Изобретение относится к контролю объектов, составленных из различных компонентов, и может быть использовано для контроля жидких фракций.
Известно устройство для контроля объектов, содержащее средство для получения потока объектов, установленную в этом потоке поверхность (плоский элемент), приспособленную к приему осадка из этого потока, и оптически связанное с указанной поверхностью средство для контроля изображения упомянутого осадка [1] Однако производительность контроля этим устройством недостаточная, для повышения которой отдельные объекты транспортируются по каналу посредством воздушного потока, вызываемого разрежением, и станции оптического измерения, где оптически измеряются характеристики объектов и получают оптические информационные события. От станции оптического измерения объекты за счет всасывания проходят через канал к устройству получения физического отображения, где сопло направляет эти объекты на соответствующий фильтр (поверхность, приспособленную к приему осадка). С противоположной от сопла стороны фильтра помещается всасывающая труба, которая втягивает воздух, поступающий из фильтра, и для достижения требуемого всасывания с трубой соединяется всасывающий насос. По мере того, как воздух выходит из сопла, проходит через фильтр и уходит по всасывающей трубе, на фильтре оседают объекты. Поэтому здесь термины "физические отображения" и "фильтрующее отображение" являются взаимозаменяемыми.
Имеется приводной механизм для перемещения сетчатого фильтра относительно сопла по какому-либо рисунку для осаждения объектов на фильтре согласно этому рисунку и создания фильтрующего отображения.
Используется компьютер, подсоединенный для приема и регистрации оптической информации, поступающей от оптической измерительной станции в функции времени, кроме того, он подсоединяется для регистрации положения сопла в функции времени. В результате на фильтре получают отображение с простановкой времени. В компьютере предусматривается фактор или коэффициент коррекции, указывающий на время, которое требуется объектам на перемещение от оптической измерительной станции к фильтру, за счет использования этого фактора компьютер коррелирует оптическую информацию с позициями, полученными на фильтрующем отображении. Коррелированные данные запоминаются компьютером и используются им по необходимости или индицируются.
Предусматриваются датчики для восприятия характеристики объектов на фильтрующем отображении в функции позиции отображения. В предпочтительном варианте реализации близ сопла помещается первая камера, а близ всасывающей трубы помещается вторая. С помощью шаговых двигателей и подвижных столиков сетчатый фильтр перемещается по направлениям Х и Y относительно сопла, всасывающей трубы и двух камер. Между компьютером и шаговыми двигателями предусматривается система регулирования, благодаря которой компьютер точно регулирует положение сетчатого фильтра, при этом в компьютер поступают данные о положении сопла и камер. С помощью этой информации компьютер программируется на управление шаговыми двигателями, заставляя фильтр перемещаться по реверсивному растру с тем, чтобы объекты оседали на фильтр параллельными рядами. Кроме того, компьютер программируется на перемещение этих рядов в поле зрения камер. Желательно, чтобы камеры размещались относительно сопла таким образом, чтобы они просматривали ряд через два ряда после сопла по мере того, как на фильтр оседают объекты. Следовательно, камеры по мере осаждения объектов осматривают ранее осажденный ряд. Таким образом, процесс осаждения рядов также используется для сканирования камерами. По мере сканирования камер в компью- тере запоминаются видеоизображения, они корректируются с той позицией отображения, которую осматривают камеры, и, кроме того, с позициями отображения коррелируются запомненные в компьютере оптические данные. В результате осуществляется перекрестная корреляция оптических данных, видеоизображений и позиций отображения, при этом любая информация может быть выведена в функции двух других.
В другом варианте реализации в качестве фильтрующего отображения может применяться круглый цилиндр, на котором получается спиральный рисунок.
Поскольку физическое отображение можно сохранять, то видео и иные измерения можно проводить позднее.
