Изобретение относится к машиностроению, а более конкретно к исполнительным устройствам на основе l-координат, предназначенных для работы в экологически чистых средах.
Известно исполнительное устройство, содержащее координатный стол, выполненный из верхней и нижней плит, перемещающихся на пружинах, направляемых биморфными пьезокерамическими пластинами.
Недостатком аналога являются малые кинематические возможности и сложность конструкции. При этом перемещение стола осуществляется только по трем направлениям.
Наиболее близким по технической сущности и достигаемому результату является l-координатное исполнительное устройство, содержащее основание, выходное звено и тяги с приводами для регулирования расстояний между парами заданных точек, одна из которых принадлежит основанию, а другая - выходному звену.
Недостатком прототипа являются малые кинематические возможности и сложность конструкции, так как не представляется возможность перемещать выходное звено на значительное расстояние относительно исходного положения, а наличие тяг с приводами усложняет конструкцию.
В основу изобретения положена задача повышения кинематических возможностей при упрощении конструкции.
Это решается тем, что тяги выполнены жесткими, постоянной длины, один конец тяги шарнирно связан с выходным звеном, другой - с подвижной опорой, выполненной из магнитомягкого материала и установленной на основании с возможностью перемещения по поверхности основания, которое выполнено в виде двухкоординатного электромагнитного стола, число подвижных опор не менее трех, а с одним шарниром связано не более двух тяг.
