетическими параметрами А(λ, ξ) ≠ 2, где А - энергетический параметр механизма, λ - относительная величина шатуна ползунного механизма, ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа, или механизма, содержащего кривошип с различным ходом по углу поворота кривошипа, а несимметричную относительно оси Y системы координат направляющую кривую описывают одной из точек одного из звеньев механизма, при этом точки направляющей кривой определяют следующими уравнениями:
или
а также уравнениями
X = rcosϕ+lcosϕ(λ, ξ)+dcosϕ;
Y = rsinϕ+lsinϕ(λ, ξ)+dsinϕ,
или
Способ построения направляющей кривой цилиндрической поверхности ротора или корпуса устройств позволяет упростить конструктивное исполнение, а также расширить конструктивные возможности по сравнению с существующими. 2 с.п. ф-лы, 20 ил.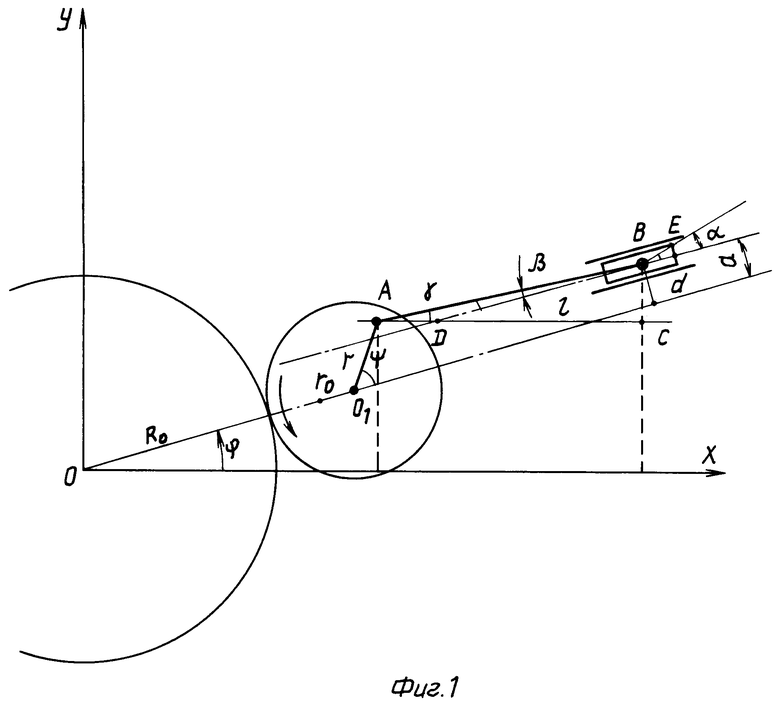
A(λ, ξ)≠2,
где А - энергетический параметр механизма;
λ - относительная величина шатуна механизма;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа,
при этом точки направляющей кривой определяют следующими уравнениями:
где Х и У - оси декартовых координат;
R0 - радиус неподвижной окружности;
r0 - радиус производящей окружности;
ϕ - угол поворота вращения луча, проходящего через центр вращения производящей окружности от оси Х;
r - длина кривошипа;
l - длина шатуна;
ϕ(λ, ξ) - угол между осью Х и шатуном;
λ - относительная величина шатуна;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа;
d - расстояние от точки направляющей кривой до центра шарнира соединения шатуна и ползуна,
или берут механизм, содержащий кривошип, с различным ходом по углу поворота кривошипа и с энергетическим параметром
A(λi, ρi,...)≠2,
где А - энергетический параметр механизма;
λi, ρi,... - относительные величины звеньев механизма, обеспечивающие различие ходов по углу поворота кривошипа,
а несимметричную относительно оси У системы координат направляющую кривую описывают одной из точек одного из звеньев этого механизма, при этом точки направляющей кривой определяют следующими уравнениями:
где li - длина одного из звеньев механизма, связанного с кривошипом;
ϕ(λiρi,...)i - угол между осью Х и одним из звеньев, связанных с кривошипом, в зависимости от параметров механизма, обеспечивающих различие ходов по углу поворота кривошипа;
di+n - расстояние от предыдущей точки отсчета до точки направляющей кривой;
ϕn - угол между осью Х и величиной расстояния между точкой направляющей кривой и предыдущей точкой отсчета.
A(λ, ξ)≠2,
где А - энергетический параметр механизма;
λ - относительная величина шатуна механизма;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа,
при этом точки направляющей кривой определяют следующими уравнениями:
X = rcosϕ+lcosϕ(λ, ξ)+dcosϕ;
Y = rsinϕ+lsinϕ(λ, ξ)+dsinϕ,
где Х и У - оси декартовых координат;
r - длина кривошипа;
ϕ - угол между осью Х и кривошипом;
l - длина шатуна;
ϕ(λ, ξ) - угол между осью Х и шатуном;
λ - относительная величина шатуна;
ξ - относительная величина расстояния от оси направляющей ползуна до центра оси вращения кривошипа;
d - расстояние от точки направляющей кривой до центра шарнира соединения шатуна и ползуна,
или берут механизм, содержащий кривошип, с различным ходом по углу поворота кривошипа и с энергетическим параметром
A(λi, ρi,...)≠2,
где А - энергетический параметр механизма;
λi, ρi,... - относительные величины звеньев механизма, обеспечивающие различие ходов по углу поворота кривошипа,
а несимметричную относительно оси У системы координат направляющую кривую описывают одной из точек одного из звеньев этого механизма, при этом точки направляющей кривой определяют следующими уравнениями
где li - длина одного из звеньев механизма, связанного с кривошипом;
ϕ(λi, ρi,...)i - угол между осью и одним из звеньев, связанных с кривошипом, в зависимости от параметров механизма, обеспечивающих различие ходов по углу поворота кривошипа;
di+n - расстояние от предыдущей точки отсчета до точки направляющей кривой;
ϕn - угол между осью Х и величиной расстояния между точкой направляющей кривой и предыдущей точкой отсчета.
| RU 99104449 А1, 10.01.2001 | |||
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1998 |
|
RU2158830C2 |
| Способ построения правильных криволинейных поверхностей фюзеляжа и других агрегатов самолета | 1953 |
|
SU719916A1 |
| АКАТОВ Е.И | |||
| и др | |||
| Судовые роторные двигатели | |||
| - Л.: Судостроение, 1967, с.135-156 | |||
| СУХОМЛИНОВ Р.М | |||
| Трохоидные роторные компрессоры | |||
| - Харьков: Вища школа, 1975, с.8-25, 40-59. | |||