На фиг.1 представлено схематическое изображение системы для контроля объектов; на фиг. 2 схематический перспективный вид устройства для получения фильтрующего отображения; на фиг.3 схематичный вид сбоку устройства для получения отображения объектов; на фиг.4 вид сверху подвижных столиков, перемещающих фильтрующее отображение; на фиг.5 вид сбоку, на котором изображено сопло и камеры; на фиг.6 вид в разрезе, на котором изображены сопло и всасывающая труба; на фиг.7 схематичный вид сверху плоского фильтрующего отображения; на фиг. 8 фотография отображения; на фиг.9 схематичный вид устройства для получения цилиндрического отображения; на фиг.10 схема кардочесальной машины.
На фиг.1 изображено устройство 10 для контроля объектов, в нем в сепаратор 14 подается проба 12. Проба 12, к примеру, может состоять из хлопка-сырца, содержащего хлопковые волокна и посторонние вещества вроде узелков и сорных примесей, поэтому сепаратор 14 осуществляет классификацию волокон и узелков и подает их по всасывающему каналу 18 на оптическую измерительную станцию 20. Желательно, чтобы сепаратор 14 отделял большую часть сорных примесей до того, как отдельные объекты подаются в канал 18, однако возможны и иные варианты реализации, когда сепаратор выполняется так, чтобы подавать отдельные объекты сорных примесей в канал 18.
Для управления работой сепаратора 14 применяется панель управления 16, где содержится компьютер, совместимый с IBM BT, связь осуществляется по линиям управления 15. Аналогичным образом панель управления 16 соединяется линиями 22 с измерительной станцией 20 для управления ее работой и для приема информации от нее. В предпочтительном варианте реализации сепаратор 14, панель управления 17 и оптическая измерительная станция 20 представляют собой части типовой машины, продаваемой фирмой Цельверег Устер, канал имеет диаметр в полдюйма, а воздушный поток составляет 3,9 кубических фута в минуту.
По мере того, как воздух вместе с объектами проходит через оптическую измерительную станцию 20, объекты освещаются источником света и проводятся самые различные оптические измерения, в их число могут входить измерение величины и продолжительности рассеяния вперед, рассеяния назад и ослабления света. Для каждого объекта, проходящего через оптическую измерительную станцию 20, получают набор оптических данных. Получаемые электрооптические события, в число которых входит и время их появления, передаются к панели управления 16 на компьютер, где они запоминаются в функции времени. Иными словами, в компьютере оптические данные хранятся вместе с временем, при котором они были получены.
После того, как объекты выходят из оптической измерительной станции 20, они с потоком воздуха движутся по каналу 24 в герметизированную камеру 26, она представляет собой часть устройства для получения фильтрующего отображения 27. Объекты выбрасываются соплом 28 и направляются на фильтр 30, при исследовании хлопка желательно, чтобы фильтр состоял из нейлоновой сетки. Диаметр нитей составляет приблизительно 18 мкм и в фильтре нити разделяются в одной размерности расстоянием в 1 мм, в перпендикулярной размерности они поочередно разделяются расстоянием в 1,0 мм, затем в 0,25 мм. Фильтрующая среда, использованная в фильтре 30, должна перестраиваться в зависимости от физических свойств исследуемых объектов. Фильтр 30 предназначается для получения поверхности для осаждения объектов и в ряде случаев в качестве подходящей поверхности может применяться сплошная поверхность или бумага. Поэтому используемый здесь термин "фильтр" не обязательно означает, что через него проходит текучая среда. Наиболее существенной его особенностью является то, что на нем оседают объекты.
Под фильтром 30 и сразу под соплом 28 находится всасывающая труба 32, соединяемая со всасывающим насосом 34, обеспечивающим вакуум или всасывание, увлекающее объекты на сепаратор 14 через измерительную станцию 20, через сопло 28 и в ситовый фильтр 30. При работе с хлопковой пробой фильтр 30 захватывает более 99% массы волокон.
Панель управления 16 служит для управления работой устройства фильтрующего отображения 27 по линиям 36, и, кроме того, к ней по линиям 36 поступают данные, о чем более подробно будет рассказано далее. Аналогичным образом панель управления 16 управляет работой насоса 34 по линиям 38.
