(54) ЗАХВАТ ПРОМЬЙШЕННОГО РОБОТА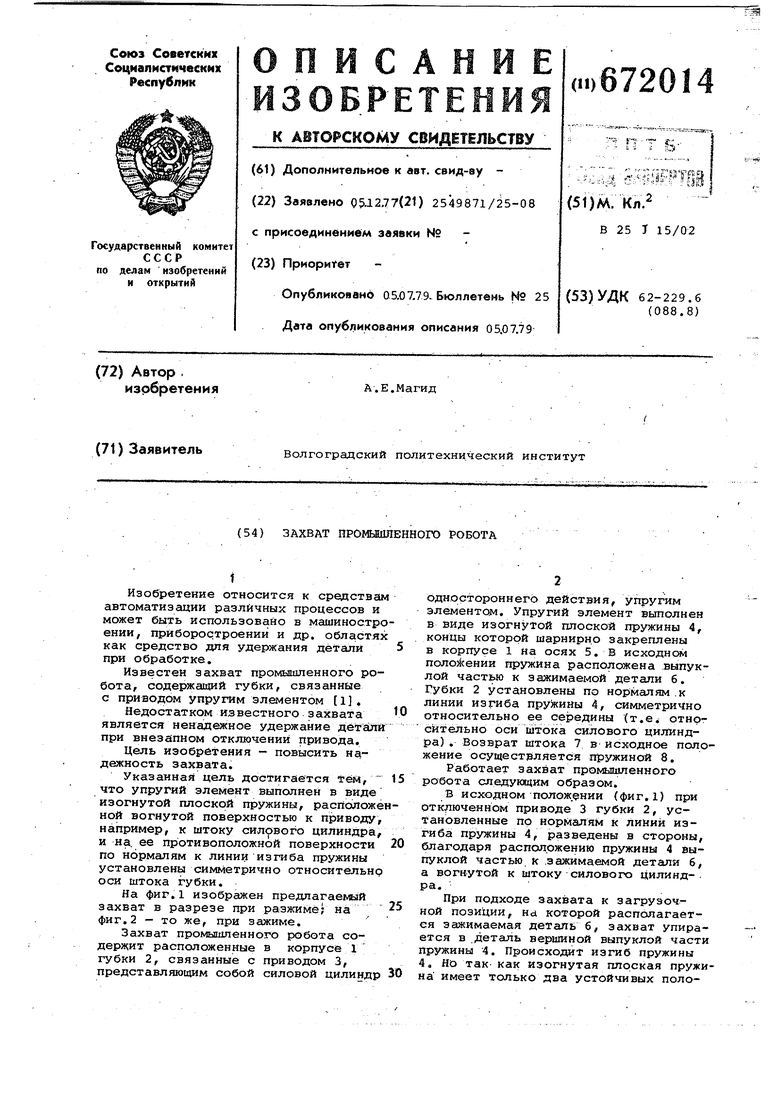
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1992 |
|
RU2043919C1 |
| Схват промышленного робота | 1989 |
|
SU1770121A1 |
| Схват промышленного робота | 1982 |
|
SU1033312A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2008200C1 |
| Схват промышленного робота | 1978 |
|
SU716811A1 |
| Захват манипулятора | 1991 |
|
SU1816686A1 |
| Захват | 1977 |
|
SU662343A1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1329948A1 |
| Схват промышленного робота | 1978 |
|
SU716810A1 |
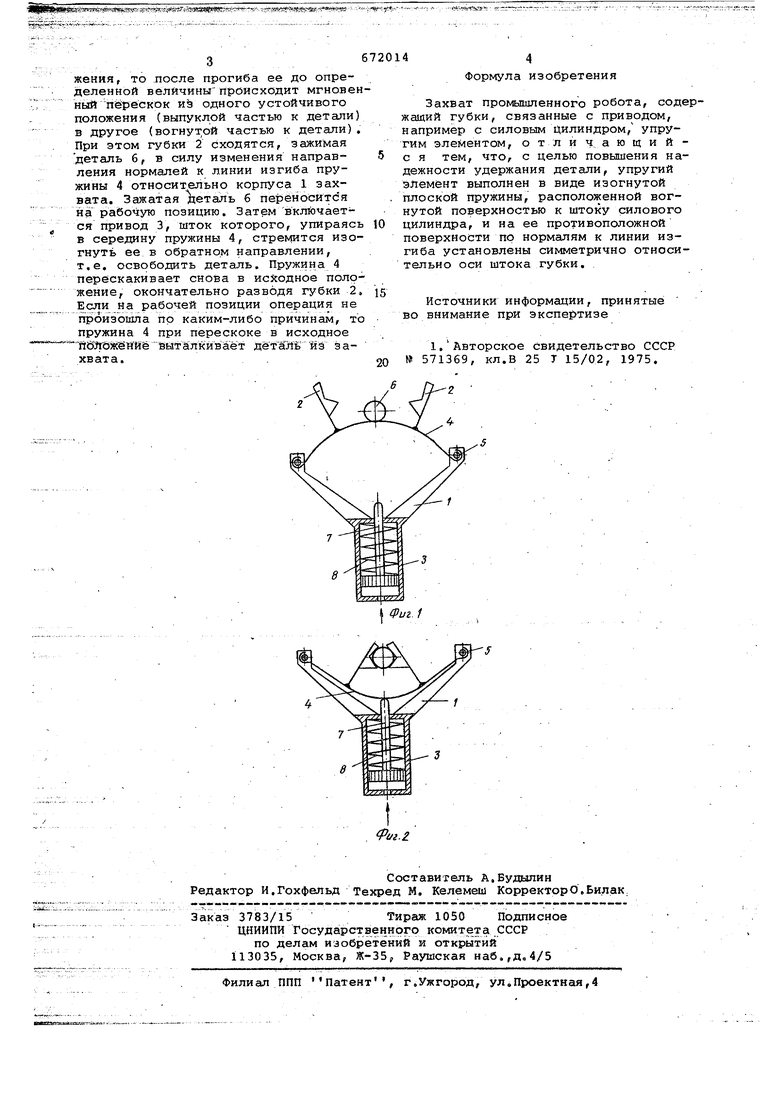
Изобретение относится к средства автоматизации различных процессов и может быть использовано в машиностр ении, приборостроении и др. областя как средство для удержания детали при обработке. Известен захват промышленного робота, содержащий губки, связанные с приводом упругим элементом 1. Недостатком известного захвата является ненадежное удержание детсш при внезапном отключении привода. Цель изобретения - повысить надежность захвата. Указанная цель достигается тем, что упругий элемент выполнен в виде изогнутой плоской пружины, располож ной вогнутой поверхностью к приводу на.