Изобретение относится к гироскопическому приборостроению и может быть использовано для обеспечения навигации морских, воздушных и наземных движущихся объектов.
Известен способ выработки навигационных параметров и вертикали места [1]. Этот способ включает измерение составляющих кажущегося ускорения при помощи акселерометров, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа, определение навигационных параметров.
Недостатком этого способа является ограниченная возможность конструктивов исполнения.
Целью изобретения является расширение функциональных и конструктивных возможностей.
Цель достигается тем, что гироплатформой управляют сигналами, содержащими сигналы, пропорциональные составляющим кажущегося ускорения, выработанные акселерометрами, которые обеспечивают инвариантность выработки скоростной девиации гироплатформы относительно плоскости горизонта, при этом с помощью оптической следящей системы, используя значения сигналов акселерометров, вырабатывают компасный курс объекта и составляющие абсолютной угловой скорости трехгранника Дарбу, а по составляющим абсолютной угловой скорости трехгранника Дарбу и по значению компасного курса объекта определяют навигационные параметры: географический курс объекта и его координаты места.
Проиллюстрируем предлагаемый способ на следующем примере. На фиг.1 представлена функциональная схема гироскопической навигационной системы, где приняты следующие обозначения:
1 - гиростабилизированная платформа в двухосном карданном подвесе, наружная ось которого направлена по продольной оси объекта;
2 - блок управления гироплатформой и выработки навигационных параметров;
3 - блок управления двигателями стабилизации в горизонте;
4 - трехстепенной гироскоп;
5, 6 - датчики момента гироскопа;
7, 8 - датчики углов гироскопа;
9, 10, 11 - акселерометры;
12, 13 - двигатели стабилизации в горизонте;
14 - датчик килевой качки;
15 - датчик бортовой качки;
16 - источник света оптической следящей системы;
17 - фотодиодная матрица или фотодиодная линейка;
18 - блок управления азимутальным следящим двигателем;
19 - азимутальный следящий двигатель оптической следящей системы;
20 - азимутальный датчик угла.
Гироскопическая навигационная система содержит гиростабилизированную платформу 1, блок управления гироплатформой и выработки навигационных параметров 2, на гироплатформе 1 расположен трехстепенной гироскоп 4 с датчиками моментов 5, 6 и датчиками углов 7, 8, два акселерометра 9 и 10, оси чувствительности которых ортогональны и находятся в плоскости гироплатформы 1, акселерометр 11, ось чувствительности которого перпендикулярна плоскости гироплатформы 1, выходы акселерометров 9, 10 11 и выходы датчиков углов качек 14 и 15 соединены с блоком управления гироплатформой и выработки выходных параметров 2, выходы которого соединены с датчиками момента гироскопа 5, 6, входы блока управления двигателями стабилизации в горизонте 3 соединены с выходами датчиков углов 7, 8 гироскопа 4, выходы блока управления двигателями стабилизации в горизонте 3 соединены с соответствующими двигателями стабилизации 12, 13, источник света оптической следящей системы 16, луч света которого перпендикулярен плоскости гироплатформы 1 и направлен по оси кинетического момента гироскопа H, выход источника света 16 связан со входом фотодиодной матрицы 17, расположенной на отрабатывающей части оптической следящей системы и связанной с ротором азимутального следящего двигателя 19, статор азимутального следящего двигателя расположен на корпусе прибора, ось вращения азимутального следящего двигателя перпендикулярна плоскости палубы, выход фотодиодной матрицы 17 связан со входом блока управления азимутальным следящим двигателем 18, выход которого связан со входом азимутального следящего двигателя 19. Датчик 20 соединен с блоком 2.
Гироскопическая навигационная система функционирует следующим образом: гироплатформа 1 с помощью двигателей стабилизации 12, 13 по сигналам рассогласования датчиков углов гироскопа 7, 8 все время удерживается в одной плоскости с кожухом гироскопа 4. Кожух гироскопа 4 вместе с гиростабилизированной платформой 1 приводится в положение, наклоненное по отношению к плоскости горизонта на угол скоростной девиации, и удерживается в этом положении с помощью моментов, накладываемых через датчики момента гироскопа 5, 6 по сигналам, вырабатываемым в блоке управления гироплатформой 2.
При надлежащем выборе управляющих сигналов гироплатформы, включающих сигналы, пропорциональные составляющим кажущегося ускорения, выработанные акселерометрами, составляющие скоростной девиации гироплатформы могут быть

где β, γ - составляющие скоростной девиации гироплатформы;
 - горизонтальная составляющая абсолютной угловой скорости объекта;
- горизонтальная составляющая абсолютной угловой скорости объекта;
R - радиус Земли;
KГК - компасный курс объекта;
ω0 - частота Шулера;
n - коэффициент пропорциональности.