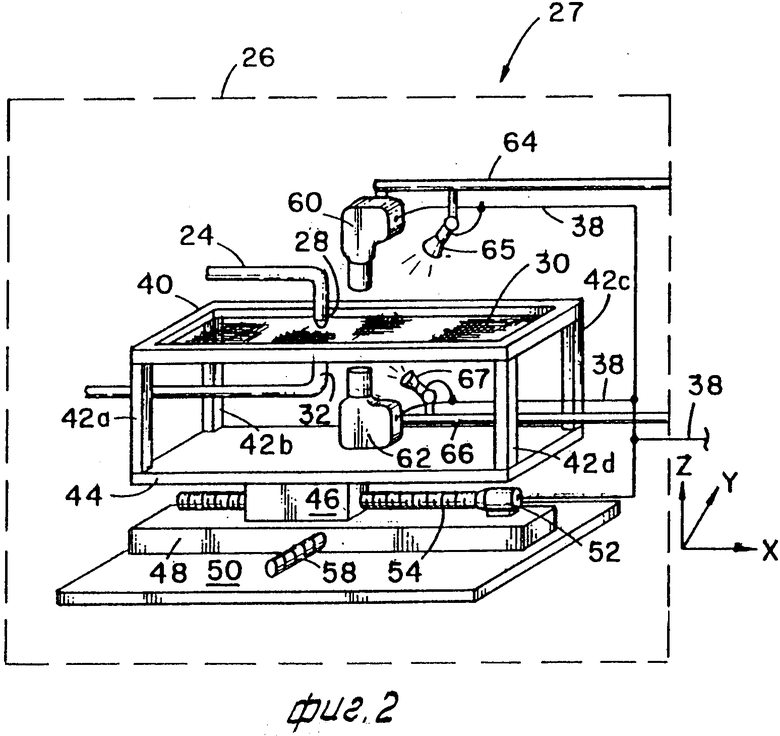
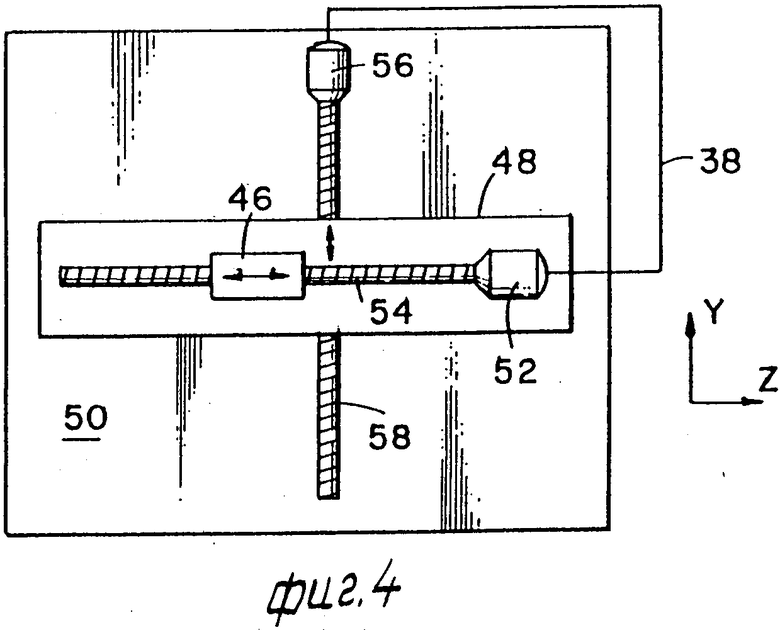
На фиг.2, 3 и 4 более подробно изображено устройство 27. На раму 40 плотно натянута нейлоновая сетка 30, при этом ножки 42а рамы направлены вниз и опираются на платформу 44, в результате чего рама 40 с фильтром 30 находится в приподнятом положении над платформой 44, снизу платформа 44 скреплена с подвижным столиком 46, который может перемещаться на приводном столике 48, а тот в свою очередь в своем движении может опираться на опорный столик 50. Использован шаговый двигатель 52, он вместе с ходовым винтом 54 приводит в движение столик 46 в направлении Х (влево и вправо на фиг. 2, 3 и 4) под управлением от компьютера 16, имеется другой аналогичный шаговый двигатель 56 с ходовым винтом 58, который приводит столик 48 в движение в направлении оси Y (к нам и от нас на фиг.2 и 3) по командам от компьютера 16. Желательно, чтобы столики 46, 48 и 50 были механически взаимосвязаны с помощью роликовых подшипников, обеспечивающих их свободное перемещение, однако вполне можно ограничиться салазочным перемещением. Итак, в данной конструкции фильтр 30 перемещается относительно сопла 28 и всасывающей трубки 32, и по мере того, как объекты выходят из сопла 28, они оседают на фильтре 30 по любой желаемой картине.
