Изобретение относится к машиностроению и может быть использовано в двигателях внутреннего сгорания (тепловых машинах), пневматических устройствах и для мускульных приводов с неравномерным движением рабочих органов. Предлагаемое устройство применимо в автомобильном, водном и воздушном транспорте, в сельском хозяйстве, в строительстве, а также в быту.
Известен дезаксиальный кривошипно-шатунный механизм, содержащий кривошип и ползун с направляющей осью, не проходящей через ось вращения кривошипа, шарнирно соединенные с шатуном [1].
Недостатком известного дезаксиального кривошипно-шатунного механизма является низкий КПД (эффективность) передачи сил на вращательное движение кривошипа по причине не выполнения механизма с определенными параметрами, в пределах которых выявлены ранее не известные для него положительные признаки.
Техническим результатом данного изобретения является повышение КПД (эффективности) механизма.
Повышение КПД (эффективности) достигается тем, что дезаксиальный кривошипно-шатунный механизм выполнен с относительной величиной расстояния между осью перемещения ползуна и центром вращения кривошипа в интервале параметров 0,25<ξ<7,0 и собственным энергетическим параметром механизма:
A(ξ,λ)>const;
где A - собственный энергетический параметр механизма;
ξ - относительная величина расстояния, между осью перемещения ползуна и центром вращения кривошипа;
λ - относительная величина шатуна;
при этом 
где ϕ - угол поворота кривошипа механизма;
ϕ1 - угол первоначального положения кривошипа механизма;
ϕ2 - угол крайнего, предельного положения кривошипа механизма. Увеличение КПД (эффективности) дезаксиального кривошипно-шатунного механизма при передаче сил  на вращательное движение кривошипа характеризуется моментом M на оси O и определяется через углы β, ϕ в зависимости от параметров механизма по Фиг.1. Ход решения задачи аналогичен [2, 3], однако имеет неожиданные результаты.
на вращательное движение кривошипа характеризуется моментом M на оси O и определяется через углы β, ϕ в зависимости от параметров механизма по Фиг.1. Ход решения задачи аналогичен [2, 3], однако имеет неожиданные результаты.
Посредством угла β определяется составляющая силы , направленная вдоль шатуна  . Далее сила
. Далее сила  действует вдоль шатуна на кривошип, при этом разлагается на составляющую
действует вдоль шатуна на кривошип, при этом разлагается на составляющую  , образующую вращающий момент на оси O кривошипа. Сила определяется по выражению:
, образующую вращающий момент на оси O кривошипа. Сила определяется по выражению:
Вращающий момент на оси О кривошипа, вызванный действием силы на ползун, определяется по выражению: 
Посредством углов давления определяется сумма моментов сил на оси кривошипа О, кривошипа ОВ:
 ni=1, 2, 3,...
ni=1, 2, 3,...
где Mi - сумма моментов сил на оси кривошипа;
F - сила, действующая на ползун;
r - длина кривошипа механизма;
β - угол между осью перемещения ползуна и шатуном;
ϕ - угол поворота кривошипа механизма.
Дезаксиальный кривошипно-шатунный механизм по фиг.1 содержит кривошип r, ползун с центром А шарнира с направляющей на расстоянии a от оси O вращения кривошипа, а также шатуна. Поставленная задача повышения КПД (эффективности) решается определением зависимостей величин моментов на оси O кривошипа от длин звеньев дезаксиального кривошипно-шатунного механизма, кривошипа r шатуна l, расстояния a между осью перемещения ползуна и центром вращения кривошипа. Задача сводится к определению функции M(ϕ), для чего угол β выражается через угол поворота ϕ кривошипа. По фиг.1 в системе координат Х и У с помощью вспомогательных отрезков, из прямоугольных треугольников определяются CB=lsinβ, BD=rsinϕ,
тогда a=lsinβ+rsinϕ; отсюда:  для произвольного дезаксиального кривошипно-шатунного механизма. После подстановки в выражение момента получим:
для произвольного дезаксиального кривошипно-шатунного механизма. После подстановки в выражение момента получим:
Для последующей упрощенной оценки результатов принимаем параметры механизма 
 а так же F=1 и r=1. После этого получим следующее выражение:
а так же F=1 и r=1. После этого получим следующее выражение:
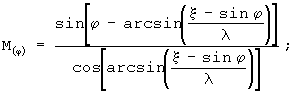
Далее после выполнения преобразований функция единичного момента дезаксиального кривошипно-шатунного механизма, в зависимости от углов поворота кривошипа, имеет вид:

В монографиях (3) автора, это выражение принято, как собственная механическая характеристика механизма. Она не зависит от сил, приложенных к ползуну, и от радиуса кривошипа, а зависит только от линейных параметров дезаксиального кривошипно-шатунного механизма. Для каждого соотношения линейных параметров механизма соответствует только ему присущая собственная механическая характеристика.