Введение в l-координатное исполнительное устройство жестких тяг и подвижных опор, установленных на основании с возможностью перемещения, а также выполнение основания в виде двухкоординатного электромагнитного стола придают устройству новые свойства - возможность перемещения вдоль поверхности двухкоординатного электромагнитного стола любой формы и расположения, возможность поворота вдоль оси, нормальной к поверхности стола на любой угол, а также возможность ориентации выходного звена только за счет соответствующего расположения подвижных опор на основании, что и позволяет повысить кинематические возможности при упрощении конструкции механизма.
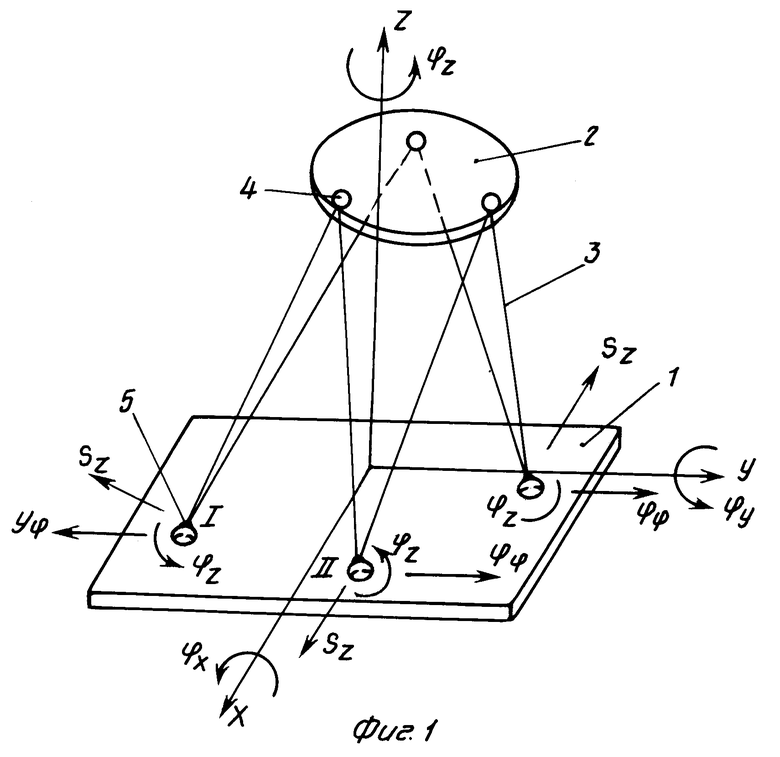
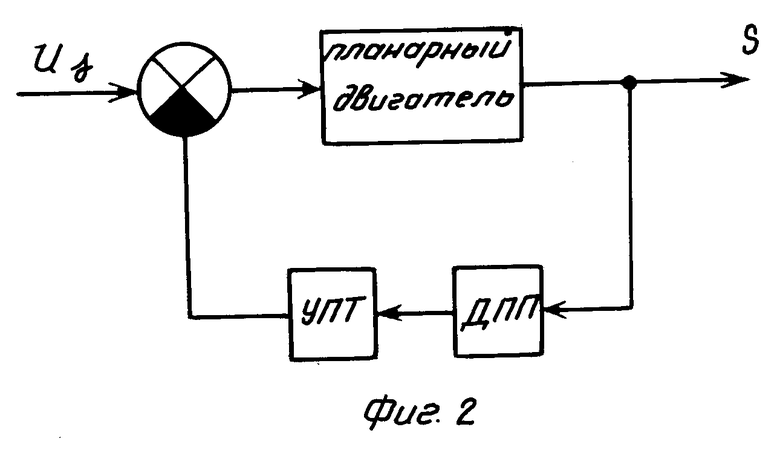
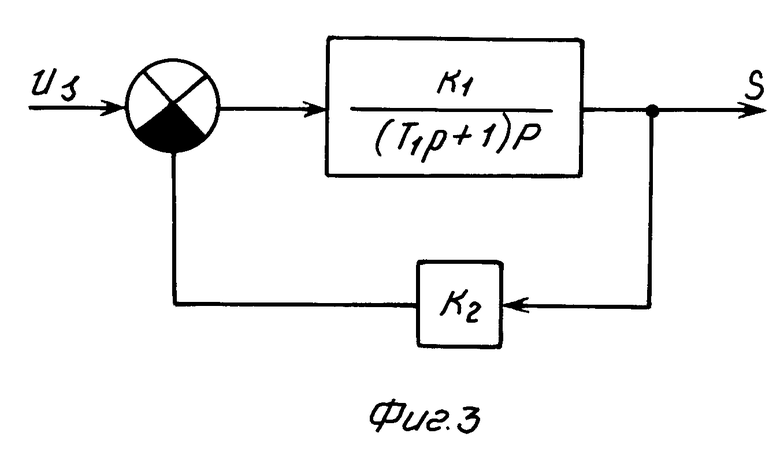
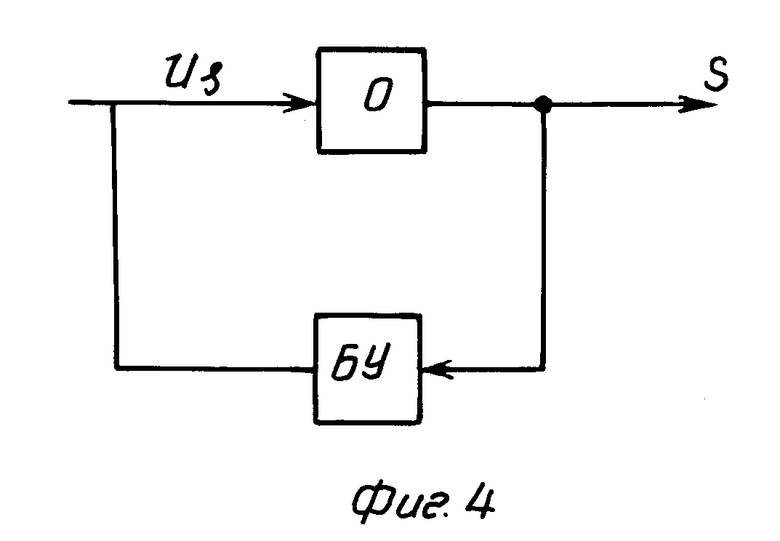
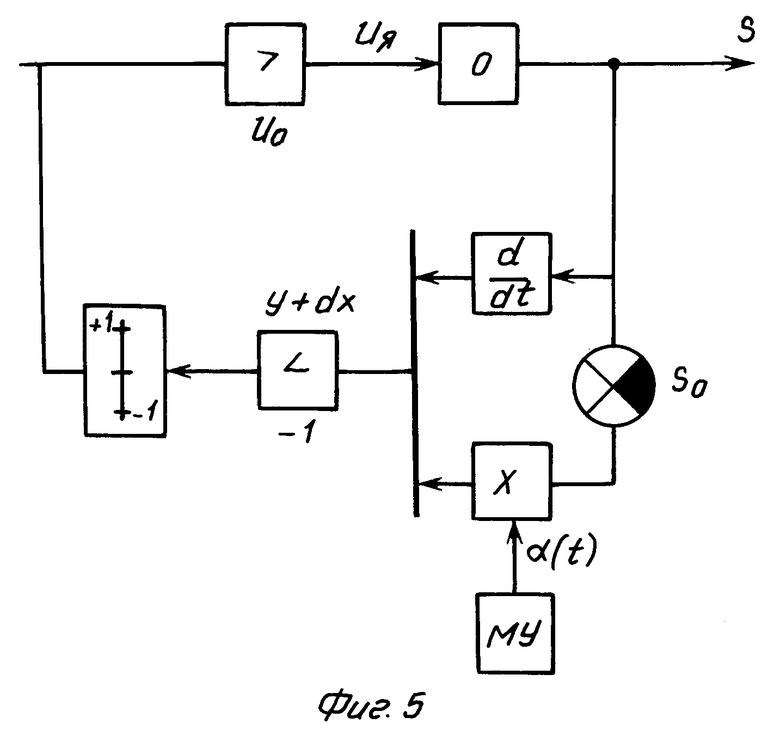
На фиг.1 показана схема l-координатного исполнительного устройства; на фиг. 2 - система управления перемещением подвижной опоры с обратной связью; на фиг. 3 - функциональная схема двигателя с обратной связью; на фиг.4 - схема оптимального устройства перемещения (УП) с блоком управления (БУ) в системе с обратной связью; на фиг.5 - развернутая функциональная схема оптимального устройства перемещения (УП) одной подвижной опоры; So - требуемое конечное значение перемещения подвижной опоры;  - блок дифференцирования регулируемой величины ϕ(t); Х - блок перемещения электрических сигналов α (t) и х(t); МУ - блок моделирующего устройства.