На фиг. 2, 3 и 5 показаны две камеры 60 и 62, расположенные на стойках 64 и 66 неподвижно относительно сопла 24 и всасывающей трубы 32. Как видно из поля обзора, очерченного линиями 68 и 70 на фиг.5, камера 60 осуществляет осмотр фильтра 30 сверху после сопла 28, а камера 62 снизу фильтра 30 близ всасывающей трубы 32. Источники света 65 и 67 освещают верхнюю и нижнюю поверхности фильтра 30, в том числе и поле обзора камер 60 и 62. Камеры 60 и 62 и источники света 65 и 67 могут работать в любом желаемом диапазоне спектра видимом или невидимом. В ряде случаев для исследования таких свойств волокон, как содержание сахара, содержание влаги, тип посторонних веществ и т. д. возможно применение камер и источников света ближнего инфракрасного диапазона.
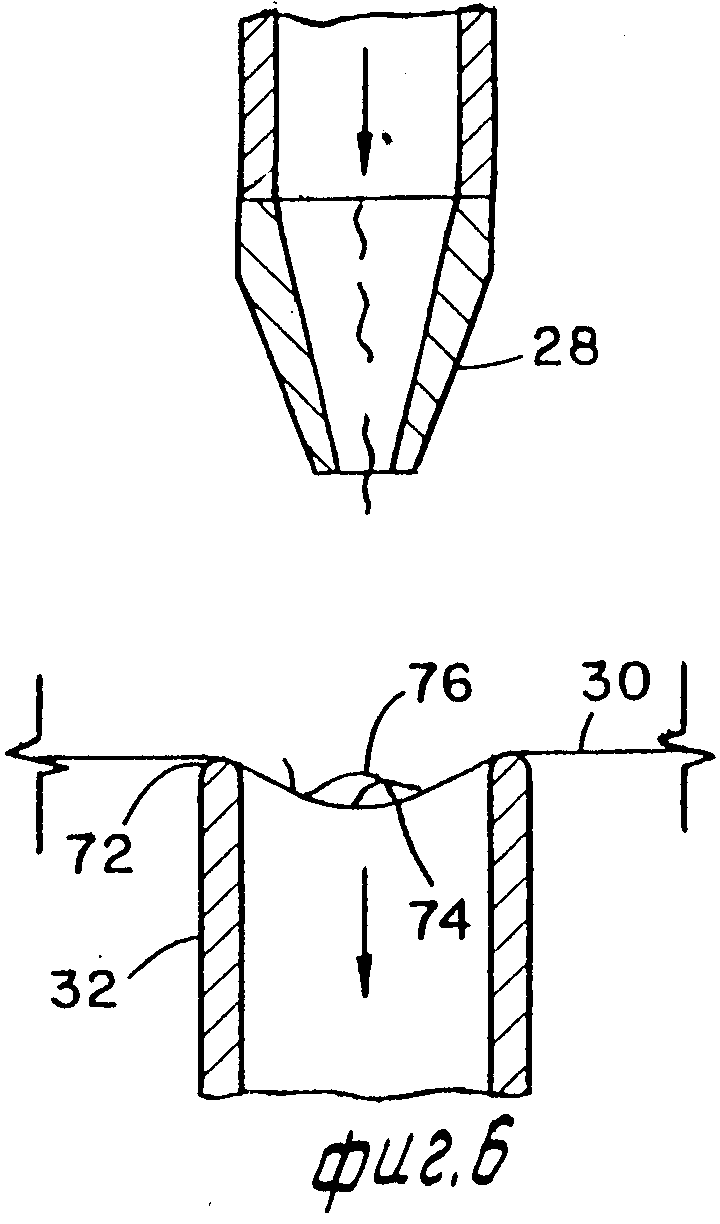
Теперь обратимся к фиг. 6, на которой в разрезе изображены сопло 28, всасывающая труба 32 и фильтр 30. В предпочтительном варианте реализации выпуск сопла 28 имеет диаметр 4,85 мм, тогда как впуск сопла имеет диаметр 12,6 мм при длине 90 мм. Предпочтительный диаметр всасывающей трубы равен 12,7 мм, причем ее зев 72 округлен. Предпочтительное расстояние между соплом 28 и верхом трубы 32 составляет приблизительно 16 мм, если всасывание отключено, то фильтр 30 размещается приблизительно на 5 мм выше зева 72 трубы 32. Если же вакуумный насос 34 включен, то ситовый фильтр 30 оттягивается книзу к зеву 72 трубы 32 и образует внутри него вогнутую поверхность 74. Подобная форма способствует концентрации и осаждению объектов 76 в требуемом положении на ситовом фильтре 30. Поскольку фильтр 30 движется относительно всасывающей трубы 32, то различные участки фильтра 30 втягиваются в трубу 32, а затем выходят из зева 72. Заметим, что при нахождении внутри зева 72 трубы 32 фильтр 30 растянут, что увеличивает размер отверстий в сетке. Когда сетка отходит от зева 72, начальный размер отверстий восстанавливается, обеспечивая защемляющее действие для захваченных объектов 76.
