Изобретение относится к электронному машиностроению, а более конкретно к захватам манипуляторов, работающих в чистых помещениях, преимущественно в производстве изделий электронной техники.
Известен захват манипулятора, содержащий губки, связанные с приводом упругим элементом [1]
Недостатком известного захвата является ненадежное удержание детали при внезапном отключении привода, а также невозможность регулирования усилием захвата и удержания детали.
Наиболее близким по технической сущности и достигаемому результату к изобретению является захват манипулятора [2] содержащий корпус с установленным на нем изогнутым упругим элементом, и зажимные губки, расположенные на изогнутом упругом элементе и связанные посредством него с приводом их перемещения, имеющим подпружиненный относительно его корпуса шток.
Недостатком известного захвата манипулятора является малая надежность захвата и удержания детали, так как положение губок в пространстве определяется положением, формой и размерами зажимаемой детали и при зажиме захват упирается в деталь вершиной выпуклой части плоской пружины. Также в известном устройстве отсутствует возможность регулирования усилием захвата и удержания детали.
Задача изобретения повысить надежность захвата и удержания детали при возможности регулирования усилия захвата и удержания.
Это решается тем, что захват манипулятора снабжен источником сжатого воздуха, а изогнутый упругий элемент выполнен в виде манометрической пружины плоскоовального сечения с герметизированными концами, расположенной выпуклой поверхностью к штоку и связанной с ним, при этом полость манометрической пружины связана с источником сжатого воздуха, а привод перемещения выполнен в виде электромагнита, причем шток выполнен в виде сердечника электромагнита и подпружинен пружиной сжатия.
Введение в конструкцию захвата источника сжатого воздуха, выполнение упругого элемента в виде манометрической пружины плоскоовального сечения с герметизированными концами, а также привода перемещения в виде электромагнита и штока в виде сердечника электромагнита повышает надежность захвата и удержания детали. При этом положение губок в пространстве уже не может определяться положением, формой и размерами зажимаемой детали, как это имеет место в прототипе. Губки, находящиеся в нормально замкнутом состоянии, постоянно удерживают деталь, если на электромагнит не подается напряжение. Снабжение захвата источником сжатого воздуха позволяет изменять (уменьшать или увеличивать) усилие захвата и удержания детали, так как при подаче сжатого воздуха в манометрическую пружину плоскоовального сечения с герметизированными концами изменяется ее жесткость.
Конструкция захвата имеет минимальное количество трущихся пар источников генерации, загрязняющих микрочастиц износ, что позволяет рекомендовать его для установки в устройствах, работающих в чистых помещениях.
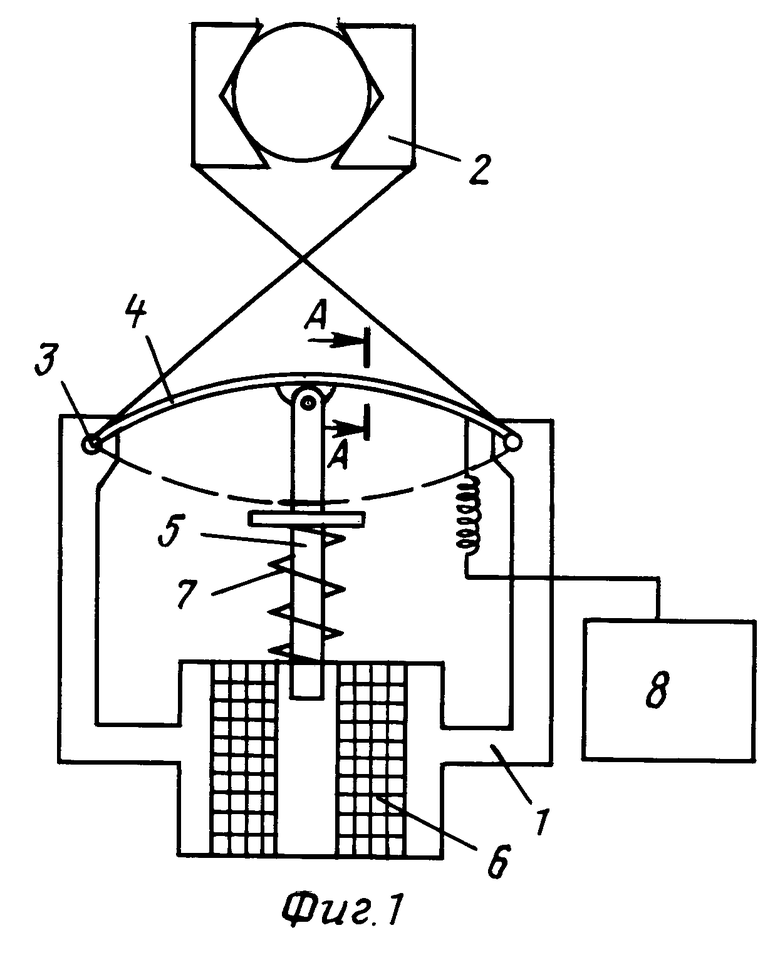
На фиг. 1 изображен захват манипулятора; на фиг. 2 сечение А-А на фиг. 1.
