Изобретение относится к гироскопическому приборостроению и может быть использовано преимущественно для обеспечения навигации морских, воздушных и наземных объектов, при геодезических и гравиметрических работах.
Известен способ выработки навигационных параметров и вертикали места, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, установленных по осям приборного трехгранника, связанного с гироплатформой, формирование сигналов управления гироплатформой, отработку сформированного сигнала при помощи гироскопа и вычисление навигационных параметров и вертикали места на основе информации о составляющих абсолютной угловой скорости приборного трехгранника.
Недостатком известного способа является необходимость использования в нем гироплатформы с двумя трехстепенными гироскопами и трехосным подвесом гироплатформы, что усложняет реализацию способа и не обеспечивает требуемой точности.
Целью изобретения является упрощение реализации способа при повышении его точности.
Цель достигается тем, что в известном способе дополнительно измеряют составляющие кажущегося ускорения при помощи акселерометров, установленных не менее чем на одной дополнительной гироплатформе, сигналы управления основной и дополнительной гироплатформами формируют из условия обеспечения неравенства скоростных и отсутствия баллистических девиаций, а также из условия минимизации инструментальных погрешностей на точность выработки навигационных параметров, при этом горизонтальные составляющие абсолютной угловой скорости определяют по составляющим кажущегося ускорения, измеряемым при помощи горизонтальных акселерометров, установленных по одноименным осям гироплатформ, или по углам разности наклона осей кинематических моментов гироскопов относительно плоскости горизонта гироплатформ с учетом величин скоростных девиаций гироплатформ, а вертикальную составляющую абсолютной угловой скорости определяют по составляющим кажущегося ускорения, измеряемым при помощи горизонтальных акселерометров, установленных по одноименным осям гироплатформ, с использованием информации о горизонтальных составляющих абсолютной угловой скорости.
Существенная особенность известного способа заключается в том, что исходной информацией для определения выходных параметров являются выработанные три проекции абсолютной угловой скорости приборного трехгранника, моделирующего географический трехгранник Дарбу. Это значит, что в известном способе в том числе измеряется и формируется сигнал о вертикальной составляющей абсолютной угловой скорости приборного трехгранника от азимутального гироскопа гироплатформы инерциальной системы.
В известном способе гироплатформа включает в себя два трехстепенных гироскопа. Обязательной составной частью гироплатформы полуаналитической инерциальной системы является гироскоп, стабилизирующий гироплатформу в азимуте.
Другой ее особенностью является то, что карданный подвес, связывающий стабилизированную гироплатформу с объектом, выполнен в виде трехосного карданного подвеса. При этом одно карданное кольцо азимутальное, обеспечивающее свободу вращения гироплатформы вокруг вертикальной оси, имеет неограниченный угол поворота.
Для передачи электрических сигналов с неподвижной части прибора на гироплатформу и обратно на оси азимутального кольца монтируется специальная переходная контактная колонка, коллектор, кольца которого и контакты выполняются из золота, платины и иридия. При этом само азимутальное кольцо в значительной степени определяет конструктивы гироскопического модуля центрального прибора инерциальной системы.
В предложенном способе выработка навигационных параметров и вертикали места обеспечиваются без использования сигналов об азимутальном направлении гироплатформы в пространстве от гироскопа, стабилизирующего гироплатформу в азимуте. В предложенном способе сигнал об азимутальном направлении гироплатформы в азимуте вырабатывается аналитически.
Другими техническими результатами предложенного способа являются активное воздействие на влияние инструментальных погрешностей на точность выработки навигационных параметров, а также уменьшение влияния случайных погрешностей на точность выработки навигационных параметров.
Управляющие сигналы гироскопов задаются таким образом, чтобы обеспечить разную величину скоростной девиации у каждой стабилизированной гироплатформы и в то же время обеспечить отсутствие баллистической девиации.
