Изобретение относится к машиностроению и может быть использовано в робототехнике и гибких автоматизированных производствах.
Известен пространственный механизм для перемещения и ориентации деталей, содержащий неподвижное основание и связанные с ним приводы. Приводы выполнены в виде шести тяг, каждая из которых выполнена с возможностью регулирования длины двигателем и снабжена связанными с обоими концами шарнирами, один из которых соединяет тягу с неподвижным основанием, а другой - с выходным звеном.
Недостатком аналога являются малые кинематические возможности, так как не представляется возможным повернуть выходное звено на угол порядка 360о.
Наиболее близким по технической сущности и достигаемому результату к изобретению является плоский пространственный механизм для перемещения и ориентации деталей, содержащий неподвижное основание и выходное звено, связанные между собой посредством трех приводов.
Недостатком прототипа являются малые кинематические возможности, так как не представляется возможным повернуть выходное звено на угол порядка 360о - мешают сами приводы, расположенные в одной из плоскостей. Причем такой манипулятор совершает движение только в одной плоскости, а не в пространстве.
Цель изобретения - расширить кинематические возможности механизма.
Это достигается тем, что все приводы расположены не в одной плоскости и связаны с основанием и выходным звеном посредством цилиндрических шарниров, между неподвижным основанием и выходным звеном установлено подвижное основание, связанное с неподвижным основанием посредством трех приводов, и с выходным звеном также посредством трех приводов, причем структуры l-координат расположены во взаимно перпендикулярных плоскостях.
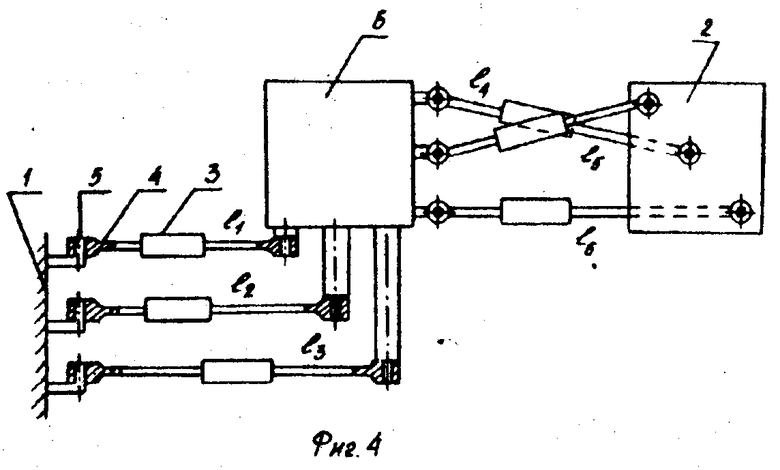
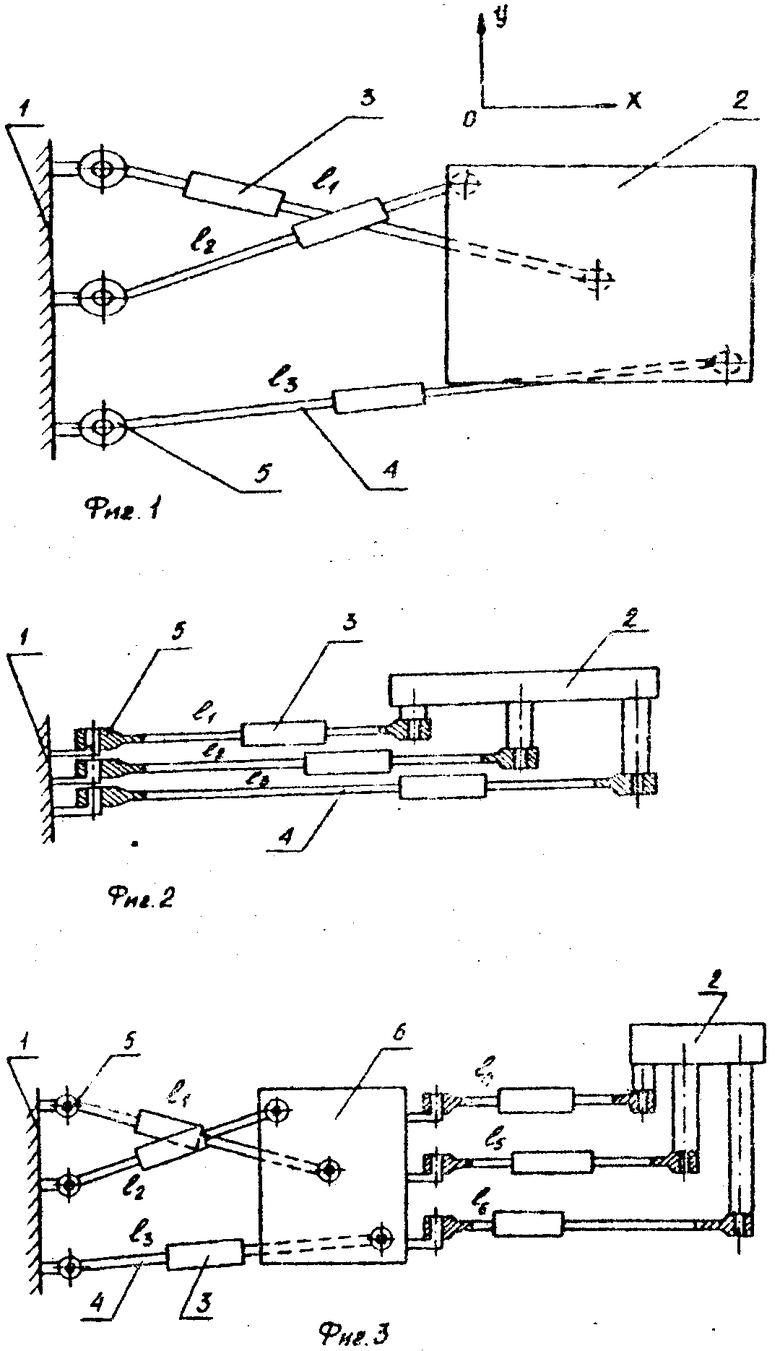
На фиг. 1 показан предлагаемый пространственный механизм, план; на фиг. 2 - то же, вид сбоку; на фиг. 3 - предлагаемый механизм, вариант, план; на фиг. 4 - то же, вид сбоку.