Для определения собственного энергетического параметра дезаксиального кривошипно-шатунного механизма выражение суммарных моментов интегрируется в пределах от ϕ1 - первоначального до ϕ2 - крайнего, предельного углов положения кривошипа по Фиг.1 и выражение имеет вид:

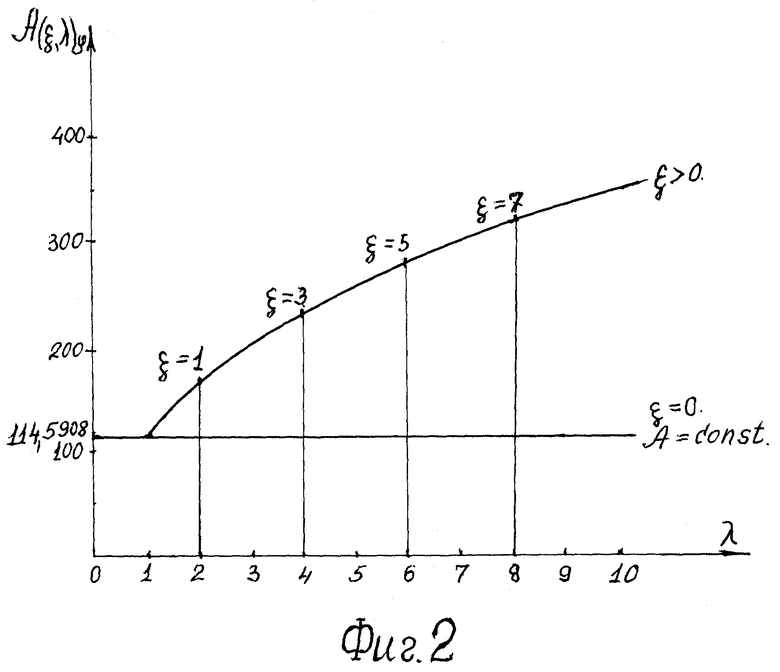
Посредством составления программы для ЭВМ автором получены графики моментов в зависимости от углов поворота кривошипа, для каждого значения линейных параметров дезаксиального кривошипно-шатунного механизма с определением всех значений собственных энергетических параметров в области существования проворачиваемого кривошипа. На Фиг.2 отображено все объективно существующее множество собственных энергетических параметров механизма, которое заключено между константой A(ξ,λ)=114,5908... и кривой ξ>0, A(ξ,λ)>const. По вертикальной оси графика значения собственных энергетических параметров указано при исчислении углов поворота ϕ кривошипа в градусах. Возможна замена поградусного исчисления углов поворота кривошипа на радианные, в этом случае горизонтальной прямой константе при ξ=0 будет соответствовать число два или A(ξ,λ)=2. Расчеты, проведенные с помощью компьютера (ПЭВМ), позволили уточнить значение константы, приведенной впервые в работе (2), которое равно А(ξ,λ)=114,5908... для поградусного исчисления углов поворота кривошипа.