Неодинаковое значение скоростных девиаций позволяет по разности сигналов одноименных акселерометров или по разности сигналов одноименных датчиков углов двух или более гироплатформ определить горизонтальные составляющие абсолютной угловой скорости трехгранника Дарбу. По известным значениям горизонтальных составляющих абсолютной угловой скорости трехгранника Дарбу по сигналам акселерометров и по сигналам датчиков углов качек объекта относительно стабилизированной гироплатформы определяют выходные параметры.
Задаваемые зависимости величин и их законов скоростных девиаций в каждой гироплатформе отражают влияние инструментальных погрешностей на точность выработки навигационных параметров. Из теоретического обоснования также следует, что в способе случайные инструментальные погрешности входящих гироплатформ уменьшаются за счет их осреднения.
Предварительные конструктивные проработки дают основание полагать, что по сравнению с существующими или разрабатываемыми компактными инерционными системами объем гиромодуля может быть уменьшен в 5-6 раз при использовании одних и тех же гироскопов и акселерометров.
Миниатюрное исполнение гиромодуля делает возможным использование его для буровых установок при разведке и добыче полезных ископаемых. Доукомплектование инерциальной системы по предлагаемому способу гравиметром позволит использовать его при гравиметрических работах. При этом в инерциальной системе миниатюризация гиромодуля осуществляется без ухудшения точностных параметров.
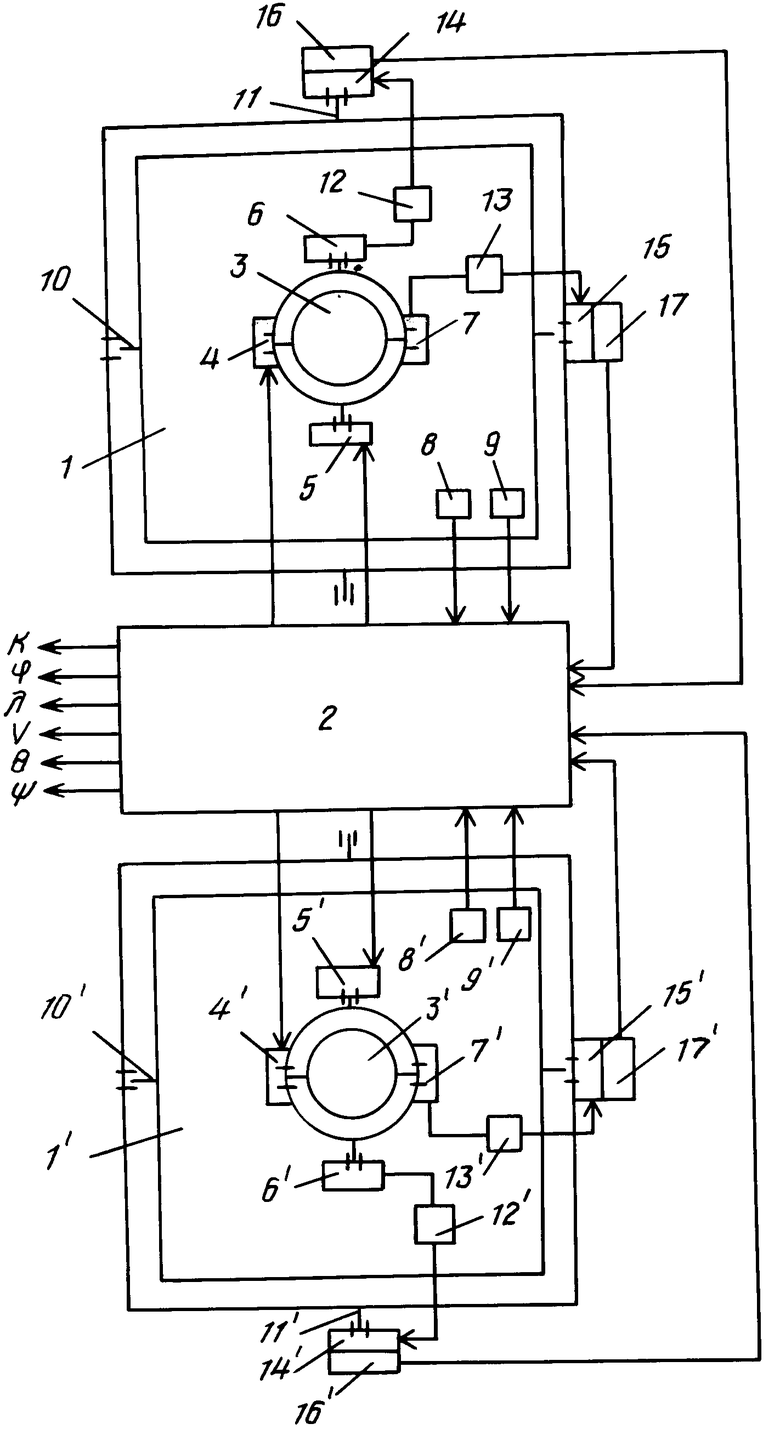
На чертеже представлена функциональная блок-схема инерциональной системы для осуществления способа.