- блок дифференцирования регулируемой величины ϕ(t); Х - блок перемещения электрических сигналов α (t) и х(t); МУ - блок моделирующего устройства.
L - координатное исполнительное устройство (фиг.1) содержит основание 1, выполненное в виде двухкоординатного электромагнитного стола, выходного звена 2, жесткие тяги 3, одни концы которых связаны с выходным звеном шарнирами 4, а другие шарнирами 5 - с подвижными опорами из магнитомягкого материала. Подвижные опоры 6 установлены на основании с возможностью перемещения по поверхности основания, число опор не менее трех. Основание соединено с блоками питания и управления (фиг.2-5). В качестве опоры, связанной с тягой 3 посредством шарнира 5, используется плоская стопа, выполненная из магнитомягкого материала, например армко-железа. С одним шарниром 5 связано не более двух тяг 3.
L-координатное исполнительное устройство работает следующим образом.
При включении блока питания на основание подается напряжение, величина и место приложения которого регулируется посредством блока управления, как это имеет место в стандартных планарных электродвигателях. Опоры получают возможность перемещения по поверхности основания, что приводит к изменению положения подвижных опор друг относительно друга и относительно основания. Это в свою очередь приводит к изменению положения в пространстве жестких тяг 3, а следовательно, и выходного звена 2. При этом выходное звено 2 имеет шесть степеней подвижности, как и в обычных l-координатах, однако перемещение механизма вдоль поверхности основания может быть ограничено только размерами самого основания, а вращение вокруг оси, нормальной к поверхности основания, на любой угол и не ограничено геометрическими размерами длин тяг 3. Перемещение каждой из трех опор, расположенных на основании, осуществляется блоком управления, как в планарных двигателях.
Парное сочетание двух линейных электромагнитных приводов (ЭПМ) образует модуль (Х, Y-ЩД). Двухкоординатный привод (Х, Y-привод), созданный на базе (Х, Y-ЩД, обеспечивает две степени подвижности в декартовой плоскости. Наиболее перспективен ЭМП индукторного типа с возбуждением от постоянных магнитов, как более универсальный по применению и имеющий наилучшие показатели по динамической добротности и габаритами.
Плоские модули Х,Y-ЩД магнитоэлектрического индукторного типа приспособлены для работы с максимально мелкой нарезкой зубцовых делений для обеспечения высокой точности перемещения.
При этом решена основная технологическая проблема получения микропазов и рабочих поверхностей с требуемой конфигурацией и точностью:
отношение глубины паза к половине периода зубцовой структуры 0,8-1,1 (период 0,48, 0,64 мм);
трапецеидальный профиль паза с углом не более 7o;
накопленная погрешность изготовления пазов по шагу на рабочем поле индуктора и якоря (600х600 мм) не более 10 мкм;
неплоскостность рабочих поверхностей индуктора и якоря не хуже 5 мкм для обеспечения воздушного зазора между ними не более 15 мкм при минимальных массах и максимальной жесткости элементов.
Система управления обеспечивает однозначное положение опор на основание, а следовательно, и однозначное положение в пространстве выходного звена.