Захват манипулятора содержит корпус 1, губки 2, установленные на опорах 3 в нормально замкнутом состоянии. Упругий элемент 4 выполнен в виде манометрической пружины плоскоовального сечения с герметизированными концами, расположенной выпуклой поверхностью к штоку 5 и связанной с ним. Герметизированные концы шарнирно закреплены в корпусе 1 на опорах 3. Упругий элемент 4 в средней части шарнирно связан со штоком 5 привода, выполненного в виде электромагнита 6. Торцовые поверхности штока 5 и электромагнита 6 связаны между собой посредством пружины сжатия 7. Захват дополнительно снабжен источником 8 сжатого воздуха для подачи последнего под различным давлением в манометрическую пружину плоскоовального сечения.
Захват манипулятора работает следующим образом.
В отсутствии напряжения на обмотках электромагнита 6 губки 2 находятся в нормально замкнутом состоянии. При подаче напряжения на обмотки электромагнита 6 происходит втягивание штока 5 внутрь электромагнита 6; пружина 7 сжимается и происходит изгиб упругого элемента 4. Так как упругий элемент имеет только два устойчивых положения, то после прогиба до определенной величины происходит мгновенный перескок из одного устойчивого положения выпуклой частью к губкам 2, в другое вогнутой частью к губкам, в результате чего губки расходятся.
Замыкание губок 2, а, следовательно, и захват детали происходит при снятии напряжения с обмоток электромагнита 6. Пружина 7 разжимается, за счет чего шток 5 перемещается вверх и упругий элемент 4 переходит в другое устойчивое состояние выпуклой частью вверх. При этом захват и удержание детали происходит при снятии напряжения с электромагнита, а освобождение детали из губок 2 при подаче напряжения на электромагнит. Подавая в упругий элемент 4 (манометрическую пружину) сжатый воздух от источника 8 под различным давлением появляется возможность регулирования усилия захвата и удержания детали (чем больше давление в манометрической пружине, тем больше усилие захвата и удержания детали, и наоборот)
Применение устройства позволяет повысить надежность захвата и удержания детали при возможности регулирования усилия захвата и удержания.
Захват целесообразно использовать при разработке экологически чистого технологического оборудования, предназначенного для работы в чистых помещениях.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1992 |
|
RU2008196C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ИСПАРИТЕЛЕЙ В ВАКУУМНОМ НАПЫЛИТЕЛЬНОМ ОБОРУДОВАНИИ | 1992 |
|
RU2041288C1 |
| ДОЗИРУЮЩИЙ ПИТАТЕЛЬ ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 1991 |
|
RU2016831C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2028927C1 |
| ЭРЕКТОР | 1990 |
|
RU2014044C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ | 1993 |
|
RU2074330C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПЛЕНОК В ВАКУУМЕ | 1991 |
|
RU2007500C1 |
| КАТОДНЫЙ УЗЕЛ ДЛЯ ИОННО-ПЛАЗМЕННОГО НАНЕСЕНИЯ ТОНКИХ ПЛЕНОК В ВАКУУМЕ | 1992 |
|
RU2074904C1 |
| ЧИСТАЯ КОМНАТА | 1994 |
|
RU2074930C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 1992 |
|
RU2008198C1 |

Изобретение относится к электронному машиностроению, а более конкретно к захватам манипуляторов, работающих в чистых помещениях, преимущественно в производстве изделий электронной техники. Захват манипулятора снабжен источником сжатого воздуха, а изогнутый упругий элемент выполнен в виде манометрической пружины плоскоовального сечения с герметизированными концами, расположенной выпуклой поверхностью к штоку и связанной с ним, при этом полость манометрической пружины связана с источником сжатого воздуха, а привод перемещения выполнен в виде электромагнита, причем шток выполнен в виде сердечника электромагнита и подпружинен пружиной сжатия. 2 ил.
ЗАХВАТ МАНИПУЛЯТОРА, содержащий корпус с установленным на нем изогнутым упругим элементом и зажимные губки, расположенные на изогнутом упругом элементе и связанные посредством него с приводом их перемещения, имеющим подпружиненный относительно его корпуса шток, отличающийся тем, что он снабжен источником сжатого воздуха, а изогнутый упругий элемент выполнен в виде манометрической пружины плоскоовального сечения с герметизированными концами, расположенной выпуклой поверхностью к штоку и связанной с ним, при этом полость манометрической пружины связана с источником сжатого воздуха, а привод перемещения выполнен в виде электромагнита, причем шток выполнен в виде сердечника электромагнита и подпружинен пружиной сжатия.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захват промышленного робота | 1977 |
|
SU672014A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