Теперь обратимся к фиг.7, на которой изображен предпочтительный рисунок, образуемый объектами 76 на фильтре 30. Для большей наглядности на фиг.8 представлена фотография типового фильтра 30 и отображения на нем. Желательно, чтобы фильтр 30 перемещался шаговыми двигателями 52 и 56 под управлением от панели управления 16 для осаждения отдельных объектов 76 в виде реверсивного растра или извилистого рисунка из рядов 78-94, где первым является ряд 78, а последним ряд 94. Число рядов может быть любым, поскольку фильтр 30 движется для осаждения объектов 76, то компьютер регистрирует позиции отображения на фильтре 30. Подобные позиции отображения могут представлять собой координаты Х и Y, однако предпочтительней единственное число, указывающее на линейное положение вдоль непрерывных рядов 78-94. Если, например, расстояние от начала 96 ряда 78 до конца 98 ряда 94 разделить на 1000 сегментов, то с каждым сегментом согласуется некоторая позиция отображения. У начала 96 находится первый сегмент, представляющий положение отображения 1. Близ конца 98 находится последний сегмент, обозначающий положение отображения 1000. Поэтому каждый из 1000 сегментов в рядах 78-94 и соединениях 78а-92а однозначно идентифицируется единственным номером позиции отображения.
По мере того, как объекты 76 осаждаются на фильтр 30, образуя рисунок, представленный на фиг. 6, в компьютере на панели управления 16 в функции осуществляется запоминание номера отображения. Запоминание позиции отображения в соответствии с конкретным временем можно назвать простановкой времени на положениях объектов. Напомним, что оптические данные, поступающие от измерительной станции 20, также регистрировались в функции времени, и поэтому позицию отображения можно откорректировать с оптическими данными с учетом того факта, что на перемещение волокон от измерительной станции 20 для фильтра 30 уходит некоторое время.
В предпочтительном варианте реализации перемещение волокон от станции 20 до фильтра 30 занимает 69 мс, а потому к времени, хранимому для каждого набора оптических данных, добавляется еще 60 мс. За счет использования фактора коррекции в 60 мс оптические данные напрямую коррелируются с позициями отображения от 1 до 1000 путем увязки соответствующих моментов времени.