Инерциальная система состоит из двух конструктивно идентичных стабилизированных гироплатформ 1 и 1' и блока 2 управления и выработки выходных параметров БУ ВВП. На каждой стабилизированной гироплатформе расположен один трехстепенной гироскоп 3 и 3'. При этом кинетический момент каждого гироскопа совпадает с направлением приборной вертикали данной стабилизированной гироплатформы. Гироскопы имеют датчики 4, 5 и 4', 5' моментов и датчики углов 6, 7 и 6, 7'. Кроме того, на каждой стабилизированной гироплатформе установлены акселерометры 8, 9 и 8', 9'. Оси чувствительности акселерометров на каждой гироплатформе ортогональны между собой и параллельны плоскости гироплатформы. Ось одного акселерометра параллельна внутренней оси 10 и 10' карданного подвеса гироплатформы. Наружная ось 11 и 11' карданного подвеса параллельна продольной оси объекта. Выходы датчиков 6, 7 и 6', 7' углов гироскопов 3 и 3' через посредство усилителей 12, 13 и 12'. 13' соединены с входами следящих двигателей 14, 15 и 14', 15', которые связаны с осями карданного подвеса. С этими же осями связаны датчики углов качек 16, 17 и 16', 17' относительно плоскости гироплатформы. Входы датчиков 4, 5 и 4', 5' момента гироскопов 3 и 3' соединены с соответствующими выходами блока 2 управления и выработки выходных параметров. Выходы акселерометров 8, 9 и 8', 9' и датчики углов качек 16, 17 и 16', 17' соединены с соответствующими входами БУВВП-2.
Выходами БУВВП для потребителей являются К курс объекта, V путевая скорость, ϕ- широта места, λ- долгота места, θ иΨ углы бортовой и килевой качек. На гироплатформы могут быть установлены гравиметрические чувствительные элементы. Гравиметрический чувствительный элемент может быть установлен на отдельной платформе и удерживаться в горизонте по сигналам θ иΨ выходов БУВВП.
Функционирует предлагаемая система следующим образом. Каждая гироплатформа с помощью следящих двигателей 14, 15 и 14', 15' соответственно по сигналам рассогласования датчиков углов 6, 7 и 6', 7' гироскопов 3 и 3' все время удерживается в одной плоскости с кожухом гироскопа.
Кожух каждого гироскопа вместе с гироплатформой приводится в положение, соответствующее заданному значению скоростной девиации для данной гироплатформы, с помощью моментов, накладываемых через датчики моменты 4, 5 и 4', 5' гироскопов 3 и 3' токами управления по сигналам, вырабатываемым в БУВВП. Поскольку заданные значения скоростных девиаций различные для каждой гироплатформы и, в свою очередь, пропорциональны горизонтальным составляющим абсолютной угловой скорости трехгранника Дарбу, разности показаний одноименных датчиков углов качек 16 и 16' и 17, 17' являются исходными источниками информации для определения горизонтальных составляющих абсолютной угловой скорости трехгранника Дарбу.