На основании расчетных данных, полученных с помощью ЭВМ для собственных энергетических параметров и анализа по всему полю линейных параметров, приведенных на фиг.2, подобраны оптимальные значения линейных параметров дезаксиального кривошипно-шатунного механизмов, при которых КПД (эффективность) существенно возрастает и объективно сказывается при его промышленном применении. На основании чего автором определено, что предложенный дезаксиальный кривошипно-шатунный механизм выполнен с относительной величиной расстояния между осью перемещения ползуна и центром вращения кривошипа в интервале параметров 0,25<ξ<7,0 и собственным энергетическим параметром А(ξ,λ)>const. После сопоставления всех основных характеристик механизма, полученных с помощью программного обеспечения, автором сделан вывод о нецелесообразности промышленного применения с параметрами ξ<0,25 и ξ>7,0. Общеизвестно, что кривошипно-шатунный механизм предназначен для передачи сил от ползуна на вращательное движение или наоборот. Из вышеизложенных полученных автором материалов можно сделать следующие выводы:
1. Центральный кривошипно-шатунный механизм или дезаксиальный кривошипно-шатунный механизм с относительной величиной расстояния между осью перемещения ползуна и центром вращения кривошипа в интервале параметров 0<ξ<0,25 целесообразно промышленно применять для устройств второго случая, т.е. для устройств, предназначенных для преобразования вращательного движения кривошипа в поступательное движение ползуна. Это обосновывается тем, что собственный энергетический их параметр равен или близок к константе, и КПД (эффективность) устройств на их основе не увеличивается и почти не зависит от линейных параметров механизма.
2. Дезаксиальный кривошипно-шатунный механизм с относительной величиной расстояния между осью перемещения ползуна и центром вращения кривошипа в интервале параметров 0,25<ξ<7,0 и собственным энергетическим параметром A(ξ,λ)>const целесообразно промышленно применять в основном в устройствах для передачи сил от ползуна на вращательное движение кривошипа, для примера, только за счет промышленного применения дезаксиального кривошипно-шатунного механизма автора в поршневых ДВС (тепловых машинах) можно, как минимум, удвоить их КПД и обеспечить их экологическую совместимость. С помощью программного обеспечения на ЭВМ, для дезаксиального кривошипно-шатунного механизма автора выявлены ранее не известные качества при передаче сил на вращательное движение, в особенности для сил, изменяющихся по гиперболической зависимости.
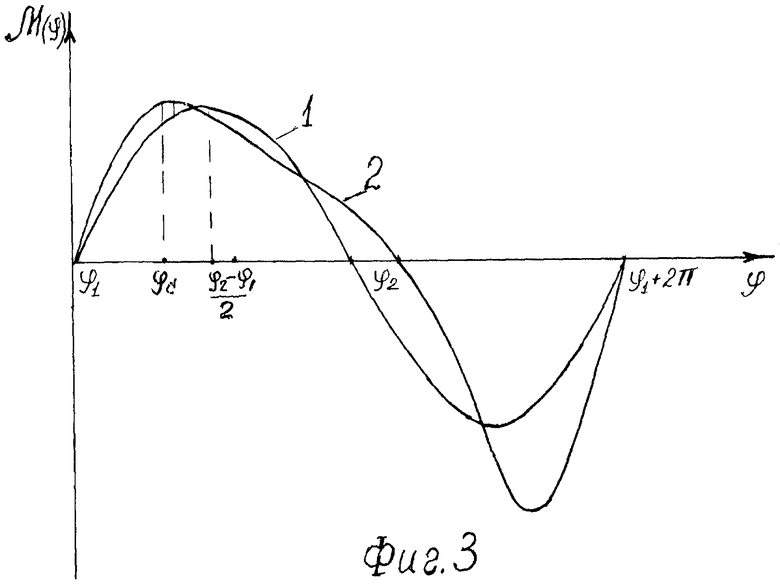
Объективно собственная механическая характеристика имеет возможность смещения амплитуд, относительно половины хода ползуна (рабочего органа), в зависимости от линейных параметров механизма, что дает преимущества при передаче сил расширяющихся газов на вращательное движение кривошипа (4). На Фиг.3 по компьютерной распечатке представлены виды функций M(ϕ) для ξ=0, λ=2,0 - график 1 и для ξ=0,75, λ=2,0 - график 2. Амплитуда положительного момента дезаксиального кривошипно-шатунного механизма смещена влево от половины хода ползуна, по углу поворота кривошипа.