Из фиг. 5 и 7 видно, что камеры 60 и 62 размещаются относительно сопла таким образом, что они осматривают объекты в ряду, удаленном на два ряда от того ряда, где в данный момент идет осаждение. Так, если идет осаждение в рядах 78 и 80, то камеры не увидят ничего. Если осаждается ряд 82, то камеры 60 и 62 станут сканировать ряд 78. Когда ряд 84 будет осажден, камеры начнут осматривать ряд 80. Итак, по мере осаждения объектов 78 на фильтр они сканируются камерами 60 и 62. После осаждения последнего ряда (ряд 94) камеры 60 и 62 произведут еще два скана, осматривая ряды 92 и 94.
Возможен и иной вариант реализации, когда после завершения осаждения объектов во всех рядах фильтра 30 и перемещений под управлением от панели камеры 60 и 62 будут отслеживать путь сопла 28 по фильтру 30.
Вне зависимости от того, как именно камеры сканируют фильтр 30, от них получают последовательность изображений, увязанных с позициями отображения, и хранят в компьютере в цифровом виде. Если, к примеру, камеры 60 и 62 осматривают позицию отображения 1, то в соответствии с позицией 1 запоминаются изображения 1а и 1b. Когда камеры 60 и 62 осматривают позицию отображения 2, то в связи с позицией 2 запоминаются изображения 2а и 2b и т.д. Поскольку оптические данные уже были скоррелированы с позициями отображения, то полученные изображения можно откоррелировать с оптическими данными, ранее запомненными в компьютере. Таким образом, для каждого конкретного изображения можно вызвать соответствующие оптические данные, либо для имеющегося конкретного набора оптических данных можно вызвать изображение позиции отображения. Хранение информации в такой форме позволяет перепроверять и/или калибровать оптические измерения относительно изображений по местоположениям. Если, к примеру, известно, что узелки в хлопковой пробе обладают идентифицируемыми оптическими свойствами, то с помощью компьютера в машине АР1 можно типовыми методами проанализировать оптическую информацию и найти данные, указывающие на присутствие узелков. Как только при помощи оптических данных происходит идентификация узелка, оператор может вызвать и просмотреть соответствующее изображение отображающей позиции на фильтре 30, тогда оператор может визуально исследовать каждый узелок, осевший на фильтре 30 в соответствующем местоположении. В качестве варианта компьютер может проанализировать изображение в этом местоположении, чтобы убедиться, что размеры и форма типичны для узелка. Благодаря этому осуществляется контроль оптических данных по запомненным изображениям отображающих позиций.
Заметим, что изображенное на фиг.7 отображение уже представляет зарегистрированную визуальную информацию. Вместо того, чтобы пользоваться запомненными изображениями отображающих позиций, само отображение может применяться для контроля точности оптической информации. Если, к примеру, в ходе компьютерного анализа обнаруживается какой-либо набор оптических данных, указывающих на наличие узелка, то определяется его соответствующая отображающая позиция и фильтр 30 перемещается так, чтобы эта отображающая позиция оказалась в поле зрения камер 60 и 62. Тогда компьютер либо оператор осматривает и анализирует изображение, поступающее от камер, и перепроверяет наличие узелка. Как только желаемая позиция локализована, можно произвести любое измерение по интересующим объектам с помощью самых разных инструментов.