Выработку всех трех составляющих абсолютной угловой скорости трехгранника Дарбу, выходных параметров и влияние инструментальных погрешностей на точность выработки выходных параметров предлагаемым способом подтвердим теоретически.
В качестве исходной системы координат выберем трехгранник Дарбу ζηζ, повернутый вокруг вертикальной оси относительно географического трехгранника на угол К, соответствующий курсу объекта.
Проекции абсолютной угловой скорости трехгранника ζηζ на его соответствующие оси обозначим р, q, r.
Проекции ускорения вершины трехгранника ζηζ на его горизонтальные оси суть
Wζ R( +rp);
+rp);
Wη R(- +rq), где R радиус Земли, принятой за сферу.
+rq), где R радиус Земли, принятой за сферу.
Кажущееся ускорение по оси Оζ
Wζ +g-R(p2+q2), где g ускорение силы тяготения.
+g-R(p2+q2), где g ускорение силы тяготения.
Рассмотрим поведение двух гироплатформ.
С кожухом гироскопа первой гироплатформы жестко свяжем правую систему координат х1 y1 z1. С кожухом гироскопа второй гироплатформы систему координат x2 y2 z2.
Системы координат x1 y1 z1 и x2 y2 z2 образуются из системы координат ζηζ путем поворота вокруг осей оη1 oy1, oy2 на углы β1-и β2; γ1 и γ2.
Управление гироскопом каждой гироплатформы осуществляют по сигналам акселерометров через датчики моментов. Оси чувствительности акселерометров совпадают соответственно с осями ЛХ1, ОY1 и ОХ2, ОY2.
Проекции абсолютной угловой скорости трехгранников X1Y1Z1 и X2Y2Z2на их оси ОX1; ОY1; ОХ2; ОY2 будет: = p+
= p+ -rγ1;
-rγ1;  = p+
= p+ -rγ2;
-rγ2; = q+
= q+ -rβ1;
-rβ1;  = q+
= q+ -rβ2.
-rβ2.
Проекции ускорения, замеряемые акселерометрами, будут
a = R(
= R( +rp-Wζγ1)+ΔΔa
+rp-Wζγ1)+ΔΔa ; a
; a = R(
= R( +rp-Wζγ2)+ΔΔa
+rp-Wζγ2)+ΔΔa ;
;
a = R(-
= R(- +rq-Wζβ1)+ΔΔa
+rq-Wζβ1)+ΔΔa ; a
; a = R(-
= R(- +rq-Wζβ2)+ΔΔa
+rq-Wζβ2)+ΔΔa ,
,
где ΔΔax1;ΔΔay1;ΔΔax2;ΔΔay2 инструментальные погрешности акселерометров.
В соответствии с прецессионной теорией гироскопа =
=  + ΔΔp1;
+ ΔΔp1;  =
=  + ΔΔq1
+ ΔΔq1
для первой гировертикали; =
=  + ΔΔp2;
+ ΔΔp2;  =
=  + ΔΔq2
+ ΔΔq2
для второй гировертикали, где Mx1,My1,Mx2,My2 управляющие моменты гироскопов;
Н кинетический момент гироскопа;
ΔΔр1;ΔΔр2;ΔΔq1;ΔΔq2 дрейфы гироскопов.