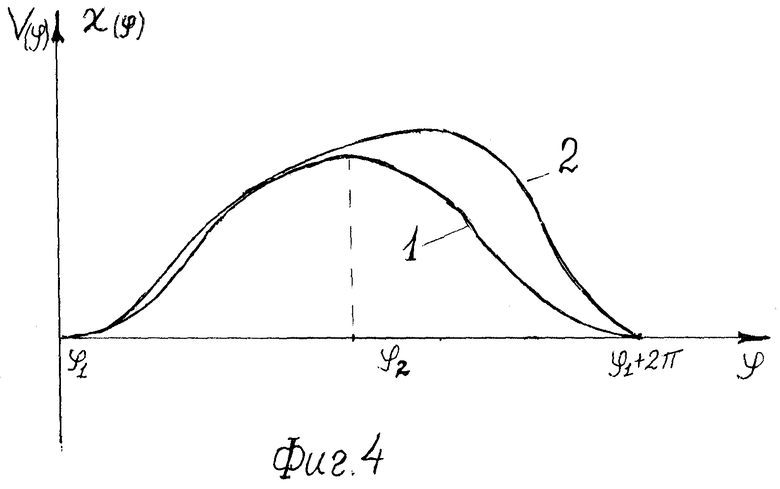
Реальное несимметричное изменение перемещения ползуна или несимметричное изменение рабочего объема двигателя внутреннего сгорания (тепловой машины) относительно половины хода (рабочего органа, поршня) ползуна по углу поворота кривошипа, а также изменение рабочего объема по степенной зависимости, что дает возможность повысить термический КПД ДВС [5, 6]. Это объективная возможность обеспечения работы ДВС (тепловых машин) по циклу автора при промышленном производстве поршневых двигателей. На Фиг.4 изображены графики изменения рабочих объемов двигателей внутреннего сгорания (тепловых машин) по компьютерной распечатке программного обеспечения. График 1, для сравнения, соответствует центральному кривошипно-шатунному механизму с параметрами ξ=0, и λ=2,0 - при этом имеет форму слизкой к синусоиде. График 2 соответствует дезаксиальному кривошипно-шатунному механизму с параметрами ξ=0,76 и λ=2,0 - при этом имеет форму, в основной части, зависимости, близкой к  , где y - вертикальная ось декартовых координат или V(ϕ) - рабочий объем двигателя, а x - горизонтальная ось координат, перемещение (поршня) ползуна.
, где y - вертикальная ось декартовых координат или V(ϕ) - рабочий объем двигателя, а x - горизонтальная ось координат, перемещение (поршня) ползуна.
Уменьшение габаритов ДВС тепловых машин по оси перемещения ползуна (поршня) до 15 процентов, по сравнению с центральным кривошипно-шатунным механизмом.
Увеличение рабочего объема ДВС (тепловых машин) за счет хода (поршня) ползуна, при одном и том же диаметре поршня и длине шатуна, по сравнению с центральным кривошипно-шатунным механизмом по Фиг.4.
В дезаксиальном кривошипно-шатунном механизме с увеличением расстояния между осью перемещения ползуна и центром вращения кривошипа, при фиксированных практически необходимых длинах шатуна, происходит увеличение угла давления β на ось перемещения ползуна и КДД (эффективность) механизма происходит в основном за счет "расклинивания". И это единственный в своем роде уникальный механизм, обладающий свойством кривошипной динамической линзы (лупы), способный сконцентрировать поступательные силы на вращательное движение, на вращательный момент.
На Фиг.1 изображена кинематическая схема дезаксиального кривошипно-шатунного механизма. Он содержит кривошип 1, ползун с центром шарнира А, с направляющей СА, не проходящей через ось вращения О кривошипа, и размещенной на расстоянии а, шарнирно соединенные шатуном 2. Прерывистыми линиями показаны крайние положения механизма, с первоначальным положением кривошипа под углом ϕ1, и с предельным положением кривошипа под углом ϕ2, при произвольном положении кривошипа - ϕ. Шатун 2 показан размещенным под углом β к оси перемещения ползуна, доказаны силы , , , непосредственно участвующие при выводе формул, без смежных составляющих, во избежание загромождений чертежа. Приведены необходимые вспомогательные отрезки, необходимые при выводе формул. Механизм показан в декартовой системе координат y и x совмещенным в точке O с центром вращения кривошипа. Точка B является центром шарнира соединения кривой шипа и шатуна.