пример, к штоку силового цилиндра и на. ее противоположной поверхности по нормалям к линии изгиба пружины установлены симметрично относительно оси штока губки, На фиг.1 изображен предлагаемый захват в разрезе при разжиме; на фиг.2 - то же, при зажиме. Захват промышленного робота содержит расположенные в корпусе I губки 2, связанные с приводом 3, представляющим собой силовой цилиндр одностороннего действия, упругим элементом. Упругий элемент выполнен в виде изогнутой плоской пружины 4, концы которой шарнирн.о закреплены в корпусе 1 на осях 5. В исходнс поло)(сении пружина расположена .выпуклой частью к зажимаемой детали б. Губки 2 установлены по нормгшям .к линии изгиба пружины 4, симметрично относительно ее середины (т.е относйтельно оси штока силового цилиндра) . Возврат штока 7 в- исходное положение осуществляется пружиной 8. Работает захват промьшшенного робота следующим образом. В исходном полож.ении (фиг.1) при отключенном приводе 3 губки 2, установленные по нормалям к линий изгиба пружины 4, разведены в стороны, благодаря расположению пружины 4 выпуклой частью к .зажимаемой детали 6, а вогн-утой к штоку силового цилинд-. ра. При подходе захвата к загрузочной позиции, на которой располагается зажимаемая деталь 6, захват упирается в .деталь вершиной выпуклой части пружины 4. Происходит изгиб пружины 4, Но так как изогнутая плоская пружина имеет только два устойчивых поло