Потребуем, чтобы скоростные девиации гироплатформ удовлетворяли условиям
β01=  γ01=
γ01= 
β02=  γ02=
γ02=  (1) тогда β1=β01+Δβ1;γ1=γ01+Δγ1; β2=β02+Δβ2;γ2= γ02+Δγ2, где Δβ1;Δγ1;Δβ2;Δγ2 погрешности отклонения гироплатформ от заданного положения. Здесь и далее углы β1;β2;γ1;γ2 полагаютcя малыми, так что sin
(1) тогда β1=β01+Δβ1;γ1=γ01+Δγ1; β2=β02+Δβ2;γ2= γ02+Δγ2, где Δβ1;Δγ1;Δβ2;Δγ2 погрешности отклонения гироплатформ от заданного положения. Здесь и далее углы β1;β2;γ1;γ2 полагаютcя малыми, так что sin β1; sin
β1; sin β2; sin
β2; sin γ1; sin
γ1; sin γ2;
γ2;
cosβ1=cosβ2=cosγ1=cosγ2=1;
ωo частота Шулера;
n1 и n2 заданные функции времени.
Одновременно обеспечим отсутствие баллистических девиаций при произвольном пространственном движении объекта.
Достаточным условием для выполнения этих требований является создание моментов вокруг осей прецессии гироскопов по законам, обеспечивающим n1(
n1( +rp)пр+pпр+
+rp)пр+pпр+ 
 n1(-
n1(- -rq)пр+qпр-
-rq)пр+qпр- 
 n2(
n2( +rp)пр+pпр+
+rp)пр+pпр+ 
 n2(-
n2(- +rq)пр+qпр-
+rq)пр+qпр- 
Уравнения движения гироплатформ в этом случае примут вид
p+ -rγ n1(
-rγ n1( +rp)пр+pпр+
+rp)пр+pпр+  +ΔΔp1+rΔγ01+
+ΔΔp1+rΔγ01+ 

p+ -rβ n1(-
-rβ n1(- +rp)пр+qпр-
+rp)пр+qпр-  +ΔΔq1-rΔβ01+
+ΔΔq1-rΔβ01+ 

p+ -rγ n2(
-rγ n2( +rp)пр+pпр+
+rp)пр+pпр+  +ΔΔp2+rΔγ02+
+ΔΔp2+rΔγ02+ 

q+ +rβ n2(-
+rβ n2(- +rq)пр+qпр-
+rq)пр+qпр-  +ΔΔq2-rΔβ02+
+ΔΔq2-rΔβ02+ 

где Δγ01,Δβ01,Δγ02 и Δβ02 -к погрешность неперпендикулярности осей чувствительности акселерометров с осью кинетического момента гироскопа;
Δl1 и Δl2 смещение центра тяжести гироподвеса вдоль оси кинетического момента;
m масса гироскопа.
Имея ввиду, что
( +rp)пр=
+rp)пр= 
 +rp-
+rp- +
+ 
(- +rq)пр=
+rq)пр=  -
- -rq+
-rq+ +
+ 
где



Для случая, когда горизонтальные составляющие абсолютной угловой скорости трехгранника Дарбу ζηζ определяются по данным датчиков углов качек гироплатформ θ1Ψ1 и θ2Ψ2
pпр=  p-
p-  +
+ 
qпр=  q+
q+ 
 где
где  Δγ1-Δγ2;
Δγ1-Δγ2;  Δβ1-Δβ2;
Δβ1-Δβ2;  Δθ1-Δθ2;
Δθ1-Δθ2;  ΔΨ1-ΔΨ2;
ΔΨ1-ΔΨ2;
Δθ1; Δθ2; ΔΨ1;ΔΨ2 инструментальные погрешности датчиков углов качек. получим следующие уравнения ошибок системы: +rΔpпр+
+rΔpпр+

 +
+  +
+  (
( +r
+r +
+ +r
+r )
) -r
-r -Δpпр=
-Δpпр=  +r
+r +
+ 

 -(
-( n1-
n1- n2)
n2) (2)
(2)
- +rΔqпр-
+rΔqпр-

 +
+  +
+  (
( -r
-r -
- +r
+r )
)
- +r
+r -Δqпр=
-Δqпр=  -r
-r +
+ 
 n1n2-
n1n2- -(
-( n1-
n1- n2)
n2) ,
,
где Δp  Δq
Δq 
 ΔΔp1-ΔΔp2,
ΔΔp1-ΔΔp2, ΔΔq1-ΔΔq2,
ΔΔq1-ΔΔq2,
 p
p
 Δl1-Δl2,
Δl1-Δl2,

 =
= 
 =
= 
Горизонтальные составляющие абсолютной угловой скорости трехгранника Дарбу ζηζ могут определяться также по сигналам акселерометров гироплатформ.