На Фиг.2 изображено поле значений собственных энергетических параметров в зависимости от линейных параметров кривошипно-шатунных механизмов. Кривая ξ>0 является наибольшей по собственным энергетическим параметрам с указанием предельных значений ξ=1, ξ=3, ξ=5, ξ=7. Горизонтальная прямая константы A=114,5908, при ξ=0 является нижним предельным значением собственных энергетических параметров для всех кривошипно-шатунных механизмов с осью перемещения ползуна проходящей через ось вращения кривошипа. Все множество возможных собственных энергетических параметров дезаксиальных кривошипно-шатунных механизмов вмещается между кривой ξ>0 и горизонтальной константой A=const и может быть предъявлено вместе с программным обеспечением для ЭВМ. Вертикальная ось декартовых координат показывает А(ξ,λ) собственные энергетические параметры в поградусном исчислении углов поворота кривошипа механизма, а горизонтальная ось отображает относительные величины шатуна λ.
На Фиг.3 изображены графики зависимостей М(ϕ) моментов от углов поворота кривошипа 1 - для центрального кривошипно-шатунного механизма с параметрами ξ=0, λ=2,0 и 2 - для дезаксиального кривошипно-шатунного механизма с параметрами ξ=0,75, λ=2,0. На горизонтальной оси ϕ показаны ϕ1 - первоначальное и ϕ2 - предельное, крайнее значения углов поворота кривошипа.
На фиг.4 изображены графики зависимостей перемещение ползуна или единичных рабочих объемов, к примеру ДВС, при площади поршня, равном единице, в зависимости от углов поворота кривошипа. Кривая 1 показана для центрального кривошипно-шатунного механизма с линейными параметрами ξ=0, λ=2,0 и имеет симметричный и синусоидальный вид. Кривая 2 показана для дезаксиального кривошипно-шатунного механизма с параметрами ξ=0,75 и λ=2,0 и имеет вид преимущественно степенной зависимости с показателем степени больше нуля, но меньше единицы. На вертикальной оси графика обозначены перемещения перемещения ползуна по Фиг.1 по оси x от правого начального положения до предельного положения или по углам поворота кривошипа от ϕ1 до ϕ2 или единичные рабочие объемы ДВС. На горизонтальном оси ϕ показаны ϕ1 - первоначальное и ϕ2 - предельное значения углов поворота кривошипа.
Собственный энергетический параметр - это есть характеристика дезаксиального кривошипно-шатунного механизма автора и означает возможность передачи сил, приложенных к ползуну и направленных вдоль шатуна на вращательное движение кривошипа. Этот параметр (характеристика) не зависит от величины приложенных сил, а зависит только от ξ и λ - линейных параметров механизма и каждому соотношению параметров (линейных) механизма соответствует только ему присущее значение собственного энергетического параметра. Для центрального кривошипно-шатунного механизма собственный энергетический параметр не зависит от относительной величины шатуна и равен минимально возможному значению - константе.
Современное состояние промышленного применения кривошипно-шатунных механизмов в целом, к примеру в ДВС, с учетом вышеизложенных ранее не известных знаний, говорит о неправильном их использовании, если учесть существующие мировые энергетические, экологические и экономические проблемы.
Механизм работает следующим образом. Под действием силы Фиг.1 происходит перемещение точки А1 и В1 механизма в положение А2 и В2.Соответственно при перемещении кривошипа r против часовой стрелки из первоначального положение ϕ1 в конечное, предельное положение ϕ2, происходит рабочий ход или максимальная передача силы для образования суммарного момента на оси О кривошипа в соответствие с собственным энергетическим параметром при определенных линейных параметрах дезаксиального кривошипно-шатунного механизма автора. Затем из положения ϕ2 в положение ϕ1 кривошипа происходит обратный ход, также против часовой стрелки, сила при этом не действует, т.е. точка А2 механизма возвращается в первоначальное положение. Затем этот цикл повторяется.
Предлагаемый дезаксиальный кривошипно-шатунный механизм автора соответствует критериям изобретения, является новым, имеет изобретательские уровень и промышленно применим.