Значения составляющих скоростной девиации гироплатформы β и γ указывают на то, что перпендикуляр к плоскости гироплатформы всегда будет находиться в плоскости компасного меридиана, направление которого определяет вектор  .
.
С помощью оптической следящей системы измеряют угол между направлением перпендикуляра к плоскости гироплатформы и наружной осью карданного подвеса. Этот угол характеризует значение компасного курса в плоскости палубы.
Используя значение этого угла, значения углов качек, с датчиков углов качек значение сигнала фотодиодной линейки, по ее длине (или соответствующего сигнала фотодиодной матрицы) определяют значение угла между перпендикуляром к плоскости гироплатформы и плоскостью горизонта δпр., характеризующего величину скоростной девиации гироплатформы, а также значение компасного курса объекта в плоскости горизонта  и углы качек объекта θ и ψ относительно плоскости горизонта.
и углы качек объекта θ и ψ относительно плоскости горизонта.
Для того чтобы β и γ соответственно имели значения (1), управляющие сигналы гироскопа должны иметь вид (для n<1 cosβ=cosγ≅1).

Где ax, ay - сигналы акселерометров, оси чувствительности которых лежат в плоскости гироплатформы;
 - приборные значения соответствующих величин. При указанных скоростных девиациях β и γ сигналы акселерометров будут (без учета динамических и инструментальных погрешностей):
- приборные значения соответствующих величин. При указанных скоростных девиациях β и γ сигналы акселерометров будут (без учета динамических и инструментальных погрешностей):
Зная  , по сигналам акселерометров ax и ay можно определить
, по сигналам акселерометров ax и ay можно определить  Сигнал az дает дополнительную информацию для определения Vпр. и r1пр., а также для улучшения динамики системы.
Сигнал az дает дополнительную информацию для определения Vпр. и r1пр., а также для улучшения динамики системы.
Для сопровождающего трехгранника Дарбу x1 y1 z1 составляющие абсолютной угловой скорости суть:
Ωx1=0,  Ωz1=z1
Ωz1=z1
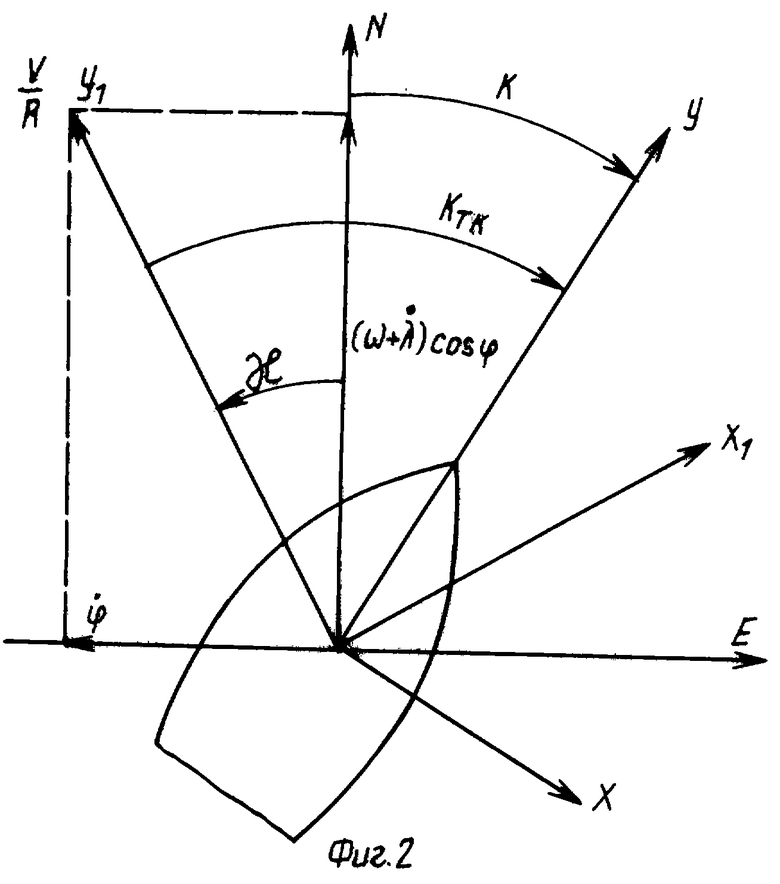
Широту места ϕпр., долготу места λпр. и курс объекта Кпр. (см. фиг.2) найдем из следующих соотношений:



Где  - угол между направлением
- угол между направлением  и направлением географического меридиана;
и направлением географического меридиана;
ω - скорость Земли.