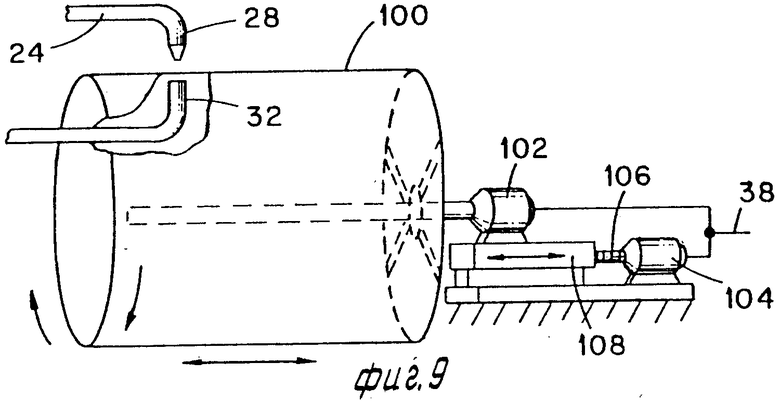
На основании вышеизложенного можно сделать вывод, что данным изобретением обеспечивается создание нового способа представления объектов для измерений или анализа, для контроля и запоминания информации, полученной по характеристикам этих объектов, а также способ точной проверки измерений, проводимых другими измерительными приборами. Изобретение было рассмотрено на одном из предпочтительных вариантов реализации, однако следует иметь в виду, что этим вариантом изобретение не ограничивается, для чего служат лишь пункты формулы изобретения. Так, к примеру, на фиг.9 изображен цилиндрический фильтр 100, являющийся одним из вариантов конструкции фильтра 30. В варианте по фиг. 9 фильтр 100 может вращаться вокруг оси с помощью двигателя 102, тогда как двигатель 104 вращает ходовой винт 106 для перемещения ползуна 108 и фильтра 100 в направлении, параллельном оси цилиндрического фильтра 100. Таким образом, при движении фильтра 100 на нем по спирали из седла 28 осаждается спиральный рисунок или отображение объектов, причем простановка времени производится так же, как было описано выше в связи с фильтром 30.
На фиг. 10 изображен еще один вариант реализации, где показано, каким образом устройство для получения отображения может применяться в существующем станке при условии соответствующей модификации. Представленное на фиг.10 устройство 110 представляет собой модифицированную кардочесальную машину, где питающий столик 114 и подающий ролик 116 подают слой хлопка к приемному барабану 118, который в свою очередь подает хлопок к главному барабану 120 чесальной машины. Главный барабан 120 взаимодействует со шляпками 122 и съемным барабаном 124, в результате чего хлопок 112 превращается в тонкий слой, поступающий на плющильные валки 126. Подобная конструкция является обычной, она широко применяется на многих хлопкоперерабатывающих фабриках.
Компьютер 116 принимает сигналы обратной связи от приводных механизмов приемного барабана 118, главного барабана 120, съемного барабана 124 и валков 126 и подает на них сначала сигналы управления, что показано линиями управления и обратной связи 126, подсоединенными между этими элементами и компьютером 116. Предусмотрены датчики, контролирующие ход хлопка 112 по питающему столику 114, между съемным барабаном 124 и валками 126 и после этих валков. В качестве таких датчиков предпочтительно применять видеокамеры 130, 132, 134. Видеокамеры соединяются линиями 126 с компьютером 116, где имеются соответствующие аналого-цифровые преобразователи для преобразования аналоговых видеосигналов в цифровой форме, цифровая видеоинформация запоминается в компьютере. Поскольку компьютер 116 запоминает видеоинформацию, то на ней проставляется время. Иными словами, в компьютере запоминается каждое изображение от видеокамер 130, 132 или 134, и в связи с ним указывается время, когда это видеоизображение было получено. Компьютер 116 постоянно контролирует механическую скорость устройства 110, при этом высчитывается время, за которое хлопок переместится от зоны обзора камеры 130 к зоне обзора камеры 132 и далее к зоне обзора камеры 134. Как только задержка во времени рассчитана, можно скоррелировать цифровые изображения от трех камер, пользуясь проставленным временем так, как было описано выше в связи с другими вариантами реализации. Как только информация от трех камер откоррелирована, компьютер программируется на вызов, индикацию и анализ запомненных изображений.
На фиг. 9 и 10 представлены различные варианты реализации изобретения, однако следует иметь в виду, что изобретение допускает различные замены и вариации деталей, не выходящие за пределы охвата формулы изобретения.






Изобретение относится к контролю объектов и может быть использовано для контроля потока объектов, движущихся в пространстве. На пути потока установлена поверхность для принятия осадка из этого потока. Изображение этого осадка воспроизводится электронно-оптическим блоком, на выходе которого включен компьютер для анализа этого изображения. 2 з.п. ф-лы, 10 ил.
| Способ определения счетной концентрации монодисперсного аэрозоля | 1983 |
|
SU1149142A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