Источники информации
1. И.И.Артоболевский, "Механизмы в современной технике", Справочное пособие, том 2, стр.437, механизм №1405, М.: Наука, 1979 г.
2. М.O.Яримов, Патент РФ №2043550,"Четырехзвенный шарнирный кривошипно-коромысловый механизм автора", 1991 г.
3. М.О.Яримов "Тепловые машины, механика", ООО "Виртуал", г.Дюртюли, 2001 г., (Монография направлена в ФИПС для ВПТБ).
4. М.О.Яримов, Патент РФ №2154174, "Способ работы ДВС", 1998 г.
5. М.О.Яримов, Патент РФ №2135793, "Способ работы ДВС", 1999 г.
6. М.О.Яримов, Патент РФ №2160373, "Способ работы ДВС по циклу автора", 1999 г.
Изобретение относится к области машиностроения и может быть использовано в двигателях внутреннего сгорания, пневматических устройствах и мускульных приводах. Дезаксиальный кривошипно-ползунный механизм содержит кривошип и ползун с направляющей, не проходящей через ось вращения кривошипа, шарнирно соединенные с шатуном. Механизм выполнен с относительной величиной расстояния между осью перемещения ползуна и центром вращения кривошипа в интервале параметров 0,25<ξ<7,0 и собственным энергетическим параметром механизма: А(ξ,λ)>const.
где А - собственный энергетический параметр механизма;
ξ - относительная величина расстояния между осью перемещения ползуна и центром вращения кривошипа;
λ - относительная величина шатуна;
при этом 
где ϕ - угол поворота кривошипа механизма;
ϕ1 - угол первоначального положения кривошипа механизма;
ϕ2 - угол крайнего, предельного положения кривошипа механизма. Технический результат заключается в увеличении КПД. 4 ил.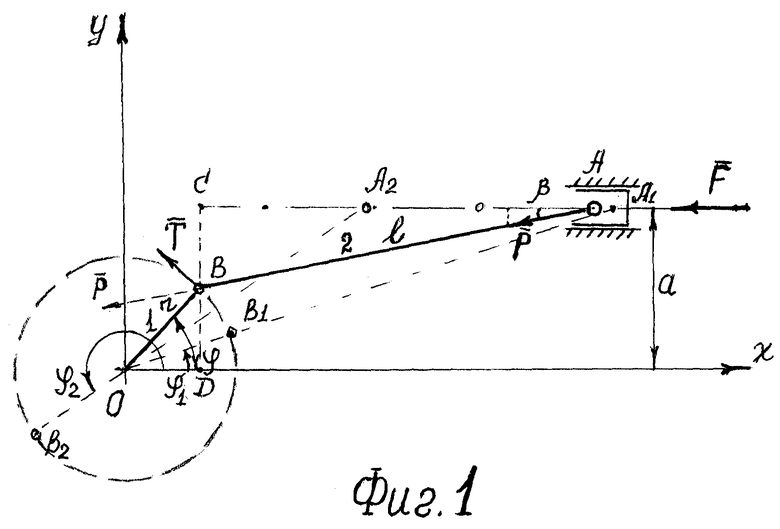
Дезаксиальный кривошипно-ползунный механизм, содержащий кривошип и ползун с направляющей, не проходящей через ось вращения кривошипа, шарнирно соединенные с шатуном, отличающийся тем, что механизм выполнен с относительной величиной расстояния между осью перемещения ползуна и центром вращения кривошипа в интервале параметров 0,25<ξ<7,0 и собственным энергетическим параметром механизма
А(ξ,λ)>const, где А - собственный энергетический параметр механизма; ξ - относительная величина расстояния между осью перемещения ползуна и центром вращения кривошипа; λ - относительная величина шатуна,
при этом 
где ϕ - угол поворота кривошипа механизма;
ϕ1 - угол первоначального положения кривошипа механизма;
ϕ2 - угол крайнего, предельного положения кривошипа механизма.
| КОЖЕВНИКОВ С.Н., Теория механизмов и машин | |||
| - М.: Машиностроение, 1969, с.78, рис.3.6 | |||
| Кривошипно-ползунный дезаксиальный механизм | 1988 |
|
SU1613751A1 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| JP 59231255, 25.12.1984. | |||