Если условия эксплуатации объекта таковы, что вертикальные ускорения объекта не вызывают существенных погрешностей,
pпр=  qпр=
qпр= 
Для объектов, где могут быть недопустимо большие вертикальные ускорения
pпр=  qпр=
qпр=  где az1и az2 сигналы акселерометров, оси чувствительности которых параллельны соответствующим осям кинематических моментов гироскопов (на функциональной блок-схеме они не указаны). Выходы этих акселерометров могут быть связаны с соответствующими входами блока управления и выработки выходных параметров.
где az1и az2 сигналы акселерометров, оси чувствительности которых параллельны соответствующим осям кинематических моментов гироскопов (на функциональной блок-схеме они не указаны). Выходы этих акселерометров могут быть связаны с соответствующими входами блока управления и выработки выходных параметров.
Уравнения ошибок в этом случае не будут содержать погрешностей датчиков углов качек. Их место займут погрешности акселерометров, вырабатывающие сигналы az1 и az2-ΔΔaz1иΔΔaz2:
a = Wζ-R(
= Wζ-R( +rp)
+rp)  -R(-
-R(- +rq)
+rq)  +ΔΔa
+ΔΔa ;
;
a = Wζ-R(
= Wζ-R( +rp)
+rp)  -R(-
-R(- +rq)
+rq)  +ΔΔa
+ΔΔa
Система уравнений (2) характеризует поведение погрешностей выработки горизонтальных составляющих абсолютной угловой скорости трехгранника ζηζ и ошибки выработки приборной вертикали места.
Вертикальную составляющую абсолютной угловой скорости трехгранника Дарбу ζηζнайдем по показаниям акселерометров и по известным значениям горизонтальных составляющих рпр и qпр. Для этого воспользуемся выражением
rпр=  откуда
откуда
Δr 
 +
+  [(
[( +
+ +r
+r +2Δγo)sinK-(
+2Δγo)sinK-( -
- +r
+r -
-
-2Δβo)cosK] (3)
Навигационные параметры находятся по составляющим абсолютной угловой скорости трехгранника ζηζ следующим образом:
pпрcosKпр+qпрsinKпр= - ;
;
qпрcosKпр-pпрsinKпр= ω cos ϕпр- 
rпр= ω sin ϕпр+  tg ϕпр-
tg ϕпр- , где Кпр приборное значение курса объекта;
, где Кпр приборное значение курса объекта;
ϕпр приборное значение широты места;
vЕ приборное значение восточной составляющей скорости объекта относительно Земли.
Уравнения ошибок автономного определения курса объекта и широты места тогда запишутся +(ω+
+(ω+ )ΔKпрcosϕ -(ΔpпрcosK+ΔqпрsinK)
)ΔKпрcosϕ -(ΔpпрcosK+ΔqпрsinK)
-(ΔK osϕ)+(ω+
osϕ)+(ω+ )Δϕпр= Δrпрcosϕ-(ΔqпрcosK-ΔpпрsinK)sinϕ (4)
)Δϕпр= Δrпрcosϕ-(ΔqпрcosK-ΔpпрsinK)sinϕ (4)
где Δϕпр ошибка определения широты места;
ΔKпр ошибка определения курса объекта;

Ошибка автономного определения скорости изменения долготы места будет: = (ΔqпрcosK-ΔpпрsinK)cosϕ+Δr sinϕ+(ΔK
= (ΔqпрcosK-ΔpпрsinK)cosϕ+Δr sinϕ+(ΔK inϕ) (5)
inϕ) (5)
Путевая скорость определяется как
v 
Вертикаль места вырабатывается по показаниям датчиков углов качек
θпр=  Ψпр=
Ψпр=  Ошибкой вертикали места будет
Ошибкой вертикали места будет
Δθпр=  -
- ; ΔΨ
; ΔΨ  -
- где
где 



Из (1) следует, что n1 и n2 характеризуют величину скоростной девиации.