Предлагаемый механизм (фиг. 1) содержит основание 1, выходное звено 2, которые связаны между собой посредством приводов 3 и тяг 4 (l1, l2, l3). Приводы 3 (фиг. 2) расположены не в одной плоскости и связаны с основанием 1 и выходным звеном 2 посредством цилиндрических шарниров 5.
Пространственный механизм (фиг. 3) содержит неподвижное основание 1, выходное звено 2, неподвижное основание 6, которые связаны между собой посредством приводов 3 и тяг 4 (l1-l6). Три привода 3 и тяги 4 соединяют между собой неподвижное основание 1 и подвижное 2 (l1, l2, l3). Другие три привода 3 (фиг. 4) и тяги 4 соединяют между собой подвижное основание 6 и выходное звено 2 (l4, l5, l6). В первом и во втором случае соединение происходит по структуре плоских l-координат, которые взаимно перпендикулярны (фиг. 3, 4). Приводы 3 расположены не в одной плоскости и связаны с неподвижным 1, подвижным 6 основаниями и выходным звеном 2 посредством цилиндрических шарниров 5.
Устройство (фиг. 1, 2) работает следующим образом.
При изменении длин тяг 4 (l1, l2, l3) посредством приводов 3 выходное звено 2 совершает плоское движение в плоскости ХОY. При этом приводы 3 и тяги 4 не мешают друг другу, так как расположены в различных плоскостях. Это позволяет поворачиваться выходному звену 2 на угол, близкий к 360о.
Пространственный механизм (фиг. 3, 4) работает следующим образом.
При изменении длин тяг 4 (l1-l6) за счет приводов 3 выходное звено 2 совершает пространственное движение с возможностью пространственного поворота на угол, близкий к 360о, т. е. относительно любой координатной оси (фиг. 3 и 4). Разделения приводов и их расположение в разных плоскостях не мешает им работать - они не задевают друг друга, так как находятся в различных плоскостях (56) 1. Авторское свидетельство СССР N 1757867, кл. В 25 J 9/00, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1992 |
|
RU2028927C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПЛЕНОК В ВАКУУМЕ | 1991 |
|
RU2007500C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ИСПАРИТЕЛЕЙ В ВАКУУМНОМ НАПЫЛИТЕЛЬНОМ ОБОРУДОВАНИИ | 1992 |
|
RU2041288C1 |
| ЧИСТАЯ КОМНАТА | 1994 |
|
RU2074930C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1992 |
|
RU2008196C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПОДЛОЖКОДЕРЖАТЕЛЯ | 1997 |
|
RU2115764C1 |
| Устройство для амортизации | 1990 |
|
SU1765571A1 |
| Механизм перемещения | 1989 |
|
SU1733907A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1992 |
|
RU2043919C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ В ВАКУУМНЫХ УСТАНОВКАХ | 1992 |
|
RU2038416C1 |
Изобретение относится к машиностроению и может быть использовано в робототехнике и гибких автоматизированных производствах. В пространственном механизме приводы расположены не в одной плоскости и связаны с основанием и выходным звеном посредством цилиндрических шарниров. Между неподвижным основанием и выходным звеном установлено подвижное основание, связанное с неподвижным основанием посредством трех приводов, и с выходным звеном также посредством трех дополнительных приводов, расположенных также не в одной плоскости. 4 ил.
ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ, содержащий основание, выходное звено, связанные между собой посредством трех приводов, расположенных не в одной плоскости и связанных с основанием и с выходным звеном посредством цилиндрических шарниров, отличающийся тем, что в пространственный механизм введено дополнительное основание, связанное с основным посредством трех дополнительных приводов, расположенных также не в одной плоскости, и дополнительных цилиндрических шарниров.