Перемещение выходного звена 2 вдоль оси Z обеспечивается одновременным равномерным линейным перемещением  I, II и III опор, причем векторы
I, II и III опор, причем векторы  расположены под углом 120о относительно друг друга. Перемещение же выходного звена 2 вдоль осей Х и Y обеспечивается одновременным движением I, II, III опор в направлении указанных осей. Вращение ϕz выходного звена 2 обеспечивается одновременным перемещением ϕz I, II и III опор, вращение ϕх выходного звена 2 вокруг оси Х может быть обеспечено одновременным перемещением Yy I опоры вдоль оси Y и II и III опор вдоль оси Y в противоположном направлении.
расположены под углом 120о относительно друг друга. Перемещение же выходного звена 2 вдоль осей Х и Y обеспечивается одновременным движением I, II, III опор в направлении указанных осей. Вращение ϕz выходного звена 2 обеспечивается одновременным перемещением ϕz I, II и III опор, вращение ϕх выходного звена 2 вокруг оси Х может быть обеспечено одновременным перемещением Yy I опоры вдоль оси Y и II и III опор вдоль оси Y в противоположном направлении.
Аналогичным образом обеспечивается вращение ϕy выходного звена 2 вокруг оси Y.
Предлагаемое исполнительное устройство обладает 6-ю степенями свободы.
Перемещение одной опоры 6 (или устройства перемещения УП), которая является элементом планарного двигателя, описывается уравнением
T +S=K1·Uя где
+S=K1·Uя где  =
=  - скорость опоры 6;
- скорость опоры 6;
Uя - напряжение питания якорной цепи;
Т1 - постоянная времени УП, определяемая суммарным моментом инерции УП, а также электрическими параметрами двигателя;
К1 - коэффициент передачи VII.
Для того, чтобы VII позволило обеспечить перемещение на произвольное значение S, необходимо двигатель снабдить цепью отрицательной обратной связи, содержащей датчик поступательного перемещения (ДПП) и усилитель постоянного тока (УПТ) (фиг.2).
Назначение моделирующего устройства состоит в формировании требуемого закона изменения α (t), полученного путем численного решения уравнения Беллмана. Программа для перевода конечного положения выходного звена 2 в зависимости от положения каждой из опор 6 и длин l1, l2,...,l6определяется на ЭВМ СМ-4 посредством программы на языке ФОРТРАН-4.
Применение предлагаемого l-координатного исполнительного устройства позволяет, во-первых, повысить кинематические возможности - перемещение вдоль основания на неограниченное расстояние, вращение вокруг оси, нормальной к поверхности основания на неограниченный угол, а, во-вторых, упростить его конструкцию за счет использования жестких тяг без приводов.
Устройство целесообразно использовать при создании экологически чистого технологического оборудования электронной техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 1992 |
|
RU2008198C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ИСПАРИТЕЛЕЙ В ВАКУУМНОМ НАПЫЛИТЕЛЬНОМ ОБОРУДОВАНИИ | 1992 |
|
RU2041288C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПЛЕНОК В ВАКУУМЕ | 1991 |
|
RU2007500C1 |
| ЧИСТАЯ КОМНАТА | 1994 |
|
RU2074930C1 |
| УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ ПОДЛОЖКОДЕРЖАТЕЛЯ | 1997 |
|
RU2115764C1 |
| Механизм перемещения | 1989 |
|
SU1733907A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТАЦИИ ДЕТАЛЕЙ | 1992 |
|
RU2008196C1 |
| Устройство для амортизации | 1990 |
|
SU1765571A1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ В ВАКУУМНЫХ УСТАНОВКАХ | 1992 |
|
RU2038416C1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 1992 |
|
RU2043919C1 |
Изобретение относится к машиностроению, а более конкретно к исполнительным устройствам манипуляторов, предназначенным для работы в экологически чистых средах. Цель изобретения - повышение кинематических возможностей при упрощении конструкции. Тяги выполнены жесткими, постоянной длины. Один конец тяги шарнирно связан с выходным звеном, другой - с подвижной опорой, выполненной из магнитомягкого материала и установленной на основании с возможностью перемещения по поверхности основания, которое выполнено в виде двухкоординатного электромагнитного стола. Число подвижных опор не менее трех, а с одним шарниром связано не более двух тяг. 5 ил.
МАНИПУЛЯТОР, содержащий основание и выходное звено, связанные между собой жесткими тягами постоянной длины, причем один конец каждой тяги шарнирно связан с выходным звеном, а другой - с подвижной опорой, установленной на основании с возможностью перемещения по нему, причем число подвижных опор не менее трех, а с одним шарниром связано не более двух тяг, отличающийся тем, что подвижная опора выполнена из магнитомягкого материала, а основание выполнено в виде двухкоординатного электромагнитного стола.
| Манипулятор | 1982 |
|
SU1049244A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