Из (2), (3) и (4), (5) следует, что параметры n1 и n2 воздействуют на влияние инструментальных погрешностей на точность выходных параметров. Это влияние зависит как от величин n1 и n2, так и от закона их изменения.
Так, задаваясь, например, законом для n1 n01 + b1sin ω1t; n2 n02 + b2sin ω2t, где b1 < n01; b2 < n02, можно выделить определенные инструментальные погрешности и их компенсировать, при сравнении выходных параметров по координатам места со счислимыми координатами, выработанными по данным лага, или по данным других автономных средств.
Из (2) и (3) также следует, что случайные погрешности двух гироплатформ осредняются, хотя функционально две гироплатформы составляют одну инерциальную систему. Это значит, что при использовании трех гироплатформ с точки зрения надежности мы имеем две инерциальные системы, а с точки зрения точности каждая гироплатформа будет вносить свой вклад в осреднение случайных погрешностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247944C2 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2247324C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА (ВАРИАНТЫ) | 2005 |
|
RU2272995C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2256879C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2004 |
|
RU2257545C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ | 2007 |
|
RU2346240C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2003 |
|
RU2251078C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 1996 |
|
RU2114395C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 2002 |
|
RU2206067C1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2138018C1 |
Изобретение относится к гироскопическому приборостроению и может быть использовано в навигации морских, воздушных и наземных объектов, а также для гравиметрических и маркшейдерских работ. Цель изобретения - упрощение реализации способа при повышении его точности. В способе выходные параметры вырабатываются по сигналам акселерометров и датчиков углов качек не менее двух гироплатформ, в двухосном кардановом подвесе с трехстепенным гироскопом каждая, а управляющие сигналы гироскопов задаются так, чтобы обеспечить разную величину скоростной девиации у каждой стабилизированной гироплатформы и в то же время обеспечить отсутствие баллистических девиаций. Закон поведения скоростной девиации у гироплатформ задают из условия наименьшего влияния инструментальных погрешностей на точность выработки выходных параметров. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, установленных по осям приборного трехгранника, связанного с гироплатформой, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопов и вычисление навигационных параметров и вертикали места на основе полученной информации о составляющих абсолютной угловой скорости приборного трехгранника, отличающийся тем, что дополнительно измеряют составляющие кажущегося ускорения при помощи акселерометров, установленных не менее чем на одной дополнительной гироплатформе, сигналы управления основной и дополнительной гироплатформами формируют из условия обеспечения неравенства скоростных и отсутствия баллистических девиаций, а также из условия минимизации влияния инструментальных погрешностей на точность выработки навигационных параметров, при этом горизонтальные составляющие абсолютной угловой скорости определяют по составляющим кажущегося ускорения, измеряемым при помощи горизонтальных акселерометров, установленных по одноименным осям гироплатформ, или по углам разности наклона осей кинетических моментов гироскопов относительно плоскости горизонта гироплатформ с учетом величин скоростных девиаций гироплатформ, а вертикальную составляющую абсолютной угловой скорости определяют по составляющим кажущегося ускорения, измеряемым при помощи горизонтальных акселерометров, установленных по одноименным осям гироплатформ, с использованием информации о горизонтальных составляющих абсолютной угловой скорости.
| Кошляков В.Н | |||
| Задачи динамики твердого тела и прикладной теории гироскопов | |||
| М.: Наука, 1985, с.236-248. |