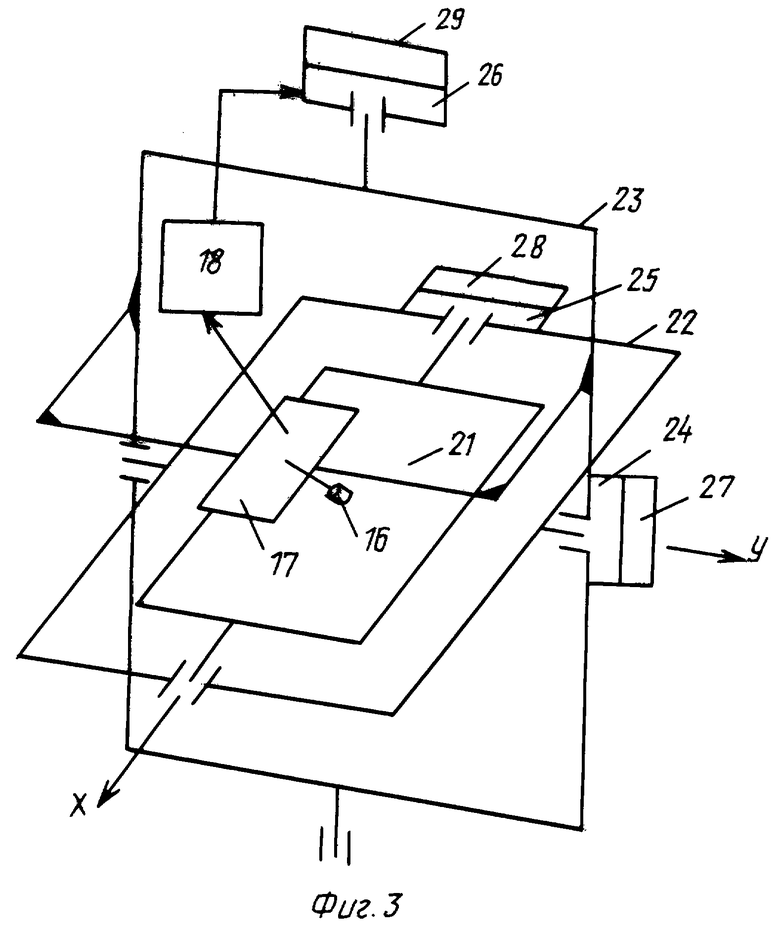
В качестве примера для описания способа рассматривалась гироскопическая система в двухосном карданном подвесе. Предлагаемый способ может быть реализован гироскопической системой и в трехосном карданном подвесе (см. фиг.3).
На фиг.3 изображены:
21 - гироплатформа с гироскопом и акселерометрами;
22, 23 - карданные кольца;
24, 25 - двигатели стабилизации;
26 - двигатель стабилизации или следящий двигатель оптической следящей системы;
27, 28, 29 - датчики углов;
16 - источник света оптической следящей системы;
17 - фотодиодная матрица или фотодиодная линейка;
18 - блок управления азимутальным следящим двигателем;
Тогда горизонтные оси карданного подвеса не будут связаны с объектом. Они будут связаны с приборным сопровождающим трехгранником. В этом случае гироскопическая система может функционировать и без оптической следящей системы при больших значениях скоростной девиации n>1. Двигатели стабилизации по осям OY и OZ могут управляться от одного датчика угла гироскопа. Для случая, когда n>1, чтобы сохранить инвариантность заданной скоростной девиации, управляющие сигналы гироскопа Ωx и Ωy, кроме сигналов, пропорциональных сигналам акселерометров, вместе с сигналами, зависящими от  , могут иметь сигналы, зависящие от значения самой скоростной девиации
, могут иметь сигналы, зависящие от значения самой скоростной девиации  , и могут учитывать члены, пропорциональные значению производной
, и могут учитывать члены, пропорциональные значению производной  . Предлагаемый способ может быть реализован и в бесплатформенной инерциальной системе. Для улучшения тактико-технических характеристик можно использовать внешнюю навигационную информацию. Как видно из системы уравнений (3), используя сигналы трех акселерометров, можно определить три неизвестных параметра
. Предлагаемый способ может быть реализован и в бесплатформенной инерциальной системе. Для улучшения тактико-технических характеристик можно использовать внешнюю навигационную информацию. Как видно из системы уравнений (3), используя сигналы трех акселерометров, можно определить три неизвестных параметра  ;
;  и
и  . Этот способ может быть использован самостоятельно. В этом случае не требуется вообще оптическая следящая система. В качестве примера здесь рассматривался один из возможных вариантов оптической следящей системы. Возможны и другие варианты, например, когда используется зеркало, установленное в плоскости гироплатформы, а источник света расположен внутри корпуса прибора с одной стороны, а фотодиодная матрица внутри корпуса прибора с другой стороны, или когда состав оптической следящей системы ограничен источником света и кольцевой фотодиодной матрицей. Следует отметить, что можно сформировать управляющие сигналы гироскопа, опираясь на ту же самую исходную информацию таким образом, чтобы скоростная девиация β и γ зависели от переменного n, в частности от
. Этот способ может быть использован самостоятельно. В этом случае не требуется вообще оптическая следящая система. В качестве примера здесь рассматривался один из возможных вариантов оптической следящей системы. Возможны и другие варианты, например, когда используется зеркало, установленное в плоскости гироплатформы, а источник света расположен внутри корпуса прибора с одной стороны, а фотодиодная матрица внутри корпуса прибора с другой стороны, или когда состав оптической следящей системы ограничен источником света и кольцевой фотодиодной матрицей. Следует отметить, что можно сформировать управляющие сигналы гироскопа, опираясь на ту же самую исходную информацию таким образом, чтобы скоростная девиация β и γ зависели от переменного n, в частности от
n=n0+n1sinΩt
В этом случае можно оценивать инструментальные погрешности системы, т.к. они будут модулированы на частоте Ω в выходных навигационных параметрах. Сравнивая одноименные выходные параметры системы с параметрами, выработанными другим источником навигационной информации, погрешности которого не меняются на частоте Ω, оценим инструментальные погрешности системы.
Источники информации:
1. В.А. Беленький - Патент РФ № 2000544.
Использование: для обеспечения навигации движущихся объектов. Сущность изобретения: измеряют составляющие кажущегося ускорения при помощи акселерометров, формируют сигналы управления гироплатформой и отрабатывают сформированные сигналы при помощи гироскопа. При этом гироплатформой управляют сигналами, содержащими сигналы, пропорциональные составляющим кажущегося ускорения, выработанные акселерометрами, которые обеспечивают инвариантность выработки скоростной девиации гироплатформы относительно плоскости горизонта. С помощью оптической следящей системы вырабатывают компасный курс. По сигналам акселерометров вырабатывают составляющие абсолютной угловой скорости трехгранника Дарбу, а также значения составляющих скоростной девиации гироплатформы относительно плоскости горизонта. По составляющим абсолютной угловой скорости трехгранника Дарбу и по значению компасного курса определяют навигационные параметры: курс объекта и его координаты места. 3 ил.

Способ выработки навигационных параметров и вертикали места, включающий измерение составляющих кажущегося ускорения при помощи акселерометров, установленных на гироплатформе, формирование сигналов управления гироплатформой, отработку сформированных сигналов при помощи гироскопа, определение навигационных параметров, отличающийся тем, что гироплатформой управляют сигналами, содержащими сигналы, пропорциональные составляющим кажущегося ускорения, выработанными акселерометрами, которые обеспечивают инвариантность выработки скоростной девиации гироплатформы относительно плоскости горизонта, при этом, с помощью оптической следящей системы, используя значения сигналов акселерометров, вырабатывают компасный курс объекта и составляющие абсолютной угловой скорости трехгранника Дарбу, а по составляющим абсолютной угловой скорости трехгранника Дарбу и по значению компасного курса объекта определяют навигационные параметры: географический курс объекта и его координаты места.
| RU 2000544 C1, 07.09.1993 | |||
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ВЕРТИКАЛИ МЕСТА | 1998 |
|
RU2147731C1 |
| РЕПНИКОВ В.А | |||
| и др | |||
| Гироскопические системы, М., Машиностроение, 1983, с.32 | |||
| РИВКИН С.С | |||
| Теория гироскопических устройств, ч.2, Л | |||
| Судостроение, 1964, с.445-449 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |
| SU 1773157 A1, 19.12.1989 | |||
| Способ начальной выставки в азимуте самоориентирующегося указателя курса с каналами горизонтальной коррекции с невертикальной осью наружной рамки | 1990 |
|
SU1815596A1 |
| US 4070674 A, 24.01.1978. | |||

